第十章驱动轮防滑转控制系统
- 格式:ppt
- 大小:2.00 MB
- 文档页数:22

驱动防滑系统的工作原理驱动防滑系统是一种车辆动力控制系统,通过对车轮进行控制来提高车辆的稳定性和操控性。
该系统的工作原理是通过传感器监测车轮的转速和其他相关参数,然后根据这些数据来进行实时调整,从而防止车轮打滑。
驱动防滑系统主要由以下几个组件组成:传感器、控制单元、执行器和制动系统。
传感器负责监测车轮的转速和其他参数,如转向角度、加速度等。
控制单元则根据传感器提供的数据进行计算和判断,并发送指令给执行器。
执行器根据控制单元的指令来调整车轮的转速,以达到防止打滑的效果。
制动系统则作为辅助手段,在必要时使用制动力来控制车轮的转速。
具体来说,驱动防滑系统的工作原理如下:1. 车轮转速监测:传感器安装在每个车轮上,用于监测车轮的转速。
它们可以通过磁传感器、光传感器或者其他技术来实现。
传感器将监测到的转速数据发送给控制单元。
2. 控制单元计算:控制单元接收传感器发送的数据,并进行实时计算和判断。
它会比较不同车轮的转速,判断是否存在打滑情况。
如果发现某个车轮的转速明显高于其他车轮,就认为该车轮可能存在打滑,并采取相应措施。
3. 转速调整:控制单元根据计算结果,向执行器发送指令来调整车轮的转速。
执行器可以采用多种方式实现,如通过控制发动机输出功率、调整刹车压力等。
具体的调整方式取决于车辆的具体设计和驱动防滑系统的实现方式。
4. 制动辅助:在必要时,驱动防滑系统可以通过制动系统来辅助调整车轮的转速。
例如,在某个车轮出现打滑时,控制单元可以发送指令给制动系统,增加该车轮的制动力,以减少打滑情况。
总的来说,驱动防滑系统通过监测车轮的转速和其他参数,实时计算并判断车轮是否存在打滑情况,然后通过调整车轮的转速来防止打滑。
这种系统可以提高车辆的稳定性和操控性,减少在低摩擦路面或急刹车时的打滑风险,提高车辆的安全性和可靠性。
需要注意的是,驱动防滑系统并不能完全消除车辆打滑的可能性,它只能在一定程度上减少打滑风险。
此外,不同车辆的驱动防滑系统可能会有不同的实现方式和性能表现,具体效果会受到车辆设计、传感器精度、控制算法等多种因素的影响。
一文了解驱动轮防滑转调节技术(ASRTCSTRC)汽车在起步、加速或冰雪路面上行驶时,容易出现打滑现象。
这是因为汽车发动机传递给车轮的最大驱动力是由轮胎与路面之间的附着系数和地面作用在驱动轮上的法向反力的乘积(即附着力)决定的。
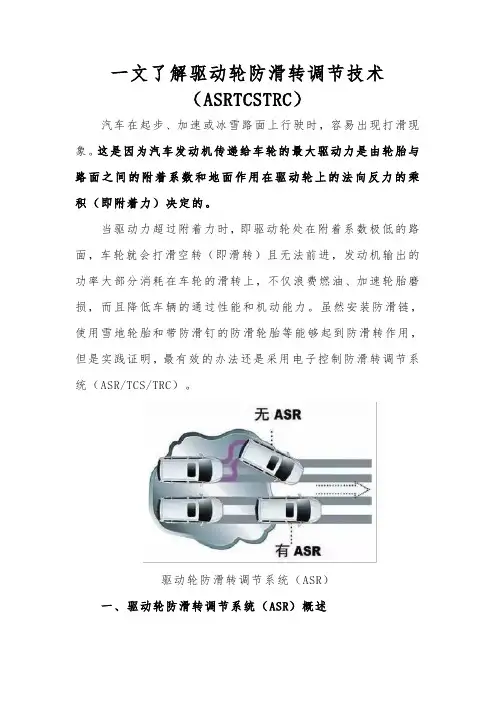
当驱动力超过附着力时,即驱动轮处在附着系数极低的路面,车轮就会打滑空转(即滑转)且无法前进,发动机输出的功率大部分消耗在车轮的滑转上,不仅浪费燃油、加速轮胎磨损,而且降低车辆的通过性能和机动能力。
虽然安装防滑链,使用雪地轮胎和带防滑钉的防滑轮胎等能够起到防滑转作用,但是实践证明,最有效的办法还是采用电子控制防滑转调节系统(ASR/TCS/TRC)。
