驱动程序的接口设计
- 格式:doc
- 大小:25.50 KB
- 文档页数:2
引言WDM是“Windows驱动程序模型”的简称,即“Windows Driver Model”。
实际上它是一系列集成在操作系统之中的常规系统服务集,用于简化硬件驱动程序的编写,并保证它们在Windows 98/Me/2000中的二进制兼容,WDM(Windows Driver Model)模型是从WinNT3.51和WinNT4的内核模式设备驱动程序发展而来的。
WDM主要的变化是增加了对即插即用、电源管理、Windows Management Interface(WMI)、设备接口的支持。
WDM模型的主要目标,是实现能够跨平台使用、更安全、更灵活、编制更简单的Windows 设备驱动程序。
WDM采用了“基于对象”的技术,建立了一个分层的驱动程序结构。
WDM 首先在Windows98中实现,在Windows2000中得到了进一步的完善,并在后续开发的Windows操作系统中都将存在,比如Windows Me和Windows XP。
微软在通过WDM 模型的引入,希望减轻设备驱动程序的开发难度和周期,逐渐规范设备驱动程序的开发,应该说,WDM将成为以后设备驱动程序的主流。
USB技术的全称是通用串行总线,是英文Universal Serial Bus的缩写。
它是一种应用在PC领域的新型接口技术,虽然USB2.0已经被广泛应用,但是初始的Windows 2000是支持USB1.0协议的,如果希望支持USB2.0协议,需要在微软网站上下载升级包。
实际上,对于键盘或者鼠标来说,传输的速度非常小,使用USB1.0或者是USB2.0的区别并不大。
闪存盘之类的存储设备,则需要重视传输速度。
USB1.0版本主要应用在鼠标,键盘等HID设备上,这就是本驱动程序中引用的头文件版本是USB1.0的原因。
本毕业设计的目的是希望对Windows 2000操作系统体系结构和驱动程序开发以及调试等方面的问题有一个比较深入的了解,对USB协议和USB体系有做一个比较深入的了解。
USB 接口驱动程序开发1 引言随着微机技术水平的日益提高,传统的计算机接口已经不能满足当前计算机高速发展的需求,计算机业迫切需要一种新的通用型、高速总线接口,通用外设接口标准USB 就应运而生。
USB,全称是Universal Serial Bus(通用串行总线),是一种新型的、基于令牌的、高速的串行总线标准,由Compaq、Microsoft、Intel、IBM 等七家公司共同开发的, 旨在解决日益增加的PC 外设与有限的主板插槽和端口之间的矛盾而制定的一种串行通信标准[3],自1995年在Comdex 上亮相以来已广泛地为各PC 厂家支持。
现在市场上几乎所有的P C 机器都配备了US B 接口,USB 接口之所以能够得到广泛支持和快速普及,是因为它具备以下优点:正由于上述优点, 开发USB 接口的设备已成为一种发展趋势。
然而随着USB 技术的迅猛发展, 传统的USB1 . 1 接口已经不能适应用户的需求, 于是在1 9 9 9年在I nt e l 的开发者论坛大会上又提出了USB2 . 0 技术, 使得US B 不仅支持1 . 5Mb / s 的“低速”, 传输和12Mb/s 的“全速”传输,而且支持480Mb/s 的“高速”传输,比USB1.1 标准快40 倍左右,速度的提高对于用户的最大好处就是意味着用户可以使用到更高效的外部设备, 而且具有多种速度的周边设备都可以被连接到USB 2.0 的线路上,而且无需担心数据传输时发生瓶颈效应。
2 USB 驱动程序设计一个完整的USB 系统包括主机系统包括主机系统和USB 设备。
所有的传输事务都是由主机发起的。
一个主机系统又可以分为以下几个层次结构, 。
USB 总线接口包括USB 主控制器和根集线器,其中USB 主控制器负责处理主机与设备之间电气和协议层的互连,根集线器提供USB 设备连接点。
USB接口驱动程序的设计与开发的开题报告一、选题背景及意义随着电脑科学与技术的不断发展,USB(Universal Serial Bus,通用串行总线)接口已成为当前大多数电子设备间数据传输的标准接口。
USB接口的广泛应用使得USB驱动程序的研发成为电脑及其相关应用领域的一个重要研究领域,它的研究和发展直接关系到相关产品的性能和使用体验。
因此,对USB接口驱动程序的设计与开发进行研究,具有较高的现实意义和应用价值。
二、选题研究目标本次选题旨在通过对USB接口的了解,掌握USB驱动程序的设计与开发技术,研究其开发方法和设计原理,理解USB协议栈的架构,进而实现USB设备的驱动程序的编写。
三、选题研究内容1. USB接口原理的研究:包括USB1.1、USB2.0、USB3.0等通信协议的研究。
2. USB驱动程序的设计与开发技术:包括USB驱动程序的设计思路、开发工具的使用、代码实现等技术方面的研究。
3. USB协议栈的架构:分析USB协议栈的结构和功能,建立各个层次之间的关系,了解USB驱动程序在协议栈中的作用和位置。
4. USB设备驱动程序的编写:当理解了USB接口的基本原理和协议栈的架构之后,考虑如何编写本地的USB设备驱动程序。
四、研究计划第一阶段:论文撰写(2021年5月-2021年6月)1. 阅读相关文献,了解USB接口的基本原理及USB驱动程序的设计与开发技术;2. 完成选题开题报告、选题计划、开题答辩等任务;3. 撰写USB接口驱动程序的设计与开发的开题报告。
第二阶段:技术方案和程序开发(2021年6月-2021年10月)1.了解USB驱动程序开发的基本流程和编程方法,熟悉USB协议栈的架构;2. 分析USB设备的通信协议,确定驱动程序的功能;3. 根据USB设备的架构、驱动程序的功能设计程序框架,实现设备驱动程序;4.利用开发板搭建实验环境,验证驱动程序的正确性和稳定性。
第三阶段:论文撰写与答辩(2021年10月-2021年12月)1.修改论文初稿,完善内容,注重论文的书写规范和语言表达能力;2. 准备开题答辩资料,准备论文答辩所需材料;3.参加开题答辩及论文答辩,最终完成毕业论文的撰写和答辩。
嵌入式系统中的外设驱动与接口设计嵌入式系统是一种特殊的计算机系统,它被嵌入到其他设备中,用于控制、交互和管理设备的各种功能。
外设驱动和接口设计是嵌入式系统中非常重要的一部分,它决定了嵌入式系统与外部设备之间的通信和互动方式。
本文将重点介绍嵌入式系统中外设驱动与接口设计的一些关键概念和技术。
外设驱动是用于控制和操作外部设备的软件模块。
不同类型的外设(如显示器、键盘、传感器等)需要不同的驱动程序来实现其功能。
嵌入式系统的外设驱动程序通常由操作系统或应用软件提供。
外设驱动的设计需要考虑设备的特性和功能要求,同时与底层硬件交互以实现对外设的控制和数据传输。
在嵌入式系统中,外设驱动的编程语言通常是汇编语言或C语言。
汇编语言提供了对底层硬件的直接访问,可以精确地控制外设的各种功能。
