船舶操纵与摇荡
- 格式:doc
- 大小:248.50 KB
- 文档页数:9
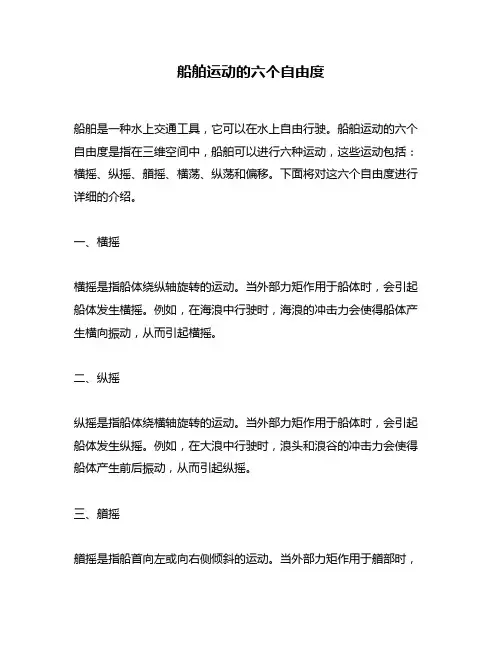
船舶运动的六个自由度船舶是一种水上交通工具,它可以在水上自由行驶。
船舶运动的六个自由度是指在三维空间中,船舶可以进行六种运动,这些运动包括:横摇、纵摇、艏摇、横荡、纵荡和偏移。
下面将对这六个自由度进行详细的介绍。
一、横摇横摇是指船体绕纵轴旋转的运动。
当外部力矩作用于船体时,会引起船体发生横摇。
例如,在海浪中行驶时,海浪的冲击力会使得船体产生横向振动,从而引起横摇。
二、纵摇纵摇是指船体绕横轴旋转的运动。
当外部力矩作用于船体时,会引起船体发生纵摇。
例如,在大浪中行驶时,浪头和浪谷的冲击力会使得船体产生前后振动,从而引起纵摇。
三、艏摇艏摇是指船首向左或向右侧倾斜的运动。
当外部力矩作用于艏部时,会引起艏部发生摇晃,从而引起艏摇。
例如,在强风中行驶时,风力会使得船首向左或向右倾斜,从而引起艏摇。
四、横荡横荡是指船体在水平方向上的移动。
当外部力矩作用于船体时,会引起船体发生横向位移,从而引起横荡。
例如,在强浪中行驶时,海浪的冲击力会使得船体产生侧向位移,从而引起横荡。
五、纵荡纵荡是指船体在垂直方向上的移动。
当外部力矩作用于船体时,会引起船体发生垂直位移,从而引起纵荡。
例如,在大浪中行驶时,浪头和浪谷的冲击力会使得船体产生上下位移,从而引起纵摇。
六、偏移偏移是指船体在水平面内的旋转运动。
当外部力矩作用于船体时,会使得船体绕一个轴线旋转,并且这个轴线与纵轴和横轴都不重合。
这种运动称为偏移。
例如,在强风中行驶时,风力会使得船体绕一个轴线旋转,从而引起偏移。
总结:船舶运动的六个自由度包括横摇、纵摇、艏摇、横荡、纵荡和偏移。
这些自由度的存在使得船体可以在三维空间中自由运动,并且能够适应不同的水上环境。
对于船员来说,了解船舶运动的六个自由度是非常重要的,因为只有了解了这些自由度,才能够更好地掌握船体运动规律,从而保证航行安全。
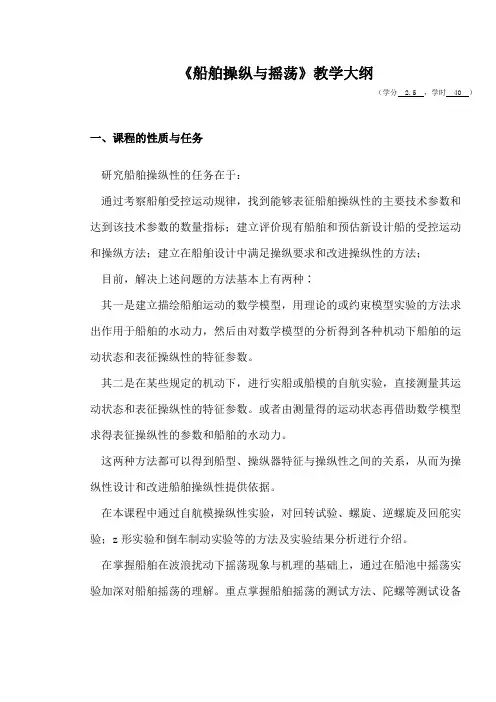
《船舶操纵与摇荡》教学大纲(学分 2.5 ,学时 40 )一、课程的性质与任务研究船舶操纵性的任务在于:通过考察船舶受控运动规律,找到能够表征船舶操纵性的主要技术参数和达到该技术参数的数量指标;建立评价现有船舶和预估新设计船的受控运动和操纵方法;建立在船舶设计中满足操纵要求和改进操纵性的方法;目前,解决上述问题的方法基本上有两种∶其一是建立描绘船舶运动的数学模型,用理论的或约束模型实验的方法求出作用于船舶的水动力,然后由对数学模型的分析得到各种机动下船舶的运动状态和表征操纵性的特征参数。
其二是在某些规定的机动下,进行实船或船模的自航实验,直接测量其运动状态和表征操纵性的特征参数。
或者由测量得的运动状态再借助数学模型求得表征操纵性的参数和船舶的水动力。
这两种方法都可以得到船型、操纵器特征与操纵性之间的关系,从而为操纵性设计和改进船舶操纵性提供依据。
在本课程中通过自航模操纵性实验,对回转试验、螺旋、逆螺旋及回舵实验;z形实验和倒车制动实验等的方法及实验结果分析迸行介绍。
在掌握船舶在波浪扰动下摇荡现象与机理的基础上,通过在船池中摇荡实验加深对船舶摇荡的理解。
