全站仪数字测图在城市测量中的误差估计
- 格式:doc
- 大小:79.00 KB
- 文档页数:4
探究不同测绘方法在地形测量的误差及消除措施摘要:随着经济的不断发展,人们的生活水平得到了显著的提升,当道路建设、房屋建设以及城市建设的不断发展,使得测绘工作的意义显得尤为重要,现如今,测绘工作已经形成了几种较为成熟的方法,本文通过几种测绘方法过程的介绍,分析在测绘中存在的问题和相应解决的方式,与此同时,还对实际业务中可能遇到的问题和解决问题采用的措施进行了研究和探索。
关键词:地形测绘;方法;问题;措施;目前,测绘工作被广泛的运用在城市工程建设中,测绘工作在一定的程度上推动了城市的发展,并在其中起了非常重要的作用。
不同环境中使用的测绘方法不同。
随着科技的不断发展,测绘方法也随之被研究出来后广泛使用在工程中的各个角落,这些被研究出来的测绘方法在一定程度上解决了测绘过程中出现的问题,但是因为自身的特殊性,使得其精确度非常的重要,当前,测绘中可以避免的只有测绘错误,测绘误差是没有办法避免的,唯一降低误差的方法就是将误差消除到所规定的范围内,由此来避免因误差而带来的影响。
1、测绘概述1.1测绘含义一般的测绘是指全球卫星导航定位系统、地理信息系统,它是以遥感为技术核心的一种新型技术,测绘技术不单单只是这样,它还与计算机技术、光电技术、空间通讯技术等相结合,把地面上出现的特点和界线经过测量来得到地面的图形和位置信息。
除此之外,测绘也可以使用在工程测绘上面,主要是对工程建设和行政管理上面进行的一些措施,它可以对地理信息进行收集,并且对其进行绘制。
1.2、测绘使用的必要性对于工程建设而言,在工程建设的过程中,测绘工作给各个程度上的工程建设提供了非常多信息资料,这些信息资料和地形图时开展工程设计和施工提供资源。
对于行政管理而言,在形成管理的过程中,可以将地图、汽车导航使用的地图等进行测绘收集和绘制,在一定程度上节约了成本和时间。
2、测绘方法及误差消除的方法测绘误差可以分为三种,其中包含了系统误差、随机误差以及粗差,通过多年的研究和探讨,将这三类误差的消除策略研究了出来。
城市规划测量中的精度评估与误差分析方法城市规划测量对于城市发展和建设具有重要的意义,为了保证测量数据的准确性和可靠性,我们需要进行精度评估和误差分析。
本文将介绍城市规划测量中常用的精度评估与误差分析方法。
一、精度评估方法1. 精度评估的概念和意义精度评估是指对测量数据的准确性进行评定和估计的过程。
城市规划测量的数据主要用于制图、量化分析和设计等工作,而这些工作的准确性和可靠性直接影响城市规划的效果。
因此,精度评估是城市规划测量中必不可少的环节。
2. 误差度量方法误差度量是精度评估的基础,它用于衡量测量数据与真实值之间的差异。
常用的误差度量方法包括绝对误差、相对误差和均方根误差等。
绝对误差是指测量值与真实值之间的差异,可以通过简单的减法计算得出。
相对误差是指绝对误差与真实值之比,用百分比表示。
相对误差能够更直观地反映测量值与真实值之间的差异。
均方根误差是评价一组数据整体误差大小的指标,它能够考虑所有数据点的误差,并将其平方求和后开根号。
3. 精度评估指标除了误差度量,还有一些其他的精度评估指标用于衡量整体的测量准确性。
常用的精度评估指标包括精度等级和置信区间等。
精度等级是用于评估测量数据的准确性和可靠性的一个指标。
常见的精度等级包括一级精度、二级精度和三级精度等。
置信区间是用于表示测量结果的不确定性的一个范围。
置信区间可以通过统计学方法计算得出,可以提供测量结果的可靠性信息。
二、误差分析方法1. 误差来源分析在城市规划测量中,误差的来源非常丰富,包括仪器误差、人为误差、环境因素等。
误差来源分析是识别出误差的原因和影响因素,从而采取相应的措施进行修正和改进。
仪器误差是由测量仪器本身的精度和稳定性引起的。
在测量过程中,我们需要选择合适的仪器,并进行仪器校准和检验,以保证测量结果的准确性。
人为误差是由测量人员的技术水平和操作不当引起的。
因此,在城市规划测量中,需要对测量人员进行专业培训和指导,提高其技术水平和操作能力。
全站仪测量误差分析随着新仪器新设备的不断出现,测量技术的不断提高,同时对工程质量的要求也是愈来愈高,这就对精度的要求加强了许多,随着全站仪在施工放样中的广泛应用,为了使全站仪在实际生产中更好地运用,现结合工程测量理论,对全站仪在测量放样中的误差及其注意事项进行分析。
在我们建筑施工测量中,全站仪主要是用于测量坐标点位的控制和高程的控制,在以下几个方面对全站仪放样的误差作简要概述。
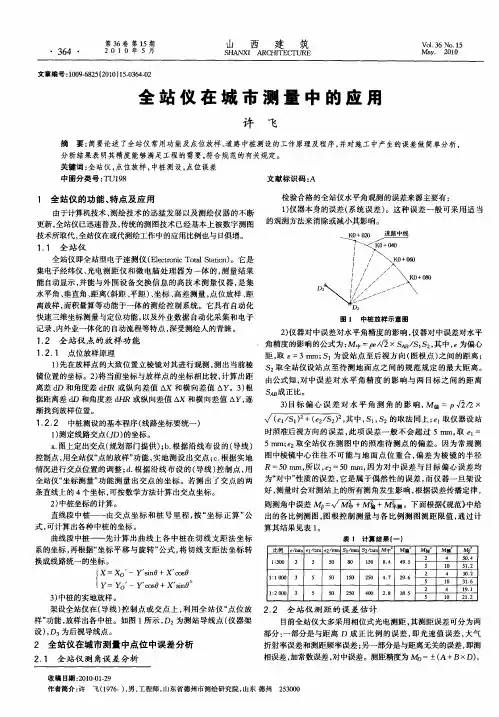
