物理-02-杠杆分类及应用
- 格式:docx
- 大小:435.09 KB
- 文档页数:11
杠杆类别及应用杠杆是一种由力臂和力点组成的简单机械装置,用于增加力量,通过应用杠杆原理可以实现多种应用。
根据不同的特点和应用方式,杠杆可以分为三类:一级杠杆、二级杠杆和三级杠杆。
下面将详细介绍这三类杠杆及其应用。
一级杠杆是最简单的杠杆,指的是力点和支点在力臂同一侧的杠杆。
一级杠杆通过改变力点和支点之间的距离来增大力的作用效果。
一级杠杆广泛应用于日常生活中,比如推门、开瓶盖、刷马桶等。
其中,用力点在餐桌下方推桌面上的物品,就是一级杠杆的应用。
人类利用滑动门、自动门等结构,不需要花费过多力气就可以轻松推开门,这是借助一级杠杆的原理实现的。
二级杠杆是指力点和支点位于力臂的不同侧的杠杆。
二级杠杆的作用是改变力的方向和大小。
在二级杠杆中,力点的方向和力臂的方向不一致,通过改变力臂的长度可以增大力的作用效果。
二级杠杆广泛应用于建筑工程、工业生产和机械设备中。
比如,使用手动螺丝刀旋转螺丝时,手动螺丝刀就是一个二级杠杆。
通过手动螺丝刀的转动,可以实现对螺丝的旋转,完成拧紧或松开螺丝的操作。
三级杠杆是指力点和支点分别位于力臂的两侧的杠杆。
三级杠杆可以增大力点的速度而减小力的大小。
三级杠杆在科技和工程领域得到广泛应用。
比如,使用剪刀剪纸时,剪刀就是一个典型的三级杠杆。
通过手指的收缩和展开,可以使剪刀的刃部进行旋转,从而实现切割纸张的操作。
除了以上三类常见的杠杆应用之外,杠杆原理还在其他领域得到广泛应用。
例如,经济学中的杠杆效应是指通过借债等手段来增大投资,从而增加利润的方式。
金融市场中的杠杆交易是指使用借来的资金进行投资,以提高投资收益的方式。
在物理学中,杠杆原理也被应用于机械装置和运动学等领域,如平衡杆、悬挂装置和摩擦力分析等。
总之,杠杆是一种应用广泛的简单机械装置,通过改变力点、支点和力臂之间的关系,可以实现各种不同的应用。
一级杠杆用于增加力量,二级杠杆用于改变力的方向和大小,三级杠杆用于增大力点的速度。
杠杆的应用涵盖了日常生活、建筑工程、机械装置、经济学等多个领域。

物理杠杆的总结归纳杠杆是一种简单机械,广泛应用于各种领域。
物理杠杆可用于增大力的大小、改变力的方向,以及调节力和速度的比例。
本文将对物理杠杆的原理、种类、应用以及相关公式进行总结和归纳。
一、物理杠杆的原理物理杠杆原理是基于力的平衡原理和角动量守恒原理。
根据力的平衡原理,杠杆平衡时,力矩相等。
力矩是由力乘以杠杆臂长而产生的。
而角动量守恒原理指出,一个物体在一点的角动量等于另一物体在同一点的角动量。
这两个原理被应用于物理杠杆的计算和运用中。
二、物理杠杆的种类1. 一级杠杆:一级杠杆是指杠杆支点在力和负载之间的情况。
当力和负载在杠杆支点两侧,且力矩相等时,杠杆达到平衡。
例子包括剪刀、开瓶器等。
2. 二级杠杆:二级杠杆是指杠杆支点与力和负载之间形成三个不同位置的情况。
当力矩乘以负载距离与力距离的比例相等时,杠杆达到平衡。
例子包括推门、挖土机臂等。
3. 三级杠杆:三级杠杆是指杠杆支点与力和负载之间形成四个不同位置的情况。
当力和负载在杠杆两侧,且力矩相等时,杠杆达到平衡。
例子包括担架、夹钳等。
三、物理杠杆的应用1. 机械工程:物理杠杆在机械工程中有着广泛应用,可以用于提升重物、改变方向、调节力的大小等。
例如,起重机、挖掘机等机械装置中都运用了物理杠杆的原理。
2. 测量仪器:物理杠杆可用于制造测量仪器,如秤、天平等。
通过杠杆的原理,可以实现对物体质量的测量,从而广泛应用于科学实验、贸易和医疗等领域。
3. 人体运动:在人体的运动中,关节可以看作杠杆。
例如,手臂的弯曲和伸展,腿部的跳跃和踢腿等动作,都需要杠杆原理的支持。
四、物理杠杆的关键公式1. 力矩公式:力矩(M)等于力(F)乘以力臂的长度(d)。
M =F * d。
2. 杠杆平衡公式:当杠杆达到平衡时,左侧力矩等于右侧力矩。
F1 * d1 = F2 * d2。
3. 杠杆原理公式:力臂比例等于力比例。
F1 / F2 = d2 / d1。
五、结语物理杠杆作为一种简单机械,对于各个领域有着广泛的应用。
杠杆的种类及应用教案。
杠杆的种类及应用:1.一级杠杆一级杠杆的原理是支点的位置相对于实现负载的力的位置关键。
这种杠杆的例子包括木工锤、拨火棒、桨或撑杆等。
应用: 利用一级杠杆的原理可以轻松地改变或放大力的方向和大小。
例如,在木工领域,用一级杠杆可以用手简单地击打钉子。
同样,在运动场上,撑杆跳高就是一种利用一级杠杆的运动方式。
2.二级杠杆二级杠杆的原理是负载是通过扭曲或弯曲杆来实现的。
这种杠杆的例子包括风琴式安安踏,撑杆悬臂,以及用于开瓶器的钻头。
应用:二级杠杆常用于需要更大的力输出的应用。
例如,在汽车生产线上,使用大型杠杆将发动机从车顶起吊,将其放置在车身上。
