哈夫变换和Canny边缘检测算法及其实现代码
- 格式:doc
- 大小:81.00 KB
- 文档页数:14
canny边缘检测matlab代码Canny边缘检测是一种常用的图像处理算法,它可以有效地检测图像中的边缘,并将其显示为白色线条。
在Matlab中,可以使用以下代码实现Canny边缘检测:1. 读取图像首先,需要读取待处理的图像。
可以使用imread函数来读取图片:```matlabimg = imread('image.jpg');```其中,image.jpg是待处理的图片文件名。
2. 灰度化Canny算法只能处理灰度图像,因此需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数来实现:```matlabgray_img = rgb2gray(img);```3. 高斯滤波在进行边缘检测之前,需要对图像进行高斯滤波来消除噪声。
可以使用fspecial和imfilter函数来实现:```matlabgaussian_filter = fspecial('gaussian', [5 5], 1);blur_img = imfilter(gray_img, gaussian_filter, 'replicate');```其中,[5 5]表示高斯核的大小为5x5,1表示标准差。
4. 计算梯度幅值和方向接下来,需要计算每个像素点的梯度幅值和方向。
可以使用Sobel算子来计算梯度,并利用arctan函数计算方向角度:```matlabsobel_x = [-1 0 1; -2 0 2; -1 0 1];sobel_y = [-1 -2 -1; 0 0 0; 1 2 1];grad_x = imfilter(blur_img, sobel_x, 'replicate');grad_y = imfilter(blur_img, sobel_y, 'replicate');grad_mag = sqrt(grad_x.^2 + grad_y.^2);grad_dir = atan(grad_y ./ grad_x);```5. 非极大值抑制由于Sobel算子计算出的梯度幅值可能会有多个峰值,因此需要进行非极大值抑制来保留边缘。
霍夫变换是一种用于图像处理中的技术,主要用于检测图像中的直线、圆或其他简单的几何形状。
下面是一个Python代码示例,它使用OpenCV库的`HoughLines`函数进行霍夫直线检测。
```pythonimport cv2import numpy as np# 读取图像img = cv2.imread('image.jpg')# 转换为灰度图像gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 使用Canny边缘检测edges = cv2.Canny(gray, 50, 150, apertureSize = 3)# 使用Hough变换检测直线lines = cv2.HoughLines(edges, 1, np.pi / 180, 200)# 在图像上绘制检测到的直线for line in lines:rho, theta = line[0]a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rhox1 = int(x0 + 1000 * (-b))y1 = int(y0 + 1000 * (a))x2 = int(x0 - 1000 * (-b))y2 = int(y0 - 1000 * (a))cv2.line(img, (x1, y1), (x2, y2), (0, 0, 255), 2)# 显示结果cv2.imshow('image', img)cv2.waitKey(0)cv2.destroyAllWindows()```这个代码首先读取一个图像,然后将其转换为灰度图像。
然后,它使用Canny边缘检测算法来找到图像中的边缘。
最后,它使用`cv2.HoughLines`函数来检测这些边缘构成的直线。
检测到的每一条直线都在原始图像上绘制出来。
请注意,这个代码的参数可能需要根据您的具体图像和需求进行调整。