驱动轮防滑转调节系统(ASR)一、驱动轮防滑转调节系统(ASR)概述汽车防滑转调节系统(ASR,Anti-Slip Regulation System)又称为加速滑移调节系统(Acceleration Slip Regulation System),因为防止驱动轮滑转能够通过调节驱动轮的驱动力(牵引力)来实现,故又称为牵引力控制系统(TCS 或TRC,Traction Force Control System)。
驱动(轮)防滑系统(ASR)是车辆重要的主动安全技术之一,其功能是防止车辆在大加速度/低附着路面工况下轮胎过度滑转,提高车辆的安全性。
驱动轮防滑转调节系统ASR作用:在车轮开始滑转时,降低发动机的输出转矩来减小传递给驱动轮的驱动力,防止驱动力超过轮胎与路面之间的附着力(或通过增大滑转驱动轮的阻力来增大未滑转驱动轮的驱动力,使所有驱动轮的总驱动力增大),从而提高车辆的通过性。
汽车ASR控制效果图ASR与ABS密切相关,都是汽车的主动安全装置,两个系统通常同时采用。
ABS的作用是自动调节(增大或减小)制动力,防止车轮抱死滑移,提高汽车的制动性能;ASR的作用是维持附着条件,增大总驱动力,防止车轮抱死滑转,提高汽车的通过性。
二、驱动轮防滑转调节系统(ASR)基本原理驱动(轮)防滑系统是根据驱动轮和传动轮的转数来判定驱动轮是否发生打滑现象,进而抑制驱动轮转速的一种防滑控制系统,是一套基于ABS系统一起对有滑转趋势的驱动轮进行控制的系统。
子任务2驱动防滑控制系统(ASR)故障检修
一、资讯
1.ASR有哪些作用?
2.驱动轮的滑转程度用滑转率S表示,其表达式为:,当时,滑转率s=0,车辆处于状态;当时,滑转率s=100%,车辆处于状态;当时,滑转率0<s<100%,车辆处于状态。
在各种路面上当滑转率或滑移率为左右时,附着系数达到最大值。
3.驱动轮防滑转控制方法有哪些?
4.ASR系统的基本组成如图所示,由传感器、电子控制模块(ECU)、执行器、驱动车轮制动器等组成,其传感器有、;执行器有、。
二、计划与决策
请根据检查ASR故障诊断与排除的方法和更换要求,确定所需要的工具,并对小组成员进行合理分工,制定详细的检查和更换计划。
1.需要的工具
2.小组成员分工
3.检查和维修计划计划
三、实施
1.情境模拟,角色扮演客户与服务顾问,进行接车环节演练。
2.环车检查,记录车辆基本信息:
车辆品牌型号:
车辆VIN号码:
车辆行驶里程:
车辆外观检查记录
3.初步检查
1)使用专用解码器读取故障码
专用解码器型号为:
故障码为:有何含义:2)读取数据流并记录
4.识读电路图,并画出与ASR相关的电路图
5.查找维修手册制定维修计划
6.整理工位
收回翼子板布和前格栅布,关闭发动机舱盖;收回五件套,清洁车辆、清洁地面卫生,处理废弃物。
四、评价
知识评价
1.现场问答题:
(1)ASR与ABS有什么异同?
(2)ASR的控制方式有哪些?
