吴大正《信号与线性系统分析》(第4版)名校考研真题(信号与系统)【圣才出品】
- 格式:pdf
- 大小:424.60 KB
- 文档页数:5

第5章连续系统的s域分析一、选择题1.信号的拉普拉斯变换为()。
【答案】C【解析】为t与u(t)的卷积,u(t)的拉氏变换为1/s,t的拉氏变换为,时域的卷积对应频域的乘积,所以×=。
2.f(t)=e2t u(t)的拉氏变换及收敛域为()。
【答案】C【解析】u(t)的拉氏变换为1/s,根据频域的平移性质,x(t)jcte-←−→X(s-c)。
题中c=2,右边信号的收敛域大于极点。
3.已知某信号的拉氏变换式为,则该信号的时间函数为()。
A.e-α(t—T)u(t-T)B.e-αt u(t-T)C.e-αt u(t-α)D .e -αu (t -T ) 【答案】B【解析】可采用从时域到频域一一排除的方法,u (t )的拉氏变换为1/s,根据时移性,u (t -T )的拉氏变换为s e sT -,再根据频域的时移性,e -αt u (t -T )的拉氏变换为sesT-的s 左移α,即se sT-中的s 加上α。
可推断出B 项的拉氏变换为。
4.信号f (t )=(t +1)u (t +1)的单边拉普拉斯变换为( )。
【答案】B【解析】f (t )是tu (t )向左移1个单位时间后的结果,由于单边拉氏变换只研究0t ≥的时间函数,故不能利用性质求F (s )。
因此可认为f (t )与(t +1)u (t )的单边拉氏变换相同,于是2111(t )u(t )s s+↔+。
5.信号u (t )-u (t -2)的拉普拉斯变换及收敛域为( )。
【答案】A【解析】阶跃u (t )的拉普拉斯变换为s1,根据拉普拉斯变换的时移性,f (t -0t ))(0s F ets -−→←,则u (t )的拉普拉斯变换为se s2-。
6.象函数的拉普拉斯逆变换为( )。
【答案】B【解析】由常用拉氏变换和拉氏变换的性质知()1(),,s sT s a T ate e u t s s s a--+-↔↔↔+时域平移u(t-T)域平移e u(t-T) 首先将F (s )变形为:e sT T e s αα--+,e st s α+的逆变换为(t T )e u(t T )α---,T e α-为常数,所以所求的逆变换为(t T )eu(t T )α---T e α-=t e u(t T )α--。
目 录第1章 信号与系统1.1 复习笔记1.2 课后习题详解1.3 名校考研真题详解第2章 连续系统的时域分析2.1 复习笔记2.2 课后习题详解2.3 名校考研真题详解第3章 离散系统的时域分析3.1 复习笔记3.2 课后习题详解3.3 名校考研真题详解第4章 傅里叶变换和系统的频域分析4.1 复习笔记4.2 课后习题详解4.3 名校考研真题详解第5章 连续系统的s域分析5.1 复习笔记5.2 课后习题详解5.3 名校考研真题详解第6章 离散系统的z域分析6.1 复习笔记6.2 课后习题详解6.3 名校考研真题详解第7章 系统函数7.1 复习笔记7.2 课后习题详解7.3 名校考研真题详解第8章 系统的状态变量分析8.1 复习笔记8.2 课后习题详解8.3 名校考研真题详解第1章 信号与系统1.1 复习笔记一、信号的基本概念与分类信号是载有信息的随时间变化的物理量或物理现象,其图像为信号的波形。
根据信号的不同特性,可对信号进行不同的分类:确定信号与随机信号;周期信号与非周期信号;连续时间信号与离散时间信号;实信号与复信号;能量信号与功率信号等。
二、信号的基本运算1加法和乘法f1(t)±f2(t)或f1(t)×f2(t)两信号f1(·)和f2(·)的相加、减、乘指同一时刻两信号之值对应相加、减、乘。
2.反转和平移(1)反转f(-t)f(-t)波形为f(t)波形以t=0为轴反转。
图1-1(2)平移f(t+t0)t0>0,f(t+t0)为f(t)波形在t轴上左移t0;t0<0,f(t+t0)为f(t)波形在t轴上右移t0。
图1-2平移的应用:在雷达系统中,雷达接收到的目标回波信号比发射信号延迟了时间t0,利用该延迟时间t0可以计算出目标与雷达之间的距离。
这里雷达接收到的目标回波信号就是延时信号。
3.尺度变换f(at)若a>1,则f(at)波形为f(t)的波形在时间轴上压缩为原来的;若0<a<1,则f(at)波形为f(t)的波形在时间轴上扩展为原来的;若a<0,则f(at)波形为f(t)的波形反转并压缩或展宽至。
