机电一体化(第6章 机电一体化系统建模与分析)
- 格式:ppt
- 大小:750.50 KB
- 文档页数:46
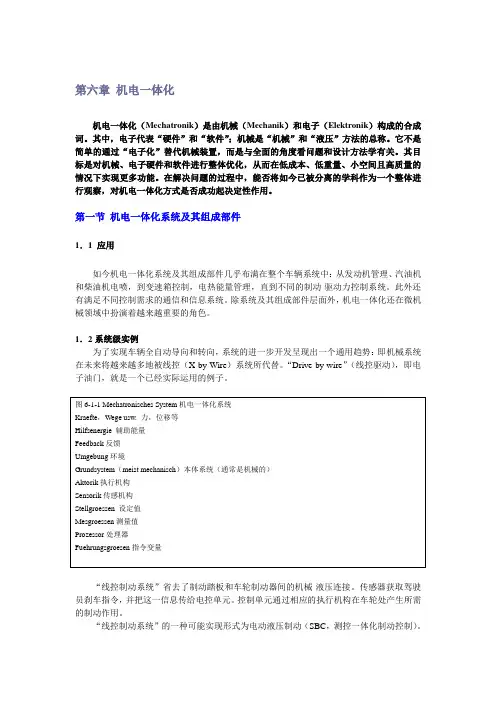
第六章机电一体化机电一体化(Mechatronik)是由机械(Mechanik)和电子(Elektronik)构成的合成词。
其中,电子代表“硬件”和“软件”;机械是“机械”和“液压”方法的总称。
它不是简单的通过“电子化”替代机械装置,而是与全面的角度看问题和设计方法学有关。
其目标是对机械、电子硬件和软件进行整体优化,从而在低成本、低重量、小空间且高质量的情况下实现更多功能。
在解决问题的过程中,能否将如今已被分离的学科作为一个整体进行观察,对机电一体化方式是否成功起决定性作用。
第一节机电一体化系统及其组成部件1.1 应用如今机电一体化系统及其组成部件几乎布满在整个车辆系统中:从发动机管理、汽油机和柴油机电喷,到变速箱控制,电热能量管理,直到不同的制动-驱动力控制系统。
此外还有满足不同控制需求的通信和信息系统。
除系统及其组成部件层面外,机电一体化还在微机械领域中扮演着越来越重要的角色。
1.2系统级实例为了实现车辆全自动导向和转向,系统的进一步开发呈现出一个通用趋势:即机械系统在未来将越来越多地被线控(X by Wire)系统所代替。
“Drive by wire”(线控驱动),即电子油门,就是一个已经实际运用的例子。
“线控制动系统”省去了制动踏板和车轮制动器间的机械-液压连接。
传感器获取驾驶员刹车指令,并把这一信息传给电控单元。
控制单元通过相应的执行机构在车轮处产生所需的制动作用。
“线控制动系统”的一种可能实现形式为电动液压制动(SBC,测控一体化制动控制)。
在实施制动时或者在通过电子稳定程序ESP进行稳定性干预时,SBC控制器计算出每个车轮上期望的理想制动压力。
由于每个车轮所需的理想制动压力单独计算,且每个车轮的实际制动力独立获取,所以能通过轮压调节器对每个车轮的制动压力进行独立调节。
这四个压力调节器各由一个输入和输出阀组成,由控制器的驱动电路控制,相互配合,从而获得最佳的制动压力闭环调节。
在共轨系统中,压力生成和喷射是解耦的。
********************学院机电一体化专业《机电一体化技术》教学大纲制定人:机电系******一、课程的性质、任务《机电一体化技术》机电一体化专业的一门专业课,其任务是使学生获得利机电一体化技术解决各种实际工程问题所需的知识,结合生产实际为本专业的应用打下基础。
二、课程的基本要求1、了解机电一体化应用系统的基本原理和组成特点。
2、掌握机电一体化应用系统的机械技术3、掌握机电一体化应用系统的传感检测技术4、掌握机电一体化应用系统的伺服驱动技术5、掌握机电一体化应用系统的控制和接口技术6、掌握机电一体化应用系统的整体设计技术7、掌握机电一体化应用系统的机器人设计技术三、课程内容一、机电一体化概述教学要求教学内容:1. 1机电一体化的基本概念1. 2机电一体化系统的基本组成1. 3机电一体化技术的理论基础与关键技术1. 4机电一体化产品1. 5机电一体化的现状与发展前景基本要求:了解机电一体化技术的特点。
二、机电一体化机械技术教学要求教学内容:2. 1概述2. 2机械传动机构2. 3机械导向结构2. 4机械的支承结构2. 5机械执行机构基本要求:了解机电一体化机械技术的特点。
掌握与机电一体化相关的机械基础知识和设计要点三、机电一体化传感检测技术教学要求教学内容:3.1传感器组成与分类3. 2典型常用传感器3. 3传感器的选择方法3. 4传感器数据采集及其与计算机接口基本要求:了解机电一体化传感器技术的特点。