C语言相对高级一些,可以更方便地编写和维护外设驱动程序。
在实际开发中,根据外设的复杂程度和性能要求,可以选择合适的编程语言来编写外设驱动程序。
外设驱动的设计通常需要考虑以下几个方面。
首先是外设的初始化。
外设初始化是外设驱动程序的一部分,它用于配置外设的工作模式、通信协议和参数等。
其次是外设的读写操作。
外设的读写操作是通过与外设之间的接口进行数据传输来实现的。
外设驱动程序需要实现数据的读取和写入功能,以满足系统对外设的不同需求。
再次是外设的中断处理。
外设的中断是指外设在工作过程中发生的事件,在这些事件发生时,外设驱动程序需要及时响应并处理相应的中断请求。
最后是外设的关闭和资源释放。
外设使用完毕后,外设驱动程序需要关闭外设并释放相应的资源,以避免资源浪费和冲突。
除了外设驱动之外,嵌入式系统中还需要设计合适的接口来连接嵌入式系统和外设。
接口设计的关键是确定通信协议和电气特性,以确保嵌入式系统和外设之间的可靠和稳定的数据传输。
在接口设计中,需要考虑以下几个重要因素。
首先是通信协议。
通信协议定义了数据的格式、传输规则和协议控制等内容。
常见的通信协议包括串口、SPI(串行外设接口)、I2C(两线串行总线)和USB (通用串行总线)等。
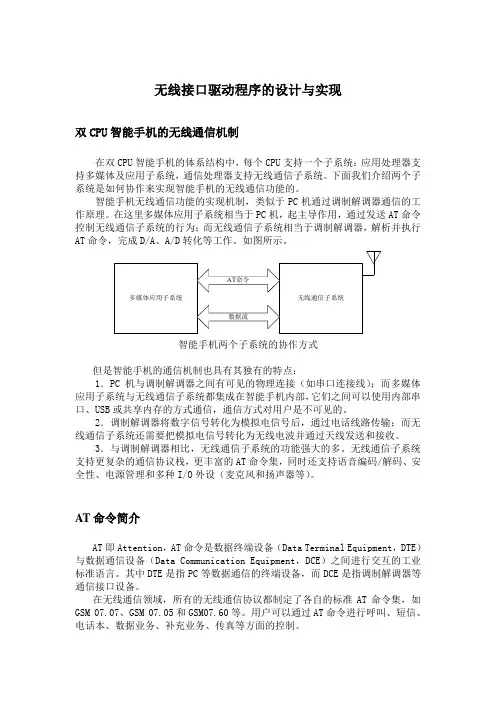
无线接口驱动程序的设计与实现双CPU智能手机的无线通信机制在双CPU智能手机的体系结构中,每个CPU支持一个子系统:应用处理器支持多媒体及应用子系统,通信处理器支持无线通信子系统。
下面我们介绍两个子系统是如何协作来实现智能手机的无线通信功能的。
智能手机无线通信功能的实现机制,类似于PC机通过调制解调器通信的工作原理。
在这里多媒体应用子系统相当于PC机,起主导作用,通过发送AT命令控制无线通信子系统的行为;而无线通信子系统相当于调制解调器,解析并执行AT命令,完成D/A、A/D转化等工作。
如图所示。
智能手机两个子系统的协作方式但是智能手机的通信机制也具有其独有的特点:1.PC机与调制解调器之间有可见的物理连接(如串口连接线);而多媒体应用子系统与无线通信子系统都集成在智能手机内部,它们之间可以使用内部串口、USB或共享内存的方式通信,通信方式对用户是不可见的。
2.调制解调器将数字信号转化为模拟电信号后,通过电话线路传输;而无线通信子系统还需要把模拟电信号转化为无线电波并通过天线发送和接收。
3.与调制解调器相比,无线通信子系统的功能强大的多。
无线通信子系统支持更复杂的通信协议栈,更丰富的AT命令集,同时还支持语音编码/解码、安全性、电源管理和多种I/O外设(麦克风和扬声器等)。
AT命令简介AT即Attention,AT命令是数据终端设备(Data Terminal Equipment,DTE)与数据通信设备(Data Communication Equipment,DCE)之间进行交互的工业标准语言。
其中DTE是指PC等数据通信的终端设备,而DCE是指调制解调器等通信接口设备。
在无线通信领域,所有的无线通信协议都制定了各自的标准AT命令集,如GSM 07.07、GSM 07.05和GSM07.60等。
用户可以通过AT命令进行呼叫、短信、电话本、数据业务、补充业务、传真等方面的控制。
AT 命令的交互方式所有的AT 命令行都由前缀“AT ”开始,以回车符<CR>结束,中间是一个或多个AT 命令。
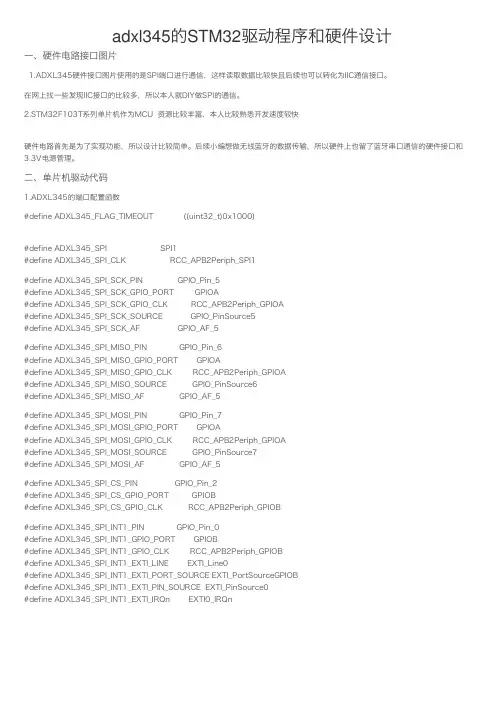
adxl345的STM32驱动程序和硬件设计⼀、硬件电路接⼝图⽚1.ADXL345硬件接⼝图⽚使⽤的是SPI端⼝进⾏通信,这样读取数据⽐较快且后续也可以转化为IIC通信接⼝。
在⽹上找⼀些发现IIC接⼝的⽐较多,所以本⼈就DIY做SPI的通信。
2.STM32F103T系列单⽚机作为MCU 资源⽐较丰富、本⼈⽐较熟悉开发速度较快硬件电路⾸先是为了实现功能,所以设计⽐较简单。
后续⼩编想做⽆线蓝⽛的数据传输,所以硬件上也留了蓝⽛串⼝通信的硬件接⼝和3.3V电源管理。
⼆、单⽚机驱动代码1.ADXL345的端⼝配置函数#define ADXL345_FLAG_TIMEOUT ((uint32_t)0x1000)#define ADXL345_SPI SPI1#define ADXL345_SPI_CLK RCC_APB2Periph_SPI1#define ADXL345_SPI_SCK_PIN GPIO_Pin_5#define ADXL345_SPI_SCK_GPIO_PORT GPIOA#define ADXL345_SPI_SCK_GPIO_CLK RCC_APB2Periph_GPIOA#define ADXL345_SPI_SCK_SOURCE GPIO_PinSource5#define ADXL345_SPI_SCK_AF GPIO_AF_5#define ADXL345_SPI_MISO_PIN GPIO_Pin_6#define ADXL345_SPI_MISO_GPIO_PORT GPIOA#define ADXL345_SPI_MISO_GPIO_CLK RCC_APB2Periph_GPIOA#define ADXL345_SPI_MISO_SOURCE GPIO_PinSource6#define ADXL345_SPI_MISO_AF GPIO_AF_5#define ADXL345_SPI_MOSI_PIN GPIO_Pin_7#define ADXL345_SPI_MOSI_GPIO_PORT GPIOA#define ADXL345_SPI_MOSI_GPIO_CLK RCC_APB2Periph_GPIOA#define ADXL345_SPI_MOSI_SOURCE GPIO_PinSource7#define ADXL345_SPI_MOSI_AF GPIO_AF_5#define ADXL345_SPI_CS_PIN GPIO_Pin_2#define ADXL345_SPI_CS_GPIO_PORT GPIOB#define ADXL345_SPI_CS_GPIO_CLK RCC_APB2Periph_GPIOB#define ADXL345_SPI_INT1_PIN GPIO_Pin_0#define ADXL345_SPI_INT1_GPIO_PORT GPIOB#define ADXL345_SPI_INT1_GPIO_CLK RCC_APB2Periph_GPIOB#define ADXL345_SPI_INT1_EXTI_LINE EXTI_Line0#define ADXL345_SPI_INT1_EXTI_PORT_SOURCE EXTI_PortSourceGPIOB#define ADXL345_SPI_INT1_EXTI_PIN_SOURCE EXTI_PinSource0#define ADXL345_SPI_INT1_EXTI_IRQn