1 sn
F(s)
n
(2.15)
第二章 线性系统的数学描述
4) 初值定理 函数f(t)在t=0时的函数值可以通过f(t)的拉氏变换F(s)乘 以s取s→∞时的极限而得到, 即
lim f (t) f (0) lim sF(s)
t 0
s
(2.16)
第二章 线性系统的数学描述
5) 终值定理 函数f(t)在t→+∞时的函数值(即稳定值)可以通过F(s)的 拉氏变换F(s)乘以s取s→0 时的极限而得到, 即
c(0) c(0) c(0) c(n1) (0) 0 r(0) r(0) r(0) r(m1) (0) 0
则根据拉氏变换的定义和性质,对式(2.18)进行拉氏变换, 并令 C(s)=L[c(t)], R(s)=L[r(t)],可得
[a0sn a1sn1 an1s an ]C(s) [b0sm b1sm1 bm1s bm ]R(s)
第二章 线性系统的数学描述
2.1.1 电气系统
电气系统中最常见的装置是由电阻、电容、运算放大器等元 件组成的电路, 又称电气网络。我们将电阻、电感和电容等本身 不含有电源的器件称为无源器件,而将运算放大器这样本身包含 电源的器件称为有源器件。仅由无源器件构成的电气网络称为无 源网络;如果电气网络中含有有源器件或电源, 就称之为有源网 络。
第二章 线性系统的数学描述
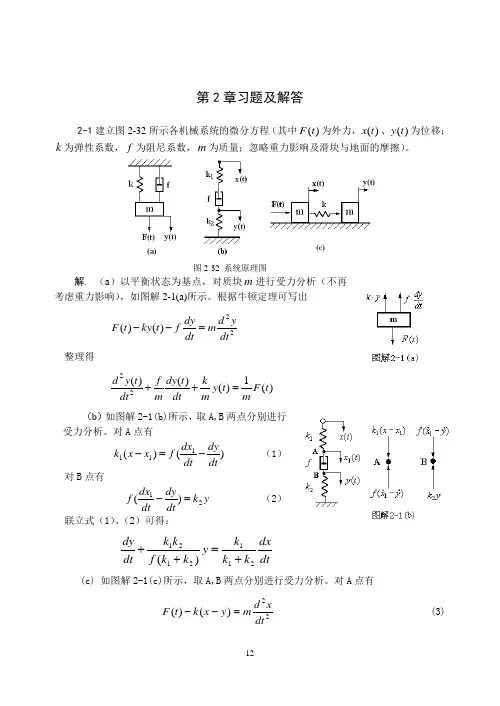
2.1.2 机械系统
【例 2-3】 图2-3表示一个含有弹簧、运动部件、阻尼器 的机械位移装置。其中k是弹簧系数,m是运动部件质量,μ是阻 尼器的阻尼系数;外力f(t)是系统的输入量,位移y(t)是系统的 输出量。试确定系统的微分方程。
解 根据牛顿运动定律, 运动部件在外力作用下克服弹簧拉