重点掌握船舶摇荡的测试方法、陀螺等测试设备的使用、模型实验相似理论及换算方法。
二、课程内容、基本要求与学时分配(一)船舶操纵性(20学时)1绪论,坐标系,操纵运动方程,水动力导数定义与物理意义2船舶对操舵的响应3舵设计4船舶操纵性试验(二)船舶耐波性(20学时)1波浪与船舶摇荡运动概要2船舶摇荡运动3船舶在不规则波中摇荡运动/谱分析法4减摇方法与减摇装置三、课程的其它教学环节实验内容与基本要求:四、说明1本课程的先修课程为《理论力学、船舶流体力学》2教学试验部分只讲数据分析方法3其他试验内容在“船舶与海洋工程性能试验技术”中完成。
五、课程使用的教材和主要参考书使用教材:《船舶操纵性与耐波性》吴秀恒著,人民交通出版社教学大纲制订者:王少新2004年 8月。
三体船操纵与横摇耦合运动试验与分析船舶在航行过程中,由于涉及到复杂的水动力学问题,船体的运动也会受到多种因素的影响,而横摇是其中比较典型的一种运动形式。
因此,对于舰艇进行操纵和控制时,必须充分考虑到船体的横摇运动,并采取相应的措施,以保证船舶的安全性和航行效率。
在本文中,将介绍一种船舶操纵与横摇耦合运动试验与分析。
一、试验目的本次试验的目的是探讨船舶操纵与横摇耦合运动的特性,并对其进行分析。
通过试验,可以得到以下方面的参考数据:1. 船舶在不同操纵条件下的横摇幅度、周期和频率等参数。
2. 不同操纵条件下的船舶横向加速度及姿态角等参数。
3. 分析船舶操纵与横摇的耦合特性,探究操纵对横摇的影响以及如何通过操纵来控制和减小船舶的横摇运动。
二、试验方法本次试验采用的是真实船舶模型,通过在水槽中设置波浪平台来模拟船舶在风浪条件下的横摇运动。
试验过程中将记录下来船舶的操纵动作,如舵角、推进力等参数,并通过惯性测量系统来实时记录船舶姿态、速度、加速度等数据,最终利用Matlab等工具进行数据分析和处理。
三、试验结果在试验过程中,分别对舵角、速度等操纵参数进行多次试验,得到了相应的实验数据。
其中,船舶的横摇振幅和周期与船速和船舶构型等因素都有关系,试验结果如下:1. 船速对横摇振幅的影响:当船速较低时,横摇振幅较小,随着船速增加,横摇振幅逐渐增大,达到一个最大值后开始逐渐减小。
2. 船舶构型对横摇振幅的影响:在相同的船速下,不同平台宽度的船舶,横摇振幅也有所不同。
当平台宽度较小时,横摇振幅会比较大,而平台较宽时则会有所减小。
3. 操纵对横摇的影响:若未加任何操纵时,船舶的横摇运动会明显增大,而操纵动作(如舵角)的变化可以对横摇进行控制和调节,减小横摇的振幅和周期。
四、分析和结论通过对试验结果的分析,得出了以下结论:1. 横摇运动受多种因素的影响,如船速、船舶构型等因素都会影响横摇振幅和周期的大小。
2. 操纵动作可以帮助减小船舶的横摇振幅和周期,调节范围也受舵盘角度的限制。
船舶操纵与摇荡期末总复习考试题目类型:1. 名词解释(5题)2. 填空(10题左右,空不限)3. 画图题(1~2题左右)4. 简答题(5~6题左右)5. 计算分析题(2题)考试内容(操纵性):第一章绪论1. 操纵性的定义?操纵性包括哪些方面的内容?答:所谓操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