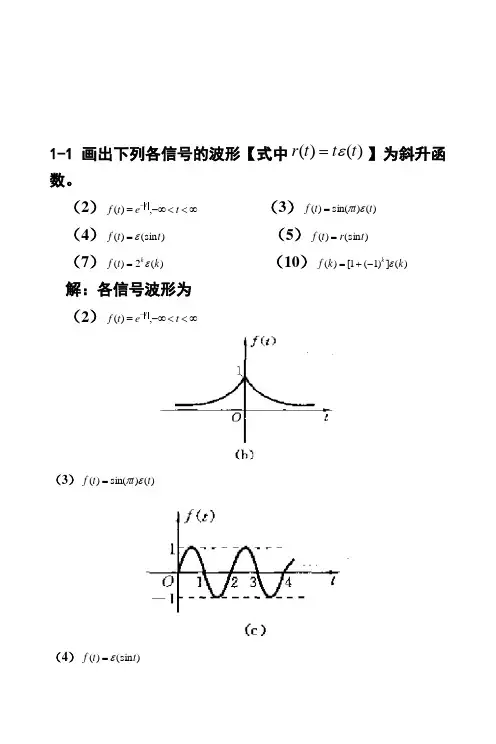
第一章 信号与系统(一)1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。
(2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)((3))()sin()(t t t f επ=(4))(sin )(t t f ε=(5))f=rt)(sin(t(7))t=(kf kε(2)(10))f kεk=(k+-((])11[)1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(k k k f k ---=εε解:各信号波形为 (1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=kkkkfεεπ(12))]()3([2)(kkkf k---=εε1-3 写出图1-3所示各波形的表达式。
1-4 写出图1-4所示各序列的闭合形式表达式。
1-5 判别下列各序列是否为周期性的。
如果是,确定其周期。
(2))63cos()443cos()(2ππππ+++=k k k f (5))sin(2cos 3)(5t t t f π+=解:1-6 已知信号)(t f 的波形如图1-5所示,画出下列各函数的波形。

1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。
(2)∞<<-∞=-t et f t,)( (3))()sin()(t t t f επ=(4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f kε= (10))(])1(1[)(k k f kε-+=解:各信号波形为 (2)∞<<-∞=-t et f t,)((3))()sin()(t t t f επ=(4))(sin )(t t f ε=(5))f=rt)(sin(t (7))t(k=f kε)(2(10))f kεk=(k+-((])11[)1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(k k k f k ---=εε解:各信号波形为(1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(k k k f k---=εε1-3 写出图1-3所示各波形的表达式。
1-4 写出图1-4所示各序列的闭合形式表达式。
1-5 判别下列各序列是否为周期性的。
如果是,确定其周期。
(2))63cos()443cos()(2ππππ+++=k k k f (5))sin(2cos 3)(5t t t f π+=解:1-6 已知信号)(t f 的波形如图1-5所示,画出下列各函数的波形。

专业课习题解析课程第1讲第一章信号与系统(一)专业课习题解析课程第2讲第一章 信号与系统(二)1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。
(2)∞<<-∞=-t et f t,)( (3))()sin()(t t t f επ=(4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f kε= (10))(])1(1[)(k k f kε-+=解:各信号波形为 (2)∞<<-∞=-t et f t,)((3))()sin()(t t t f επ=(4))(sin )(t t f ε=(5))tf=r)(sin(t(7))f kε=t)(2(k(10))(])1(1[)(k k f k ε-+=1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11))]7()()[6sin()(--=k k k k f εεπ(12))]()3([2)(k k k f k---=εε 解:各信号波形为(1))2()1(3)1(2)(-+--+=t t t t f εεε(2))2()1(2)()(-+--=t r t r t r t f(5))2()2()(t t r t f -=ε(8))]5()([)(--=k k k k f εε(11))]7()()[6sin()(--=kkkkfεεπ(12))]()3([2)(kkkf k---=εε1-3 写出图1-3所示各波形的表达式。
