直升机飞行操控的基本原理
- 格式:doc
- 大小:1.49 MB
- 文档页数:10
直升飞机飞行原理直升机是一种垂直起降的飞行器,它可以在空中悬停、向前、向后、向左、向右飞行,还可以进行定点停留、低高度飞行、复杂地形涂毒、运输货物等,是一种非常灵活多变的飞行器。
那么,直升机是如何实现这种“绕不过去”的飞行方式的呢?下面,我们来了解一下直升机的飞行原理。
一、空气动力学基础不论是飞机还是直升机,它们都要靠空气动力学来实现飞行。
空气动力学是研究空气对物体的作用的学科。
在空气中,物体移动时,空气会对其产生阻力、升力和推力等作用。
在直升机的飞行中,最主要的就是升力了。
升力是空气对直升机产生的向上的支持力,使其能够腾空而起。
而产生升力的关键,则是由于在直升机的旋转叶片上产生了一个向下的气流,这个气流将气体压缩,使其速度加快,压力降低,形成低压区。
而直升机上方的空气则形成高压区,从而产生了升力。
二、基本构造1.机身部分:直升机的主体部分,其中装置有驾驶室、乘客和货物舱、发动机等。
2.旋翼部分:直升机最重要的部分,由主旋翼和尾旋翼组成。
3.主旋翼:是直升机上的最重要的部分,主要产生升力和推进力。
它是一组大型的可旋转叶片,可以轮流地在上下、左右和前后方向调整。
4.尾旋翼:又称为方向舵,主要负责平衡和转向直升机。
5.起落架:支撑直升机在地面或者水面上的装置。
三、飞行原理我们知道,飞机在飞行中通过翼面产生升力和推力来维持飞行。
而直升机则是通过旋翼来产生升力和推力,从而可以实现垂直起降和各种方向的移动。
正常飞行时,主旋翼的旋转速度越快,升力就越大。
主旋翼在旋转时还产生了空气流,对于尾旋翼而言,这种空气流就相当于一束强劲的风,从而也可以产生升力和推力,平衡直升机并控制飞行方向。
直升机的旋翼不仅可以产生升力和推力,还可以调整飞行方向。
当主旋翼向右旋转时,直升机就会向左飞行,反之亦然。
而尾旋翼则可以扭转调整直升机的飞行方向。
在直升机的飞行过程中,由于旋翼旋转的高速气流形成较大的后向力,所以需要加装平衡重量使其平衡。
直升机飞行手册一、介绍直升机作为一种独特的飞行器具有广泛的应用。
本文将详细介绍直升机飞行手册,包括基本原理、飞行操纵、安全操作等内容。
二、基本原理直升机的飞行原理有别于固定翼飞机。
直升机通过产生升力和推力来保持飞行平衡。
2.1 产生升力直升机通过旋转主旋翼产生升力。
主旋翼的叶片角度和旋转速度决定了产生的升力大小。
2.2 产生推力直升机通过尾旋翼产生推力,以抵消主旋翼反作用力和旋转桨叶产生的扭矩。
三、飞行操纵直升机的飞行操纵包括操纵杆、脚踏板和控制面等操作。
3.1 操纵杆操纵杆用于控制直升机的上下倾斜和左右转向。
向前推动操纵杆可以使直升机向前倾斜,增加前进速度。
3.2 脚踏板脚踏板用于控制直升机的转向,向左踏板可以使直升机向左转向,向右踏板则相反。
3.3 控制面直升机的控制面包括副翼、升降舵和方向舵等。
副翼用于横滚控制,升降舵用于上升和下降控制,方向舵用于方向控制。
四、安全操作直升机的安全操作对飞行员来说至关重要。
以下是一些安全操作的注意事项。
4.1 事前检查在飞行前必须进行彻底的事前检查,包括机身、旋翼、发动机、燃油系统等。
确保所有部件正常运作,不存在故障或损坏。
4.2 保持平衡直升机在飞行过程中需要保持平衡,飞行员需要不断调整操纵杆和脚踏板来控制飞行姿态。
保持飞行平衡可以提高飞行的安全性。
4.3 飞行规则遵守飞行规则是确保航空安全的重要措施。
飞行员应严格遵守空中交通管制规定,如保持适当距离、避免违规飞行等。
4.4 应急处置在紧急情况下,飞行员应能够迅速做出正确决策和应急处置。