船舶操纵性包括以下四方面内容:A、航向稳定性:它是指船舶在水平面内的运动受扰动而偏离平衡位置,当扰动完全消除后,保持原有航向运动的性能;B、回转性:它是指船舶应舵作圆弧运动的性能;C、转首性及跟从性:它是指船舶应舵转首及迅速进入新的稳定运动状态的性能。
前者称为转首性,后者称为跟从性;D、停船性能:它是指船舶对惯性停船和倒车停船的响应性能。
第2章船舶操纵1、描述船舶运动的坐标系?什么是首向角、漂角以及航速角(定义及正负号)?答:为了描述船舶的运动,我们常采用一下两种右手坐标系:a、固定坐标系Oxyz,它是固定在地球表面的右手坐标系,其原点O可以任意选择,通常与t=0时船舶重心G的位置相一致。
Xy平面位于静水面内,z轴垂直向下为正。
b、运动坐标系Gxyz,它是以船舶重心位置G为原点而固定于船体上的直角坐标系。
x、y和z轴分别是经过G的水线面、横剖面和中纵剖面的郊县,x轴向首为正,z轴向下为正。
首向角:船舶的重心位置和船舶中纵剖面与x轴交角,称为首向角。
由x轴转到中纵剖面顺时针为正。
漂角:船舶重心处的速度矢量V与x轴正方向的交角称为漂角,规定由速度矢量转到x 轴顺时针方向为正。
航速角:Xo轴到V的夹角,顺时针为正。
2、水动力导数(回答要全面)?水动力模型?水动力导数的物理意义(位置导数、旋转导数、角加速度导数以及舵导数,要求会分析其正负号)答:水动力导数:水动力模型:3. 船舶运动稳定性包含哪三部分?(直线、方向、位置,其相互之间的关系)答:直线稳定性:船舶受瞬时扰动后,最终能恢复直线航行状态,但航向发生变化;方向稳定性:船舶受扰后,新航线为与原航线平行的另一直线;位置稳定性:船舶受扰后,最终仍按原航线的延长线航行。

规则波中船舶操纵与垂荡、纵摇耦合运动模拟与特性分析刘桂峰;伍洁;陈俊烽【摘要】采用MMG分离模型的思路,在船舶六自由度操纵性运动方程中叠加波浪垂荡力和纵摇力矩,构成波浪中船舶操纵与垂荡、纵摇耦合动力学模型,用来模拟规则波中船舶操纵与垂荡、纵摇耦合运动特性.其中的波浪力由切片法计算,船舶航向保持采用PD控制模式.采用耦合动力学模型计算了某船在规则波中保持航向时的垂荡、纵摇运动,并与试验结果进行了比较.两者的幅频曲线形式上基本一致,间接证明了耦合动力学模型的有效性.进而采用该模型计算了该船在不同浪向角和航速下保持航向稳定的垂荡、纵摇运动,以垂荡、纵摇等值极坐标曲线形式表征了船舶规则波浪中操纵与垂荡、纵摇的耦合运动特性.%By uniting manoeuvring motion equations of six degrees of freedom and heave force and pitch moment of a ship in regular waves, ship dynamic model was constructed, in which MMG model in calm water was adopted and heave force and pitch moment were calculated with strip method, and proportional & differential control model was used for keeping course. Based