1、全站仪在施工放样中坐标点的误差分析全站仪极坐标法放样点点位中误差MP由测距边边长S(m)、测距中误差ms(m)、水平角中误差mβ(″)和常数ρ=206265″共同构成,其精度估算公式为:而水平角中误差mβ(″)包含了仪器整平对中误差、目标偏心误差、照准误差、仪器本身的测角精度以及外界的影响等。
式(3)表明,对固定的仪器设备,采用相同的方法放样时,误差相等的点分布在一个圆周上,圆心为测站O。
因此对每一个放样控制点O,可以根据点位放样精度m计算圆半径S,在半径范围内的放样点都可由此控制点放样。
由式(1)可看出,放样点位误差中,测距误差较小,主要是测角误差。
因此,操作中应时时注意提高测角精度。
2、全站仪在控制三角高程上的误差分析一般情况下,在测量高程时方法为:设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA±HAB得到B点的高程HB。
当A、B两点距离较短时,用上述方法较为合适。
在较长距离测量时要考虑地球曲率和大气折光对高差的影响。
设仪器高为i,棱镜高度为l,测得两点间的斜距为S,竖直角α,则AB两点的高差为:一般情况下,当两点距离大于400m时须考虑地球曲率及大气折光的影响,在高差计算时需加两差改正。
式中R为地球曲率半径,取6371km, k为大气折光差系数,k=1-2RC (C为球气差,C=0.43D2/R,D:两点间水平距离)。
从上式中可以看出,当距离较远时,影响高差精度的主要因素就是地球曲率及大气折光,如果高程传递次数较多,累计误差就会加大,在测量时,最好是一次传递高程,若有需要,往返测高程,取其平均值以减小误差。
利用全站仪对数字化测图进行误差精度分析(精)利用全站仪对数字化测图进行误差精度分析摘要:文中首先阐述了数字化测图的作业过程,然后分析了全站仪在数字测图中的误差来源,最后讨论了各项误差对测图精度的影响。
关键词:全站仪数字化测图精度分析目前,随着电子科学技术和计算机的发展,全站仪及光电测距仪的普及,与传统的白纸测图方法相比,数字化测图以其测图精度高、数据采集快,劳动强度低,产品的使用与维护方便、快捷、利用率高等优点被广泛用于测绘生产、土地管理、城市规划等部门,并为广大用户所接受。
数字化测图的采集数据及成图过程见图1。
文中拟就全站仪数字化测图的地形图平面位置精度与高程精度进行分析,以便使全站仪数字化测图有章可循。
图1 数字测图系统框图1 测量碎部点平面误差来源及精度分析全站仪数字化测图的平面误差来源主要有:望远镜照准误差、读数误差、仪器误差、目标偏心误差和外界条件的影响。
其中目标偏心误差和人为操作误差不容忽视。
(1)望远镜照准误差:该误差与望远镜放大倍率有关,取V=30,则(2)读数误差:使用全站仪作业,多次重复读数误差一般超过,故取。
(3)仪器误差:全站仪由于结构合理,仪器整平精度高,还有倾斜自动补偿功能,从全站仪鉴定资料上看,一般仪器误差,故取。
(4)目标偏心误差:即由于棱镜杆偏心引起的测角误差,这里取偏心误差为,则有(S为测距长度,。
(5)测站偏心误差:采用光学对点器对中,测站偏心不超过,则由此引起的测角误差为:。
(6)外界条件的影响:主要是温度变化对视准轴的影响,据资料介绍,温度变化1℃,测角误差变化在之间。
故取。
综合上述影响,半测回方向中误差。
为便于后面精度估算,这里假设定向边与测碎部点边边长相同,则半测回测角中误差为,定向边与测碎部点边长相差很大时对测角中误差影响很大,现以定向边边长100m为例,推求不同的测点边长所引起的碎部点点位中误差,如表l。
2 全站仪三角高程测量误差来源及精度分析全站仪测量点位高程采用三角高程测量的方法,高差计算公式为:由公式知,点位高程的误差来源主要有:测距误差、测角误差、量测仪器高和目标高误差以及球气差影响。
全站仪在施工测量放样中的误差及其注意事项摘要:随着社会经济和科学技术不断发展,测绘技术水平也相应地得到了迅速提高。
测绘作业手段也有了一个质的飞越,测绘仪器设备由过去的光学经纬仪,逐渐地过渡到半站仪,接着又推出了全站仪,随着仪器设备不断地创新,测绘野外作业的劳动强度逐渐减轻,工作效率不断得到提高.本论文对全站仪在施工中放样精度进行了探讨。
关键词:全站仪;放样;估计精度目前,随着科学技术的发展,全站仪已经相当普及而且不断向智能化方向发展,全站仪以其高度自动化和准确快捷的定位功能在目前工程测量中广泛应用。
许多新技术运用到全站仪的制造和使用当中,如无反射棱镜测距、目标自动识别与瞄准、动态目标自动跟踪、无线遥控、用户编程、联机控制等。