同样,使用2级杠杆可以轻松地打开坚固的瓶盖或利用锤子和凿子将一块巨石拆分成小块。
3.三级杠杆三级杠杆是实现更高机械优势的杠杆,其中弯曲的杠杆还连接了第二个辊子或杠杆。
这样做可以减小塑性变形并使变形更加准确。
应用:三级杠杆通常用于更复杂的工作,例如建造大桥,搭建摩天大楼,或进行制造打印板,大型齿轮和精细的机械元件。
三级杠杆还可以用于飞机制造,其中复杂的机械装置必须保持平衡和稳定性。
在实际应用中,杠杆的原理可以广泛应用于大量的设备和装置。
工业利用了杠杆的原理,可以减轻人体主要运动的压力,同时提高生产效率。
此外,杠杆的原理可以用于制造高级制冷设备、升降机和手臂等,帮助人类轻松地处理各种任务。
总结杠杆是一个重要的机械原理,它可以应用在许多生产和生活领域。
不同类型的杠杆对于不同的任务起着不同的作用,无论是在室内还是室外,运动比赛场地还是制造工厂,都有着广泛的应用。
通过了解杠杆的原理和应用,我们可以更好地理解并利用这一基本的物理原理来完成一些具有挑战性的任务。
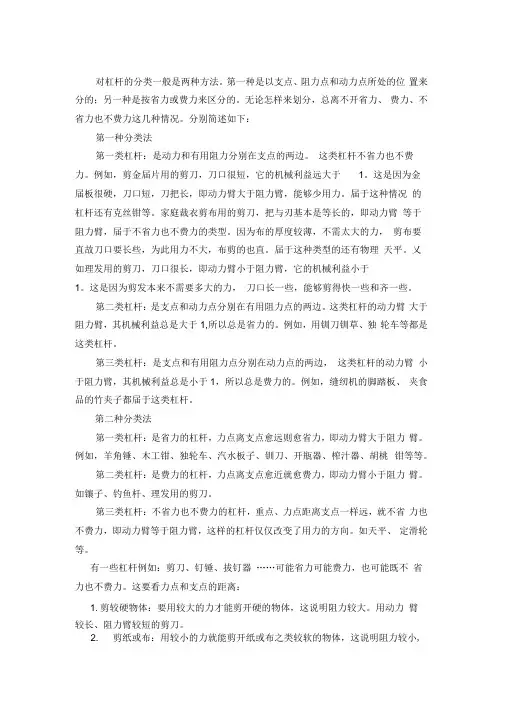
对杠杆的分类一般是两种方法。
第一种是以支点、阻力点和动力点所处的位置来分的;另一种是按省力或费力来区分的。
无论怎样来划分,总离不开省力、费力、不省力也不费力这几种情况。
分别简述如下:第一种分类法第一类杠杆:是动力和有用阻力分别在支点的两边。
这类杠杆不省力也不费力。
例如,剪金届片用的剪刀,刀口很短,它的机械利益远大于1。
这是因为金届板很硬,刀口短,刀把长,即动力臂大于阻力臂,能够少用力。
届于这种情况的杠杆还有克丝钳等。
家庭裁衣剪布用的剪刀,把与刃基本是等长的,即动力臂等于阻力臂,届于不省力也不费力的类型。
因为布的厚度较薄,不需太大的力,剪布要直故刀口要长些,为此用力不大,布剪的也直。
届于这种类型的还有物理天平。
乂如理发用的剪刀,刀口很长,即动力臂小于阻力臂,它的机械利益小于1。
这是因为剪发本来不需要多大的力,刀口长一些,能够剪得快一些和齐一些。
第二类杠杆:是支点和动力点分别在有用阻力点的两边。
这类杠杆的动力臂大于阻力臂,其机械利益总是大于1,所以总是省力的。
例如,用钏刀钏草、独轮车等都是这类杠杆。
第三类杠杆:是支点和有用阻力点分别在动力点的两边,这类杠杆的动力臂小于阻力臂,其机械利益总是小于1,所以总是费力的。
例如,缝纫机的脚踏板、夹食品的竹夹子都届于这类杠杆。
第二种分类法第一类杠杆:是省力的杠杆,力点离支点愈远则愈省力,即动力臂大于阻力臂。
例如,羊角锤、木工钳、独轮车、汽水板子、钏刀、开瓶器、榨汁器、胡桃钳等等。
第二类杠杆:是费力的杠杆,力点离支点愈近就愈费力,即动力臂小于阻力臂。
如镶子、钓鱼杆、理发用的剪刀。
第三类杠杆:不省力也不费力的杠杆,重点、力点距离支点一样远,就不省力也不费力,即动力臂等于阻力臂,这样的杠杆仅仅改变了用力的方向。
如天平、定滑轮等。
有一些杠杆例如:剪刀、钉锤、拔钉器……可能省力可能费力,也可能既不省力也不费力。
这要看力点和支点的距离:1.剪较硬物体:要用较大的力才能剪开硬的物体,这说明阻力较大。
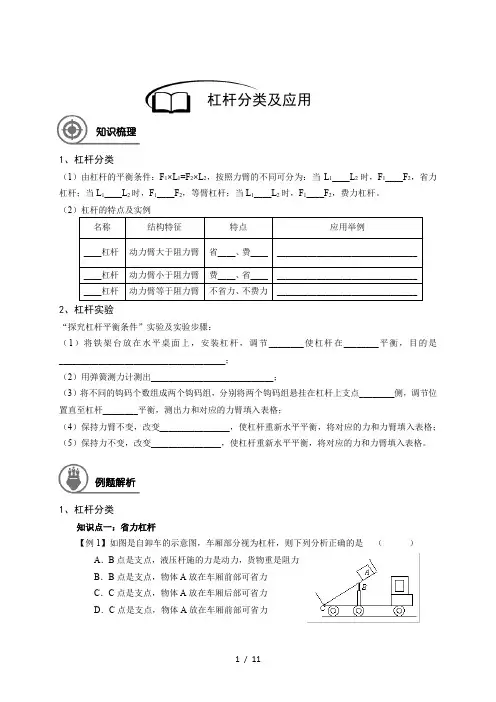
杠杆分类及应用知识梳理1、杠杆分类(1)由杠杆的平衡条件:F1×L1=F2×L2,按照力臂的不同可分为:当L1____L2时,F1____F2,省力杠杆;当L1____L2时,F1____F2,等臂杠杆;当L1____L2时,F1____F2,费力杠杆。
(2名称结构特征特点应用举例____杠杆动力臂大于阻力臂省____、费________________________________________杠杆动力臂小于阻力臂费____、省________________________________________杠杆动力臂等于阻力臂不省力、不费力________________________________2、杠杆实验“探究杠杆平衡条件”实验及实验步骤:(1)将铁架台放在水平桌面上,安装杠杆,调节________使杠杆在________平衡,目的是______________________________________;(2)用弹簧测力计测出____________________________;(3)将不同的钩码个数组成两个钩码组,分别将两个钩码组悬挂在杠杆上支点________侧,调节位置直至杠杆________平衡,测出力和对应的力臂填入表格;(4)保持力臂不变,改变________________,使杠杆重新水平平衡,将对应的力和力臂填入表格;(5)保持力不变,改变________________,使杠杆重新水平平衡,将对应的力和力臂填入表格。