on the above model, the coupling motion of heave and pitch for a ship keeping course in regular waves are simulated. The calculated results had good agreement with model test on amplitude-frequency response, which indirectly proved the effectiveness of coupling dynamic model. Furthermore, with different wave angle and ship speed, the coupling motion of heave and pitch for a ship in regular waves are simulated, and the characteristics of which are obtained in the form of amplitude isoline in polar coordinates.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)024【总页数】7页(P5863-5869)【关键词】船舶工程;操纵性;规则波;切片法;耦合特性【作者】刘桂峰;伍洁;陈俊烽【作者单位】海军工程大学船舶与动力学院,武汉430033;海军工程大学船舶与动力学院管理工程系,武汉430033;海军工程大学船舶与动力学院,武汉430033【正文语种】中文【中图分类】U661.33船舶静水中的操纵性研究目前已建立了一套较为完善的理论计算方法和试验方法,用于船舶的初步设计阶段中预报船舶操纵性[1—4],解决各种工程问题。
2. 碰撞后的应急操船措施333.抢滩34四、海上搜救34(1)单旋回(single turn) 34(2)Williamson 旋回(Williamson turn) 35(3)Scharnow 旋回(Scharnow turn) 35第一章船舶操纵绪论1.船舶操纵定义船舶操纵分为常规操纵和应急操纵两大类。
常规操纵包括用小舵角保持航向、中等舵角改变航向以及加速减速操纵;应急操纵包括用大舵角进行旋回的用全速倒车进行进行紧急停船。
还包括侧推设备和拖船协助。
2.研究内容船舶受控运动规律、船舶操纵安全标准、港口设计航道工程以及其他水工设施。
3.船舶分类小型船舶:一万吨以下;中型船舶:3-5万吨;大型船舶:载重吨8万吨以上、船长250米以上的船舶。
20万吨VLCC 30万吨ULCC。
4.船舶数据杂货船船速一般为13-18节方形系数为0.65-0.7散货船船速一般为12-17节方形系数为0.8-0.85油船船速一般为12-16节方形系数为0.8-0.85集装箱船船速14-25节方形系数0.5-0.75.船舶运动学参数船舶运动学参数包括位置、船速、漂角、转向角、角速度等。
漂角是指船舶重心处的船速矢量与船舶首位线之间的交角,漂角等于横向速度比纵向速度的反正切。
航向角是指水平面内船舶首尾线与固定坐标系X轴的交角。