Canny算子提取边缘Matlab源代码介绍function e=canny_edge(I,sigma)%functione=edge(I,'canny',thresh,sigma);%该函数实现Canny算子提取边缘点%输入图像为I,标准差sigma,输出为边缘图像e[m,n]=size(I);Rr=2:m-1;cc=2:n-1;e=repmat(logical(uint8(0)),m,n);%产生同样大小的边缘图像e,初始化为1 ,即初始化边缘GaussianDieOff=-0.001;%设定高斯函数消失门限PercentOfPixelsNotEdges=-7;%用于计算边缘门限ThresholdRatio=-4;%设置两个门限的比例%首先设计高斯滤波器和它的微分pw=1:30;%设定滤波器宽度ssq=sigma*sigma;%计算方差width=max(find(exp(-(pw.*pw)/(2*sigma*sigma))>GaussianDieOff)); %计算滤波算子宽度t=(-width:width);len=2*width+1;t3=[t-.5;t;t+.5];%对每个像素左右各半个像素位置的值进行平均gau=sum(exp(-(t3.*t3)/(2*ssq))).'/(6*pi*ssq);%一维高斯滤波器dgau=(-t.*exp(-(t.*t)/(2*ssq))/ssq).';%高斯滤波器的微分ra=size(I,1);ca=size(I,2);ay=255*double(I);ax=255*double(I');h=conv(gau,dgau);%利用高斯函数滤除噪声和用高斯算子的一阶微分对图像滤波合并为一个算子ax=conv2(ax,h,'same').';%产生x方向滤波ay=conv2(ay,h,'same');%产生y方向滤波mag=sqrt((ax.*ax)+(ay.*ay));%计算滤波结果的幅度magmax=max(mag(:));if magmax>0mag=mag/magmax;%对滤波幅度进行归一化end%下面根据滤波幅度的概率密度计算滤波门限[counts,x]=imhist(mag,64);%计算滤波结果的幅度的直方图highThresh=min(find(cumsum(counts)>PercentOfPixelsNotEdges*m*n))/64; %通过设定非边缘点的比例来确定高门限lowThresh=ThresholdRatio*highThresh;%设置低门限为高门限乘以比例因子thresh=[lowThresh,highThresh];%下面进行非极大抑制%大于高门限的点归于强边缘图像%小于低门限的点归于弱边缘图像idxStrong=[];for dir=1:4idxLocalMax=cannyFindLocalMaxima(dir,ax,ay,mag); idxWeak=idxLocalMax(mag(idxLocalMax)>lowThresh);e(idxWeak)=1;idxStrong=[idxStrong;idxWeak(mag(idxWeak)>highThresh)]; endrstrong=rem(idxStrong-1,m)+1;%rem是求余数cstrong=floor((idxStrong-1)/m)+1;%向-∞取整e=bwselect(e,cstrong,rstrong,8);%通过形态学算子将两幅图像的边缘进行连接(资料素材和资料部分来自网络,供参考。
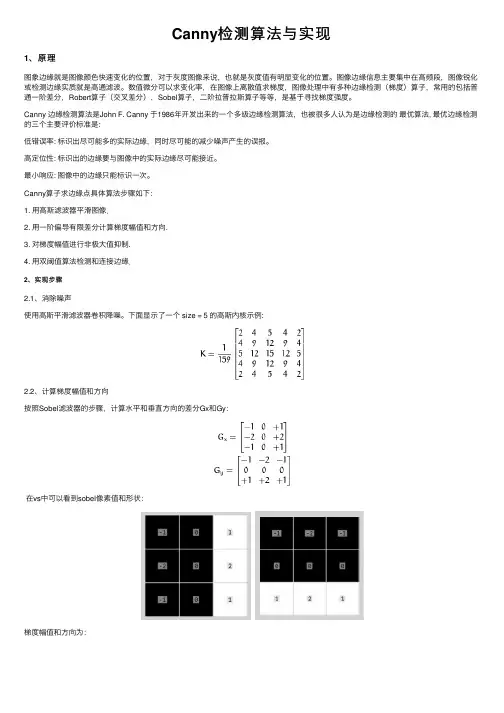
Canny检测算法与实现1、原理图象边缘就是图像颜⾊快速变化的位置,对于灰度图像来说,也就是灰度值有明显变化的位置。
图像边缘信息主要集中在⾼频段,图像锐化或检测边缘实质就是⾼通滤波。
数值微分可以求变化率,在图像上离散值求梯度,图像处理中有多种边缘检测(梯度)算⼦,常⽤的包括普通⼀阶差分,Robert算⼦(交叉差分),Sobel算⼦,⼆阶拉普拉斯算⼦等等,是基于寻找梯度强度。
Canny 边缘检测算法是John F. Canny 于1986年开发出来的⼀个多级边缘检测算法,也被很多⼈认为是边缘检测的最优算法, 最优边缘检测的三个主要评价标准是:低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产⽣的误报。
⾼定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
最⼩响应: 图像中的边缘只能标识⼀次。
Canny算⼦求边缘点具体算法步骤如下:1. ⽤⾼斯滤波器平滑图像.2. ⽤⼀阶偏导有限差分计算梯度幅值和⽅向.3. 对梯度幅值进⾏⾮极⼤值抑制.4. ⽤双阈值算法检测和连接边缘.2、实现步骤2.1、消除噪声使⽤⾼斯平滑滤波器卷积降噪。
