被动式升沉补偿系统
- 格式:doc
- 大小:21.00 KB
- 文档页数:1
摘要海洋石油浮式钻采平台是海洋油气开发的重要装备,升沉补偿装置系统作为海洋浮式钻井平台的关键设备之一,对钻井效率和安全以及钻井设备的使用寿命起着决定作用。
本篇文章对国内外海洋钻井管柱升沉补偿系统的技术现状做出介绍,对钻杆柱补偿和隔水管补偿装置结构和工作原理原理进行了详细研究,综合对比分析各升沉补偿装置的技术特点,最后探讨了我国升沉补偿系统的发展趋势,进而对我国海洋石油钻井升沉补偿系统的未来发展方向提出若干建议。
关键词海洋钻井;升沉补偿系统;钻杆柱补偿;隔水管系统补偿;发展趋势1.升沉补偿系统简介海洋石油浮式平台钻井系统是海洋油气开发的关键装备,我国海洋石油装备产业在海洋油气产业持续发展的带动下正处于高速发展的新时期[1,2]。
在深水浮式钻井船或半潜式钻井平台作业中,其在海上处于漂浮状态。
在风浪作用下,钻井平台作平移、摇摆、以及上下升沉运动。
随波浪周期性上下升沉的运动将引起钻杆柱和隔水管系统周期性的上下运动。
钻杆柱周期性上下运动将使大钩拉力增大或减小,直接影响井底钻压的变化。
井底钻压的变化不利于钻进,而且当钻压降到一定限度时,将使钻头脱离井底,无法持续钻进。
隔水管系统周期性上下运动将使其失效或井口装置脱离井底。
为此,要保证正常钻进,提高钻井效率,就必须采用升沉补偿系统对升沉进行补偿,以减少钻杆柱和隔水管系统与海底的相对运动,并保持恒定的张力载荷。
升沉补偿系统作为海洋浮式钻井平台的关键设备之一,不仅能够减少等候天气的时间,提高钻井效率和安全性,而且能够延长钻井设备的使用寿命。
海洋钻井升沉补偿装置作为浮式平台钻井系统中的一个重要单元设备,其技术在欧美等发达国家的平台配套当中已相当成熟,长期以来其技术一直被国外发达国家所垄断,如挪威Hydralift公司设计和生产的各种型式升沉补偿系统[5]。
而我国由于自身工业基础条件比较薄弱,加之起步晚,所以在该技术尤其是隔水管升沉补偿技术的研究开发方面处于起始阶段。
拖体被动升沉补偿系统非线性建模及仿真
拖体被动升沉补偿系统是一种非线性的控制系统,它具有复杂的
特征,实施起来也非常困难。
简而言之,这种系统通过浮力、拖力的
相互协调及精确的控制,实现对船舶的位置和航向的控制。
非线性建
模及仿真手段,是用来研究该系统特性、性能及其控制规律的一种重
要方法。
仿真拖体被动升沉补偿系统,首先要建立包括拖体及其他相关元
件的物理模型,用于表示整个系统的质量、动力以及环境影响等因素;其次,要建立一个有效的非线性控制策略模型,用于指导系统的运动;最后,要建立一个浮力和拖力的动力学耦合模型,用于表达拖体的水
动力特性。
在非线性建模及仿真过程中,除了使用传统的工程方法和数值技
术外,还可以利用专门的仿真软件,如 MATLAB/Simulink 仿真,ADAMS 结构分析,ABAQUS 结构分析等,来实现拖体被动升沉补偿系统
的三维仿真。
与传统的数值计算模型相比,这种技术可提供更多的模
拟细节,更好地描述系统特性、动力学效果及行为模式,从而更好地
理解和评估拖体被动升沉补偿系统的性能。
在非线性建模及仿真实践中,还可以根据实测数据和应用部分,
采用正确的设计及分析技术,考虑仿真环境、运动状态、分布特性及
