基于CMOS摄像头的智能车路径跟踪系统设计
- 格式:pdf
- 大小:970.64 KB
- 文档页数:4
基于计算机视觉的智能车辆识别与跟踪系统设计智能车辆识别与跟踪系统的设计是基于计算机视觉技术,在车辆识别和跟踪方面发挥着重要的作用。
该系统可以通过图像或视频数据对道路上的车辆进行自动识别和跟踪,为交通管理、安全监控以及智能交通系统等领域提供有力支持。
一、系统设计目标智能车辆识别与跟踪系统旨在实现以下目标:准确识别道路上的车辆;实时跟踪车辆的位置和动态行为;提供可靠的车辆信息用于其他应用;具备较高的鲁棒性和实时性。
二、系统设计原理智能车辆识别与跟踪系统的设计基于计算机视觉技术。
其主要框架包括图像采集、预处理、特征提取、车辆识别与跟踪等步骤。
1. 图像采集系统通过摄像头或其他图像采集设备获取道路上的车辆图像或视频。
采集设备的性能和布置位置对系统效果有重要影响,应根据具体应用场景进行选择和调整。
2. 预处理采集到的图像或视频数据需要进行预处理,以消除干扰和提高后续处理的效果。
预处理包括图像去噪、图像增强、图像分割等操作。
通过这些操作,可以得到清晰、准确的车辆图像,为后续的特征提取提供良好的基础。
3. 特征提取特征提取是智能车辆识别与跟踪系统的关键步骤。
系统需要从车辆图像中提取出能够表征车辆特征的关键信息。
常用的特征包括车辆颜色、形状、纹理等。
可以采用传统的特征提取算法,如Haar特征、SIFT特征等,也可以使用基于深度学习的卷积神经网络(CNN)进行特征提取。
4. 车辆识别与跟踪在获得了车辆的特征信息后,系统需要将其与已知的车辆模型进行比对,以实现车辆的识别。
识别结果可以用于车辆分类、车辆计数、车辆检测等应用。
同时,系统还需要实时跟踪车辆的位置和运动轨迹,以提供准确的车辆信息。
跟踪算法可以采用相关滤波器、卡尔曼滤波器等传统方法,也可以使用基于深度学习的目标跟踪算法。
三、系统设计关键技术与挑战智能车辆识别与跟踪系统的设计涉及到许多关键技术和挑战。
以下是其中一些主要方面:1. 图像处理和分析图像处理和分析是智能车辆识别与跟踪系统的基础。
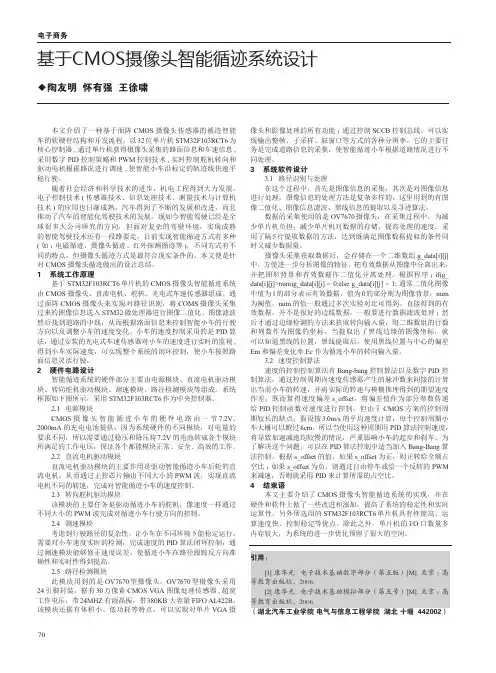
电子商务70本文介绍了一种基于面阵CMOS摄像头传感器的循迹智能车的软硬件结构和开发流程,以32位单片机STM32F103RCT6为核心控制器,通过单片机获得摄像头采集的路面信息和车速信息,采用数字PID控制策略和PWM控制技术,实时控制舵机转向和驱动电机根据路况进行调速,使智能小车沿标定的轨迹线快速平稳行驶。
随着社会经济和科学技术的进步,机电工程得到大力发展,电子控制技术(传感器技术、信息处理技术、测量技术与计算机技术)的应用也日渐成熟,汽车得到了不断的发展和改进,而且推动了汽车的智能化驾驶技术的发展。
现如今智能驾驶已经是全球很多大公司研究的方向,但面对复杂的驾驶环境,实现成熟的智能驾驶技术还有一段路要走。
目前实现智能循迹方式有多种(如:电磁循迹、摄像头循迹、红外探测循迹等),不同方式有不同的特点,但摄像头循迹方式是最符合现实条件的。
本文便是针对CMOS摄像头循迹做出的设计总结。
1 系统工作原理基于STM32F103RCT6单片机的CMOS摄像头智能循迹系统由CMOS摄像头、直流电机、舵机、光电式车速传感器组成。
通过面阵CMOS摄像头来实现对路径识别,将COMS摄像头采集过来的图像信息送入STM32微处理器进行图像二值化、图像滤波然后找到道路的中线,从而根据路面信息来控制智能小车的行驶方向以及调整小车的速度变化。
小车的速度控制采用的是PID算法,通过安装的光电式车速传感器对小车的速度进行实时的监视,得到小车实际速度,可实现整个系统的闭环控制,使小车按照路面信息灵活行驶。
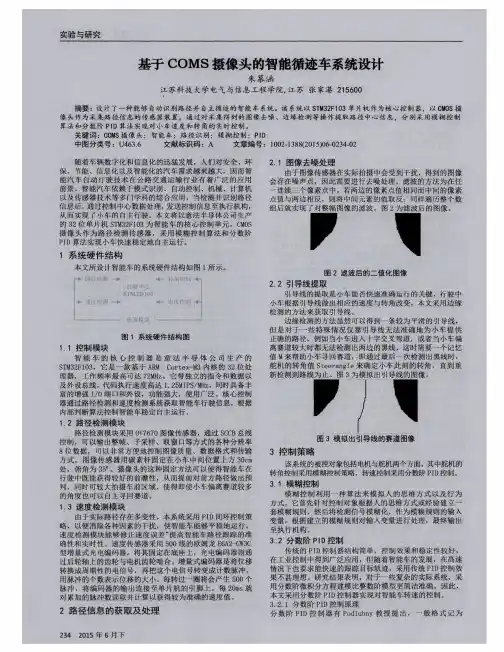