下⾯显⽰了⼀个 size = 5 的⾼斯内核⽰例:2.2、计算梯度幅值和⽅向按照Sobel滤波器的步骤,计算⽔平和垂直⽅向的差分Gx和Gy:在vs中可以看到sobel像素值和形状:梯度幅值和⽅向为:梯度⽅向近似到四个可能⾓度之⼀(⼀般 0, 45, 90, 135)。
2.3、⾮极⼤值抑制⾮极⼤值抑制是指寻找像素点局部最⼤值。
sobel算⼦检测出来的边缘太粗了,我们需要抑制那些梯度不够⼤的像素点,只保留最⼤的梯度,从⽽达到瘦边的⽬的。
沿着梯度⽅向,⽐较它前⾯和后⾯的梯度值,梯度不够⼤的像素点很可能是某⼀条边缘的过渡点,排除⾮边缘像素,最后保留了⼀些细线。
在John Canny提出的Canny算⼦的论⽂中,⾮最⼤值抑制就只是在0、90、45、135四个梯度⽅向上进⾏的,每个像素点梯度⽅向按照相近程度⽤这四个⽅向来代替。
分享到:2012-04-24 20:42网友采纳clcclear allclose allI = imread('cameraman.tif'); % 读入图像imshow(I);title('原图')BW1 = edge(I,'canny'); % 调用canny函数figure,imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny')用Lena标准检测图像,图像与代码下面注明了是哪张图像。
一、没有噪声时的检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测二、加入高斯噪声(μ=0,σ^2=0.01)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测三、加入高斯噪声(μ=0,σ^2=0.02)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测clear all; close all;warning off all;I = imread('lena.bmp'); %%如果是其他类型图像,请先转换为灰度图%%没有噪声时的检测结果BW_sobel = edge(I,'sobel');BW_prewitt = edge(I,'prewitt');BW_roberts = edge(I,'roberts');BW_laplace = edge(I,'log');BW_canny = edge(I,'canny'); figure(1);subplot(2,3,1),imshow(I),xlabel('原始图像');subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.01)检测结果I_g1 = imnoise(I,'gaussian',0,0.01);BW_sobel = edge(I_g1,'sobel');BW_prewitt = edge(I_g1,'prewitt');BW_roberts = edge(I_g1,'roberts');BW_laplace = edge(I_g1,'log');BW_canny = edge(I_g1,'canny'); figure(2);subplot(2,3,1),imshow(I_g1),xlabel('加入高斯噪声(μ=0,σ^2=0.01)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.02)检测结果I_g2 = imnoise(I,'gaussian',0,0.02);BW_sobel = edge(I_g2,'sobel');BW_prewitt = edge(I_g2,'prewitt');BW_roberts = edge(I_g2,'roberts');BW_laplace = edge(I_g2,'log');BW_canny = edge(I_g2,'canny'); figure(3);subplot(2,3,1),imshow(I_g2),xlabel('加入高斯噪声(μ=0,σ^2=0.02)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');199条建筑设计知识1. 公共建筑通常以交通、使用、辅助三种空间组成2. 美国著名建筑师沙利文提出的名言‘形式由功能而来’3. 密斯.凡.德.罗设计的巴塞罗那博览会德国馆采用的是‘自由灵活的空间组合’开创了流动空间的新概念4. 