控制策略等要素,进行有效的拖体被动升沉补偿系统技术测试及仿真
评估。
分析结果对于拖体被动升沉补偿系统的项目开发至关重要,为
系统的建造、安装和使用提供重要参考。
深海采矿被动升沉补偿系统参数设计与仿真研究的开题报告一、研究背景随着深海采矿技术的不断发展,深海矿产资源的开采已经成为国际上热门的研究领域。
由于深海环境的特殊性,深海采矿设备必须具备很高的稳定性和安全性。
而深海采矿被动升沉补偿系统作为深海采矿设备中的关键技术之一,能够有效提高采矿设备的稳定性和安全性,在深海采矿的实际应用中具有重要的意义。
二、研究目的本研究旨在设计一种深海采矿被动升沉补偿系统的参数,并进行仿真研究,从而探究该系统在深海采矿中的应用效果。
三、研究内容1. 分析深海采矿被动升沉补偿系统的基本原理,研究其关键技术和性能指标;2. 设计深海采矿被动升沉补偿系统的参数,包括质量和刚度等;3. 利用仿真软件对设计的被动升沉补偿系统进行建模和仿真分析,探究其在深海采矿中的应用效果;4. 评价被动升沉补偿系统的性能指标,并提出改进意见和建议。
四、研究意义本研究通过深入分析和探究深海采矿被动升沉补偿系统的参数设计和仿真研究,有助于进一步完善深海采矿设备的安全性和稳定性,提高深海矿产资源的开采效率和质量,具有重要的理论和实际意义。
五、研究方法本研究采用文献调研、理论分析和仿真研究相结合的方法。
具体包括:查阅有关深海采矿被动升沉补偿系统的文献资料,分析系统的基本原理和性能指标;设计被动升沉补偿系统的参数,分析系统结构和特点,确定系统的质量和刚度等参数;利用仿真软件对被动升沉补偿系统进行建模和仿真分析,并评价其性能指标。
六、预期成果1. 深入掌握深海采矿被动升沉补偿系统的基本原理和性能指标;2. 设计一种深海采矿被动升沉补偿系统的参数,并进行仿真研究;3. 评价仿真结果,提出改进意见和建议。
七、进度安排本研究预计时限为6个月,研究进度安排如下:第1-2个月:文献调研和基本原理分析;第3-4个月:参数设计和建模仿真;第5个月:仿真结果评价和分析;第6个月:撰写论文和完善工作。
八、参考文献1. 吴志华. 深海采矿被动升沉补偿系统的仿真研究[J]. 机械制造与自动化, 2018(1):34-38.2. 严志伟, 魏勒. 深海采矿被动升降系统的研究[J]. 科技视界, 2019(3):22-25.3. 王瑞, 黄明. 深海采矿被动升降系统的性能优化[J]. 深海工程, 2020(4):11-14.。
船用起重机主被动式升沉补偿系统的建模王哲骏;罗友高;谢金辉;邓智勇【摘要】在海上利用起重机转运货物时,为了使被吊货物在垂直方向保持在一定的位移范围,配备升沉补偿系统是十分必要的.文中介绍了主被动式升沉补偿系统的工作原理,根据设计要求建立了主被动式补偿系统的数学模型,对补偿系统中的液压缸直径、蓄能器总容积、比例阀最大最小流量等主要参数进行了分析计算,并对设计的补偿系统负载位移变化进行了仿真.仿真结果表明,该系统能够对负载起到补偿作用,对系统设计能够起到理论指导作用.