训练良好的飞行员能够在危险情况下保持冷静,并及时采取必要的应对措施。
结论直升机飞行手册包括基本原理、飞行操纵和安全操作等内容。
了解和掌握这些知识对于成为一名合格的直升机飞行员至关重要。
飞行员需要在训练中不断学习和提升自己的技能,以确保飞行的安全和顺利。
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
直升机的飞控原理直升机的飞控系统是控制直升机飞行的核心部件,它的基本原理是通过对旋钮、操纵杆等操纵装置的操作转换成电信号,再通过电子设备对这些信号进行处理和控制,最终传达给直升机各个部位,实现对直升机姿态、航向、高度、速度等参数的控制。
直升机的飞控系统由多个部分组成,包括飞行总线、飞行控制计算机、电动操纵表面、液压操纵系统等。
飞行总线是连接飞行控制计算机和其他部件的通信系统,用于传输控制指令和接收状态信息。
飞行控制计算机是控制系统的核心,负责处理操纵装置转换成的电信号,根据飞行任务要求和飞行状态进行计算和控制,再通过飞行总线向其他部件发送控制指令。
直升机的飞控系统实现对姿态的控制主要是通过电动操纵表面和液压操纵系统来实现的。
电动操纵表面一般包括前翼、副翼和方向舵等,通过电机驱动改变表面的位置和角度,从而改变直升机的姿态。
液压操纵系统一般包括液压泵、液压缸和液压阀等,通过泵将液压油输送到缸中,使缸表面的活塞发生位移,进而改变操纵表面的位置和角度。
直升机的飞控系统还可以实现对航向、高度和速度等参数的控制。
航向控制主要是通过控制尾桨的转动来实现的。
尾桨通过尾桨马达驱动,可以改变直升机的航向。
高度控制主要是通过改变旋翼的推力来实现的。
旋翼的叶片角度可以通过电机驱动的系统或液压驱动的系统进行调节,从而改变旋翼的推力。
速度控制主要是通过改变旋翼的转速来实现的。
旋翼的转速可以通过燃油分配系统或液压调节系统来进行控制。
飞行控制计算机是直升机飞控系统的核心部件,它通过接收操纵装置的输入信号,根据飞行任务和状态信息进行计算和控制,最终向操纵表面和液压操纵系统发送控制指令。
飞行控制计算机一般具有实时计算、状态估计和故障处理等功能。
它可以实现对直升机的自动控制和稳定飞行。
总之,直升机的飞控系统是控制直升机飞行的关键部件,通过操纵装置的操作转换成电信号,然后通过飞行控制计算机进行处理和控制,最终传达给直升机各部件,实现对直升机的姿态、航向、高度、速度等参数的控制。
飞行原理(图解)直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。
旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。
旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题.直升机主旋翼反扭力的示意图没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法直升机抵消反扭力的方案有很多,最常规的是采用尾桨。
主旋翼顺时针转,对机身就产生逆时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力.抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。
有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。
尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。