为了使全站仪在实际生产中更好地运用,现结合工程测量理论,对全站仪在施工测量放样中的误差及其注意事项进行探讨。
1仪器精度的选择为了能够满足施工中测量精度,应该严格按照有关规范和设计技术文件规mβ/(ρ)≈mS/S或mγ/ρ≈ms/S式中mβ、mγ为相应等级控制网的测角中误差、方向中误差,(″);ms为测距中误差,m;S为测距边长,m;ρ为常数,ρ=206265″。
例如:使用的测距仪标称精度为±(5mm+5×10-6S),平均测距长度S为按500m计,按照精度匹配原则有:mγ=ms/S×ρ=5P500000×206265=2″,因此,当使用的测距仪标称精度为±(5mm+5×10-6S)时,应选用测角精度为2″级经纬仪。
2全站仪在施工放样中坐标点的精度估算全站仪极坐标法放样点点位中误差MP由测距边边长S(m)、测距中误差ms(m)、水平角中误差mβ(″)和常数ρ=206265″共同构成,其精度估算公式为:Mp=±……………………………………。
(1)而水平角中误差mβ(″)包含了仪器整平对中误差、目标偏心误差、照准误差、仪器本身的测角精度以及外界的影响等。
全站仪坐标误差的计算方法1. 引言全站仪是一种用于测量和记录地球上某一点的三维位置和方位角的仪器。
然而,由于各种因素的影响,全站仪测量结果中常常会存在一定的误差。
因此,准确计算全站仪测量数据的坐标误差非常重要。
本文将介绍全站仪坐标误差的计算方法。
2. 全站仪坐标误差的来源全站仪坐标误差主要来源于以下几个方面:2.1 观测误差观测误差是由于各种因素引起的测量值与真值之间的差异。
包括仪器仪表的本身精度、环境条件如温度、大气压力等以及人为因素等。
2.2 测站条件误差测站条件误差是指由于测站条件的限制而引起的全站仪测量误差。
例如,测站地点过于狭小、比较高的建筑物、各种障碍物等。
2.3 地球条件误差地球条件误差是指由于地球自身性质的限制所引起的误差。
例如,地球表面的不规则性、重力异常、大地水平度等。
3. 坐标误差的计算方法根据上述全站仪坐标误差的来源,坐标误差可以通过以下步骤计算得出:3.1 数据采集在进行坐标误差计算之前,首先需要进行多个测量点的数据采集。
在采集数据时,应注意尽量消除或减小各种误差来源的影响,以获得更准确的数据。
3.2 数据处理在数据处理过程中,需要进行各种数据的校核、筛选和平滑操作,以获得可靠和准确的数据。
3.3 误差分析根据采集到的数据,进行误差分析。
首先,对每个测量点的各个参数进行计算和分析,包括水平角、垂直角和斜距等。
然后,根据误差来源的分类,对误差进行分类和分析。
3.4 误差求和将各个来源的误差按照一定的规则进行求和,得出总的误差值。
3.5 误差评估通过误差评估,可以判断全站仪的测量结果是否具有可靠性。
根据误差评估的结果,可以对全站仪进行校准或调整,以提高测量结果的准确性。
4. 结论全站仪坐标误差的计算对于测量结果的可靠性和准确性具有重要意义。
通过数据采集、数据处理、误差分析、误差求和和误差评估等步骤,可以得出合理和准确的坐标误差值。
在实际工程测量中,应充分考虑各种误差来源,并采取相应的措施,以减小仪器误差,提高测量结果的精度。
全站仪在测量中的误差分析x松-------- 兰渝铁路LY12标摘要:1»看社会经济和科学技术不斷发展調绘技术水平也相应地得到了迅速提高•测董放样仪窗的更新大幅度的提高了放样箱度,根据全站仪的工作原理,分析全站仪坐标放样碾差产生的原因及其改正方法,以此提高测M度, 保证理质量.关M:全站仪、荊度、放样、現差伴着十二五时期经济发展的指导思想,铁路、髙速公路建设在我国迅速发展,同时对工程质量的要求也是愈来愈高,这就对精度的要求加强了许多,随着全站仪在施工放样中的广泛应用,为了便全站仪在实际生产中更好地运用,现结合工程测量理论,对全站仪在测量放样中的误差及其注意事项进行分析。
在我们分部桥梁施工测量中,全站仪主要是用干测量坐标点位的控制和髙程的控制,在以下几个方面对全站仪放样的误差作简要概述。
1、全站仪在施工放样中坐标点的误差分析全站仪极坐标法放样点点位中误差M P由测距边边长S(m)、测距中误差m』m)、水平角中误差皿贸")和常数p=206265"共同构成,其精度估算公式为:M P = ±Vm z2 + (Smp/p) 2(1)而水平角中误差mJ")包含了仪器整平对中误差、目标偏心误差、照准误差、仪器本身的测角精度以及外界的影响等。
由式⑴可得S2=[(M P2-m c2)Xp2]/m p2(2)又有S2=(X O-X A)2+(Y O-Y A)2所以有(Xo-Xj^fYo-YAl^fMp^m^j/fmp/p)2 (3)式(3)表明,对固定的仪器设备,采用相同的方法放样时,误差相等的点分布在一个圆周上,圆心为测站O。