2 硬件电路设计智能循迹系统的硬件部分主要由电源模块、直流电机驱动模块、转向舵机驱动模块、测速模块、路径检测模块等组成。
系统框图如下图所示,采用STM32F103RCT6作为中央控制器。
2.1 电源模块CMOS摄像头智能循迹小车的硬件电路由一节7.2V、2000mA的充电电池提供,因为系统硬件的不同模块,对电量的要求不同,所以需要通过稳压和降压将7.2V的电池转成各个模块所满足的工作电压,保证各个都能模块正常、安全、高效的工作。
基于CMOS摄像头的智能车路径跟踪系统设计李国柱【期刊名称】《现代电子技术》【年(卷),期】2011(034)018【摘要】A smart vehicle that can automatically recognize and trace its route is designed. It takes MC9S12XS128 as a core controller, and CMOS camera OV6620 as an acquisition device for route information. The route information is extracted by binarization, denoising. edge detection and breakpoint interpolation on the image collected. The system uses the minimum square fitting method to fit a straight line with the tracking information and calculate the value of direction control according to the parameters of the fitted line. The PD algorithm is adopted for the steering control. The velocity of intelligent vehicle is set on the basis of steering angle. The real-time control of angle and speed is implemented on the smart vehicle. Experiments show that the intelligent vehicle system is able to automatically run fast and stably along the black track. And the path recog-nization and tracking is achieved.%设计了一种能自动识别和跟踪路径的智能车系统.用以MC9S12XS128作为核心控制器,利用COMS图像传感器OV6620作为路径信息采集装置,通过对采集图像进行二值化处理、去噪操作、边缘检测和断点修补后提取出路径中心信息.利用最小二乘法对路径中心信息进行直线拟合,根据拟合直线的参数计算舵机控制量.对舵机采用PD控制算法,根据舵机转向角设定小车的速度,并对小车实行转角和速度的实时控制.实验证明,该智能车系统能够沿着黑色赛道快速稳定地自动行驶,实现了路径识别与跟踪.【总页数】4页(P12-14,17)【作者】李国柱【作者单位】西安文理学院机电系,陕西西安710065【正文语种】中文【中图分类】TN919-34;TP242.6【相关文献】1.基于CMOS摄像头的循迹智能车系统设计 [J], 郝铭轩2.基于CMOS摄像头循迹的四轮智能车控制系统设计 [J], 吴西伟;沈世斌3.基于CMOS摄像头的直立循迹智能车系统设计 [J], 吴苗苗;沈世斌;王亮;李昊洋4.基于CMOS摄像头的循迹智能车系统设计 [J], 郝铭轩;5.基于CMOS摄像头循迹的智能车控制系统设计 [J], 郑亚利;古训因版权原因,仅展示原文概要,查看原文内容请购买。