极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆.尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。
为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性.尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制.在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。
直升机控制方向的原理直升机控制方向的原理可真是个有趣的话题!大家都知道,直升机看似在空中翩翩起舞,实际上它的控制原理可不简单。
想象一下,直升机就像是一位优雅的舞者,随时准备在空中翻转、旋转。
这其中的关键,当然少不了那几个重要的部分,像是主旋翼、尾旋翼,还有驾驶舱里的各种操控杆。
主旋翼就像直升机的心脏,负责提供升力。
说白了,就是让它飞起来的那个“推手”。
当飞行员拉动操控杆,主旋翼的角度就会发生变化,升力也随之变化。
就像人们在跳舞时需要根据节奏调整动作,直升机也得根据飞行的需求来调整旋翼的角度。
这时候,飞行员就像是导演,负责指挥这场空中舞蹈。
只要一用力,直升机就会瞬间向上升,真是太酷了!尾旋翼也是个关键角色,别小看它!它的作用是抵消主旋翼带来的扭转力。
如果没有尾旋翼,直升机可能会在空中像个失控的陀螺,转得人晕头转向。
尾旋翼通过调整自己的角度,给直升机提供了一个稳定的方向感。
简而言之,尾旋翼就像是舞者的另一只手,帮助保持平衡。
飞行员只需要稍微调一下控制杆,就能让直升机稳定地向某个方向飞去,真是灵活得很!在实际飞行中,直升机的控制可不是一帆风顺的。
风的影响、空气的流动,还有各种气候变化,都会对飞行造成挑战。
这时候,飞行员的技术就显得尤为重要。
可以说,飞行员就像是直升机的灵魂人物,操控着这台空中机器在各种情况下游刃有余。
面对突如其来的气流,飞行员只需迅速调整操控杆,直升机就能像一只灵活的小鸟,轻松应对。
想想看,能在空中自由飞翔,那种感觉简直就是人生赢家!飞行员在操作直升机时,还得运用到“集体控制”和“局部控制”的原理。
集体控制主要影响主旋翼的角度,决定直升机的升降。
而局部控制则是调整尾旋翼,帮助直升机进行转向。
就好比在团体舞中,大家需要配合默契,才能跳得好。
飞行员通过精妙的配合,令直升机在空中游走如飞。
这个过程真的是一门艺术,甚至有点像是在空中绘画,每一个动作都是一笔,最终勾勒出一幅美丽的图画。
说到直升机的方向控制,那可真是个技术活!飞行员通过操控杆的前后左右移动,来实现直升机的飞行方向。

直升飞机飞行原理直升飞机是一种垂直起降的飞行器,它的飞行原理与其他飞机有很大的不同。
直升飞机的飞行原理主要是通过旋翼的旋转产生升力,从而使飞机垂直起降和悬停在空中。
本文将详细介绍直升飞机的飞行原理。
一、旋翼的构造和工作原理直升飞机的旋翼是其最重要的部件之一,它由一组叶片、旋转轴和旋翼头组成。
旋翼的叶片通常是由铝合金、复合材料或碳纤维等材料制成,其长度和形状根据不同的设计和用途而有所不同。
旋转轴是旋翼的支撑轴,它通常位于飞机的顶部,可以使旋翼在水平方向上旋转。
旋翼头是旋翼的连接部件,它将旋翼与飞机的机身连接在一起。
旋翼的工作原理是利用叶片的旋转产生升力。
当旋翼旋转时,叶片的前缘会受到空气的冲击,从而产生向上的升力。
这种升力是由于叶片的形状和旋转速度所产生的。
叶片的形状通常是对称的,这样可以使叶片在旋转时产生相等的升力。