因此对每一个放样控制点O,可以根据点位放样精度m计算圆半径S,在半径X围内的放样点都可由此控制点放样。
由式(1)可看出,放样点位误差中,测距误差较小,主要是测角误差。
因此,操作中应时时注意提商测角精度。
2、全站仪在控制三角髙程上的误差分析一般情况下,在测量高程时方法为:设A,B为地面上高度不同的两点。
全站仪的使用方法与测量误差分析全站仪是一种用于测量地理空间坐标和方位角的高精度仪器,广泛应用于土木工程、建筑设计、测绘等领域。
本文将介绍全站仪的使用方法,并分析其中可能产生的测量误差。
一、全站仪的使用方法1.设置基准点在使用全站仪之前,首先需要设立基准点。
基准点通常是已知坐标的标志物或者特定位置,可以通过GPS定位等方式获得其精确坐标。
在测量过程中,全站仪将基准点作为参考,用于确定其他测点的坐标。
2.安装全站仪将全站仪放置在一个平稳的三脚架上,并平稳地旋转到观测点位的方向。
确保全站仪的水平仪在水平位置,外接电源和电缆也需要正确连接。
3.测量角度和距离使用全站仪进行测量时,首先需要测量观测点位之间的角度。
在目标点位上放置一个反射器或者棱镜,并使用全站仪测量该点位与基准点之间的水平角度、垂直角度和斜距。
4.记录数据使用全站仪进行测量后,需要将测得的角度和距离数据记录下来。
现代的全站仪通常配备了内置存储设备和数据传输功能,可以方便地记录和传输数据。
在记录数据时,应将测量点位的名称、测量时间等相关信息一并记录下来。
5.计算坐标和角度将测得的角度和距离数据输入到相应的软件中,可以通过三角测量原理计算出测量点位的坐标和方位角。
二、全站仪测量误差分析1.观测误差全站仪测量过程中存在着观测误差,其来源主要包括仪器本身的系统误差和操作人员的操作误差。
仪器系统误差包括仪器刻度误差和随机误差等,而操作误差主要包括观测者对测量点位的准确定位误差和读数误差。
2.环境误差全站仪的测量精度受到环境因素的影响,例如大气折射、温度、湿度等因素会引起测量误差。
这些误差可以通过仪器内置的大气压力、温度和湿度传感器进行校正,提高测量精度。
3.误差传递全站仪测量过程中的误差可能会通过计算和传递,导致最终得到的测量结果产生误差累积。
例如,在三角测量计算坐标时,若一个点位的观测误差传递到下一个点位,再传递到后续点位,就会导致最终的测量结果与真实值存在一定的偏差。
全站仪数字测图在城市测量中的误差估计随着现代高新技术的发展与运用,促使测绘工作正从传统的测绘技术手段向现代数字测绘过渡,全站仪在现代测绘工作中的应用比例也越来越大。
因此,有必要对全站仪在使用过程中的误差产生及大小做分析。
全站仪是全站型电子速测仪的简称,它集电子经纬仪、光电测距仪和微电脑处理器于一体,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。
本文分别对这两项误差在城市测量中的大小进行分析,然后综合两方面的影响对地面点的点位误差进行分析与估算。
最后单独分析全站仪的高程误差。
一、全站仪测图点位中误差分析1、全站仪测角误差分析检验合格的全站仪水平角观测的误差来源主要有:①仪器本身的误差〔系统误差〕。
这种误差一般可采用适当的观测方法来消除或减低其影响,但在全站仪测图中对角度的观测都是半测回,因此,这里还是要考虑其对测角精度的影响。
分析仪器本身误差的主要依据是其厂家对仪器的标,由误差传播定律知,野外一测回测角中称精度,即野外一测回方向中误差M标误差M1测=M标,野外半测回测角中误差M半测=M1测=2M标。
②仪器对中误差对水平角精度的影响,仪器对中误差对水平角精度的影响在《测量学》教材中有很详细的分析其公式为M=ρe/×S AB/S1S2其中e为偏心中距,熟练的仪器操作人员在工作中的对中偏心距一般不会超过3mm,这里取e= 3mm。
S1在这里取全站仪测图时的设站点〔图根点〕至后视方向是〔另一通视图根点〕之间的距离,S2取全站仪设站点至待测地面点之间的标准限制的最大距离。
由公式知,对中误差对水平角精度的影响与两目标之间的距离S AB成正比,即水平角在180时影响最大,在本文讨论中只考虑其最大影响。
③目标偏心误差对水平角测角的影响,《测量学》教材推导出的化式为m偏=ρ/2×√(e1/S1)2+(e2/S2)2,S1、S2的取法与对中误差中的取法相同,e1取仪器设站时照准后视方向的误差,此项误差一般不会超过5mm,取e1=5mm,e2取全站仪在测图中的照准待测点的偏差。
全站仪测量坐标允许误差多少全站仪是一种常用于测量地理坐标和地形地貌的高精度测量仪器,其精度直接影响着测量结果的准确性。