船舶转动时,如果船上的每一点都绕某一垂线做圆周运动,这一垂线称为转轴,转轴与船舶首尾线的交点叫做转心。
定常旋回时,一般转心在船首之后约三分之一船长处。
船舶存在尾倾时转心向后移动。
在转心处只有平动没有转动。
转心处的漂角为0.只有纵向速度。
6.船舶操纵运动方程7.附加质量和附加惯性矩物体在流体中变速运动,推动物体的力不仅要为增加物体的动能做功,还要为增加周围流体的动能做功。
因此质量为m的物体要获得加速度a,施加在它上面的力F将大于物体质量m与加速度a的乘积,增加的这部分质量就是附加质量。
若写为公式,则:,称为该物体的附加质量。
船舶的摇摆控制大型集装箱船首部与尾部的形状差别很大,所以当船舶在波浪区域航行,沿船长方向出现波峰和波谷时,很容易导致船舶扶正力臂的变化,故要特别关注船舶的摇摆参数-周期和幅度,一艘船的扶正力矩是扶正力臂与总重量的乘积。
船舶在顺水或逆水前进时,其横摇和纵倾是呈周期性的变化,其扶正力臂也呈周期性的变化。
正是因为这种现象,导致船舶的扶正力矩也随之发生变化,从而引发了船舶的摇摆。
而这种以时间为变量参数的摇摆,如果遇上合适的海浪情况,就有可能引发船舶共振现象,这时船舶的摇摆角度加大,导致货物和集装箱的灭失,极端的情况下,可能使船体结构遭受破坏。
最近几年来,集装箱船的事故,就反映出这种现象的危险性。
人们都知道一个现象,船舶在低速航行时,如果恰巧在某一时间操舵、遇到阵风或其它因素的影响时而引起船舶附近的波浪发生变化,当其频率较低时(仅为船舶自身摇摆周期的一半),有可能导致船舶摇摆的角度很大。
对大型集装箱船,在一定的海况下就有可能产生周期性的摇摆,如在北太平洋和北大西洋一年中分别有9%和12%时间里存在着导致这种现象发生的海况。
实事上,如果在船舶上安装一个减摇系统,适时地给船舶外加一个恰当的阻尼,来抵消船舶扶正力矩的变化,摇摆是可以加以预防的。
德国的Interring公司生产的IPRP装置就是这种想法在实船上的应用。
这套装置采用众所周知的自控式减摇水舱技术,其核心部分是减摇水舱系统。
两个水舱分别布置于船舶的左右舷,在船体上设置一个通道,将两个水舱相互连通,形成U型水舱。
减摇水舱中充入一定量的水,注水量应根据水舱形状、船舶装载情况和航线情况来确定。
其原理是使水舱内的水的运动周期和船舶在波浪上的摇摆周期相近,保证在船舶摇摆时,两个液舱能形成一定的水位差,以便形成一个扶正力矩,以扶正力矩抵消波浪所产生的倾斜力矩,达到减小船舶的摇摆幅度。
一套典型的船舶IPRP系统应由几对液舱、一个气动的空气阀和一套控制单元组成,控制单元中包括船舶纵倾和横摇传感器。
船舶操纵与摇荡————————————————————————————————作者:————————————————————————————————日期:船舶操纵与摇荡期末总复习考试题目类型:1. 名词解释(5题)2. 填空(10题左右,空不限)3. 画图题(1~2题左右)4. 简答题(5~6题左右)5. 计算分析题(2题)考试内容(操纵性):第一章绪论1. 操纵性的定义?操纵性包括哪些方面的内容?答:所谓操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