旋转速度越快,产生的升力就越大。
因此,直升飞机的升力主要是由旋翼的旋转速度所决定的。
二、旋翼的控制直升飞机的旋翼可以通过改变叶片的角度来控制飞机的方向和高度。
这种控制方式称为旋翼变距控制。
旋翼变距控制是通过改变叶片的角度来改变叶片所产生的升力,从而控制飞机的方向和高度。
当叶片的角度增加时,产生的升力也会增加,飞机就会上升;当叶片的角度减小时,产生的升力也会减小,飞机就会下降。
除了旋翼变距控制外,直升飞机还可以通过尾旋翼和侧向推力器来控制飞机的方向。
尾旋翼是位于飞机尾部的小型旋翼,它可以通过改变叶片的角度来产生侧向力,从而控制飞机的方向。
侧向推力器是位于飞机两侧的小型喷气发动机,它可以产生侧向推力,从而控制飞机的方向。
三、直升飞机的飞行特点直升飞机的飞行特点主要是垂直起降和悬停。
由于旋翼可以产生垂直向上的升力,因此直升飞机可以在没有跑道的情况下垂直起降。
此外,直升飞机还可以通过旋翼变距控制来悬停在空中,这种能力使得直升飞机在执行救援、运输和军事任务时具有很大的优势。
直升飞机的另一个特点是速度较慢。
直升机的工作原理
直升机的工作原理是利用主旋翼和尾推力来产生升力和动力。
主要包括以下几个部分:
1. 主旋翼:主旋翼是直升机最重要的部分,通常由三至六片可调节的旋翼叶片组成。
当发动机提供足够的动力使主旋翼快速旋转时,旋翼叶片会产生升力。
通过改变叶片的推力和螺旋桨角度,可以控制直升机的升力和姿态。
2. 尾推力:直升机的尾部有一根垂直的尾旋翼,它的作用是产生推力和水平方向的倾斜力。
通过改变尾旋翼的推力和方向,可以控制直升机的方向和平衡。
3. 方向舵:直升机的尾部还有一个水平的方向舵,用来控制直升机的左右转向。
通过改变方向舵角度,可以改变直升机的水平方向。
4. 发动机:直升机的发动机通常是内燃机或涡轮发动机,提供所需的动力和转动力给主旋翼。
5. 操纵系统:直升机的操纵系统包括操纵杆、脚踏板、控制杆等。
驾驶员通过操纵这些操纵设备来改变主旋翼和尾推力的推力、角度和方向,从而控制直升机的升力、姿态和飞行方向。
总结来说,直升机的工作原理通过旋转的主旋翼产生升力,通过尾推力和调整方向舵来控制飞行方向,通过发动机提供动力。
驾驶员通过操纵系统来控制这些机构,使直升机飞行在所需高度和方向上。
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
直升飞机原理
直升飞机是一种垂直起降的飞行器,其原理基于空气动力学和机械工程的原理。
首先,直升飞机通过一个或多个旋转的主旋翼产生升力。
主旋翼由多个叶片组成,通常由轻质的、高强度的材料制成。
当主旋翼高速旋转时,它会将空气向下压,同时产生向上的反作用力,即升力。
这种升力足以支持直升飞机在空中悬停、起飞和降落。
为了保持平衡,直升飞机通常还配备了一个尾旋翼。
尾旋翼通常位于飞机尾部,以一个垂直轴旋转。
尾旋翼的作用是产生一个向左或向右的力,以抵消主旋翼产生的扭矩。
这使得直升飞机可以在飞行中保持平衡。
除了主旋翼和尾旋翼外,直升飞机还配备了一个发动机。
发动机通常位于飞机的尾部,可以提供足够的推力,使得直升飞机能够垂直起飞和降落。
发动机一般使用燃油燃烧或者电力来产生动力,并通过传动系统将动力传递给主旋翼和尾旋翼。
此外,直升飞机还配备了一系列的控制系统,包括操纵杆、螺旋桨蓝宝石等。
操纵杆用于控制飞机的方向和倾斜,螺旋桨蓝宝石用于改变主旋翼和尾旋翼的旋转速度。
总结起来,直升飞机通过主旋翼产生升力,尾旋翼抵消扭矩,发动机提供动力,控制系统控制飞机的方向和倾斜。
这些原理的相互配合使得直升飞机能够实现垂直起降和悬停在空中。