在使用全站仪进行测量时,由于各种外部因素的影响,测量坐标可能会存在一定的误差。
那么,在实际测量工程中,我们对全站仪测量坐标的允许误差应该是多少呢?全站仪测量原理在了解允许误差的范围之前,首先需要了解全站仪的测量原理。
全站仪通过测量光束的角度和距离,确定目标点在三维空间中的坐标位置。
具体而言,全站仪利用一个旋转的激光束来测量目标点与全站仪之间的角度,然后通过测量仪器与目标点之间的距离,来计算出目标点的三维坐标。
在实际测量过程中,全站仪通常会进行多次观测,然后基于这些观测数据进行平均计算,以提高测量结果的准确性。
坐标允许误差的定义全站仪的测量结果是三维坐标,通常由东、北、高三个方向的坐标分量表示。
在进行工程测量时,我们通常会设定坐标的允许误差,以评估测量结果的准确性。
坐标允许误差通常由两个参数来定义:水平误差和垂直误差。
水平误差是指目标点在水平方向的偏差,而垂直误差则是指目标点在垂直方向上的偏差。
这两个参数一般使用长度单位(如毫米或厘米)表示。
允许误差的确定方法确定全站仪测量坐标的允许误差是一个复杂的问题,涉及到多个因素。
以下是一些常用的方法来确定允许误差的范围:工程要求首先,我们需要参考具体测量工程所要求的精度和精确度,来确定允许误差的范围。
不同的工程项目可能对坐标测量的精度有不同的要求,因此需要根据具体情况来确定。
测量仪器的精度全站仪作为测量工具,其精度直接影响最终的测量结果。
因此,在确定允许误差的范围时,需要考虑所使用的全站仪的精度。
一般来说,全站仪的精度可以在其技术规格书或使用手册中找到。
控制点的精度在进行全站仪测量时,我们通常需要选择一些已知坐标的控制点,以提高测量的准确性。
控制点的精度也会影响允许误差的确定。
通常情况下,控制点的精度应该比测量点的要求精度要高。
外部环境因素全站仪的测量精度还受到外部环境因素的影响,如温度、大气压力等。
全站仪在数字测图中的误差来源摘要:随着空间技术的成熟,测绘技术手段向信息化测绘阶段过渡,遥感与动态GPS(RTK)在测量工作中的运用也越来越多。
但不可忽视的是,全站仪因其操作简单、全数字显示、双轴补偿和数据传输等优点,与RTK相比具有购置费用低、效费比高等特点,仍然是测绘工作中广泛采用的仪器。
为了充分,合理地发挥它的作用,在了解其性能,使用方法的基础上,也应了解其本身所带来的测量误差大小,这对我们在工作中选择,操作仪器方面是有所帮助的,本文对全站仪测量过程中产生的误差作以估算、分析。
关键词:全站仪;误差;测量Abstract: with the space technology maturity, surveying and mapping technology to surveying and mapping phase transition information, remote sensing and dynamic GPS (RTK) in the use of the measurement work more and more. But important, tachometer because of its simple operation, and the digital display, dual axle compensation and data transmission and other advantages, compared with RTK with purchase expenses low, cost-effectiveness than higher characteristic, is still widely used in surveying and mapping work the instrument. In order to fully, reasonably play its role in know its performance, based on the method of use, also should understand its itself brings the measurement error size, this to our work in options, and operating instruments is the help, this paper by using produces in the process of the measurement error in the estimation, the analysis.Keywords: tachometer; Error; measurement前言:全站仪又称全站型电子速测仪,是一种兼有电子测距、电子测角、计算和数据自动记录及传输功能的自动化、数字化的三维坐标测量与定位系统,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。