1-4 写出图1-4所示各序列的闭合形式表达式。
1-5 判别下列各序列是否为周期性的。
第7章系统函数一、填空题1.若某信号f(t)的单边拉氏变换为,请写出该信号的傅里叶变换。
【答案】【解析】如果F(s)在虚轴上有k 重w 0的极点,由公式得该信号的傅里叶变换1(1)0021()()()(1)!k k s jw K j F s w w j w k w πδπδ--='+-=-+-。
2.为使线性时不变离散因果系统是稳定的,其系统函数H(s)的极点必须在s 平面的。
【答案】左半平面【解析】因果系统的z 域在极点右面,稳定系统的z 域必须包括虚轴,所以极点在左半平面。
3.离散系统的信号流图如图7-1所示,则H(z)==。
图7-1【答案】【解析】根据信号流图4.线性时不变离散因果系统的系统函数,判断系统是否稳定(填是或否)。
【答案】是【解析】21()(0.1)(0.5)z z H z z z ++=--其极点为120.1,0.5ρρ==,因为两极点均在单位圆之内,故系统是稳定系统。
二、分析计算题1.描述线性非时变系统的微分方程为(1)写出系统函数H(s)的表达式;(2)欲使系统稳定,试确定k 的取值范围。
答:(1)时域到频域2()(2)()6()3()s Y s k Y s Y s X s -++=,2Y(s)3H(s)=X(s)(2)6s k =-++。
(2)当2k =-时,极点在虚轴上,为临界稳定系统;当2k <-,极点在左半平面,为稳定系统。
2.如图7-2所示系统中,已知且(1)求子系统H 2(s);(2)欲使子系统H 2(s)为稳定系统,试确定k 的取值范围。
图7-2答:(1)如图221()()()()[()()()]()Y s E s Y s H s k E s Y s H s H s =+-+12121()()21()()()kH s H s H s kH s H s -==-+整理得,121()13()2[1()]2(3)kH s s K H s kH s s K +++==-+-(2)极点为k-3,当k-3<0时,系统稳定,即,K<3。
第8章系统的状态变量分析一、分析计算题1.如图8-1(a)所示电路系统,R=1Ω,L=0.5H,C=8/5F。
(1)求电路的输入阻抗Z(s),并画出Z(s)的零极点分布图。
(2)在u c(0)=0,i L(0)=0的情况下,使用开关s接通电流源i s(t),且i s(t)=ε(t)A,用拉普拉斯变换求U c(t)。
(3)以电源i s(t)为输入,以u c(t)、i L(t)为状态变量建立方程,求A、B矩阵和状态转移矩阵e At。
[北京理工大学研]图8-1解:(1)画出零状态下的s域电路模型,如图8-1(b)所示。
Z(s)有一个零点两个极点其零极点分布图如图8-1(c)所示。
(2)取逆变换,得(3)列写状态方程由KCL得由KVL得代入数值并整理,得故矩阵求状态转移矩阵解得λ1=-1+j0.5,λ2=-1-j0.5解上两式可得故2.下列是求系统响应y(n)的一段程序:列出相应的状态方程和输出方程。
[清华大学研]解:由程序可见,F和G为状态变量,分别设为λ1(n)和λ2(n),z为输入,Y为输出,分别表示为z(n)和y(n)。
则由程序得将式(1)代入式(3)得将式(1)代人式(2)得由式(5)(4)(1)可写出如下矩阵形式的状态方程和输出方程:3.如图8-2所示线性时不变离散因果系统的信号流图,f(k)为输入,y(k)为输出。
(1)判断该离散系统是否稳定?并说明理由。
(2)设状态变量x1、x2、x3如图中所标,试列出该系统的状态方程与输出方程。
[西安电子科技大学]图8-2解:(1)视原信号流图为两个子系统并联,设上半部分流图的系统函数为H 1(z),下半部分流图的系统函数为H 2(z)。
应用梅森公式得令H(z)分母多项式为A(z)=z 3-3z 2+7z-5,因1(1)()0z A A z ===,不大于零,由朱里准则判定该系统不稳定。
(2)观察流图,状态方程与输出方程分别为4.写出如图8-3所示系统的方程与输出方程。
第1章 信号与系统
一、填空题 1.设)12()(5
.0+-=-t e