直升机上的工作原理是什么
直升机的工作原理是通过旋转机翼产生升力,推动机械驱动力来实现飞行。
具体包括以下步骤:
1. 旋翼产生升力:直升机通常配备一个或多个主旋翼,旋翼由数个可调节的桨叶组成。
当发动机提供动力,使旋翼以适当的速率旋转时,桨叶产生升力,向上推动直升机。
2. 控制俯仰:为了改变直升机的俯仰姿态(前后倾斜),可调节桨叶的角度。
当主旋翼前后倾斜时,升力的方向也会发生变化,从而使得直升机向前或向后倾斜。
3. 控制横滚:直升机的横滚姿态(左右倾斜)也可以通过旋翼桨叶的调整来实现。
当主旋翼的一侧上升,并与另一侧下降时,会产生一个横向推力,使得直升机向左或向右倾斜。
4. 推进力:为了提供向前飞行的推进力,直升机通常安装一个尾推装置,如旋转叶片的尾桨或尾喷气发动机。
这些设备产生推力,抵消直升机的阻力,使其能够在空中移动。
总的来说,直升机的工作原理基于旋转机翼产生升力和通过各种方式控制姿态来实现飞行。
直升机自动起飞的原理
直升机的自动起飞原理是通过使用飞行控制系统(Flight Control System,简称FCS)来实现的。
具体来说,自动起飞包括以下几个步骤:
1. 航向确定:飞行控制系统通过导航设备获取航向信息,确定直升机起飞时的目标航向。
2. 油门控制:飞行控制系统根据驾驶员的指令或预先设定的起飞程序,控制发动机输出合适的推力。
3. 主旋翼控制:飞行控制系统根据飞行状态以及驾驶员的指令,控制主旋翼的螺距角,使得直升机在起飞过程中能够保持稳定的升力和姿态。
4. 尾桨控制:在直升机起飞时,尾桨的作用是保持飞机的方向稳定。
飞行控制系统会根据飞行状态和驾驶员的指令来控制尾桨的螺距角。
5. 马达控制:直升机起飞时,需要使用马达增加发动机输出推力。
飞行控制系统通过控制马达的转速来实现。
6. 监控系统:飞行控制系统会通过传感器和监控设备来监测直升机的状态变化,如姿态、速度等,以及环境因素,如气压、温度等,从而对起飞过程进行实时调整和控制。
综上所述,直升机的自动起飞原理主要是通过飞行控制系统来控制发动机推力、主旋翼、尾桨以及马达等要素,以实现直升机在起飞过程中的稳定性和安全性。
直升机飞行操控的基本原理图1直升机飞行操纵系统-概要图(a)(b)图2直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15 )、伺服机构(横滚+总距)(16 )、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
161.右侧周期变距操纵杆 3.左侧周期变距操纵杆2.可调摩擦装置 4.橡胶波纹套 5.俯仰止动件 6.复合摇臂7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图3直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
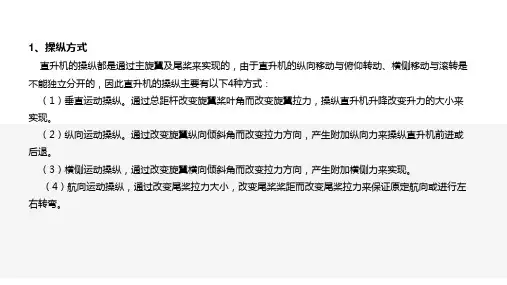
直升机的操纵原理直升机是一种能够在垂直方向起降、悬停、向前、向后飞行的航空器。
其操纵原理可以分为以下四个方面:旋翼产生升力、产生推力、控制飞行方向、控制飞行姿态。
首先,旋翼产生升力。
升力是直升机支撑自身重量并向上飞行的力量。
直升机通过旋翼产生升力,而旋翼由多个类似于扇叶的叶片组成。
旋翼转动时,叶片受到空气流动的作用,产生升力。
旋翼上部叶片的迎角较大,可以产生较大的升力,而旋翼下部叶片的迎角较小,产生较小的升力。
这样可以使得直升机具有向上的力量。
其次,直升机通过改变旋翼的倾斜角度来产生推力。