掌握与机电一体化相关的传感器知识和设计要点四、机电一体化伺服驱动技术教学要求教学内容:4. 1概述4. 2典型执行元件4. 3执行元件功率驱动接口基本要求:了解机电一体化执行器技术的特点。
掌握与机电一体化相关的执行器知识和设计要点五、机电一体化控制及接口技术教学要求教学内容:5. 1控制技术概述5. 2可编程序控制器技术5. 3人机接口技术5. 4机电接口技术基本要求:了解机电一体化接口技术的特点。
机电一体化系统中的动力学建模与控制算法研究随着科技的不断进步和发展,机电一体化系统成为了现代工程领域中的一个重要研究方向。
机电一体化系统具有多学科的特点,融合了机械工程、电气工程、控制工程等多个学科的知识和理论。
其中,动力学建模与控制算法的研究是机电一体化系统中的一个关键问题。
动力学建模是机电一体化系统研究中的基础工作之一。
动力学建模的目标是描述系统在不同条件下的运动规律和响应特性。
通过建立系统的动力学模型,可以更好地理解系统的行为,并分析系统的性能。
对于机电一体化系统而言,动力学建模涉及到机械部分的运动学和动力学,以及电气部分的电路模型和电机特性等多个方面。
在动力学建模过程中,机械部分的运动学和动力学是关键因素之一。
运动学研究物体在空间中的运动规律,包括位置、速度和加速度等。
动力学则是研究物体受到外力作用时的运动规律,包括力学平衡、牛顿定律、能量守恒等。
在机械部分的动力学建模中,需要考虑杆件的运动、连接处的约束和关节的旋转等因素,以建立精确的动力学模型。
另一方面,电气部分的建模也是机电一体化系统中不可忽视的一部分。
电气部分的建模包括电路模型和电机特性的建立。
电路模型描述了电气元件之间的连接关系和电流电压之间的关系,它是动力学模型中电气部分的核心要素。
在机电一体化系统中,电机通常作为机械系统的驱动装置,因此必须对电机的特性进行建模,以描述电机的转速、转矩和功率等参数。
建立了机电一体化系统的动力学模型后,就需要设计相应的控制算法来调节和控制系统的运动。
控制算法是机电一体化系统中另一个重要的研究方向。
控制算法的目标是根据系统的运动规律和外部输入,调节系统的状态和输出,使系统达到所期望的性能和响应。
在机电一体化系统中,常用的控制算法包括PID控制、模糊控制、自适应控制等。
PID控制是一种广泛应用的经典控制算法,通过比较当前误差、误差的变化率和误差的积分,调节系统的输出。
模糊控制是一种基于模糊逻辑的控制算法,它通过建立模糊规则和模糊推理,实现对系统的控制。
机电一体化系统的建模与仿真技术研究机电一体化系统是由机械、电子、控制、软件等多个领域组成的智能系统,在现代工业领域中得到了越来越广泛的应用。
机电一体化系统具有高度的智能化、机动化和自动化特点,使现代机械设备不断地朝着高速度、高精度、高质量和高效能的方向发展,成为生产力的重要支撑。
机电一体化系统的建模与仿真技术是现代化机械设计的重要手段之一,其目的是通过计算机仿真来验证机械系统的设计和功能,从而提高机械系统的可靠性和性能。
机电一体化系统的建模与仿真技术涉及到机械、电子、控制、软件等多个领域,需要采用多学科的知识和技术来解决问题。
机电一体化系统的建模方法主要有物理建模、系统建模和行为建模三种。
物理建模主要是通过解析方法或模型法来描述、建立机械系统的物理模型,即将系统模型化为组成其系统的基本部件,通过连接及约束关系组成完整的系统模型。