例题解析1、杠杆分类知识点一:省力杠杆【例1】如图是自卸车的示意图,车厢部分视为杠杆,则下列分析正确的是()A.B点是支点,液压杆施的力是动力,货物重是阻力B.B点是支点,物体A放在车厢前部可省力C.C点是支点,物体A放在车厢后部可省力D.C点是支点,物体A放在车厢前部可省力【例2】“给我一个支点和一根足够长的棍,我就能撬起整个地球。
初中物理杠杆知识点杠杆是物理学中研究的一个重要概念,也是我们日常生活中经常会用到的物理原理。
本文将以初中物理课程中关于杠杆的相关知识点为基础,详细介绍杠杆的定义、特性、公式和应用,旨在帮助读者更好地理解和运用杠杆原理。
一、杠杆的定义和特性杠杆是由一个在固定点旋转的刚体构成,它可以通过力的作用实现物体的平衡或运动。
根据固定点的位置和作用力的不同,杠杆可以分为三种类型:一级杠杆、二级杠杆和三级杠杆。
1. 一级杠杆:当固定点位于力的作用点和承受力之间时,称为一级杠杆。
在一级杠杆中,力的作用方向和力臂的方向相同或相反,即力的作用方向远离固定点。
2. 二级杠杆:当固定点位于力的作用点的一侧,承受力的另一侧时,称为二级杠杆。
在二级杠杆中,力的作用方向与力臂的方向相反。
3. 三级杠杆:当固定点位于力臂的一侧,并且力的作用点位于另一侧时,称为三级杠杆。
在三级杠杆中,力的作用方向远离固定点。
杠杆的特性主要包括以下几点:1. 杠杆平衡条件:杠杆在平衡时满足力矩的平衡条件,即承受力的力矩等于作用力的力矩。
2. 力臂:杠杆的力臂是指作用力与固定点之间的垂直距离。
力臂越大,所需力量越小。
3. 力矩:力矩是产生杠杆作用的关键因素,它等于力乘以力臂,表示力对固定点的转动效果。
4. 平衡条件:杠杆的平衡条件是承受力矩等于作用力矩,即F1 × d1 = F2 × d2,其中F1和F2分别为作用力和承受力,d1和d2分别为力臂的长度。
二、杠杆的公式和计算方法根据杠杆的平衡条件和力矩的定义,可以得出杠杆的公式和计算方法。
对于一级杠杆,可以使用以下公式计算承受力的大小:F1 × d1 = F2 × d2其中,F1为作用力,d1为作用力的力臂,F2为承受力,d2为承受力的力臂。
对于二级和三级杠杆,不能直接使用上述公式,需要转化为一级杠杆进行计算。
具体计算方法如下:1. 对于二级杠杆:将承受力和力臂都乘以(-1),变成一级杠杆,即F1 × d1 = F2 × d2。
物理杠杆知识点杠杆是物理学中一个基本的概念,它可以帮助我们理解物体的平衡和力的传递。
本文将介绍一些物理杠杆的基本知识点,包括定义、分类、原理、应用等方面。
1. 定义杠杆是由一个固定点(称为支点)和杠杆臂组成的一个简单机械装置。
它可以用来通过施加力来产生力矩,以达到平衡物体或改变物体的位置的目的。
2. 分类根据支点和施加力的位置,杠杆可以分为三类:一类杠杆、二类杠杆和三类杠杆。
- 一类杠杆:支点位于杠杆的一端,力作用在另一端,例如撬棍。
- 二类杠杆:支点位于杠杆的一端,力作用在支点另一侧,例如手臂。
- 三类杠杆:力作用在支点的一侧,支点位于杠杆的中间位置,例如钳子。
3. 原理杠杆原理是基于角动量守恒定律和力矩平衡定律的基础上的。
根据这两个原理,我们可以推导出杠杆的平衡条件。
- 对一类杠杆,力矩平衡条件为:F1 × d1 = F2 × d2,即力1与力2的乘积等于力臂1与力臂2的乘积。
- 对二类杠杆,力矩平衡条件为:F1 × d1 = F2 × d2,即力1与力2的乘积等于力臂1与力臂2的乘积。
- 对三类杠杆,力矩平衡条件为:F1 × d1 = F2 × d2,即力1与力2的乘积等于力臂1与力臂2的乘积。
4. 应用杠杆在生活中的应用非常广泛,以下是一些常见的应用:- 撬棍:一类杠杆常用于撬起重物或打开紧闭的门窗。
- 手臂:二类杠杆常用于负重和进行力的放大,例如举重运动中的杠铃。
- 钳子:三类杠杆常用于夹取和剪断物体,例如使用钳子修理电器或修剪花草。
5. 杠杆的优势杠杆系统具有以下几个优势:- 力矩放大:通过杠杆的作用,可以在一个较小的力的作用下产生较大的力矩,从而实现更大的力的效果。
- 力的传递:杠杆可以将施加在其中一个杠杆臂上的力传递到另一个杠杆臂上,使得力可以在空间中传递。
- 平衡控制:通过调整施加力的位置和支点的位置,可以实现物体的平衡控制,使得物体保持在平衡状态。
杠杆的工作原理和应用一、杠杆的定义与分类杠杆是一种简单的机械结构,它可以将输入力量放大或改变力的方向。
根据杠杆的构造和作用方式的不同,可以将杠杆分为三类:一级杠杆、二级杠杆和三级杠杆。
1.一级杠杆:一级杠杆指的是输入力和输出力作用在同一直线上,具有等长度的杠杆臂的杠杆。
例如,扳手、锤子等手工工具中常见的杠杆机构就属于一级杠杆。
2.二级杠杆:二级杠杆中,输入力和输出力分别作用在杠杆的两侧,杠杆臂的长度不一致。
例如,剪刀就是一个二级杠杆,用户施加的力作用在一个短臂上,而另一个长臂产生的力输出给剪刀刀片。