EXTI0_IRQn#define ADXL345_SPI_INT2_PIN GPIO_Pin_1#define ADXL345_SPI_INT2_GPIO_PORT GPIOB#define ADXL345_SPI_INT2_GPIO_CLK RCC_APB2Periph_GPIOB#define ADXL345_SPI_INT2_EXTI_LINE EXTI_Line1#define ADXL345_SPI_INT2_EXTI_PORT_SOURCE EXTI_PortSourceGPIOB #define ADXL345_SPI_INT2_EXTI_PIN_SOURCE EXTI_PinSource1#define ADXL345_SPI_INT2_EXTI_IRQn EXTI1_IRQn#define ADXL345_WHO_AM_I_ADDR 0x0F#define ADXL345_CTRL_REG1_ADDR 0x20#define ADXL345_CTRL_REG2_ADDR 0x21#define ADXL345_CTRL_REG3_ADDR 0x22#define ADXL345_CTRL_REG4_ADDR 0x23#define ADXL345_CTRL_REG5_ADDR 0x24#define ADXL345_REFERENCE_REG_ADDR 0x25#define ADXL345_OUT_TEMP_ADDR 0x26#define ADXL345_STATUS_REG_ADDR 0x27#define ADXL345_OUT_X_L_ADDR 0x28#define ADXL345_OUT_X_H_ADDR 0x29#define ADXL345_OUT_Y_L_ADDR 0x2A#define ADXL345_OUT_Y_H_ADDR 0x2B#define ADXL345_OUT_Z_L_ADDR 0x2C#define ADXL345_OUT_Z_H_ADDR 0x2D#define ADXL345_FIFO_CTRL_REG_ADDR 0x2E#define ADXL345_FIFO_SRC_REG_ADDR 0x2F#define ADXL345_INT1_CFG_ADDR 0x30#define ADXL345_INT1_SRC_ADDR 0x31#define ADXL345_INT1_TSH_XH_ADDR 0x32#define ADXL345_INT1_TSH_XL_ADDR 0x33#define ADXL345_INT1_TSH_YH_ADDR 0x34#define ADXL345_INT1_TSH_YL_ADDR 0x35#define ADXL345_INT1_TSH_ZH_ADDR 0x36#define ADXL345_INT1_TSH_ZL_ADDR 0x37#define ADXL345_INT1_DURATION_ADDR 0x38#define I_AM_ADXL345 ((uint8_t)0xD4)#define ADXL345_MODE_POWERDOWN ((uint8_t)0x00)#define ADXL345_MODE_ACTIVE ((uint8_t)0x08)#define ADXL345_OUTPUT_DATARATE_1 ((uint8_t)0x00)#define ADXL345_OUTPUT_DATARATE_2 ((uint8_t)0x40)#define ADXL345_OUTPUT_DATARATE_3 ((uint8_t)0x80)#define ADXL345_OUTPUT_DATARATE_4 ((uint8_t)0xC0)#define ADXL345_X_ENABLE ((uint8_t)0x02)#define ADXL345_Y_ENABLE ((uint8_t)0x01)#define ADXL345_Z_ENABLE ((uint8_t)0x04)#define ADXL345_AXES_ENABLE ((uint8_t)0x07)#define ADXL345_AXES_DISABLE ((uint8_t)0x00)#define ADXL345_BANDWIDTH_1 ((uint8_t)0x00)#define ADXL345_BANDWIDTH_2 ((uint8_t)0x10)#define ADXL345_BANDWIDTH_3 ((uint8_t)0x20)#define ADXL345_BANDWIDTH_4 ((uint8_t)0x30)#define ADXL345_FULLSCALE_250 ((uint8_t)0x00)#define ADXL345_FULLSCALE_500 ((uint8_t)0x10)#define ADXL345_FULLSCALE_2000 ((uint8_t)0x20)#define ADXL345_BlockDataUpdate_Continous ((uint8_t)0x00) #define ADXL345_BlockDataUpdate_Single ((uint8_t)0x80)#define ADXL345_BLE_LSB ((uint8_t)0x00)#define ADXL345_BLE_MSB ((uint8_t)0x40)#define ADXL345_HIGHPASSFILTER_DISABLE ((uint8_t)0x00) #define ADXL345_HIGHPASSFILTER_ENABLE ((uint8_t)0x10)#define ADXL345_INT1INTERRUPT_DISABLE ((uint8_t)0x00) #define ADXL345_INT1INTERRUPT_ENABLE ((uint8_t)0x80)#define ADXL345_INT2INTERRUPT_DISABLE ((uint8_t)0x00) #define ADXL345_INT2INTERRUPT_ENABLE ((uint8_t)0x08)#define ADXL345_INT1INTERRUPT_LOW_EDGE ((uint8_t)0x20)#define ADXL345_INT1INTERRUPT_HIGH_EDGE ((uint8_t)0x00)#define ADXL345_BOOT_NORMALMODE ((uint8_t)0x00)#define ADXL345_BOOT_REBOOTMEMORY ((uint8_t)0x80)#define ADXL345_HPM_NORMAL_MODE_RES ((uint8_t)0x00)#define ADXL345_HPM_REF_SIGNAL ((uint8_t)0x10)#define ADXL345_HPM_NORMAL_MODE ((uint8_t)0x20)#define ADXL345_HPM_AUTORESET_INT ((uint8_t)0x30)#define ADXL345_HPFCF_0 0x00#define ADXL345_HPFCF_1 0x01#define ADXL345_HPFCF_2 0x02#define ADXL345_HPFCF_3 0x03#define ADXL345_HPFCF_4 0x04#define ADXL345_HPFCF_5 0x05#define ADXL345_HPFCF_6 0x06#define ADXL345_HPFCF_7 0x07#define ADXL345_HPFCF_8 0x08#define ADXL345_HPFCF_9 0x09#define ADXL345_CS_LOW() GPIO_ResetBits(ADXL345_SPI_CS_GPIO_PORT, ADXL345_SPI_CS_PIN) #define ADXL345_CS_HIGH() GPIO_SetBits(ADXL345_SPI_CS_GPIO_PORT, ADXL345_SPI_CS_PIN)void ADXL345_Init(ADXL345_InitTypeDef *ADXL345_InitStruct);void ADXL345_RebootCmd(void);void ADXL345_INT1InterruptCmd(uint8_t InterruptState);void ADXL345_INT2InterruptCmd(uint8_t InterruptState);void ADXL345_INT1InterruptConfig(ADXL345_InterruptConfigTypeDef *ADXL345_IntConfigStruct);uint8_t ADXL345_GetDataStatus(void);void ADXL345_FilterConfig(ADXL345_FilterConfigTypeDef *ADXL345_FilterStruct);void ADXL345_FilterCmd(uint8_t HighPassFilterState);void ADXL345_Write(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite);void ADXL345_Read(uint8_t* pBuffer, uint8_t ReadAddr, uint16_t NumByteToRead);2.ADXL345的SPI配置函数void SPI_init(void){GPIO_InitTypeDef GPIO_InitStructure;SPI_InitTypeDef SPI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA |RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(ADXL345_SPI_CLK ,ENABLE);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin =ADXL345_SPI_CS_PIN ;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(ADXL345_SPI_CS_GPIO_PORT, &GPIO_InitStructure);GPIO_SetBits(ADXL345_SPI_CS_GPIO_PORT,ADXL345_SPI_CS_PIN);GPIO_StructInit(&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin =ADXL345_SPI_SCK_PIN|ADXL345_SPI_MISO_PIN|ADXL345_SPI_MOSI_PIN; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(ADXL345_SPI_MOSI_GPIO_PORT, &GPIO_InitStructure);SPI_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;SPI_InitStructure.SPI_Mode=SPI_Mode_Master;SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b;SPI_InitStructure.SPI_CPOL=SPI_CPOL_High;SPI_InitStructure.SPI_CPHA=SPI_CPHA_2Edge;SPI_InitStructure.SPI_NSS=SPI_NSS_Soft;SPI_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_256;SPI_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB;SPI_InitStructure.SPI_CRCPolynomial=7;SPI_Init(ADXL345_SPI, &SPI_InitStructure);SPI_Cmd(ADXL345_SPI,ENABLE);}3.ADXL345初始化配置函数void ADXL345_init(void){SPI_init(); //ADXL345¶Ë¿Ú³õʼ»¯ÅäÖÃSPIͨÐÅADXL345_write_byte(0x1E,0x00); //X Æ«ÒÆÁ¿¸ù¾Ý²âÊÔ´«¸ÐÆ÷µÄ״̬дÈëpdf29Ò³ 0X00 (15.6mg/LSB)ADXL345_write_byte(0x1F,0x00); //Y Æ«ÒÆÁ¿¸ù¾Ý²âÊÔ´«¸ÐÆ÷µÄ״̬дÈëpdf29Ò³ 0X00 (15.6mg/LSB)ADXL345_write_byte(0x20,0x00); //Z Æ«ÒÆÁ¿¸ù¾Ý²âÊÔ´«¸ÐÆ÷µÄ״̬дÈëpdf29Ò³ 0X00 (15.6mg/LSB)ADXL345_write_byte(0x21,0x00); //Çû÷ÑÓʱ0:½ûÓÃ; (1.25ms/LSB)ADXL345_write_byte(0x22,0x00); //¼ì²âµÚÒ»´ÎÇû÷ºóµÄÑÓʱ0:½ûÓÃ; (1.25ms/LSB)ADXL345_write_byte(0x23,0x00); //Çû÷´°¿Ú0:½ûÓÃ; (1.25ms/LSB)ADXL345_write_byte(0x24,0x01); //±£´æ¼ì²â»î¶¯·§Öµ; (62.5mg/LSB)ADXL345_write_byte(0x25,0x01); //±£´æ¼ì²â¾²Ö¹·§Öµ; (62.5mg/LSB)ADXL345_write_byte(0x26,0x2B); //¼ì²â»î¶¯Ê±¼ä·§Öµ; (1s/LSB)ADXL345_write_byte(0x27,0x00); //ADXL345_write_byte(0x28,0x09); //×ÔÓÉÂäÌå¼ì²âÍƼö·§Öµ; (62.5mg/LSB)ADXL345_write_byte(0x29,0xFF); //×ÔÓÉÂäÌå¼ì²âʱ¼ä·§Öµ,ÉèÖÃΪ×î´óʱ¼ä; (5ms/LSB)ADXL345_write_byte(0x2A,0x80); ////ADXL345_read_byte(0x2B); //Ö»¶Á¼Ä´æÆ÷,״̬¶ÁÈ¡ADXL345_write_byte(0x2C,0x0F); //ËÙÂÊÉ趨Ϊ3200HZ²Î¿¼pdf13Ò³ 0X0A 1OO,0X0E 1600HZADXL345_write_byte(0x2D,0x08); //Ñ¡ÔñµçԴģʽ¹Ø±Õ×Ô¶¯ÐÝÃß,ÐÝÃß,»½Ðѹ¦Äܲο¼pdf24Ò³ADXL345_write_byte(0x2E,0x80); //ʹÄÜ DATA_READY ÖжÏADXL345_write_byte(0x2F,0x00);//ADXL345_read_byte(0x30); //Ö»¶Á¼Ä´æÆ÷,״̬¶ÁÈ¡ADXL345_write_byte(0x31,0X0B);//Êý¾ÝͨПñʽ;ÉèÖÃΪ×Լ칦ÄܽûÓÃ,4ÏßÖÆSPI½Ó¿Ú,µÍµçƽÖжÏÊä³ö,13λȫ·Ö±æÂÊ,Êä³öÊý¾ÝÓÒ¶ÔÆë,16gÁ¿³Ì ADXL345_write_byte(0x38,0x00); //FIFOģʽÉ趨,Streamģʽ£¬´¥·¢Á¬½ÓINT1,31¼¶Ñù±¾»º³å//ADXL345_read_byte(0x39); //Ö»¶Á¼Ä´æÆ÷,״̬¶ÁÈ¡}4.ADXL345的读写函数u8 ADXL345_read_byte(u8 add){GPIO_ResetBits(ADXL345_SPI_CS_GPIO_PORT ,ADXL345_SPI_CS_PIN);SPI_I2S_SendData(ADXL345_SPI,(add|0x80)<<8|0x00);while(SPI_I2S_GetFlagStatus(ADXL345_SPI,SPI_I2S_FLAG_TXE)==RESET);while(SPI_I2S_GetFlagStatus(ADXL345_SPI, SPI_I2S_FLAG_RXNE)==RESET);GPIO_SetBits(ADXL345_SPI_CS_GPIO_PORT ,ADXL345_SPI_CS_PIN);return SPI_I2S_ReceiveData(ADXL345_SPI)&0xff;}void ADXL345_write_byte(u8 add,u8 val){GPIO_ResetBits(ADXL345_SPI_CS_GPIO_PORT ,ADXL345_SPI_CS_PIN);SPI_I2S_SendData(ADXL345_SPI,add<<8|val);while(SPI_I2S_GetFlagStatus(ADXL345_SPI,SPI_I2S_FLAG_TXE)==RESET);while(SPI_I2S_GetFlagStatus(ADXL345_SPI, SPI_I2S_FLAG_RXNE)==RESET);GPIO_SetBits(ADXL345_SPI_CS_GPIO_PORT ,ADXL345_SPI_CS_PIN);SPI_I2S_ReceiveData(ADXL345_SPI)&0xff;}void ADXL345_ReadXYZ(float *g){uint8_t BUF[6]; // ´æ·ÅX,Y,ZÖáµÄÊý¾Ýint16_t temp;BUF[0] = ADXL345_read_byte(0x32);BUF[1] = ADXL345_read_byte(0x33);delay_ms(1);BUF[2] = ADXL345_read_byte(0x34);BUF[3] = ADXL345_read_byte(0x35);delay_ms(1);BUF[4] = ADXL345_read_byte(0x36);BUF[5] = ADXL345_read_byte(0x37);delay_ms(1);temp = (BUF[1] << 8) + BUF[0];if(temp < 0)temp = -temp;g[0] = (float)(temp * 3.9); //¼ÆËãÊý¾ÝºÍÏÔʾ,²é¿¼ADXL345¿ìËÙÈëÃŵÚ4Ò³temp = (BUF[3] << 8) + BUF[2];if(temp < 0)temp = -temp;g[1] = (float)(temp * 3.9); //¼ÆËãÊý¾ÝºÍÏÔʾ,²é¿¼ADXL345¿ìËÙÈëÃŵÚ4Ò³temp = (BUF[5] << 8) + BUF[4];if(temp < 0)temp = -temp;g[2] = (float)(temp * 3.9); //¼ÆËãÊý¾ÝºÍÏÔʾ,²é¿¼ADXL345¿ìËÙÈëÃŵÚ4Ò³}。
单片机与电机驱动器的接口设计与实现方法概述:单片机与电机驱动器的接口设计是嵌入式系统开发中关键的一环。
通过正确设计和实现单片机与电机驱动器之间的接口,可以实现准确的控制和驱动电机,实现各种电动设备的功能。
本文将介绍单片机与电机驱动器接口设计的基本原理和常用方法。
第一部分:接口设计原理1. 电机驱动原理在开始设计接口之前,有必要了解电机驱动的基本原理。
电机可以通过电流控制实现速度和转向的控制。
通常,电机驱动器是一个专门控制和调节电机电流的设备。
在单片机与电机驱动器之间设计接口时,需要了解电机的型号、额定电流、额定电压等参数,以确保正确的电流输出。
2. 单片机IO口单片机是实现电机控制的核心芯片。
在设计接口时需要考虑单片机的输出能力和电平特性。
通过单片机的IO口,可以控制电机驱动器的工作方式,如正转、反转、停止等。
同时,还需要确定IO口的电平和电流要求,以保证单片机和电机驱动器之间的信号传递的稳定性和准确性。
在选择单片机时应该考虑其IO口的数量和工作能力。
第二部分:常用的接口实现方法1. 数字接口数字接口是通过数字信号进行通信的一种常见方法。
通常使用GPIO(通用输入输出)口来实现数字接口。
通过GPIO口输出高低电平信号,实现电机的控制。
这种接口设计简单、可靠,适合对控制精度要求不高的情况,如一些简单的家电或智能设备。
2. PWM接口PWM(脉宽调制)接口是一种通过长、短脉冲信号的占空比来控制电机速度的方法。
在单片机与电机驱动器之间设计PWM接口时,需要确定PWM信号的频率和占空比。