美国纽约赖特设计的古根海姆美术馆的展厅空间布置采用形式是串联式5. 电影放映院不需采光6. 点式住宅可设天井或平面凹凸布置可增加外墙面,有利于每层户数较多时的采光和通风7. 对结构形式有规定性的有大小和容量、物理环境、形状的规定性8. 功能与流线分析是现代建筑设计最常用的手段9. 垂直方向高的建筑需要考虑透视变形的矫正10. 橙色是暖色,而紫色含有蓝色的成分,所以偏冷;青色比黄色冷、红色比黄色暖、蓝色比绿色冷11. 同样大小冷色调较暖色调给人的感觉要大12. 同样距离,暖色较冷色给人以靠近感13. 为保持室内空间稳定感,房间的低处宜采用低明度色彩14. 冷色调给人以幽雅宁静的气氛15. 色相、明度、彩度是色彩的三要素;三元色为红、黄、蓝16. 尺度的概念是建筑物整体或局部给人的视角印象大小和其实际大小的关系17. 美的比例,必然正确的体现材料的力学特征18. 不同文化形成独特的比例形式19. 西方古典建筑高度与开间的比例,愈高大愈狭长,愈低矮愈宽阔20. ‘稳定’所涉及的要素是上与下之间的相对轻重关系的处理21. 人眼观赏规律H 18°~45°局部、细部2H 18°~27°整体3H <18°整体及环境22. 黄金分隔比例为1:1.61823. 通风屋面只能隔离太阳辐射不能保温,适宜于南方24. 总图布置要因地制宜,建筑物与周围环境之间关系紧凑,节约因地;适当处理个体与群体,空间与体形,绿化和小品的关系;合理解决采光、通风、朝向、交通与人流的组织25. 热水系统舒适稳定适用于居住建筑和托幼蒸汽系统加热快,适用于间歇采暖建筑如会堂、剧场26. 渐变具有韵律感27. 要使一座建筑显得富有活力,形式生动,在构图中应采用对比的手法对比的手法有轴线对比、体量对比、方向对比、虚实对比、色彩对比28. 要使柱子看起来显得细一些,可以采用暗色和冷色29. 巴西国会大厅在体型组合中采用了对比与协调的手法30. 展览建筑应使用穿套式的空间组合形式31. 室外空间的构成,主要依赖于建筑和建筑群体组合32. 在意大利威尼斯的圣马可广场的布局中,采用了强调了各种空间之间的对比33. 当坡地坡度较缓时,应采用平行等高线布置34. 建筑的有效面积=建筑面积-结构面积35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽51. 入地下车库的坡道端部宜设挡水反坡和横向通长雨水篦子52. 室内台阶宜150*300;室外台阶宽宜350左右,高宽比不宜大于1:2.553. 住宅公用楼梯踏步宽不应小于0.26M,踏步高度不应大于0.175M54. 梯段宽度不应小于1.1M(6层及以下一边设栏杆的可为1.0M),净空高度2.2M55. 休息平台宽度应大于梯段宽度,且不应小于1.2M,净空高度2.0M56. 梯扶手高度0.9M,水平段栏杆长度大于0.5M时应为1.05M57. 楼梯垂直杆件净空不应大于0.11M,梯井净空宽大于0.11M时应采取防护措施58. 门洞共用外门宽1.2M,户门卧室起居室0.9M,厨房0.8M,卫生间及阳台门0.7M,所有门洞高为2.0M59. 住宅层高不宜高于2.8M60. 卧室起居室净高≥2.4M,其局部净高≥2.1M(且其不应大于使用面积的1/3)61. 利用坡顶作起居室卧室的,一半面积净高不应低于2.1M利用坡顶空间时,净高低于1.2M处不计使用面积;1.2--2.1M计一半使用面积;高于2.1M全计使用面积62. 放家具墙面长3M,无直接采光的厅面积不应大于10M263. 厨房面积Ⅰ、Ⅱ≥4M2;Ⅲ、Ⅳ≥5M264. 厨房净宽单面设备不应小于1.5M;双面布置设备间净距不应小于0.9M65. 对于大套住宅,其使用面积必须满足45平方米66. 住宅套型共分四类使用面积分别为34、45、56、68M267. 单人卧室≥6M2;双人卧室≥10M2;兼起居室卧室≥12M2;68. 卫生间面积三件3M2;二件2--2.5M2;一件1.1M269. 厨房、卫生间净高2.2M70. 住宅楼梯窗台距楼地面净高度低于0.9米时,不论窗开启与否,均应有防护措施71. 阳台栏杆净高1.05M;中高层为1.1M(但要<1.2);杆件净距0.1172. 无外窗的卫生间应设置防回流构造的排气通风道、预留排气机械的位置、门下设进风百叶窗或与地面间留出一定缝隙73. 每套应设阳台或平台、应设置晾衣设施、顶层应设雨罩;阳台、雨罩均应作有组织排水;阳台宜做防水;雨罩应做防水74. 寒冷、夏热冬冷和夏热冬暖地区的住宅,西面应采取遮阳措施75. 严寒地区的住宅出入口,各种朝向均应设防寒门斗或保温门76. 住宅建筑中不宜设置的附属公共用房有锅炉房、变压器室、易燃易爆化学物品商店但有厨房的饮食店可设77. 住宅设计应考虑防触电、防盗、防坠落78. 跃层指套内空间跨跃两楼层及以上的住宅79. 在坡地上建住宅,当建筑物与等高线垂直时,采用跌落方式较为经济80. 住宅建筑工程评估指标体系表中有一级和二级指标81. 7层及以上(16米)住宅必须设电梯82. 宿舍最高居住层的楼地面距入口层地面的高度大于20米时,应设电梯83. 医院病房楼,设有空调的多层旅馆,超过5层的公建室内疏散楼梯,均应设置封闭楼梯间(包括首层扩大封闭楼梯间)设歌舞厅放映厅且超过3层的地上建筑,应设封闭楼梯间。