3.三级杠杆:三级杠杆是指输入力和输出力与杠杆的不同部位相连,形成一个力的传递链路。
例子有汽车刹车、自行车踏板等。
二、杠杆的工作原理杠杆的工作原理基于力矩的平衡。
力矩是由施加在物体上的力和力臂之间的乘积。
根据力矩的平衡条件,可以推导出杠杆的工作原理。
具体来说,杠杆的工作原理可以用以下公式表示:力1 × 杠杆臂1 = 力2 × 杠杆臂2。
其中,力1和力量2分别代表输入力和输出力,杠杆臂1和杠杆臂2分别代表力1和力2作用的杠杆臂的长度。
根据这个公式,当输入力和输出力的杠杆臂长度比相同时,输入力与输出力的大小成反比。
当输入力的杠杆臂长度小于输出力的杠杆臂长度时,输出力将会放大。
三、杠杆的应用杠杆作为一种简单而常见的机械结构,广泛应用于各个领域。
以下是一些例子:1.力的放大:杠杆可以将输入力放大,提供更大的输出力。
例如,汽车维修工将扳手放大输出力来拧紧螺栓。
2.力的方向改变:杠杆也可以改变力的方向。
例如,铲子就是一个常见的杠杆,用户施加的力向下方,而铲头向上方施加力来挖土。
3.力的传递:杠杆可以在物体之间传递力量。
例如,自行车踏板通过杠杆将骑行者施加在踏板上的力转化为驱动轮的动力。
4.机械平衡:在一些工程领域中,杠杆被用来实现机械平衡。
例如,天平就是一个经典的杠杆装置,通过在两端放置不同重量的物体来平衡杠杆。
初中物理杠杆杠杆是一种简单机械,广泛应用于生活和工业中。
初中物理学习中,杠杆是一个重要的概念,本文将介绍杠杆的定义、分类、原理、应用等方面的知识。
一、杠杆的定义与分类杠杆是指由支点、杆和作用力组成的一种简单机械。
根据支点的位置和作用力的方向,杠杆可以分为三类:第一类杠杆、第二类杠杆和第三类杠杆。
第一类杠杆的支点在杆的中间,作用力和负重分别作用在支点的两侧。
例如,撬棍就是一种第一类杠杆。
在使用撬棍时,我们可以利用杠杆的原理,通过施加较小的力来提升较重的物体。
第二类杠杆的支点位于杆的一端,负重位于支点的另一端,作用力作用于负重的同侧。
例如,推门就是一个第二类杠杆。
在推门时,我们可以通过施加较小的力来打开较重的门。
第三类杠杆的支点位于杆的一端,作用力作用于杆的另一端,负重位于支点的同侧。
例如,锤子就是一个第三类杠杆。
在使用锤子时,我们可以通过施加较小的力来给较重的物体带来较大的速度。
二、杠杆的原理杠杆的原理是“杠杆平衡定律”。
即在平衡状态下,杠杆两侧的力矩相等。
力矩是由作用力与支点之间的距离乘积得到的。
因此,通过调整支点、作用力和负重的位置,可以改变杠杆的力矩,从而实现不同的功能。
三、杠杆的应用杠杆广泛应用于生活和工业中。
以下是一些常见的杠杆应用:1.起重机:起重机是一种利用杠杆原理实现重物升降的机器。
通过改变支点位置、作用力和负重的位置,可以实现不同高度的升降。
2.瑞士军刀:瑞士军刀是一种多功能的工具,其中包括了多种杠杆。
例如,撬棍可以用来开启瓶盖,钳子可以用来夹持物体等等。
3.梯子:梯子也是一种利用杠杆原理实现升降的工具。
梯子的支点位于地面,人的重心作为负载,通过调整梯子的角度来升降。
4.剪刀:剪刀是一种利用杠杆原理实现剪切的工具。
剪刀的两个刀片组成了一个第一类杠杆,通过施加较小的力来剪断较大的物体。
5.车轮:车轮也是一种利用杠杆原理的工具。
车轮的轮轴是一个第二类杠杆,通过施加一定的力来实现车轮的旋转。
杠杆的工作原理及应用1. 什么是杠杆杠杆是一种简单的机械工具,由一个刚固定在一点的杆和一个施力点组成。
通过在杠杆上施加力,可以实现放大力的效果,从而在应用中提供机械优势。
杠杆的工作原理是基于力和距离的乘积原理。
2. 杠杆的工作原理杠杆的工作原理可以通过以下公式描述:力1 × 距离1 = 力2 × 距离2其中,力1是施加在杆的一侧的力,距离1是施加力1的点到支点的距离;力2是施加在杆的另一侧的力,距离2是施加力2的点到支点的距离。
通过这个原理,可以改变力和距离的比例,从而实现力的放大或减小。
如果力1的距离更大,那么力2的结果将比力1放大;如果力2的距离更大,那么力2的结果将比力1减小。
3. 杠杆的分类根据杆杆上力的作用方式和支点的位置,杠杆可以分为三种类型: - 第一类杠杆:支点位于杠杆的中间,力作用在支点两侧。
这种杠杆实现力的平衡。
- 第二类杠杆:支点位于杠杆的一端,力作用在支点的另一端。
这种杠杆可以实现力的放大。
- 第三类杠杆:支点位于杠杆的一端,力作用在支点的相同一侧。
这种杠杆可以实现力的减小。
4. 杠杆的应用杠杆广泛应用于各个领域,以下是一些常见的应用场景:4.1 物理学实验在物理学实验中,杠杆经常用于测量力的大小和测量重量。
通过杠杆的原理,可以轻松测量出物体的重量或施加力的大小。
4.2 力学系统在机械系统中,杠杆的应用非常广泛。
例如,起重机、推土机等机械设备都使用杠杆来提供机械优势,从而实现较大的力量输出。
4.3 肌肉运动人体的骨骼系统中也有很多杠杆的应用。