通过改变占空比可以改变电机的转速。
这种方法适用于对转速要求较高的电机,如无刷直流电机。
但是,由于使用PWM接口需要占用较多的IO口,因此在选择单片机时应该考虑IO口的数量和功能。
3. 模拟接口模拟接口是通过模拟电压信号来控制电机的一种方法。
这种接口设计主要有两种方式:模拟电压控制和模拟电流控制。
在模拟电压控制中,单片机通过DAC (数模转换器)输出模拟电压信号,电机驱动器根据不同的电压值来控制电机的速度和转向。
单片机外设的驱动程序设计与接口标准选择随着科技的不断进步,单片机作为嵌入式系统的核心,扮演着越来越重要的角色。
单片机外设的驱动程序设计与接口标准选择对于系统的稳定性和性能起着关键作用。
本文将讨论单片机外设驱动程序的设计原则以及选择合适的接口标准,以满足任务的需求。
一、单片机外设驱动程序设计1. 确定外设驱动程序的需求在设计单片机外设驱动程序之前,我们需要明确驱动程序的需求。
外设驱动程序的需求包括但不限于以下几个方面:- 数据传输方式:确定数据传输方式,包括串行传输、并行传输等。
- 数据格式:根据外设的规格,确定数据的格式,例如数据的位数、字节序等。
- 数据处理方式:确定数据如何处理,包括数据的读取、写入、存储等。
- 中断处理:确定是否需要使用中断处理外设的事件。
- 错误处理:确定如何处理外设操作中的错误情况。
2. 设计合理的接口函数接口函数是单片机外设驱动程序的核心部分。
设计合理的接口函数可以简化程序的开发和维护工作。
接口函数的设计应遵循以下原则:- 接口简洁明了:接口函数应该尽量简洁明了,参数的名称和功能应该清晰明了,方便其他开发人员理解和使用。
- 错误处理完备:接口函数应该对可能出现的错误情况进行处理,例如超时错误、传输错误等。
- 版本兼容性考虑:接口函数设计时应该考虑到未来版本的兼容性,避免因为接口变动而导致其他模块的代码无法使用。
3. 优化驱动程序的性能在设计单片机外设驱动程序时,优化性能是非常重要的。
以下是一些优化性能的方法:- 使用缓冲区:合理使用缓冲区可以提高数据的传输效率。
- 减少中断处理时间:减少中断处理时间可以提高系统的响应速度。
- 合理使用定时器:使用定时器可以提高程序的定时精度和稳定性。
二、接口标准选择1. 了解外设的接口标准在选择接口标准之前,我们需要了解所使用的外设所支持的接口标准。
常见的接口标准包括SPI、I2C、UART等,不同的外设可能支持不同的接口标准。
2. 根据需求选择接口标准根据设计需求和外设的特性,选择合适的接口标准。
驱动面试题在面试过程中,经常会遇到关于驱动的问题。
驱动是指计算机系统中的一种特殊程序,用于控制硬件设备的工作。
驱动程序负责与硬件设备进行沟通和交互,使得软件能够正常地访问和操作硬件设备。
下面将介绍一些关于驱动的常见面试题,以及对应的答案。
面试题一:什么是驱动程序?它的作用是什么?答:驱动程序是一种特殊的软件,用于与计算机系统中的硬件设备进行交流和控制。
它的作用是使得操作系统和其他软件能够正常地访问和操作硬件设备。
驱动程序负责与硬件设备进行通信,将来自软件的指令转换为硬件设备可以理解和执行的指令,从而实现对硬件设备的控制。
面试题二:驱动程序有哪些分类?答:驱动程序可以根据作用对象的不同进行分类,常见的分类有以下几种:1. 接口驱动程序:用于控制硬件设备与计算机系统之间的接口,例如USB驱动程序、串口驱动程序等;2. 存储驱动程序:用于控制存储设备,例如硬盘驱动程序、光驱驱动程序等;3. 显卡驱动程序:用于控制显卡设备,负责显示和渲染图形;4. 网络驱动程序:用于控制网络设备,例如网卡驱动程序、无线网卡驱动程序等;5. 打印机驱动程序:用于控制打印机设备,负责将计算机中的文档打印出来。
面试题三:驱动程序的开发流程是怎样的?答:驱动程序的开发流程一般包括以下几个阶段:1. 分析硬件设备:首先需要对要开发驱动程序的硬件设备进行仔细的分析,了解设备的工作原理、接口规范等信息。
2. 设计驱动接口:根据硬件设备的特点和需求,设计驱动程序的接口,包括与操作系统和其他软件的接口,以及与硬件设备的接口。
3. 编写驱动代码:根据驱动接口的设计,编写具体的驱动代码,负责与硬件设备进行通信和控制。
4. 调试测试:对编写的驱动代码进行调试和测试,确保其能够正常工作,并与操作系统和其他软件正常交互。
5. 发布和维护:将驱动程序发布,供用户下载和使用,并及时进行维护和更新,修复可能存在的bug和问题。
面试题四:在驱动程序开发中,常见的问题和挑战有哪些?答:在驱动程序开发中,常见的问题和挑战包括以下几个方面:1. 兼容性问题:由于不同硬件设备的接口规范和操作系统的差异,开发驱动程序时需要考虑兼容性问题,确保驱动程序能够在不同硬件和操作系统环境下正常工作。
USB设备驱动程序的设计是1995年微软、IBM等公司推出的一种新型通信标准总线,特点是速度快、价格低、自立供电、支持热插拔等,其版本从早期的1.0、1.1已经进展到目前的2.0版本,2.0版本的最高数据传输速度达到480Mbit/s,能满足包括视频在内的多种高速外部设备的数据传输要求,因为其众多的优点,USB总线越来越多的被应用到计算机与外设的接口中,芯片厂家也提供了多种USB接口芯片供设计者用法,为了开发出功能强大的USB设备,设计者往往需要自己开发USB设备驱动程序,驱动程序开发向来是WINDOWS开发中较难的一个方面,但是通过用法特地的驱动程序开发包能减小开发的难度,提高工作效率,本文用法Compuware Numega公司的DriverStudio3.2开发包,开发了基于PHILIPS公司USB2.0控制芯片ISP1581的USB设备驱动程序。
USB设备驱动程序的模型图1 USB驱动程序模型USB设备驱动程序是一种典型的WDM(Windows Driver Model)驱动程序,其程序模型1所示。
用户应用程序工作在Windows操作系统的用户模式层,它不能挺直拜访USB设备,当需要拜访时,通过调用操作系统的API(Application programminginterface)函数生成I/O哀求信息包(IRP),IRP被传输到工作于内核模式层的设备驱动程序,并通过驱动程序完成与UBS外设通信。
设备驱动程序包括两层:函数驱动程序层和总线驱动程序层,函数驱动程序一方面通过IRP及API函数与应用程序通信,另一方面调用相应的总线驱动程序,总线驱动程序完成和外设硬件通信。
USB总线驱动程序已经由操作系统提供,驱动程序开发的重点是函数驱动程序。