Computer Knowledge and Technology 电脑知识与技术人工智能及识别技术本栏目责任编辑:唐一东第6卷第28期(2010年10月)基于摄像头的智能车路径识别系统的设计黄娴1,张曦煌1,陆冬磊2(1.江南大学物联网工程学院,江苏无锡214122;2.无锡科技职业学院软服学院,江苏无锡214028)摘要:路径识别是智能车应用中的一项关键技术,直接决定了智能车行驶的质量。
本智能车采用飞思卡尔16位微控制器MC9S12DG128为核心控制单元,利用CCD 摄像头进行黑白道路图像采样以获取道路图像信息,通过二值化算法提取道路黑线,进而对小车的运行方向和速度进行控制。
实际测试表明,能较好地实现智能小车的路径识别功能。
关键词:智能车;CCD 摄像头;图像采样;路径识别中图分类号:TP391文献标识码:A 文章编号:1009-3044(2010)28-8083-03Design of Intelligent Vehicle Path Identification System based on CameraHUANG Xian 1,ZHANG Xi-huang 1,LU Dong-lei 2(1.School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China;2.School of Software and Service Outsourcing,Wuxi Professional College of Science and Technology,Wuxi 214028,China)Abstract:Path identification is a key technology in the application of intelligent vehicles.It directly determines the running quality of in -telligent vehicles.In this paper,we have developed an intelligent vehicle with advanced path identification algorithm.The embedded sys -tem is based on Freescale ’s 16-bit MCU,D cameras are used to collect image samples of monochrome road.Then the binary algorithm is introduced to extract road black-lines,through which the direction and speed of the intelligent vehicle is controlled.It is proved by experiments that our embedded system fulfills the path recognition task as an intelligent vehicle.Key words:intelligent vehicles;CCD cameras;image samples;path recognition随着半导体在汽车中的应用越来越普遍,汽车的电子化和智能化已成为行业发展的必然趋势。

基于CCD摄像头的智能车系统设计摘要随着电子技术与智能控制的发展,智能车的已经成为自动控制领域内的一个研究热点。
第一章绪论1.1研究背景1.1.1 智能车的发展历程智能车的发展是从自动导引车(Automatic Guided Vehicle,AGV)起步的。