系统建模是将机械系统分解为各个部件,建立系统的框图,并通过框图来描述各个部件之间的关系和信号传递。
行为建模是通过对系统的运动规律、逻辑关系和控制策略等进行描述来建立系统的行为模型。
机电一体化系统的仿真方法主要有数学仿真、逻辑仿真和动态仿真三种。
数学仿真是运用计算机数值计算的方法,用算法对模型进行数学求解,从而得出系统的运行情况。
逻辑仿真是根据系统的逻辑关系和控制策略建立系统的逻辑模型,通过模拟系统的控制过程来验证系统的控制能力。
动态仿真是将机械系统的动态运动、工作过程进行全过程的仿真模拟,通过动态仿真来验证系统的性能。
在机电一体化系统的建模与仿真技术中,多学科的知识和技术是不可或缺的。
机械设计工程师需要在设计机械系统时掌握机械、材料、力学等相关知识,通过物理建模建立机械系统的物理模型,并通过计算机进行数学仿真和动态仿真。
电子工程师需要掌握电子、电路、信号等知识,通过逻辑建模建立系统的逻辑模型,并通过逻辑仿真验证系统的控制策略和控制能力。
控制工程师需要掌握控制算法、控制方法等知识,通过行为建模建立系统的行为模型,并通过数学仿真和动态仿真验证系统的运行效果。
机电一体化系统的建模与仿真机电一体化系统是近年来工业自动化发展的一个重要方向,它将机械、电气、电子、计算机等多个学科有机结合,实现了产品的智能化和高效化。
在机电一体化系统的设计和开发过程中,建模与仿真是非常关键的一环。
本文将探讨机电一体化系统的建模与仿真的重要性、方法和应用。
一、机电一体化系统建模的重要性1. 减少开发成本和时间:通过建模与仿真,可以在产品实际制造之前发现问题和缺陷,减少开发过程中的试错成本和时间。
同时,可以在虚拟环境中对系统进行优化,提高产品的性能和质量。
2. 提高系统可靠性:通过建模与仿真,可以深入分析系统的运行过程,预测出潜在的故障和问题,并进行针对性的优化。
这样可以提高系统的可靠性和稳定性,减少故障率和维修成本。
3. 优化系统性能:建模与仿真可以帮助工程师在设计阶段进行多种方案的比较和评估,找出最优解决方案。
通过对系统进行仿真和测试,可以预测系统在不同工况下的性能,并进行优化调整,以实现更好的工作效果。
二、机电一体化系统建模与仿真的方法1. 建模方法(1)物理模型:通过对机电一体化系统的结构、元件和工作原理进行建模,可以快速构建一个具有物理实际意义的模型。
采用物理模型可以更好地反映系统的实际情况,但是建模过程相对较复杂。
(2)数据驱动模型:通过收集和分析大量的实验数据,利用统计学和机器学习等方法建立数学模型。
数据驱动模型可以根据实际数据自动调整和更新,适用于一些复杂的非线性系统。
2. 仿真方法(1)数学仿真:利用计算机进行大规模的数值计算,对系统进行仿真模拟。
数学仿真可以基于系统的物理模型和数学模型,通过输入不同的参数和条件,模拟系统在不同工况下的运行状态,预测系统的性能指标。
(2)软件仿真:通过专门的软件工具,如MATLAB、Simulink等进行系统建模和仿真。
这些软件提供了丰富的模型库和仿真环境,可以方便地进行建模和仿真分析。
同时,软件仿真还可以与物理实验相结合,进行混合仿真,提高仿真的准确性。

机电⼀体化系统设计教学⼤纲张建民版第四版《机电⼀体化系统设计》教学⼤纲⼀、课程名称1、中⽂名称:机电⼀体化系统设计2、英⽂名称:Mechatronics System Design⼆、学时总学时:90学时,其中,理论学时:72学时,实践学时:18学时学分:4学分三、开课学期第7学期四、课程考核要求考查,平时成绩占总成绩的30%,实验成绩占总成绩的20%,考试成绩占总成绩的50%。