例如,手臂的骨骼系统可以将肌肉施加的力放大,提供更大的力输出。
4.4 工程设计在建筑工程和机械设计中,杠杆原理被广泛应用于设计稳定的结构。
通过合理设计杠杆的比例,可以实现需要的力量平衡和稳定性。
4.5 金融投资在金融领域,杠杆也有着特殊的应用。
投资者可以通过借入资本来放大投资收益,这种放大效应被称为金融杠杆。
然而,金融杠杆也带来了更大的风险和潜在损失。
杠杆中考物理知识点总结一、杠杆的概念和分类1. 杠杆的概念杠杆是一种简单机械,用来传递或改变力的方向、大小和作用点。
在物理学中,杠杆是由一个支点和一根刚性杆组成的,可以用来传递力或改变力的方向和大小。
杠杆可以是固定不动的,也可以是绕着支点旋转的。
2. 杠杆的分类根据支点的位置和作用力的方向,杠杆可以分为三种类型:一类杠杆、二类杠杆和三类杠杆。
一类杠杆:支点在作用力的一侧,力点在支点的另一侧。
二类杠杆:支点在力点的一侧,作用力在支点的另一侧。
三类杠杆:力点和支点都在作用力的一侧。
二、杠杆的应用1. 杠杆的作用杠杆可以用来传递力、改变力的方向和大小,从而达到增加或减少力的效果。
在现实生活中,杠杆被广泛应用于各个领域,如建筑、运输工具、机械设备等。
例如,门锁、开瓶器、水泵等都是利用杠杆原理设计制造的。
2. 杠杆的原理杠杆原理是古代希腊学者阿基米德在《杠杆定理》中总结的。
根据杠杆原理,当一个杠杆在支点附近受到一个作用力时,会产生一个力矩,力矩大小等于作用力与支点之间的距离的乘积。
根据力矩的平衡条件,可以得到杠杆平衡的条件。
三、杠杆的力矩的计算1. 力矩的定义力矩是用来衡量一个力对物体产生转动效果的物理量,通常用符号M表示。
力矩的大小等于力与力臂的乘积,即M=Fr,其中F为作用力大小,r为力臂长度。
2. 力矩的计算计算力矩时,需要考虑力和力臂的相对位置和方向。
根据右手定则,力矩的方向垂直于杠杆的平面,方向由手指指向大拇指的方向确定。
3. 力矩的平衡条件根据力矩的平衡条件,可以得到力矩的平衡方程:ΣM=0。
在杠杆平衡的情况下,支点处的力矩和为零。
根据这个条件,可以计算出未知力的大小和方向,或者支点处的压力大小。
四、杠杆的平衡条件1. 平衡力的条件在一个杠杆系统中,当作用在杠杆两侧的力的力矩平衡时,杠杆就处于平衡状态。
根据力矩的平衡条件ΣM=0,可以得到平衡力的条件。
2. 平衡态的判断当一个杠杆处于平衡状态时,可以判断出作用力的大小和方向。
六年级科学必考知识点杠杆杠杆作为六年级科学的必考知识点之一,是在物理学中经常涉及到的概念。
它是一种简单机械,通过应用力和支点实现增加力量或改变力的方向。
在这篇文章中,我们将深入探讨杠杆的定义、原理以及它在日常生活中的应用。
一、杠杆的定义与分类杠杆是一种简单机械,由横放的杆和支点构成。
根据支点位置与力的相对位置,杠杆可以分为三类:一类杠杆、二类杠杆和三类杠杆。
1. 一类杠杆:支点位于力的中间,例如剪刀、测量杆等。
在一类杠杆中,力的作用点与支点的距离相等,力的方向与支点之间成直线。
2. 二类杠杆:力和支点位于同一侧,但力的作用点在支点的另一侧,例如推门、拧开瓶盖等。
在二类杠杆中,力的方向与支点之间成一个明显的角度,力的作用点在支点的另一侧。
3. 三类杠杆:力和支点位于同一侧,但力的作用点在支点的同侧,例如夹子、钳子等。
在三类杠杆中,力的方向与支点之间成一个明显的角度,力的作用点在支点的同侧。
二、杠杆的原理与公式杠杆原理是基于力矩的平衡关系。
力矩是力对支点的作用力乘以力臂(即力臂与支点间的垂直距离)所得的乘积。
在一个平衡杠杆系统中,使杠杆保持平衡所需的力矩总和为零。
对于一类杠杆和二类杠杆,平衡条件可以用以下公式表示:力1 ×力臂1 = 力2 ×力臂2其中,力1和力2分别为两个作用于杠杆上的力,力臂1和力臂2分别为力1和力2作用点到支点的垂直距离。
三类杠杆的平衡条件稍有不同,可以用以下公式表示:力1 ×力臂1 = 力2 ×力臂2其中,力1和力2分别为两个作用于杠杆上的力,力臂1和力臂2分别为力1和力2作用点到支点的垂直距离。
在三类杠杆中,力1的力臂较短,需要较大的力才能平衡力2。
三、杠杆的应用杠杆在日常生活中随处可见,它在许多工具和设备中都有广泛的应用。
以下是几个常见的杠杆应用:1. 剪刀:剪刀是一种一类杠杆,通过在支点处施加的力将刀刃分开。
我们可以用较小的力将杠杆的两端分开,实现剪纸、剪布等操作。
物理杠杆知识点总结一、定义物理杠杆是指由一个固定支点连接两个物体,通过施加力矩来实现力的放大或改变方向的简单机械装置。
二、杠杆的分类根据支点位置的不同,杠杆可以分为三类:1. 第一类杠杆:支点位于力的作用方向与杠杆长度之间的一侧,如撬棍。
应用中往往用来改变力的方向,实现力的传递。
2. 第二类杠杆:支点位于力的作用方向与杠杆长度之间的另一侧,如剪刀。
应用中可以实现力的放大,但需要施加较小的力。