旋翼的倾斜角度可以通过整个旋翼系统来改变,包括主旋翼和尾旋翼。
当主旋翼的倾斜角度发生变化时,产生的升力力量也会发生改变。
通过控制旋翼的倾斜角度,直升机可以产生向前和向后的推力,从而实现水平方向的飞行。
第三,直升机通过控制旋翼的一些叶片来改变飞行的方向。
主旋翼通常由四个叶片组成,每个叶片可以独立地改变其迎角。
通过改变迎角,直升机的飞行方向可以向左或向右转弯。
这是通过改变不同叶片的迎角来实现的,从而改变旋翼所产生的升力力线,进而改变直升机的飞行方向。
最后,直升机通过改变旋翼的迎角来控制飞行姿态。
飞行姿态是指直升机的倾斜和俯仰的角度。
改变旋翼的迎角可以产生不同方向的升力,从而使直升机倾斜或俯仰。
通过控制旋翼的迎角,直升机可以控制飞行的倾斜和俯仰,以保持平稳的飞行。
综上所述,直升机通过旋翼产生升力和推力,并通过控制旋翼的倾斜角度、迎角等来控制飞行方向和姿态。
这些操纵原理的运用使得直升机可以实现在垂直方向的起降、悬停、向前、向后飞行,具有较高的机动性和灵活性。
直升机原理详解真实完整版
一、直升机原理介绍
直升机是一种小型、低速、低高度的飞行器,主要用于旅游、救援、军事等用途。
它具有悬停、前进、垂直起降、降落和精确的位置控制等优势,因此,它被称为“空中汽车”。
它的原理是利用翼子柱、涡轮、螺旋桨和马达等部件的协作,使直升机具有上升、降落、悬停和前行等能力。
二、翼子柱工作原理
翼子柱是直升机的支架,它的几何形状类似于梯形,两端以螺旋桨为基础,其上垂直地支撑着悬置翼系统,它能够改变翼系统的外形和重力平衡,以控制直升机的上升、旋转、转弯等飞行动态,是控制直升机合理飞行的主要构成部件。
三、涡轮和螺旋桨工作原理
涡轮是直升机的动力部件,它可以减少翼子柱的前进阻力,并使直升机获得足够的推力,使其可以在较低的高度和较短的距离内完成降落和起飞的任务。
螺旋桨是直升机的飞行控制部件,它可以控制翼子柱的角度,从而改变翼系统的外形,实现升降和转弯操作,它可以加快或减慢直升机的速度,而涡轮则可以增加推力,这样直升机才能垂直起降,也可以改变方向和高度。
四、马达的工作原理
马达是直升机的动力源,它可以从地面供电而获得动力。
直升机飞行操控的基本原理
图1 直升机飞行操纵系统- 概要图
(a)
(b)
图2 直升机操纵原理示意图
1.改变旋翼拉力的大小
2.改变旋翼拉力的方向
3.改变尾桨的拉力
飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统
周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、
总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆
2.可调摩擦装置 4.橡胶波纹套 5.俯仰止动件 6.复合摇臂7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件1
3.总距拉杆1
4.与复合摇臂相连接的拉杆1
5.伺服机构1
6.伺服机构(横滚+总距)1
7.伺服机构(俯仰+总距)1
8.可调拉杆
图3 直升机周期变距操纵系统
(一)纵向操纵情况
当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固
定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
后拉驾驶杆,情况相反。
(二)横向操纵情况
当右压驾驶杆时,驾驶杆向右偏转,带动左横滚连杆(7)向前运动,同时右横滚连杆(7)向后运动。