t x t δ,则)(t x '=______。
[华中科技大学2008研]
【答案】)5.0(5.0)(-'='t t x δ 【解析】根据冲激函数的尺度变换,有
0.50.50.50.51()(21)0.5()21
0.5()2
1
0.5()
2
t t t t x t e t e t e t t δδδδ---=⎡
⎤=-+=-⎢⎥
⎣
⎦=-=-。
另解:
()()()()()()()
0.5
21,0.5=0=-21
=0.50.50.5t f t t t f t f t f t t f t
t δδδ='=-+=∴-⎡⎤⎣⎦'=-当时,,
得:
()10.52x t t δ⎛⎫
=- ⎪⎝⎭
所以)5.0(5.0)(-'='t t x δ。
2.()sin n t
dt t
ω∞
-∞=⎰______。
[天津工业大学2006研]
【答案】π
【解析】()111sin sin t n t n t
n t dt dn t Sa t dt t n t
ωωωωπω=∞
∞+∞-∞
-∞-∞===⎰⎰⎰令。
另解:
根据常用函数的傅里叶变换可知,
()()12Sa t g πω↔(2()g w 是τ为1的的矩形函数)
()()()1111
20
0j t Sa t dt Sa t e dt g ωωππ+∞
+∞
--∞
-∞
====⎰
⎰
3.已知一个可逆的LTI 系统可用方程[][]n
k y n x k =-∞
=
∑来描述,试求描述该系统的逆系
统方程为______,该逆系统的单位冲激响应为______,该逆系统是否稳定______。
[华南理工大学2011研]
【答案】[][][]1z n y n y n =--;[][]1n n δδ--;稳定 【解析】由[][]n
k y n x k =-∞
=∑可知,该系统任意两个相邻的输出值之差就是该系统的输
入值,即
[][][]1y n y n x n --=,因此其逆系统的方程是[][][]1z n y n y n =--。
又因为[][][][][][]{}
[][]1*1*z n y n y n y n n n y n h n δδ=--=--= 可知该逆系统的单位冲激响应为[][][]1h n n n δδ=--
[]h n 为有限长序列,则其收敛域包含整个坐标平面。
可见包含单位圆,则稳定。
二、选择题
1.用下列差分方程描述的系统为线性系统的是( )。
[西安电子科技大学研]
A .y (k )+y (k -1)=2f (k )+3
B .y (k )+y (k -1)y (k -2)=2f (k )
C .y (k )+ky (k -2)=f (1-k )+2f (k -1)
D .y (k )+2y (k -2)=2|f (k )| 【答案】C
【解析】线性系统具有叠加性和齐次性,设1122()()()()f t y t f t y t →→,,则有
1212()()()()af t bf t ay t by t +→+。
A 项,方程右边出现常数3;
B 项,方程左边出现y (k -1)y (k -2)项;
D 项,方程右边出现|f (k )|,这些都无法满足12()()af t bf t +→12()()ay t by t +的关系。
2.积分()()()(
)2
211t
t t dt δδ+∞-∞
'+-+-=⎡⎤⎣⎦⎰。
[西安电子科技大学研]
A .0
B .1
C .3
D .5 【答案】B 【解析】22=
(2)(1)(2)(1)t t dt t t dt δδ∞
∞
-∞
-∞
'+-++-⎰
⎰原式
22
1
1
(2)(2)231t t t t =='
=-+++=-+=。
三、判断题
两个周期信号之和一定为周期信号。
( )[北京邮电大学2012研]
【答案】×
【解析】两个周期信号之和不一定是周期信号,例如()()1cos 2f n n =,周期1N π=,
()()2cos ,f n n π=周期22N =,
12=2
N N π
为无理数,所以()()()12f n f n f n =+不是周期函数。
四、画图题
信号x (t )如图1-1所示,画出信号1
2()233y t x t ⎛⎫
=-+ ⎪⎝⎭
的图形。
[北京邮电大学2012研]
图1-1
解:()()⎥⎦
⎤
⎢⎣⎡--=2312t x t y 如图1-2(d )所示:
(a ) (b )
(c)(d)
图1-2。