AGV是指装有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护及各种移栽功能的运输车辆。
1913年,美国福特汽车公司首次将有轨导引的AGV代替输送机用到底盘装配上。
1953年,美国Barrett Electric公司制造了世界上第1台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
20世纪60年代和70年代初,AGV仍采用这种导向方式。
在20世纪70年代和80年代初,AGV的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发。
随着电子和计算机技术的发展,视觉导航和激光导航成为了热门的研究方向。
由此出现了智能车的概念。
从1987年到1994年,在欧洲展开可“普罗米修斯” (Prometheus Program for the European traffic of highest efficiency and unprecedented safety)EUREKA项目。
该项目中颇具代表性的是戴姆勒——奔驰公司研制的VITAⅡ试验车,于1994年10月在巴黎附近的一条告诉公路上进行了车辆导航试验,在长达几千公里的普通三车道路段中采用了驾驶员辅助驾驶和车辆自主驾驶相结合的导航方法。
德国联邦大学(UBM),从20世纪80年代初期就开始了智能车辆自主导航研究,其合作伙伴是德国戴姆勒—奔驰汽车公司。
其中最具代表性的是一辆由豪华型本车500SEL改装成的VaSoRs-P试验车。
VaSoRs-P 试验车在高速公路和普通公路上进行了大量的试验,试验内容包括跟踪车道线,躲避障碍以及自动超车等。
基于摄像头传感器的智能车循迹算法设计方案智能车循迹算法设计是一个面向摄像头传感器的重要问题。
在该设计方案中,我们将使用摄像头传感器获取实时图像,并通过算法对车辆的行驶轨迹进行识别和监控。
1.硬件配置首先,我们需要准备一辆小型车辆,安装上摄像头传感器,以便获取行驶过程中的实时图像。
摄像头传感器应具备高清晰度、广角和长距离拍摄等特点,以确保获得准确的图像信息。
2.图像采集和处理摄像头传感器将连续获取车辆行驶过程中的实时图像,这些图像将用于车辆循迹算法的识别和处理。
在图像采集过程中,需要优化传感器的曝光、对焦和白平衡等参数,以确保图像的清晰度和准确性。
在图像处理方面,我们可以借助计算机视觉技术,使用图像处理算法对采集到的图像进行预处理。
预处理的目标是提取图像中的目标物体,并将其转换为二值图像,以便后续的轨迹识别和分析。
3.循迹算法设计循迹算法是整个智能车循迹系统的核心。
其主要任务是通过分析图像中的车道线信息,实现车辆的自动循迹。
在循迹算法的设计中,我们可以采用以下步骤:步骤1:车道线检测步骤2:车道线跟踪检测到车道线后,接下来需要对其进行跟踪。
可以使用基于Hough变换或RANSAC算法的直线拟合方法,通过拟合检测到的车道线点集,得到车道线的方程参数。
步骤3:车辆偏离检测根据车道线的方程参数,可以计算出车辆与车道线之间的距离,进而判断车辆是否偏离了轨迹。
如果车辆偏离了轨迹,可以通过调整车辆的方向盘或驱动电机,使车辆重新回到正确的行驶轨迹上。
4.实时控制和反馈在循迹算法的实现中,需要实时控制车辆的转向和行驶速度。
可以通过与车辆的控制系统进行接口设计,将算法计算得到的转向角度和速度信息传递给车辆控制系统。
总结基于摄像头传感器的智能车循迹算法设计方案,包括硬件配置、图像采集和处理、循迹算法设计和实时控制与反馈等关键步骤。
通过对摄像头传感器获取到的图像进行车道线检测、跟踪和车辆偏离检测,可以实现智能车的自动循迹和行驶控制,提高行驶的准确性和安全性。
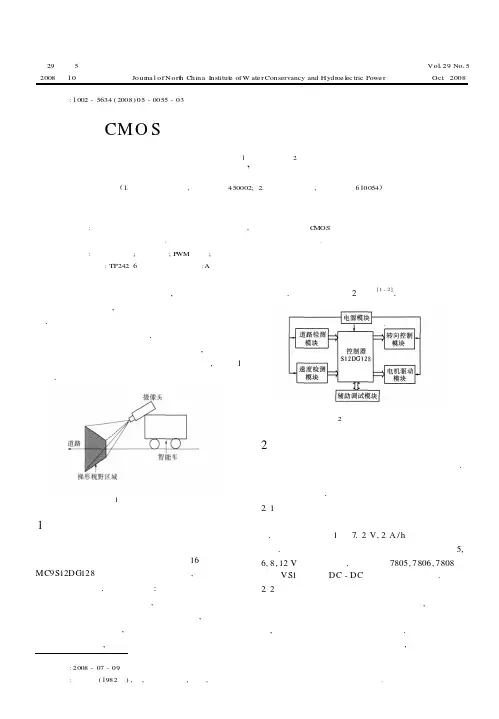