船舶操纵性包括以下四方面内容:A、航向稳定性:它是指船舶在水平面内的运动受扰动而偏离平衡位置,当扰动完全消除后,保持原有航向运动的性能;B、回转性:它是指船舶应舵作圆弧运动的性能;C、转首性及跟从性:它是指船舶应舵转首及迅速进入新的稳定运动状态的性能。
前者称为转首性,后者称为跟从性;D、停船性能:它是指船舶对惯性停船和倒车停船的响应性能。
第2章船舶操纵1、描述船舶运动的坐标系?什么是首向角、漂角以及航速角(定义及正负号)?答:为了描述船舶的运动,我们常采用一下两种右手坐标系:a、固定坐标系Oxyz,它是固定在地球表面的右手坐标系,其原点O可以任意选择,通常与t=0时船舶重心G的位置相一致。
Xy平面位于静水面内,z轴垂直向下为正。
b、运动坐标系Gxyz,它是以船舶重心位置G为原点而固定于船体上的直角坐标系。
x、y和z轴分别是经过G的水线面、横剖面和中纵剖面的郊县,x轴向首为正,z轴向下为正。
首向角:船舶的重心位置和船舶中纵剖面与x轴交角,称为首向角。
由x轴转到中纵剖面顺时针为正。
漂角:船舶重心处的速度矢量V与x轴正方向的交角称为漂角,规定由速度矢量转到x 轴顺时针方向为正。
航速角:Xo轴到V的夹角,顺时针为正。
2、水动力导数(回答要全面)?水动力模型?水动力导数的物理意义(位置导数、旋转导数、角加速度导数以及舵导数,要求会分析其正负号)答:水动力导数:水动力模型:3. 船舶运动稳定性包含哪三部分?(直线、方向、位置,其相互之间的关系)答:直线稳定性:船舶受瞬时扰动后,最终能恢复直线航行状态,但航向发生变化;方向稳定性:船舶受扰后,新航线为与原航线平行的另一直线;位置稳定性:船舶受扰后,最终仍按原航线的延长线航行。
显然,具有位置稳定性必同时具有方向和直线稳定性,具有方向稳定性必同时具有直线稳定性。
反之,若不具有直线稳定性,也不可能具有方向和位置稳定性。
4. 稳定性横准数C(直线稳定性的判断条件)?(试从稳性衡准数C的表达式分析影响稳定性的因素,并分析如何改善船舶的直线稳定性。
)答:直线稳定性的条件归结为:C=YvNr-Nv(Yr-mu1)>0,该式为稳定性横准式,系数C 称为稳定性横准数。
C>0表示船舶具有直线稳定性,C<0表示不具有直线稳定性。
如只要判断船舶是否具有直线稳定性,不必去求、,只要判断C的正负即可。
在深水中,Yrr小于mu1r(离心力),故原式可以改写成:Nv/Yv<Nr/(Yr-mu1)。
不等式两边都具有力臂的因次,左边项称为位置力臂,用lv表示,右边项称为阻尼力臂,用lr表示,因此,直线稳定性的条件也可表示为:lv<lr。
使船体水线以下侧投影面积(中纵剖面面积)向首、尾两端分布,可使|Nr|增大,即lr 增大,对稳定性有利。
但首部面积增大,使侧面积中心向前移动,|Nv|增啊,lv也增大,对稳定性不利。
只有增大尾部面积,如采用增加尾倾,增大呆木或尾鳍面积,既可使|Nr|增大,也可使|Nv|,减小,可改善稳定性。
反之,若为了改善其他性能,必须损失一些稳定性时,可采用削小呆木,呆木开孔,增加首踵等措施。
5. 船舶回转运动的基本概念(回转圈、回转运动的三个阶段、定常回转直径、反横距、回转枢心)?答:直线航行的船舶,将舵转至某一舵角,并保持此舵角,船将做曲线运动,称为回转运动。
船舶重心的运动轨迹称为回转圈。