通过复合摇臂(6)及其后的拉杆、摇臂,使左后侧横向伺服机构上移,右侧伺服机构下移,自动倾斜器固定盘向右前方倾斜,旋翼桨盘右倾,进而使直升机向右运动。
左压驾驶杆情况相反。
二、总距操纵系统
总距操纵系统用于操纵旋翼的总桨距,使各片桨叶的桨距同时增大或减小,从而改变旋翼拉力的大小。
旋翼总桨距改变时,其需用功率也随之改变。
因此,还必需相应地改变发动机的油门,使发动机输出功率与旋翼的需用功率相匹配。
为了减轻驾驶员的负担,通常将发动机的油门操纵与总桨距操纵交联。
这样,当驾驶员操纵总桨距时,发动机的油门开度(供油量)也相应改变。
所以,总桨距操纵又称为桨距—油门操纵,它是由一根桨距—油门杆来进行操纵的。
旋翼的总桨距以及周期变距操纵都是通过自动倾斜器实现的。
总距操纵系统包括旋翼手柄(1)、可调摩擦装置(2)、总距扭矩管(3)、总距拉杆(4)、复合摇臂(5)、总距杆配平弹簧(6)、总距止动件及中心位置定位孔(7)、左侧和右侧总距杆(8)和(9)、复合摇臂上的预调器操纵摇臂(10)、横滚连杆(11)、俯仰拉杆(12)、与复合摇臂相连接的拉杆(13)、伺服机构(14)、伺服机构(横滚+总距)(15)、伺服机构(俯仰+总距)(16)和可调拉杆(17)等组件。
1.旋翼手柄
2.可调摩擦装置
3.总距扭矩管
4.总距拉杆
5.复合摇臂
6.总距杆配平弹簧
7.总距止动件及中心位置定位孔
8.左侧总距杆
9.右侧总距杆10.复合摇臂上的预调器操纵摇臂11.横滚连杆12.俯仰拉杆13.与复合摇臂相连接的拉杆14.伺服机构
15.伺服机构(横滚+总距16.伺服机构(俯仰+总距)17.可调拉杆
图4 直升机总距操纵系统
当上提总距杆时,总距拉杆(4)向前运动,带动复合摇臂及其上的三个周期变距操纵摇臂顺时针旋转,经后面三个拉杆(13)、摇臂传动使伺服机构作动筒壳体都向上移动同一位移,自动倾斜器也上移同一位移,三片桨叶安装角同时增大某一值,进而使直升机的升力增加。
下放总距杆时正好相反。
三、航向操纵系统
航向操纵系统用于操纵尾桨叶的桨距,改变尾桨推力(或拉力)大小,以实现航向操纵。
航向操纵系统由脚蹬组件和操纵线系两大部分组成。
航向操纵系统(见图8-7和8-8)包括右侧脚蹬组件(1)、尾梁中的连接装置(2)、航向柔性操纵钢索(3)、止动件(4)、左侧脚蹬组件(5)和扭力管(6)等组件。
1.右侧脚蹬组件
2.尾梁中的连接装置
3.航向柔性操纵索
4.止动件
5.左侧脚
蹬组件
6.扭力管
图5 直升机航向操纵系统
图6 脚蹬组件分解
驾驶员蹬脚蹬,经操纵线系,保持或改变尾桨叶的桨距,以改变尾桨推力的大小,保持或改变直升机的方向。
当向前蹬右脚蹬时,尾桨叶桨距增加,进而增加尾桨推力,直升机向右转;而向前蹬左脚蹬时,效果正好相反。
四、飞行操纵系统简要说明
图5 操纵杆操作简要示意图
图6总桨距操作简要示意图
尾桨操纵的工作原理:
当向前蹬右脚蹬时,尾桨桨距
增加,当向前蹬左脚蹬时其效果相
反。
旋翼操纵系统的工作原理:
周期变距操纵杆和总桨距操纵
杆的作用如图7所示。
1) 横向周期变距操纵杆的作
用:
当向左压周期变距操纵杆时,左
右横向线系作反向的等距运动,使自
动倾斜器绕Y轴(该Y轴通过纵向伺服
机构安装点)向右倾斜。
2)纵向周期变距操纵杆的作
用:
当向前推周期变距操纵杆时,
纵向线系使自动倾斜器绕X轴(该轴
通过两个横向伺报机构的安装点)向
前倾斜。
3) 总桨距操纵杆的作用:
当上提总桨距操纵杆时,总桨距
值增大,纵向和横向线系自复合摇臂处起,在相同方向作等量的位移,使得自动倾斜器平行于初始位置向上平移。
图8 复合摇臂运动示意图。