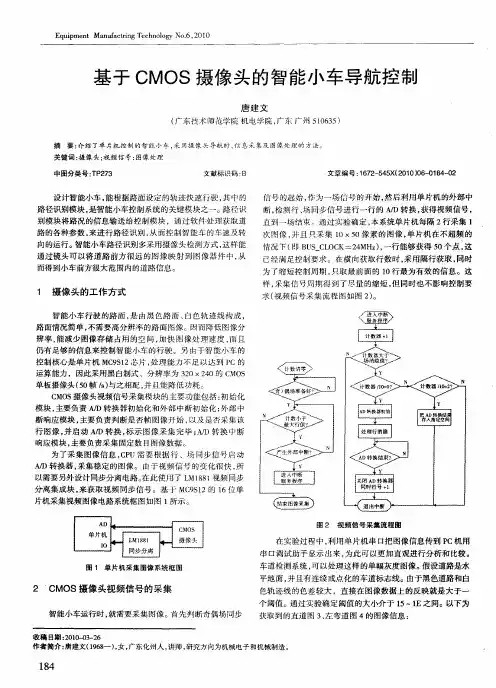
第29卷第5期2008年10月华 北 水 利 水 电 学 院 学 报Journa l of Nort h China Institut e of W ate r Conservancy and Hydroe l ec tric Powe rVol 129No 15Oct .2008收稿日期作者简介云 康(—),男,河南杞县人,助教,主要从事自动化测量、测试与控制系统方面的研究文章编号:1002-5634(2008)05-0055-03基于CM O S 摄像头的智能寻迹车的设计与实现云 康1,高 超2(1.郑州轻工业学院,河南郑州450002;2.电子科技大学,四川成都610054)摘 要:分析了自动寻迹智能车的几个关键实现技术,给出了一种采用C MOS 摄像头检测方式的智能车的电路设计、控制算法和软件流程.测试结果表明该车能够准确跟踪引导线运行.关键词:摄像头检测;微控制器;P WM 控制;智能车中图分类号:TP242.6 文献标识码:A 智能车又名轮式移动机器人,可作为安装有特定设备的交通载体,使用在科学探索、工业生产等领域.目前智能车的研究重点主要集中在视频检测及目标检测、跟踪、避障等方面.笔者主要针对具有黑色引导线并带有弯道、坡道等的特定道路,设计出能够自动识别路径并跟踪行驶的智能模型车,如图1所示.图1 智能车示意图1 系统设计将汽车工业中实际用于中央车身电子、底盘安全及动力总成控制的飞思卡尔公司16位处理器MC9S12DG 128引入到智能车的开发中,提高智能车的整体控制性能.设计思路为:由安装在智能车前端的摄像头拍摄车体前方道路,从拍摄的道路图片中提取黑色引导线信息送到智能车控制器,判断车身相对前方引导线位置,如有偏离则根据算法控制舵机进行方向调整,同时控制驱动电机跟踪引导线稳定行驶.系统结构如图2所示[1-2].图2 系统结构框图2 关键技术分析与硬件设计系统的关键技术在于道路引导线信息的提取.硬件电路主要围绕引导线检测、车辆控制、电源保障等几个方面设计.2.1 电源模块电源模块为系统其他各电路运行提供电源保障.车载主电源为1块7.2V,2A /h 可充电镍镉蓄电池.由于电路主板、驱动电机、摄像头分别需要5,6,8,12V 等电压供电,分别采用7805,7806,7808和一块VS1开关型DC -DC 升压集成电路实现.2.2 道路检测模块该模块主要实时拍摄车体前方道路,并提取前方引导线相对于智能车的偏移量、方向、曲率等信息,以实现智能车自动沿引导线运行.用摄像头拍摄车体前方的道路,得到由黑色引:2008-07-09:1982.导线和白色路面组成的图像.引导线和路面的黑白二色在图像中就体现在其灰度值的大小差异上,摄像头中的图像传感器芯片将各点处图像的灰度转换成与灰度一一对应的电压值通过视频信号端分场逐行输出.利用控制器采样图像中各点的电压值,就可以判断出引导线的位置、形状等信息[3].系统采用1/3Omni V isi on C MOS 传感芯片的黑白摄像头,隔行扫描P A L 制式,场频为50Hz,分辨率为320电视线,即摄像头每秒钟输出50场图像,每场图像分320行输出.由于智能车始终在运行,可将摄像头奇偶场作为2幅图像来处理,复合视频信号由摄像头信号端输出.另外,系统采用LM1881专用视频同步信号分离芯片从摄像头输出的复合视频信号中提取出行同步脉冲、场同步脉冲、奇偶场换场信号等图像的换行和换场的同步信息.由摄像头、LM1881电路和S12控制器构成的智能车视频采样电路如图3所示.图3 视频采样电路视频采样原理为:当PS1引脚电平发生翻转时,表明新的一场图像到来,图像采样开始;当PT0引脚检测到一个行同步信号上升沿,表明新的一行图像数据开始输出,S12控制器启动对AD0引脚的摄像头视频信号进行采样,直到下一个行同步信号到PT0引脚为止,表示对该场中的这一行图像采集结束;控制器反复执行上述步骤,就可以将一场图像320行信息全部采集出来.2.3 舵机驱动模块该模块主要控制智能车根据引导线形状进行转向.