全站仪在城市地形测量中的精度分析与提升随着城市建设的不断发展,精准的地形测量数据成为各个领域的重要需求。
全站仪作为现代测量仪器中的重要一员,其在城市地形测量中的应用也日益广泛。
然而,全站仪的测量精度直接影响着测量结果的准确性和可靠性,因此对其精度进行分析和提升是非常关键的。
一、全站仪的工作原理和误差来源全站仪是一种综合测量仪器,它不仅可以测量水平角和垂直角,还可以测量距离和高差,并且具备数据记录和处理的功能。
其主要由望远镜、水平仪、垂直仪、测距仪和计算机等组成。
全站仪通过测量射线的水平角和垂直角以及距离,通过计算得出点的坐标信息。
全站仪的误差来源主要包括仪器误差、环境误差和观测误差。
其中,仪器误差是指仪器本身的偏差,例如水平仪的气泡不准确、垂直仪的非垂直误差、测距仪的非线性误差等。
环境误差是指外部环境对测量结果的影响,例如大气折射误差、温度变化引起的仪器膨胀等。
观测误差是由于操作人员技术不熟练、测量过程中的不稳定因素等引起的误差。
二、全站仪精度分析与提升策略1. 仪器校准和调试全站仪在使用之前需要进行校准和调试,以保证仪器的准确性和稳定性。
校准和调试的主要内容包括准确标定水平仪、垂直仪,检查测距仪的非线性误差,并进行相应的校正。
此外,还需要定期对全站仪进行调试,确保其各项功能正常。
2. 环境控制与影响降低在城市地形测量中,环境因素对全站仪的影响是不可忽视的。
为了提高测量精度,需要尽量控制和降低环境因素的影响。
例如,在测量过程中注意避免大气折射误差,选择合适的测量时间,尽量避免温度变化引起的仪器膨胀等。
3. 观测技巧与操作规范观测技巧和操作规范是保证测量精度的重要因素。
操作人员应具备一定的测量技术和操作经验,能够熟练掌握全站仪的使用方法。
同时,在测量过程中要注意稳定性,避免因不稳定因素导致的误差。
4. 数据处理与精度评定全站仪测量完成后,还需要对测量数据进行处理和评定精度。
数据处理主要包括数据平差、观测值的验证和异常值处理等。
全站仪器坐标测量误差引言全站仪是一种广泛应用于测量工程和建筑行业中的高精度测量仪器。
它采用了角度、距离和高度的测量功能,可以用于测量土地、建筑物、道路以及其他工程结构的坐标信息。
然而,在测量过程中,全站仪器的坐标测量误差是一个不可避免的问题,因为它会直接影响测量结果的准确性和可靠性。
本文将介绍全站仪器坐标测量误差的原因和影响因素,并探讨一些减小误差的方法。
原因和影响因素1. 仪器精度全站仪器的设计制造精度直接影响着其坐标测量的准确性。
制造商通常会在全站仪的技术规格中指定其测量精度。
例如,一个典型的全站仪可能在理想条件下具有1毫米的距离测量精度和1秒的角度测量精度。
然而,在实际使用中,仪器的精度可能会受到环境影响、长期使用引起的磨损以及操作员技术水平等因素的影响。
2. 环境条件全站仪在特定的环境条件下进行测量。
例如,气温、大气压力、湿度等环境因素都会对测量结果产生影响。
气温的变化可以导致测距仪器内部各组件的热膨胀,从而引起测量误差。
大气压力和湿度的变化则会影响测量光线的传播速度和折射率,进而影响角度测量的准确性。
3. 地面条件地面的平整度和稳定性也会对全站仪的测量结果造成影响。
如果地面不平坦或不稳定,全站仪在进行测量时可能会出现震动,导致测量误差。
此外,地面形态的变化也会影响测距仪器的高度测量。
4. 操作员技术水平操作者的技术水平同样对全站仪坐标测量的准确性有很大影响。
技术熟练的操作员能够正确使用仪器并遵循正确的测量程序,从而降低测量误差。
另一方面,对于技术水平较低的操作员而言,可能会出现操作不当、读取不准确或操作疏忽等问题,导致测量误差的增加。
减小误差的方法1. 定期维护和校准定期对全站仪进行维护和校准是减小误差的重要手段。
维护和校准包括清洁仪器、校正零位、调整仪器参数等操作。
维护的目的是确保仪器的正常工作状态,校准则是校正仪器的误差,使其回到准确的状态。
2. 操控仪器的稳定性在测量过程中,操作员应该注意保持仪器的稳定性。
全站仪坐标测量误差范围简介全站仪是测量工程中常用的高精度测量仪器,广泛应用于土木工程、建筑工程、道路工程等领域中的测量和定位任务中。
然而,由于各种环境和操作因素的影响,全站仪的测量结果可能会存在一定的误差。