五、课程概述本课程是机械电⼦⼯程专业的专业必修课。
本课程从系统的观点出发,利⽤机械技术和电⼦技术,通过机电有机结合构造最佳的机电系统。
课程性质:机械电⼦⼯程专业必修课。
六、适⽤专业机械电⼦⼯程、机械制造及其⾃动化等。
先⾏、后续课程情况:先⾏课:机械原理,机械设计,电⼯学,数字电⼦技术,模拟电⼦技术,控制⼯程基础,微机原理,电⽓控制技术,数控技术;后续课:⽆。
七、课程的⽬的与任务1、课程⽬的本课程是机械电⼦⼯程专业的专业必修课,通过本课程的学习,使学⽣建⽴机电产品的⼀体化设计思想,把电⼦技术、传感器技术,⾃动控制技术、计算机技术和机械技术有机地结合起来,了解各项技术之间的接⼝关系,能运⽤所学知识对机电⼀体化产品进⾏分析或设计,使学⽣具备解决⽣产过程中机电设备的运⾏、管理、维护和改造等实际问题的初步能⼒。
培养学⽣综合运⽤所学基础理论和专业知识进⾏创新设计的能⼒。
2、课程的基本要求1)学习机电⼀体化基本概念,理解机电⼀体化系统中各结构要素在系统中的作⽤和相互关系,初步建⽴机电产品的系统化设计思想。
2)了解机电⼀体化系统中常⽤传感器、传动机构、动⼒驱动装置和计算机控制系统种类和特点。
3)熟悉机电⼀体化产品的设计⽅法和⼯程路线,能够针对具体的机电⼀体化产品确定产品开发技术路线。
4)掌握机电⼀体化系统中机械、传感检测、动⼒、控制等基本结构要素的技术特点,掌握典型装置的技术原理和使⽤⽅法。
5)了解典型机电⼀体化产品的构成、特点和设计⽅法,学会设计简单的机电⼀体化产品。
机电一体化系统的建模与优化设计随着科技的不断发展,机电一体化系统在现代工程领域中发挥着越来越重要的作用。
机电一体化系统是将机械、电气和电子等多个学科融合在一起,通过协同运作实现更加高效、智能化的工程系统。
在建模与优化设计方面,机电一体化系统具有许多挑战和机遇。
在机电一体化系统建模的过程中,首先需要对系统的结构和功能进行详细的分析和理解。
通过对各个子系统的功能需求和性能指标进行明确,可以为建模提供指导。
同时,还需要考虑系统中各个部分之间的相互影响和耦合关系,以保证系统能够正常运行。
建模的过程中需要采用合适的数学模型和仿真工具,例如有限元分析、多体动力学等,以对系统的行为进行准确的描述和预测。
机电一体化系统的优化设计是一个复杂而繁琐的任务。
在优化设计中,需要考虑多个因素和约束条件,以找到一个最优的解决方案。
首先,需要针对不同的性能指标进行权衡和优化。
例如,在能效方面,可以通过设计高效的电机和传动装置来提高系统的能效;在可靠性方面,可以通过增加备件和优化控制策略来提高系统的可靠性。
其次,需要考虑系统在不同工况下的性能,并进行综合优化。
例如,在机器人领域,需要考虑机器人在不同环境下的行走速度、稳定性和能耗等指标,以满足实际应用的需求。
最后,还需要考虑优化设计的经济性和可制造性。
设计中需要综合考虑成本、材料和加工等因素,以确定最佳的解决方案。
为了实现机电一体化系统的建模和优化设计,需要运用到多个学科的知识和技术。
机械工程、电气工程、控制工程等学科共同协作,为系统的设计和优化提供支持。
同时,还需要与新兴技术和方法进行结合。
例如,人工智能和大数据分析等技术的应用,可以提供更为精确和高效的建模和优化手段。
此外,还需要关注工程实践中的创新和应用。
通过与实际工程项目的合作和实验验证,可以提高机电一体化系统设计的可行性和实用性。
总而言之,机电一体化系统的建模与优化设计是一个复杂而关键的任务。
在建模过程中,需要全面理解和分析系统的结构和功能,并采用适当的数学模型和仿真工具进行描述和预测。