舵机本身是一个位置随动系统,由舵盘、减速齿轮组、位置反馈电位计、直流电机和控制电路组成.通过内部设计使舵盘输出转角正比于给定的控制信号.该系统舵机型号为F U T ABA S3020.控制信号是周期为20m s 的P WM 信号,脉冲宽度决定舵机输出的转角 电机驱动模块车身后置驱动电机是整个智能车的动力来源,采用RS -380直流电机.使用H 桥驱动电路控制电机加速运行、减速制动,控制端信号为两路P WM 信号.为使电路简单,采用MC33886集成全桥驱动芯片,驱动电路设计如图4所示.图4 电机驱动电路图2.5 速度检测模块为使智能车在急转弯时不至于速度过快而冲出道路,控制器除需控制前轮转向外,还需控制车速.该模块采用光电透射式检测方法,将具有齿槽结构的圆盘固定在智能车后轮轴上,圆盘转动时,光电传感器输出脉冲信号,通过整形后送至MC9S 12DG128控制器,计算智能车当前运行速度,并根据采样到的引导线形状调整当前智能车的运行速度.3 软件设计3.1 开发软件开发软件采用F reescal 公司的产品Code W arrior4.0.Code W a rrior f or S12是Free sca l 公司为S12系列处理器提供的嵌入式应用开发软件包,包含集成开发环境I D E 、处理器专家系统、全芯片仿真等,是一款功能强大的图形化编程软件[4].3.2 控制算法将摄像头安装在车体前部中间位置,调整摄像头的安装高度、前倾角和焦距,使所拍摄道路图像清晰,有效视场宽约40.0c m ,有效前瞻距离约50.0c m ,已知引导线宽2.5c m.由摄像头测试可知,摄像头输出的每场320行信号中,第23行到310行为视频信号,前22行和后10行为场消隐信号,即摄像头每场会扫描产生288行有效视频信号,也就是说摄像头在纵向有288个像素的分辨能力.在视频区域中每行信号持续时间相同约64.0μs,行同步脉冲持续约 4.7μs,所以每场图像单个视频信号行中有效视频持续的时间约57.3μs .通过对S12控制器AD 时钟频率设置,AD转换时间可设为μ[5],所以每行可采样点数为个该智能车每场最大可获得×像素分辨率的图像数据65 华 北 水 利 水 电 学 院 学 报 2008年10月.2.4 1.4s 40.28840.尽管通过图像处理可以获得更多的道路信息,但会增大S12控制器的数据存储和处理负担.为了简化过程,也可以只使用图像中的一行数据提取引导线位置.提取引导线位置主要有2种方法:一是将图像一行数据中灰度值最低点位置作为引导线中心位置;二是从动态阈值二值化后的图像中进行提取,寻找图像中每行连续黑点最多的一段,以该段中心点的位置作为引导线中心位置.在所采集行40个采样点中,以第20个点为智能车车身位置,提取出引导线中心位置[6-7]所在点,记为x,引导线与车身偏差记为e (x ),e (x )=x -20,则e (x )值从-19到20,共有40种情况.若e(x)=0,表示前方引导线位置与车身位置重合,舵机不输出转角,智能车直行;若e (x )<0,表示前方引导线位置在车身位置左侧,则舵机输出转角驱动智能车左转;同理e (x )>0,表示引导线位置在车身位置右侧,则舵机输出转角驱动智能车右转.同时兼顾当前车速调整驱动电机控制P WM 信号,以使智能车回到引导线的正上方,达到稳定跟踪道路引导线的设计要求.具体参数见表1.表1 控制参数表引导线位置偏差e (x)值方向舵机转角/(°)驱动电机P WM /%1-19右偏-36.474.802-18右偏-34.666.96……………20正上方0.086.27……………3919左偏34.666.964020左偏36.474.803.3 程序流程主程序采用和P LC 相似的周期性检测控制思想.