3. 第三类杠杆:支点位于力的作用方向与杠杆长度之间的同一侧,如手臂。
应用中可以实现速度的放大,但需要施加较大的力。
三、力矩力矩是杠杆原理的重要概念,它可以用来描述力在杠杆上产生的转动效果。
力矩的大小等于力与支点之间的距离乘以力的大小。
四、力矩的平衡条件杠杆在平衡状态下,力矩的和为零。
即:∑τ = 0其中,∑τ表示所有力矩的代数和。
五、力的放大效应杠杆的一个重要应用是实现力的放大效应。
根据杠杆的原理,当支点到力的作用点的距离增大时,施加的力可以减小,但力矩的大小保持不变。
这样可以通过杠杆的作用,用较小的力实现对较大力的控制。
六、杠杆的应用1. 利用杠杆放大力的作用,可以实现物体的举起、移动等操作。
比如梯子、桌子等日常生活中的物品。
2. 杠杆在工程中的应用非常广泛,如起重机、挖掘机等机械设备都利用了杠杆的原理。
3. 杠杆还可以用于测量质量或力的大小,如天平、测力计等。
七、杠杆的局限性尽管杠杆在很多方面有着广泛的应用,但它也有一些局限性:1. 杠杆的放大效应是有限的,不能无限放大力的大小。
2. 杠杆只能改变力的方向、大小或速度,不能改变能量的大小。
八、杠杆的优势尽管杠杆有一些局限性,但它的优势也是不可忽视的:1. 杠杆结构相对简单,制造成本低,易于维护和操作。
2. 杠杆可以通过合理的设计和安排,实现多种功能,具有很高的灵活性和适应性。
九、杠杆原理的应用杠杆原理不仅仅应用于物理学领域,也应用于其他领域,如经济学中的杠杆效应、心理学中的心理杠杆等。
杠杆的原理分类及应用1. 杠杆的定义杠杆是一种力的应用工具,它由一个支点和施力点组成。
通过施加力在支点上,可以产生一个较大的输出力。
2. 杠杆的原理杠杆原理是基于物理学中的力矩原理的。
力矩是一种旋转力,是由施力点到支点的垂直距离乘以施力点施加的力的大小所决定的。
根据力矩的定义,可以得出以下公式:力矩 = 施力点与支点的距离 × 施力点施加的力杠杆的原理则是基于这个公式,通过改变力的大小和力臂的长度,可以改变输出力的大小。
3. 杠杆的分类根据杠杆的结构和应用场景,杠杆可以分为以下几种分类:3.1. 一级杠杆一级杠杆是最简单的杠杆,由一个支点和施力点组成。
当施加的力和力臂的长度相等时,输出力与输入力相等,这是一种平衡状态。
一级杠杆常见的应用包括剪刀、门铃等。
3.2. 二级杠杆二级杠杆由两个支点和施力点组成。
施力点与支点1之间的力臂称为一级力臂,支点1与支点2之间的力臂称为二级力臂。
当一级力臂和二级力臂的长度不相等时,输出力与输入力不相等。
二级杠杆常见的应用包括推拉门、刨子等。
3.3. 多级杠杆多级杠杆由多个支点和施力点组成。
每个支点和施力点之间可以形成不同长度的力臂。
通过改变不同力臂的长度,可以调整输出力的大小。
多级杠杆常见的应用包括手动液压千斤顶、工程起重机等。
3.4. 固定杠杆固定杠杆是指支点固定,不可移动的杠杆。
固定杠杆常被用于平衡物体的重力,实现力的平衡。
常见的固定杠杆应用包括天平、秋千等。
3.5. 移动杠杆移动杠杆是指支点可以移动的杠杆。
通过移动支点的位置,可以改变杠杆的作用效果。
常见的移动杠杆应用包括滑竿传动装置、手动起重机等。
4. 杠杆的应用杠杆的原理被广泛应用于各个领域。
以下是一些常见的杠杆应用:•建筑领域:起重机、千斤顶•机械领域:刨子、剪刀、钳子•交通运输领域:汽车离合器、刹车系统•物理实验:杠杆平衡实验、天平实验•工程学:平衡桥梁设计、推土机设计杠杆的应用不仅能够增加力的效果,还可以提高工作效率。
杠杆分类及应用知识梳理1、杠杆分类(1)由杠杆的平衡条件:F1×L1=F2×L2,按照力臂的不同可分为:当L1____L2时,F1____F2,省力杠杆;当L1____L2时,F1____F2,等臂杠杆;当L1____L2时,F1____F2,费力杠杆。
(2)杠杆的特点及实例名称结构特征特点应用举例____杠杆动力臂大于阻力臂省____、费____ ____________________________________杠杆动力臂小于阻力臂费____、省____ ____________________________________杠杆动力臂等于阻力臂不省力、不费力________________________________2、杠杆实验“探究杠杆平衡条件”实验及实验步骤:(1)将铁架台放在水平桌面上,安装杠杆,调节________使杠杆在________平衡,目的是______________________________________;(2)用弹簧测力计测出____________________________;(3)将不同的钩码个数组成两个钩码组,分别将两个钩码组悬挂在杠杆上支点________侧,调节位置直至杠杆________平衡,测出力和对应的力臂填入表格;(4)保持力臂不变,改变________________,使杠杆重新水平平衡,将对应的力和力臂填入表格;(5)保持力不变,改变________________,使杠杆重新水平平衡,将对应的力和力臂填入表格。