【期刊名称】《机械工程师》【年(卷),期】2015(000)007【总页数】4页(P57-60)【关键词】升沉补偿;复合油缸;船用起重机【作者】王哲骏;罗友高;谢金辉;邓智勇【作者单位】武汉第二船舶设计研究所,武汉430064;武汉第二船舶设计研究所,武汉430064;武汉第二船舶设计研究所,武汉430064;武汉第二船舶设计研究所,武汉430064【正文语种】中文【中图分类】U653.9210 引言海上舰船或者平台之间在进行吊装作业时,由于海浪起伏的影响,作业船舶或平台会随波浪上下运动,船体或平台的突然下沉会造成下放中的货物与支持面发生碰撞,或已放落到地面上的货物由于船体的突然上升出现再次悬空的现象[1]。
这些影响都有可能对货物或者起重机造成损伤,为了使海上吊放作业能平稳有效地进行,配备升沉补偿系统是很有必要的[2]。
升沉补偿技术作为海洋装备物品吊放、海上石油钻采和海上设备布放回收等作业中的重要技术,在世界范围内已经得到了广泛的应用和深入的研究。
德国博世力士乐公司推出基于二次液压元件以及复合油缸的多功能主被动式补偿系统;荷兰Huisman公司其海上桅杆式起重机配备了主动式风浪补偿系统,起升能力能达到300t。
国内上海交通大学的对被动式ROV深海吊放回收装置进行了研究[3],中南大学的刘少军[4]以及广东工业大学的肖体兵等[5]对深海采矿装置升沉补偿系统进行了研究。
第17卷 第11期 中 国 水 运 Vol.17 No.11 2017年 11月 China Water Transport November 2017收稿日期:2017-09-01作者简介:田烈余(1981-),男,硕士,广州海洋地质调查局工程师,主要研究方向为水下机器人和液压系统等。
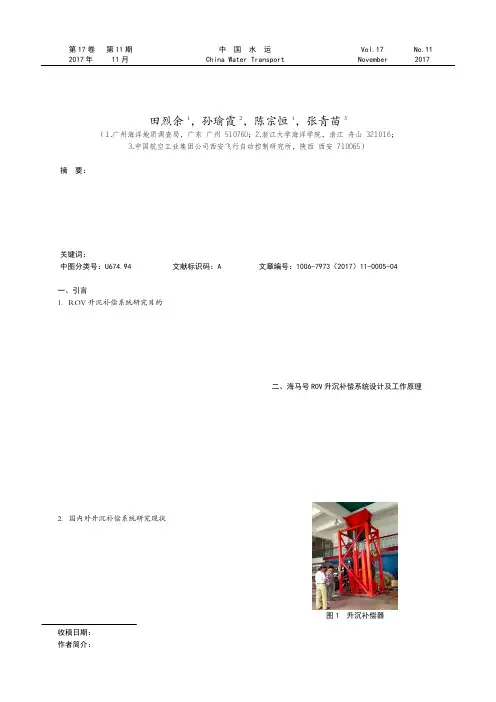
海马号ROV 升沉补偿系统张力与压力特性研究田烈余1,孙瑜霞2,陈宗恒1,张青苗3(1.广州海洋地质调查局,广东 广州 510760;2.浙江大学海洋学院,浙江 舟山 321016;3.中国航空工业集团公司西安飞行自动控制研究所,陕西 西安 710065)摘 要:“海马”号4,500m 级无人遥控潜水器(ROV)是国家“863计划”重点项目“4,500m 级深海作业系统”的主要研究成果,是我国自主研发的第一套大深度 ROV 系统,最大工作水深4,500m,主要作业功能是进行海底探测、取样以及其他水下作业。
在工作过程中,为防止母船在波浪作用下产生升沉运动通过主脐带传递到吊放的 ROV 等水下设备,研制一套升沉补偿系统以减小升沉耦合运动传导、吸收加速度动力、减少脐带松弛,以改善 ROV 运动控制条件、防止脐带缆破坏、提高系统作业安全性。
本文参考了国内外升沉补偿系统的设计方案并进行了比较,介绍了所设计的被动式升沉补偿器的主要组成部分,通过建立模型、分析计算、以及实验的方式对升沉补偿系统进行了力学特性研究。
关键词:“海马号”ROV;升沉补偿系统;工作特性;测试实验中图分类号:U674.94 文献标识码:A 文章编号:1006-7973(2017)11-0005-04一、引言1.ROV 升沉补偿系统研究目的海洋探查和资源开发利用、深海观测和研究计划的开展,需要大量的深海设备线缆布放、检测和维护作业,这极大地依赖在水下工作时间长、作业能力强、负载能力大的无人遥控潜水器(ROV)。
因此,国家“863计划”提出了自主研制“4,500m 级深海作业系统”。