控制器每检测到摄像头的换场信号,便调用一次视频采样程序和车速检测程序,根据得到的引导线和车速数据,调用舵机和驱动电机控制程序对智能车的运行状态进行实时控制,以完成循线运行的要求,如图5所示.图5 主程序流程图4 结 语测试表明,采用MC9S12DG 128控制器和C MOS 摄像头检测方式设计并试制的智能寻迹车,检测范围宽,前瞻性强,舵机转向流畅,车体跟踪引导线准确.参 考 文 献[1]黄开胜,金华民,蒋狄南.韩国智能模型车技术方案分析[J ].电子产品世界,2006,14(5):150-152.[2]浦东兵,孙英娟,周光有,等.一种嵌入式智能寻迹机器人设计[J ].微计算机信息,2008,24(3-2):241-242.[3]卓晴,王<,王磊.基于面阵CCD 的赛道参数检测方法[J ].电子产品世界,2006,18(7):143-145.[4]邵贝贝.单片机嵌入式应用的在线开发方法[M ].北京:清华大学出版社,2004:243-255.[5]王威,胡继云,郑维,等.HCS12微控制器原理及应用[M ].北京:北京航空航天大学出版社,2007:155-181.[6]邱寄帆.移动机器人寻线导航系统的设计与实现[J ].微计算机信息,2006,22(9-2):201-203.[7]万永伦,丁杰雄.一种机器人寻线控制系统[J ].电子科技大学学报,2003,32(1):48-51.Design an d R ea l i za t ion of Autotra ck i ng Sm a r tcar Ba sed on C MO S C a m eraY UN Kang 1,G A O Chao 2(1.Zhengzhou University of L i ght I ndustry,Z hengzhou 450002,China;2.Unive rsity of Elec tronic Science and Technol ogy of China,Chengdu 610054,China )Ab stra ct:Severa l key technol ogies of the aut otracking s ma rt ca r are analysed .A way of using C MOS ca m era detection m ethod of the rea l 2z f ,,f T y yK y ;2;WM ;75第29卷第5期云 康等: 基于C MOS 摄像头的智能寻迹车的设计与实现 i ati on o the s ma rtca r c ircu it co n tro l algo rith m s an d s o t w are p r o cesses is g i ven .est resu lts in d ica tes t h at the ca r is ab le t o track the gu ide lin e accu ratel and stab l.e w or d s:ca m era de t ec tion m icro con tro ller P co n tro l s ma rtca r。
基于CMOS数字摄像头检测路径的智能小车设计毛堃1,樊月珍1,钱桦1,刘桂林1(1.北京林业大学工学院,北京100083)摘 要: 以Freescale公司的MC9S12DG128作为系统的核心控制处理器,通过CMOS数字摄像头获取前方赛道信息,采用二值化法提取赛道黑线,通过采用特殊的算法来判断赛道的大致变化趋势,从而实现小车提前转向,并根据路况的不同而为小车分配以不同的速度。
实验结果表明,小车能够稳定地自动寻线。