例题解析1、杠杆分类知识点一:省力杠杆【例1】如图是自卸车的示意图,车厢部分视为杠杆,则下列分析正确的是()A.B点是支点,液压杆施的力是动力,货物重是阻力B.B点是支点,物体A放在车厢前部可省力C.C点是支点,物体A放在车厢后部可省力D.C点是支点,物体A放在车厢前部可省力【例2】“给我一个支点和一根足够长的棍,我就能撬起整个地球。
”下列生产和生活中的杠杆与阿基米德设想的杠杆属于同一类型的是()知识点二:费力杠杆【例1】钓鱼时,钓鱼竿可看成一根杠杆,如图所示,它是一个________(省力/费力)杠杆,其支点位于图中的________点。
要使钓起鱼时省力一些,则钓鱼者两只手之间的距离应________(增大/减小)一些。
【例2】下列机械或工具的使用,属于费力杠杆的是()A.羊角锤B.筷子C.开瓶器D.独轮车2、杠杆动态变化知识点一:一个要素变化【例1】如图所示,轻质杠杆OA的B点挂着一个重物,A端用细绳吊在圆环M下,此时OA 恰成水平且A点与圆弧形架PQ的圆心重合,那么当环M从P点逐渐滑至Q点的过程中,绳对A端的拉力大小将()A.保持不变B.逐渐增大C.逐渐减小D.由大变小再变大【例2】如图所示,轻质杠杆可绕O转动,在A点始终受一垂直作用于杠杆的力,在从A转动到A’位置时,力F将()A.变大B.变小C.先变大,后变小D.先变小,后变大知识点二:两个要素变化【例1】如图所示,一根重木棒在水平动力(拉力)F的作用下以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,若动力臂为L,动力与动力臂的乘积为M,则()A.F增大,L增大,M增大B.F增大,L减小,M减小C.F增大,L减小,M增大D.F减小,L增大,M增大【例2】如图所示,F的方向始终竖直向上,在匀速提升重物G的过程中()A.F大小不变B.F逐渐变大C.F逐渐变小D.F先逐渐变小后逐渐变大3、杠杆实验知识点一:探究杠杆平衡条件实验【例1】在“研究杠杆平衡条件”实验中:(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母向________调(填“左”或“右”)。
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向________(填“左”或“右”)移动________格。
(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时加一个相同的钩码,这时杠杆将________。
(填“保持水平平衡”、“顺时针转动”或“逆时针转动”)(4)物理课本中有这样一句话“托盘天平是支点在中间的等臂杠杆,天平平衡时砝码的质量等于被测物体的质量”。
实际上使用托盘天平经常同时用到砝码和游码,此时被测物体的质量应________砝码的质量(填“大于”“小于”或“等于”)。
【例2】在探究杠杆平衡条件的实验中:(1)小丽把杠杆支在支架上,调节杠杆两端的平衡螺母,使杠杆在_______位置平衡。
(2)如图甲,在杠杆的B处挂2个相同的钩码,要使杠杆仍然在水平位置平衡,则在杠杆的A处应该挂_______个同样的钩码。
(3)如图乙,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,杠杆仍然在水平位置平衡,则测力计的拉力F_______(选填“变大”、“变小”、“不变”),原因是___________________________。
1、动力臂小于阻力臂的杠杆是________杠杆;动力臂大于阻力臂的杠杆是________杠杆;动力臂等于阻力臂的杠杆是________杠杆。
(填“省力”“费力”或“等臂”)2、下图例举了一些杠杆原理在生活中的应用,其中属于省力杠杆的是()3、如图所示,是一种指甲刀的结构示意图,下列说法正确的是()A.ABC是一个省力杠杆B.D处刀刃较薄,可以增大压力C.杠杆ABC上有粗糙的花纹,可以减小摩擦D.指甲刀只有两个杠杆,一个省力杠杆,一个费力杠杆4、如图所示,园艺师傅使用剪刀修剪树枝时,常把树枝尽量往剪刀轴O靠近,这样做的目的是为了()A.增大阻力臂,减小动力移动的距离B.减小动力臂,减小动力移动的距离C.增大动力臂,省力D.减小阻力臂,省力随堂检测5、在探究杠杆平衡条件的实验中,先把杠杆架在支架上,通过调节平衡螺母,使杠杆在水平位置平衡。
当左侧钩码处于如图所示的A位置时,应将右侧的钩码向________移动(选填“左”或“右”)_______格(每格长度相同),可使杠杆在水平位置平衡。