本文将重点探讨全站仪坐标测量误差的范围及其与测量因素之间的关系。
全站仪坐标测量误差的定义全站仪坐标测量误差是指实际测量值与真实值之间的差异。
由于各种因素的影响,全站仪测量结果可能会产生随机误差和系统误差。
随机误差是由于测量仪器的精度、环境变化以及操作技巧不稳定等因素造成的,其大小和方向都是随机的;系统误差则是由于测量仪器的固有偏差、标定不准确等因素引起的,其大小和方向是固定的。
测量误差的来源全站仪坐标测量误差的来源主要包括以下几个方面:1. 仪器因素全站仪的精度和稳定性对于测量结果的准确性起着重要的作用。
好的全站仪具有更高的测量精度、温度和湿度变化对其影响较小等特点,从而减小了测量误差的范围。
2. 环境因素环境因素包括温度、湿度、大气压力等。
因为全站仪使用光学测量原理,光的传播速度和光线的折射率会受到环境的影响,从而影响测量结果的精度。
3. 操作因素操作人员的技术水平、操作规范和经验对全站仪测量结果也有一定的影响。
误差可能由于操作不当、测量姿势不准确、目标点标志不明确等因素而产生。
全站仪坐标测量误差范围的评估为了评估全站仪坐标测量误差的范围,通常可以采用以下几种方法:1. 标准参考点法选取若干个已知坐标的点作为标准参考点,然后使用全站仪测量这些点的坐标,并与已知坐标进行比较。
通过比较得到的测量结果与真实值的差异,可以评估全站仪的测量误差范围。
2. 内部检查法在同一测量任务中,选择相邻的几个测量点进行重复测量,并比较不同时刻得到的测量结果。
如果测量结果的变化在一定范围内,那么可以认为测量误差控制在合理范围内。
3. 外部检查法通过与其他测量仪器(如GPS测量仪)进行比较,对全站仪的测量结果进行验证。
全站仪数字测图在城市测量中的误差估计
随着现代高新技术的发展与运用,促使测绘工作正从传统的测绘技术手段向现代数字测绘
过渡,全站仪在现代测绘工作中的应用比例也越来越大。
因此,有必要对全站仪在使用过程
中的误差产生及大小做分析
全站仪是全站型电子速测仪的简称,它集电子经纬仪、光电测距仪和微电脑处理器于一
体,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。
本文分别对这两项误
差在城市测量中的大小进行分析,然后综合两方面的影响对地面点的点位误差进行分析与估
算。
最后单独分析全站仪的高程误差。
一、全站仪测图点位中误差分析
1、全站仪测角误差分析检验合格的全站仪水平角观测的误差来源主要有:①仪器本身的误差(系统误差)。
这种误差一般可采用适当的观测方法来消除或减低其影响,但在全站仪测图中对角度的观测都是半测回,因此,这里还是要考虑其对测角精度的影响。
分析仪器本身误差的主要依据是其厂家对仪器的标称精度,即野外一测回方向中误差M标,由误差传播定律知,野外一测回测角中误差M1测=M标,野外半测回测角中误差M半测= M1测=2M标。
②仪器对中误差对水平角精度的影响,仪器对中误差对水平角精度的影响在《测量学》教材中有很详细的分析其公式为M中=ρe/×SAB/S1S2其中e为偏心距,熟练的仪器操作人员在工作中的对中偏心距一般不会超过3mm,这里取e=3mm。
S1在这里取全站仪测图时的设站点(图根点)至后视方向是(另一通视图根点)之间的距离,S2取全站仪设站点至待测地面点之间的规范限制的最大距离。
由公式知,对中误差对水平角精度的影响与两目标之间的距离SAB成正比,即水平角在180时影响最大,在本文讨论中只考虑其最大影响。
③目标偏心误差对水平角测角的影响,《测量学》教材推导出的化式为m偏=ρ/2×√(e1/S1)2+(e2/S2)2,S1、S2的取法与对中误差中的取法相同,e1取仪器设站时照准后视方向的误差,此项误差一般不会超过5mm,取e1=5mm,e2取全站仪在测图中的照准待测点的偏差。
因为常规测图中棱镜中心往往不可能与地面点位重合,偏差为棱镜的半径R=50mm,固取e2=50mm因为对中误差与目标偏心误差均为“对中”性质的误差,就对中本身而言,它是偶然性的误差,而仪器一旦安置完毕,测它们就会同仪器本身误差一样同时对测站上的所有测角发生影响,根据误差传播定律,则测角中误差Mβ=。
下面就以上分析,根据《城市测量规范》中给出的各比例测图,图根控制测量与各比例测图测距限值,通过计算得出下表:
比例emm e1mm e2mm S1mm S2mm M中M偏"M标"M测"Mβ"
2 4 50.4 1:500
3 5 50 80 150 8.
4 49.5
5 10 51.2
2 4 30.2 1:1000
3 5 50 150 250 4.7 29.6
5 10 31.