USB设备驱动程序的设计用法DriverStudio3.2开发USB设备驱动程序该驱动程序的主要功能包括:从控制端点0读取规定个数的数据、向端点0发出控制指令、从端点2批量读数据、向端点2批量写数据,驱动程序的开发采纳DriverStudio3.2驱动程序开发包及VC++6.0,用法开发包中的向导程序DriverWizard就可以便利的生成驱动程序框架、模块及部分程序源代码,开发者只需要在功能模块中加入自己的实现程序就能完成复杂的USB设备驱动程序设计,下面介绍用法DriverWizard 生成ISP1581驱动程序的过程:1)启动DriverWizard,挑选DriverWorks Project制造一个名为USBDIO 的VC++项目;2)在驱动程序类型中挑选WDM Driver,WDM Function Driver,在硬件设备所支持的总线类型中挑选USB(WDM Only),在USB Vendor ID(厂商识别码)中填写0741,在USB Product ID(产品识别码)中填写0821;3)增强USB设备端点,设置端点2为批量输入/输出传输方式;4)在驱动程序支持的功能项中挑选Read、Write、Device Control、Cleanup;5)挑选自动产生批量读及批量写程序代码; 6)在I/O哀求IRP处理方式中挑选None,即IRP不排队;7)在接口的打开方式中挑选Symbolic link:UsbdioDevice,即应用程序以符号链接名打开设备;8)定义应用程序调用DeviceIoControl函数对WDM驱动程序通信的控制指令,结果2所示。
Linux下基于MCP2515的CAN总线驱动程序设计随着物联网技术的不断发展,嵌入式系统和传感器网络在各领域得到了广泛应用。
在这些系统中,可以利用CAN总线进行数据通信,实现设备之间的无缝连接和数据交换。
本文将介绍一种基于Linux系统的MCP2515的CAN总线驱动程序设计。
一、MCP2515MCP2515是一种SPI接口的CAN控制器,具有很高的集成度和灵活性。
它包括CAN控制器、CAN收发器和SPI接口。
MCP2515通过SPI接口与主控制器进行通信,可以实现CAN 节点之间的数据通信。
此外,MCP2515还支持各种标准和扩展CAN帧格式。
二、CAN总线驱动程序设计1、编写SPI驱动程序由于MCP2515是通过SPI接口与主控制器进行通信的,所以需要编写SPI驱动程序。
在Linux系统中,可以通过SPI驱动程序来实现与MCP2515的通信。
SPI口的驱动程序可能会因为系统的不同而有所差异。
2、编写CAN驱动程序在Linux中,可以使用SocketCAN实现CAN总线驱动程序。
SocketCAN是Linux内核自带的CAN协议栈,提供了丰富的API和工具,方便开发者开发CAN应用程序。
在编写CAN驱动程序时,需要先对MCP2515进行配置,设置CAN通信参数以及滤波器参数。
通过SocketCAN提供的API函数可以实现CAN帧的发送和接收,从而实现数据通信。
三、示例代码以下是基于Linux系统的MCP2515的CAN总线驱动程序设计的示例代码:1、SPI驱动程序可以通过spidev接口进行使用:```#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <sys/ioctl.h>#include <linux/spi/spidev.h>#define SPI_DEVICE "/dev/spidev0.0"int spi_fd;int spi_open(){if ((spi_fd = open(SPI_DEVICE, O_RDWR)) < 0){printf("Cannot open %s\n", SPI_DEVICE);return -1;}int mode = SPI_MODE_0;int bits_per_word = 8;int speed = 1000000;if (ioctl(spi_fd, SPI_IOC_WR_MODE, &mode) < 0)return -1;if (ioctl(spi_fd, SPI_IOC_WR_BITS_PER_WORD,&bits_per_word) < 0)return -1;if (ioctl(spi_fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed) < 0) return -1;return 0;}int spi_close(){close(spi_fd);return 0;}int spi_write_read(char *buf, int len, int speed_hz){int ret;struct spi_ioc_transfer transfer;transfer.tx_buf = (unsigned long)buf;transfer.rx_buf = (unsigned long)buf;transfer.len = len;transfer.speed_hz = speed_hz;transfer.bits_per_word = 8;transfer.delay_usecs = 0;ret = ioctl(spi_fd, SPI_IOC_MESSAGE(1), &transfer); return ret;}```2、CAN驱动程序可以通过SocketCAN提供的API函数实现:```#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <sys/ioctl.h>#include <net/if.h>#include <linux/can.h>#include <linux/can/raw.h>int can_fd;int can_init(const char *ifname){if ((can_fd = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {perror("Socket error\n");return -1;}struct ifreq ifr;strcpy(ifr.ifr_name, ifname);if (ioctl(can_fd, SIOCGIFINDEX, &ifr) < 0){perror("SIOCGIFINDEX error\n");return -1;}struct sockaddr_can addr;memset(&addr, 0, sizeof(addr));addr.can_family = AF_CAN;addr.can_ifindex = ifr.ifr_ifindex;if (bind(can_fd, (struct sockaddr *)&addr, sizeof(addr)) < 0){perror("Bind error\n");return -1;}return 0;}int can_deinit(){close(can_fd);return 0;}int can_send(unsigned int id, unsigned char *data, unsigned char len){struct can_frame frame;memset(&frame, 0, sizeof(struct can_frame));frame.can_id = id;frame.can_dlc = len;memcpy(frame.data, data, len);int ret = write(can_fd, &frame, sizeof(struct can_frame));if (ret != sizeof(struct can_frame)){perror("Write error\n");return -1;}return 0;}int can_recv(unsigned int *id, unsigned char *data, unsigned char *len){struct can_frame frame;int ret = read(can_fd, &frame, sizeof(struct can_frame));if (ret < 0){perror("Read error\n");return -1;}*id = frame.can_id;memcpy(data, frame.data, frame.can_dlc);*len = frame.can_dlc;return 0;}```四、结语在Linux系统中,基于MCP2515的CAN总线驱动程序设计相对较为简单,可以利用SocketCAN实现。
第13期2018年7月No.13July,2018数字信号处理(Digital Signal Processing,DSP)是一种用来实现某种数字信号处理任务的专用处理器。
该型处理器能够进行模拟信号的高速采样和模电信号转换,并进行快速时频处理。
DSP在自动控制、信号处理等领域发挥了至关重要的作用。
近年来,随着机器人技术的飞速发展和市场需求不断扩大,人们对机器人控制功能、精度和时效性方面的要求也越来越高。
在机器人控制系统中大量采样DSP处理器进行环境感知和机器人自身工作状态控制正在变得越来越普遍。
因此,在机器人系统中大量采用DSP处理平台对各种信号进行高速处理和分析也变得非常迫切。
为了提高DSP处理器的工作效率,有必要采用实时操作系统对DSP资源进行有效管理。
DSP操作系统有专用和通用两大类。
专用操作系统性能稳定,但可移植性差。
通用操作可移植性好,但一般都由商业公司开发维护,因此使用成本较高[1]。
因此,本文设计了一种基于开源uC/OS II系统的DSP处理器接口驱动程序,在此基础上能够实现DSP的高效管理。
1 uC/OS II系统接口驱动框架μC/OS-II是一款开源、实时性好、移植性好的多任务操作系统。
μC/OS-II提供了完善的接口驱动框架,如图1所示。
图1 μC/OS-II接口驱动框架其中,上层访问抽象接口层对设备访问操作进行了封装,为上层应用提供了5个访问接口,分别包括打开设备、读和写设备、设备控制和关闭设备。
设备管理核心数据结构层通过为硬件设备分配设备名,从而确定相应设备的核心管理数据结构,最终定位到相应的设备驱动模块。
硬件设备驱动模块层负责实际访问硬件设备,实现了打开设备、读和写设备、设备控制和关闭设备接口的具体功能。
DSP接口驱动程序的设计必须遵循μC/OS-II的驱动程序框架[2-3]。
2 DSP接口驱动2.1 DSP接口DSP处理器的接口取决于处理器的类型,本文选择为DSP处理器型号为TMS320LF2407A。
驱动程序的接口设计
WinCE下的驱动皆以动态链接库的形式存在。
驱动实现中可以调用所有的标准API。
WinCE的两种驱动模型——本机驱动模型和流接口驱动模型——其中本机驱动模型用于低级、内置设备,实现一组特定的接口函数;而流接口驱动模型是基本的驱动类型,提供一组通用设备接口,适用于多种设备。
本设计采用的ADC驱动为数据采集驱动,是整个数据采集系统的核心。
首先介绍几个流接口驱动的接口函数:
(1)ADC_Init:
函数原型:DWORD ADC_Init(LPCTSTR Identifier)
功能描述:软件资源初始化,硬件地址空间映射,硬件初始化,中断注册。
参数描述:Identifier为字符串指针,指向本驱动在注册表标识符路径键值。
实现要点:本函数的关键部分在于对硬件地址空间的映射,通Virtualalloc,Viirtualcopy将I/O寄存器、中断寄存器、PWM寄存器和存储器地址空间映射到系统内存空中去;此外还要对硬件进行系统启动后的第一次初始化,包括中断硬件初始化和注册、fifo的清零和采集的禁止等。
注意为保证系统的稳定和低功耗,在本函数运行后,数据采集器处于禁止中断和电源关闭状态。
具体使用:ADC_Init会把设备内容指针传递给ADC_Open。
(2)ADC_Deinit:
函数原型:BOOL ADC_Deinit(PADC_Info pContext)
功能描述:软件资源释放,硬件反初始化,中断屏蔽。
参数描述:pContext是驱动软件结构体指针。
实现要点:本函数为ADC_Init的逆向操作。
具体使用:释放了ADC_Init中分配的资源。
(3)ADC_Open:
函数原型:DWORD ADC_Open(DWORD pContext,DWORD AccessCode,DWORD ShareMode)
功能描述:打开设备,AD上电,禁止中断,禁止触发,清除FIFO,数据缓冲区初始化。
参数描述:pContext是驱动软件结构体指针;AccessCode为读写访问权限。
制模式码:ShareMode为共享访问权限控制模式码。
应用接口:CreateFile
实现要点:本函数主要功能是开启设备电源,并确保其初始化状态可靠,因此其中部分操作与系统初始化阶段类似。
注意在本操作结束后,采集器仍处于禁
止采集状态,fifo清空,并且中断被屏蔽。
具体使用:打开A/D设备,为A/D转换做好准备,返回的设备内容指针将传递给ADC_Read、ADC_Write、ADC_IOControl。
(4)ADC_Close:
函数原型:BooL ADC_Close(DWORD pContext)
功能描述:禁止触发,禁止中断,清除FIFO,AD关闭,数据缓冲区初始化设备掉电。
参数描述:pContext是驱动软件结构体指针
应用接口:CloseHandle
实现要点:本函数为ADC_Open的逆向操作。
(5)ADC_Read:
函数原型:DWORD ADC_Read (DWORD hOpenContext,LPVOID pBuffer,DWORD Count)
功能描述:读取内部数据流缓冲,并传出至应用层。
参数描述:hOpenContext是驱动软件结构体指针;pBuffer为传出数据流指针;Count为传出数据流长度。
应用接口:ReadFile
实现要点:本函数用于复制驱动内部数据流缓冲,并将其传出至应用程序,注意此处数据流传送的有效性,由于从系统角度来看,驱动和应用程序同属于用户态的两个进程,彼此地址空间无法互相访问,所以本环节设计到进程间大数据量的通讯问题,此问题在嵌入式系统紧张的资源中尤其需要谨慎处理。
具体使用:A/D设备读操作函数,可以将读出的值存放在此函数的输出缓冲区中。