关键词:单片机,CMOS数字摄像头,图像采集,速度,斜率文献标识码:A 中图分类号:TP302Design of Auto Route Identified Vehicle Model Based on CMOSMao Kun1 ,Fan Yue-zhen1 ,Qian Hua1 ,Liu Gui-lin1(1.Institute of Technology, Beijing Forestry University, Beijing 100083, China)Abstract: Freescale MC9S12DG128 processor was used on an Auto Route Identified Vehicle Model. The vehicle model obtains the track image through a CMOS digital camera. It uses binarization method to get black line. Smart car analyzes the road conditions ahead through a specific algorithm so that it can easily adjust its velocity according to different conditions. The experimental results show that the method was reasonable.Keywords: Freescale MCU, CMOS digital camera, image acquisition, velocity, slope0 前言“飞思卡尔杯”全国大学生智能汽车竞赛是由教育部批准并委托自动化专业教学指导分委会主办,飞思卡尔公司协办,面向全国大学生的重要赛事。
基于CMOS摄像头循迹的智能车控制系统设计郑亚利;古训【摘要】本文介绍了一种基于CMOS摄像头路径识别智能车控制系统设计.该系统包括了机械安装、硬件设计和单片机端调试.智能车以32位单片MK60DN512ZVLQ10作为核心控制器,利用摄像头OV7725作为路径识别装置,驱动电路采用4NMOS全桥驱动电路,通过Flash对参数调整,为智能车在赛道上高速稳定行驶提供了保证.【期刊名称】《贵阳学院学报(自然科学版)》【年(卷),期】2019(014)001【总页数】5页(P100-104)【关键词】智能车;全桥驱动;Flash【作者】郑亚利;古训【作者单位】贵阳学院电子与通信工程学院,贵州贵阳 550005;贵阳学院电子与通信工程学院,贵州贵阳 550005【正文语种】中文【中图分类】TP2731 引言本文设计的MINI版智能车系统是无人驾驶智能车仿真。
随着汽车市场竞相角逐和科研人员的重视,且无人驾驶智能车在减少交通事故、国家科技发展中有着重要作用,无人驾驶智能车成为当今AI领域的热门话题。
MINI版智能车采用摄像头采集道路图像,通过软件提取道路特征,识别道路,为舵机和电机提供一个精确控制数据。
智能车可按照人类预定的模式在特定环境中行驶,从而达到预期目的,在一定程度上,MINI版智能车的设计系统类似于无人驾驶智能车,从而在研究无人驾驶智能车中极具参考价值。
2 硬件系统设计硬件系统部分采用32位单片机MK60DN512ZVLQ10[1]为核心控制器,由机械、电源、传感器、主控板等设计模块组成。
硬件系统结构如图1所示。
图1 硬件系统结构Fig.1 hardware system structure根据恩智浦智能车竞赛规则,光电四轮组采用B车模[2],如图2所示。
车长28.5cm,宽17.8cm,高6.0cm;前后轮高度可调,双滚珠差速[2];转向使用S-D5数字舵机,工作电压在4.5V-5.5V,驱动频率是300HZ,力矩5.0KG;采用540电机,电机DC7.2V。