(3)描述ASR故障检修流程。
技能及素养评价。
汽车底盘电控技术(题库版)1、判断题为保证汽车转向时的各个车轮作纯滚动,应使内转向轮偏转角大于外转向轮的偏转角。
正确答案:对2、单选在自动变速器的液压控制系统中,副调压阀的用途之一是()。
A.保(江南博哥)持液力变矩器内有较稳定的油压B.直接控制节气门油压C.直接控制车速油压D.保持储压器有较稳定的背油压正确答案:A3、判断题自动变速器的N位为空挡位。
此时行星齿轮系统空转,不能输出动力。
()正确答案:对4、单选自动变速器的控制系统中,制动带的工作是由()驱动的。
A.背油压B.机械反作用力C.液压D.电力正确答案:C5、问答题何为自诊断法?故障码的提取方法通常有哪些?正确答案:自诊断法就是指利用自诊断系统的故障码来确定部位的方法。
故障码的提取方法有两种,一是借助汽车电脑解码器从汽车电控单元的专用输出接口提取;二是人工提取。
6、单选防滑控制根据驱动轮的滑移量,通过电子控制装置来控制发动机转速和汽车制动力进行工作;或按照左、右车轮的转速差来控制转矩,并与制动器相结合最优分配驱动轮驱动力的差速器为()。
A.强制锁止式B.自动锁止式C.湿式差速器D.主动防滑差速器正确答案:C7、单选在行星齿系机构中,单行星齿排总共能提供()种不同的传动比。
A.3B.5C.6D.7 正确答案:D8、问答题什么是液力变矩器的失速转速?正确答案:当汽车起步时,转速比为0,泵轮与涡轮的转速差最大,此时涡轮输出的转矩最大,足以克服静态阻力矩,是汽车顺利起步,在液力变矩器曲线上此时对应的点叫失速点,该点对应的发动机转速叫失速转速。
9、判断题在一般的自动变速器中,一组共用太阳齿的辛普森行星齿系,可提供两个前进档和一个倒档。
()正确答案:错10、判断题当涡轮转速等于泵轮转速时,液力偶合器的效率为100%。
()正确答案:错11、单选液控自动变速器利用()反映发动机的功率。
A.真空调节器B.节气门油压阀C.节气门位置传感器D.发动机转速传感器正确答案:B12、单选甲说:强制降档电磁阀卡滞在降档端,变速器便不能升档。

简述驱动轮防滑转的控制方法
驱动轮防滑转的控制方法主要是通过传感器检测车辆的轮胎滑动
情况,再通过控制车辆的制动系统或发动机输出功率来调节车轮的转速,达到防止车轮滑动的目的。
具体的控制方法包括以下几种:
1. 利用车轮速度传感器来检测轮胎滑动情况,并通过ABS系统
控制车轮刹车压力,防止车轮滑动。
2. 利用车轮传感器检测轮胎转速,当发现车轮转速过快时,通
过发动机控制系统降低发动机输出功率,以减少轮胎的旋转力矩,从
而防止车轮滑动。
3. 在车辆转向时,通过差速器控制车辆左右轮胎的转速差异,
以使车辆更好地适应路况变化,防止车轮滑动。
4. 在某些情况下,如起步或越野行驶时,可以通过电子控制系
统来控制车辆的扭矩分配,以保持车轮的牵引力,防止车轮滑动。
总之,驱动轮防滑转的控制方法是通过不同的控制器和传感器来
实现,以调节车轮的转速和功率输出,防止车轮滑动,保证行车安全。


四轮驱动汽车驱动防滑控制系统的设计摘要驱动防滑控制系统ASR的基础是ABS,是在ABS 为基础上的延伸,ABS 和ASR 统称为防滑控制系统。
驱动防滑控制系统通过调节作用于驱动轮的驱动力矩来控制驱动轮的滑转率,从而使汽车的操纵性、横向稳定性、动力性以及燃油经济性都得到提高。
四轮驱动汽车与二轮驱动汽车相比,因为其每个轮胎所受的驱动力只有二轮驱动汽车的一半,故具有更好的越野性能,然而,四轮驱动汽车本身存在许多不足,比如:短时四轮驱动汽车操作繁琐;常时四轮驱动汽车由于前后驱动桥之间以及左右驱动轮之间通过差速器连接,只要一个车轮处于低附着系数路面上时,整车驱动力几乎丧失。
将驱动防滑控制系统用于四轮驱动汽车将有可能解决四轮驱动汽车打滑的问题。
本文主要从轮胎的滑转以及整车的动力性等方面来分析驱动防滑控制系统对于四轮驱动汽车的影响,主要内容包括以下几个部分:1、分析四轮驱动汽车的驱动特点,制定出四轮驱动汽车驱动防滑控制系统的控制策略。
通过调节发动机的输出扭矩以及控制制动器来控制车轮的相对滑转。
原始输入参考模型车发动机输出数据。
2、建立四轮驱动汽车驱动的简化数学模型。
本文主要为控制算法的研究,故数学模型可适当简化,并将汽车行驶的条件设置为相对简单的路面情况。
3、进行ASR 系统的控制算法研究。
并主要探讨了模糊控制在四轮驱动汽车ASR 系统上的应用。
分别设计了发动机输出扭矩控制器和制动力矩模糊控制器。
4、根据所建立的数学模型在MATLAB/SIMULINK 环境下建立仿真模型,并进行了不同路面上的仿真分析。
仿真结果表明驱动防滑控制系统对于四轮驱动汽车的驱动轮滑转起到了较好的抑制作用,并且使得四轮驱动汽车的动力性得到一定的提高,同时也验证了控制策略的正确性以及控制算法的可行性。
关键词:驱动防滑;四轮驱动;轮胎模型;MATLAB仿真;模糊控制AbstractAcceleration slip regulation (ASR) was developed based on Anti-lock Brake System (ABS). It is the extension of ABS to the driving course. So ABS and ASR are called a control system preventing slide by a joint name. ASR can control the slippages of the driving wheels by adjusting the driving moments acting on the driving wheels. Accordingly improves the handling performance、transverse stability、dynamic performance and economics.Four wheel drive vehicle has better cross-country performance than two wheel drive vehicle. So it usually passes for SUV. However, four wheel drive vehicle has many shortages. To drive a short-time four wheel drive vehicle is very troublesome. Because the front and rare driving bridges of a long-time four wheel drive vehicle are connected through a differential as