回转运动的三个阶段:(1)转舵阶段:船舶从开始执行转舵命令起到实现命令舵角止的阶段(大约8—15秒时间),称为转舵阶段;(2)过渡阶段:从转舵终止到船舶进入定常回转的中间阶段,称为过渡阶段;(3)定常阶段:在回转运动中,过渡阶段终了,船舶运动参数开始稳定,达到新的平衡阶段,称为定常阶段。
定常回转直径:在回转运动中,船舶进入定常阶段后的回转圈的直径称为定常回转直径。
满舵条件下的定常回转直径称为最小回转直径。
定常回转直径与船长的比值称为相对回转直径。
反横距K:船舶离开初始直线航线向回转中心的反侧横移的最大距离称为反横距。
通常K=(0-0.1)D。
回转枢心:船舶做回转运动时,在某一瞬时,船舶中纵剖面上各点的速度大小和方向是不同的,中纵剖面上漂角为零的点,即在该点上速度的方向与中纵剖面相一致,横向速度为零,称为回转枢心。
6. 回转时产生速降的原因?(阻力和推进两方面)答:船舶在小舵角回转时,漂角很小,航速变化也不大。
但在满舵回转时,漂角增大,因而使船舶前进阻力增大,离心力的前进方向分量也大大消耗了桨的推力,另一方面桨的工作条件改变,转速略有下降,效率也会降低,造成船舶前进速度显著减小,其减小量可达回转初速的40%左右,称为回转速降。
7. 回转过程中横倾角的变化?(内倾—外倾,要求会分析:舵力,流体惯性力以及离心力)答:在转舵阶段,回转轨迹的曲率中心在回转圈外侧,作用于船体的主要是多里和横向惯性力以及它们对重心的力矩,结果使船发生向回转圈一侧的内倾。
由于舵力较小,一般来说,传的内倾角是不大的;在过渡阶段,漂角和角速度不断增加,作用于船体上的水动力亦不断增大,逐渐由次要作用变为主要作用,船舶由内倾变为外倾,到定常阶段形成稳定的横倾角。
实际上,水动力的增加是很快的,在使船由内倾转为外倾的倾侧力矩的迅速作用下,船舶所能达到的最大横倾角要大于定常阶段的稳定横倾角,并在1-2次摇摆之后最终稳定于值。
的大小与转舵时间有关,转舵时间越短,越大。
8. 一阶K-T方程?(操纵性良好的船应该具有怎样的K、T指数;为什么直线稳定性好的船回转性差;应采取怎样的措施可以在保证直线稳定性的前提下改善船舶的回转性?)答:操纵性良好的船应具有:大的正K值,小的正T值,大的P值。
措施:增加舵面积(即增加和的绝对值)或将舵远离船舶重心(即增加的数值),能够使K增大,回转性变好,而又不损害直线稳定性。
9. 回转性、转首性以及跟从性的区别?(半径大小;航向改变容易困难;进入新状态快慢)10. 船舶操纵性试验有哪些?(回转试验、Z形操纵试验、螺线试验、逆螺线试验以及回舵试验)答:操纵性试验分为模型试验和实船试验两种,模型试验又可分为自由自航模操纵性试验和约束模操纵性试验两种。
P29711. 换舵首向角、转首滞后的定义?答:换舵首向角:转首滞后:12. 如何由试验结果判断船舶的操纵性?(实验结果图)第3章舵的设计1. 舵的几何要素?(舵面积、舵高、舵宽、展弦比、平衡比、厚度比以及舵剖面)答:舵面积:用表示,指未转动的舵叶轮廓在中纵剖面上的投影面积;舵高:用h 表示,为沿舵杆轴线方向,舵叶上缘至下缘的垂直距离;舵宽:用b表示,为舵叶前、后缘之间的水平距离;展弦比:用表示,指舵高与舵宽之比值;平衡比:又称平衡系数,用e表示,指舵杆轴线前的舵面积与整个舵面积的比值;厚度比:用表示,舵剖面的最大厚度与舵宽的比值;面积比:用表示,舵面积与船体垂线间长和设计吃水d的乘积之比值;舵剖面:指与舵杆轴线垂直的舵叶剖面。