6、如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟杆垂直的力F 使直杆由竖直位置慢慢转动到水平位置,在此过程中这个直杆()A.始终是省力杠杆B.始终是费力杠杆C.先是省力杠杆,后是费力杠杆D.先是费力杠杆,后是省力杠杆7、如图所示,O为杠杆的支点,在杠杆的右端B点挂一重物。
MN是以A为圆心的弧形导轨,绳的一端系在杠杆的A点,另一端E可以在弧形导轨上自由滑动。
当绳的E端从导轨的一端N点向另一端M点滑动的过程中,杠杆始终水平,绳AE对杠杆拉力的变化情况()A.先变小,后变大B.先变大,后变小C.一直变小D.一直变大8、如图所示,用水平放置轻质杠杆把重物匀速提升的过程中,力F方向始终跟杠杆垂直,那么力F 的大小()A.先变小再变大B.逐渐变大C.杠杆水平放置时力F最小D.杠杆水平放置时力F最大9、如图是一种拉杆式旅行箱的示意图,使用时相当于一个________(填“省力”或“费力”)杠杆,若箱和物品共重100N,设此时动力臂是阻力臂的5倍,则抬起拉杆的力F为________N。
10、在探究杠杆平衡条件的实验中,保持杠杆在水平位置平衡,就可以直接从杠杆上读出________。
如图所示,在支点左侧20cm刻度处挂3个重均为0.5N的钩码,右侧30cm刻度尺用弹簧测力计沿竖直拉杠杆,使其水平平衡,此时弹簧测力计拉力为________N。
保持弹簧测力计悬挂点不变,使其拉力方向斜向右下方,仍使杠杆水平平衡,弹簧测力计示数变________。
11、如图所示,粗细均匀的直尺AB,将中点O支起来,在B端放一支蜡烛,在AO的中点O′上放两支蜡烛,如果将三支完全相同的蜡烛同时点燃,它们的燃烧速度相同。
那么在蜡烛燃烧的过程中,直尺AB将()A.始终保持平衡B.蜡烛燃烧过程中A端逐渐上升,待两边蜡烛燃烧完了以后,才恢复平衡C.不能保持平衡,A端逐渐下降D.不能保持平衡,B端逐渐下降12、小明用杠杆、一盒钩码和弹簧测力计等器材,做“探究杠杆平衡条件”的实验。
(1)实验开始时,杠杆的位置如图甲所示。
为使杠杆在水平位置平衡,应将右端的平衡螺母向________移动;或将左端的平衡螺母向________移动(选填“左”或“右”)。
(2)小明调节杠杆水平平衡后,在杠杆左侧挂2个钩码,图乙所示。
要使杠杆水平平衡,应在A 处挂________个钩码。
(3)小明再次在杠杆的两端挂上钩码,杠杆的状态如图丙所示。
小明又调节平衡螺母,使杠杆恢复水平平衡。
然后记录下动力、阻力、动力臂和阻力臂的数值。
他分析实验数据时,发现得不到正确的“杠杆的平衡条件”,其原因是:____________________。
(4)当弹簧测力计由竖直向上拉杠杆变成斜向上拉,如图丁所示。
若杠杆仍在水平位置静止,则弹簧测力计的示数一定________(选填“变大”、“不变”或“变小”)。
13、将重为5N和15N的甲、乙两物体分别挂在杠杆的左、右两端,若杠杆的重力忽略不计,当杠杆平衡时,左、右两力臂长之比为()A.3:1 B.2:1 C.1:3 D.4:114、一根长2.2m的粗细不均匀的木料,一端放在地面上,抬起它的粗端要用680N的力;若粗端放在地上,抬起它的另一端时需要用420N的力,求:(1)木料重多少?(2)木料重心的位置。
课后作业1、杠杆有三类,即省力杠杆、费力杠杆和等臂杠杆。
在撬棒、天平、铡刀、扳手、酒瓶起子、理发剪刀、钓鱼竿等常见杠杆中,属于省力杠杆的有_____________________________________________;属于费力杠杆的有_________________________,属于等臂杠杆的有_______________。
2、如图,O为支点,在A端施加一个力使杠杆在水平位置平衡,则这个杠杆为()A.一定省力B.一定费力C.不省力也不费力D.都有可能3、列车上有出售食品的手推车(如图所示)。
若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是(写出字母);当后轮遇到障碍物A时,售货员向上提扶把,这时支点是________,手推车可以视为________力杠杆。
4、如图所示,杠杆上有两个质量不等的球m1>m2,杠杆在水平位置平衡,杠杆自重不计。
如果两球以相同的速度向支点运动,则杠杆()A.仍能平衡B.不能平衡,左侧将下沉C.不能平衡,右侧将下沉D.条件不够,无法判断5、李彬在“探究——杠杆平衡的条件”时,使用的杠杆如图所示:(1)实验前,应先调节杠杆两端的螺母,使杠杆在________位置平衡;(2)如果在杠杆的A处挂三个相同的钩码,则在B处要挂________个同样的钩码,杠杆才能仍然保持在水平位置平衡;(3)如果在杠杆的C处挂总重1.5N的钩码,用弹簧测力计作用在B处,要使杠杆在水平位置平衡,且弹簧测力计的示数最小为________N,应________拉弹簧测力计。