well as the left and right driving wheels, certain wheel on the road with low coefficient of friction will result in else wheels’ driving power descend much, so th e power to drive the car become almost zero. ASR can possibly solve the four wheel drive vehicle’s problem of slip. So this paper mainly analysis the ASR’s effect on the four-wheel-drive vehicle from the angle of dynamic performance. This paper mainly includes several parts as follows:1. The control strategies were set down by analysis the character of four wheel drive vehicle when driving. That is, the exceed slips of driving wheels are regulated by controlling the gun, and the relative slips of driving wheels are regulated by controlling the brake. The means of estimating the vehicle’s velocity used on the ABS was used for reference.2. The mathematic model of a four wheel drive vehicle was established. Establish a simple 、convenience、obvious、accurate systems mathematic model. In this paper, the model of the system was established and the state-space of the system was deduced.3. Made some researches of the ASR’s control algorithms. Then discuss the application of fuzzy control means on the ASR of four wheel drive vehicle. The gun controller and brake controller were designed.4. The simulation model was established under the circumstance of MATLAB/SIMULINK according to the established mathematic model. And three different road conditions were simulated and analysis. The results of simulation have shown that ASR can effectively regulated the driving wheels’ slippages, furthermore, the dynamic performance be improved. At the same time, it proved the control strategies were correct and the control algorithms were feasible.Keywords: acceleration slip regulation, four wheel drive; bond graph, simulation, fuzzy control目录摘要 (I)Abstract .............................................................................................................. I I第1章绪论 (1)1.1 课题背景及研究的目的和意义 (1)1.1.1 ASR的由来 (1)1.1.2 ASR的发展历程 (2)1.2 四轮驱动汽车的驱动防滑及其相关理论的发展 (4)1.2.1 四轮驱动原理 (4)1.2.2 四驱汽车的驱动防滑 (5)1.3 ASR在我国的现状及本课题研究的内容 (6)1.3.1 ASR在我国的发展现状 (6)1.3.2 ASR研究中的关键技术 (6)1.3.3 本课题的主要研究内容 (7)第2章ASR的基本原理及控制策略的研究 (9)2.1 ASR的基本原理及其基本结构 (9)2.2 四轮驱动汽车的ASR控制策略的研究 (10)2.2.1 控制实现的方法 (10)2.2.2 控制策略的选择 (11)2.2.3 控制量的选择 (13)2.3 模型汽车参数的确定 (13)2.4 本章小结 (14)第3章汽车运动模型建立 (15)3.1 轮胎力学模型 (15)3.2 制动系统模型 (17)3.3 滑转率的计算模型 (17)3.4 驱动力矩的分配模型 (18)3.5 汽车整车模型的建立 (20)3.6 本章小结 (21)第4章模糊控制器的设计 (23)4.1 模糊控制方法 (23)4.1.1 模糊控制的基本思想及模糊系统的构成 (23)4.1.2 模糊控制的基本原理 (24)4.2 模糊控制器的设计 (25)4.2.1 模糊控制器结构的设计 (25)4.2.2 精确量的模糊化 (25)4.2.3 输出信息的模糊判决 (29)4.3 模糊系统的建模 (30)4.4 本章小结 (30)第5章不同路面情况下的仿真及结果分析 (31)5.1 ASR的控制器模型 (31)5.2 仿真以及结果分析 (34)5.2.1 汽车模型的检验 (34)5.2.2 增加了驱动防滑系统的汽车模型 (36)5.2.3 以复杂输入参数进行仿真 (37)5.2.4 ASR控制下的仿真 (39)5.2.5 将路面情况设定为普通路面的仿真 (42)5.3 本章小结 (43)结论 (44)参考文献 (46)第1章绪论1.1 课题背景及研究的目的和意义1.1.1 ASR的由来汽车技术在近一个世纪以来得到了快速的发展和提高,目前,ABS 对于大众来说已经是一个很熟悉的名词了。