6 1:2000 3 5 50 250 400 2.8 18.5 2 4 19.1
5 10 21.2
2、全站仪测距的误差估计目前全站仪大多采用相位式光电测距,其测距误差可分为两部分:一部分是与距离D成正比例的误差,即光速值误差,大气折射率误差和测距频率误差;另一部分是与距离无关的误差,即测相误差,加常数误差,对中误差。
故,将测距精度表达式简写成MD=±(A+B×D),式中A为固定误差,以mm为单位,B为比例误差系数以mm/km为单位,D为被测距离以km为单位。
目前测绘生产单位配备的测图用全站仪的测距标称精度大多为MD=3mm+2mm/km×D。
在这里D取测站点到待测点之间的《城市测量规范》规定的限值。
通过计算得到各比例尺测图中测距中误差值MD,如下表:比例 D (km)MD ( mm)
1:500 0.150 3.3
1:1000 0.250 3.5
1:2000 0.400 3.8
3、分析全站仪测图的点位中误差M 根据前面对测角和测距精度的分析,运用误差传播定律来分析估计全站仪测图在工作中的实测点位中误差(相对于图根点)。
①建立定点(X Y)与角度(β)、距离(D)之间的出数关系式,X=Dcosβ,Y=Dsinβ;②对上述出数关系式全微分,求出具真误差关系式:△X=cosβ△D-D×sinβ△β, △Y=sinβ△D+D×sinB△B ③根据误差传播定律写出中误差平方关系式:Mx2=cos2βMD2+D2sin2βM2β My2=sin2βMD2+D2cos2βMβ2 M==,此式就是点位中误差与角度中误差Mβ,距离中误差MD及距离D的关系式,根据此式及《城市测量规范》规定的D的限值,通过计算得出下表:
比例距离D MD 标称测角精度"Mβ"M( mm)
2 50.4 36.8
1:500 150 3.3
5 51.2 37.4
1:1000 250 3.5 2 30.2 36.8
5 31.
6 38.5
2 19.1 37.2
1:2000 400 3.8
5 21.2 41.3
由以上分析及计算数据知,全站仪在测图运用中的点位精度远远优于规范给出的精度(附表)要求。
二、全站仪测图高程中误差分析。
众所周知,全站仪测图的高程为三角度程,而三角高程单向观测的高差计算公h=D×tanαv+(1-k) D2/2R+i-v,对公式进行全微分求出真误差关系式,然后根据误差传播定律求出中误差平方关系式为:M h2=(tanαv+(1-k)D/R) 2 MD2+(D×secαv)2Mαv+(D2/2R)2Mk2+Mi2+Mv2。
由中误差平方关系式分析各变量的取值。
1、分析竖角测角精度,全站仪的标称精度为M标,则测图中竖角的半测回中误差M半测=2M标(与前面水平角分析类似)。
2、分析仪器高i与目标高v的量取精度,根据本人在工作中的经验,两次量取仪器高i与目标高v的差数不会超过3mm,即d≤3mm,运用误差传播定律同精度双观测求中误差公式则Mi=Mv==±2.1mm。
3、分析大气垂直折光差系数误差,根据《城市测量规范》条文说明中对此项的分析,估计Mk=+0.05,
4、在城市数字测图中地形的起伏一般不会超过25°这里取αv=25°由于测图中地面点高程H 的精度是相对于图根控制点而言的,即图根控制点高程可视为真值,则MH=Mh 根据以上分析与取值,计算得下表:
比例 D MD Mi Mv Mk M标M半测MH(mm)
2 4 4.6
1:500 150 3.3 2.1 2.1 0.05
5 10 8.7
2 4 6.3
1:1000 250 3.5 2.1 2.1 0.05
5 10 13.8
1:2000 400 3.8 2.1 2.1 0.05 2 4 9.1
5 10 21.7
由表格数据知,全站仪测图地面点高程精度远优于规范规定的限差(附表)。
但在实际工作中由于地面土质的影响,以及有些点不方便目标的放置等因素的影响导致棱镜中心至地面的高度有误差,所以实际工作中的高程误差要高于以上的误差估计。
附:《城市测量规范》对点位中误差、高程中误差的有关规定。
4.1.8图上地物点相对于邻近图根点的点位中误差与邻近地物点间距中误差应符合表4.1.8的规定
表4.1.8(图上 mm)
地区分类点位中误差邻近地物点间距中误差城市建筑区和平地、丘陵地≤0.5≤0.4
山地、高山地和设站施测困难的旧
≤0.75≤0.6
街坊内部
4.1.9⒈城市建筑区和基本等高距为0.5m的平坦地区,其高程注记点相对于邻近图根点的高程中误差不得大于±0.15m。
⒊等高线插求点相对于邻近图根点的高程中误差应符合表4.1.9的规定。
表4.1.9
地形类别平地丘陵地山地高山地
高程中误差(等高
≤1/3≤1/2≤2/3≤1距)。