2.舵的分类?特种操纵装置?答:舵可以概括的分为普通舵与特种舵,普通舵都是被动舵,即在相对来流速度作用下才产生舵力和转船力矩,没有相对来流速度也就没有舵效。
普通舵可以根据不同特点分成下述一些类型:根据舵的支承情况,分为多支承舵、双支承舵、半悬挂舵和悬挂舵四种;根据舵的剖面形状,可分为平板舵和流线型舵;根据舵杆轴线的舵宽度上的位置可分为不平衡舵、平衡舵和半平衡舵(即半悬挂式半平衡舵)。
考试内容(耐波性):第1章耐波性概述1、耐波性的定义?答:船舶耐波性是船舶在波浪中运动特性的统称,它包括船舶在波浪中所产生的各种摇荡运动以及由这些运动引起的砰击、飞溅、上浪、失速、螺旋桨飞车和波浪弯矩变化等性能,直接影响船舶在风浪作用下维持其正常功能的能力。
2、船舶在波浪中有几种运动形式?其中对船舶航行影响最大的是?答:当遭遇浪向在左、右舷0°—15°之间时称为顺浪。
遭遇浪向在左、右舷165°—180°之间时称为顶浪。
顺浪和顶浪统称纵向对浪,纵向对浪主要产生纵向运动,它包括纵摇、纵荡和垂荡,其中主要是纵摇和垂荡。
遭遇浪向在左、右舷75°—105°时称为横浪。
横浪主要产生横向运动,它包括横摇、首摇和横荡,其中主要是横摇。
遭遇浪向在左、右舷15°—75°时称为尾斜浪。
遭遇浪向在左、右舷105°—165°时称为首斜浪。
尾斜浪和首斜浪既产生纵向运动,也产生横向运动。
其中对船舶航行影响最大的是横摇、纵摇和垂荡。
3. 耐波性基本概念?(砰击、上浪、失速、螺旋桨飞车)答:砰击:由于严重的纵摇和垂荡,船体与风浪之间产生猛烈的局部冲击现象称为砰击。
砰击多发生在船首部。
砰击发生时首柱底端或船底露出水面,然后在极短的时间内以较大的速度落入水中和发生猛烈的撞击。
上浪:船舶在风浪中剧烈摇荡时风浪涌上甲板的现象称为上浪。
上浪时船首常常埋入风浪中,海水淹没首部甲板边缘,甲板上水。
上浪主要是由严重的纵摇和垂荡引起的。
失速:它包括风浪失速和主动减速。
风浪失速是指推进动力装置功率调定后,由于剧烈的摇荡,船舶在风浪中较静水中航行时航速的降低值。
主动减速是指船舶在风浪中航行,为了减小风浪对船舶的不利影响,主动调低主机功率,使航速比静水中速度下降的数值。
螺旋桨飞车:船舶在风浪中航行时,部分螺旋桨叶露出水面,转速剧增,并伴有剧烈振动的现象称为螺旋桨飞车。
第2章海浪与统计分析1.海浪的分类?影响风浪大小的三要素?答:海浪大致分为三类:(1)风浪:它是在风直接作用下产生的,表面看来极不规则的海浪,也叫不规则波,是船舶航行中最经常遇到的一种海浪。
(2)涌浪:它是由其他风区传来的波,或由于当地的风力急剧下降,风向改变或风平息之后形成的海浪。
涌的形态和排列比较规则,波及的区域也比较大。
在一个海区内常见风暴未到而涌先到,或者风暴已过仍存在涌。
(3)近岸浪:当水深小于波长的1/2时,在海岸与浅滩附近所形成的波浪。
由于涌的形状比较规则,它可以近似的用规则波来表示,例如余弦波。
影响风浪大小的三要素:(1)风速,即在水面规定高度上风的前进速度;(2)风时,即稳定状态的风在水面上吹过的持续时间;(3)风区长度,即风接近于不变的方向和速度在开敞水面上吹过的距离。