一.Canny边缘检测算法原理JohnCanny于1986年提出Canny算子,属于是先平滑后求导数的方法。
其处理过程大体上分为下面四部分。
1. 对原始图像进行灰度化Canny算法通常处理的图像为灰度图,因此如果获取的是彩色图像,那首先就得进行灰度化。
对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。
以RGB格式的彩图为例,通常灰度化采用的方法主要有:方法1:Gray=(R+G+B)/3;方法2:Gray=0.299R+0.587G+0.114B;(这种参数考虑到了人眼的生理特点)至于其他格式的彩色图像,可以根据相应的转换关系转为RGB然后再进行灰度化;在编程时要注意图像格式中RGB的顺序通常为BGR。
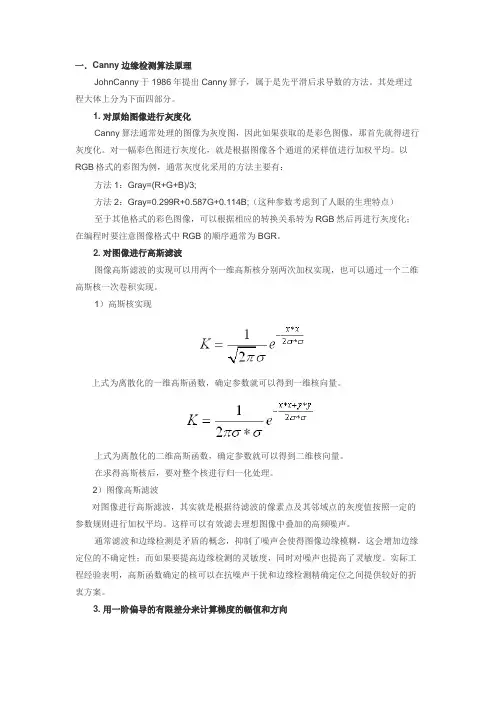
2. 对图像进行高斯滤波图像高斯滤波的实现可以用两个一维高斯核分别两次加权实现,也可以通过一个二维高斯核一次卷积实现。
1)高斯核实现上式为离散化的一维高斯函数,确定参数就可以得到一维核向量。
上式为离散化的二维高斯函数,确定参数就可以得到二维核向量。
在求得高斯核后,要对整个核进行归一化处理。
2)图像高斯滤波对图像进行高斯滤波,其实就是根据待滤波的像素点及其邻域点的灰度值按照一定的参数规则进行加权平均。
这样可以有效滤去理想图像中叠加的高频噪声。
通常滤波和边缘检测是矛盾的概念,抑制了噪声会使得图像边缘模糊,这会增加边缘定位的不确定性;而如果要提高边缘检测的灵敏度,同时对噪声也提高了灵敏度。
实际工程经验表明,高斯函数确定的核可以在抗噪声干扰和边缘检测精确定位之间提供较好的折衷方案。
3. 用一阶偏导的有限差分来计算梯度的幅值和方向关于图像灰度值得梯度可使用一阶有限差分来进行近似,这样就可以得图像在x和y 方向上偏导数的两个矩阵。
常用的梯度算子有如下几种:1)Roberts算子上式为其x和y方向偏导数计算模板,可用数学公式表达其每个点的梯度幅值为:2)Sobel算子上式三个矩阵分别为该算子的x向卷积模板、y向卷积模板以及待处理点的邻域点标记矩阵,据此可用数学公式表达其每个点的梯度幅值为:3)Prewitt算子和Sobel算子原理一样,在此仅给出其卷积模板。
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
matlab中canny边缘检测算法的实现【Matlab中Canny边缘检测算法的实现】引言:边缘检测是计算机视觉和图像处理领域中的一项重要任务,主要用于提取图像中物体的轮廓或边界。
在边缘检测算法中,Canny算法是一种非常经典和常用的方法,由John F. Canny于1986年提出。
该算法被广泛应用于计算机视觉领域,实现了较好的边缘检测效果和低误报率。
本文将详细介绍在Matlab中实现Canny边缘检测算法的步骤和原理。
1. 算法原理:Canny边缘检测算法主要包含以下几个步骤:(1)使用高斯滤波平滑图像,减少噪声的影响。
(2)计算图像的梯度幅值和方向,确定图像中的强边缘。
(3)应用非极大值抑制算法,细化边缘。
(4)通过双阈值处理,进一步筛选边缘像素。
(5)连接边缘像素,得到最终的边缘结果。
2. 算法实现步骤:在Matlab中,我们可以利用内置函数和库函数来实现Canny边缘检测算法。
下面将一步一步介绍具体的实现过程。
2.1 加载图像:首先,我们需要加载一张待处理的图像。
可以使用imread函数加载图像,例如:img = imread('image.jpg');2.2 灰度化处理:Canny算法通常在灰度图像上进行,因此我们需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数实现:grayImg = rgb2gray(img);2.3 高斯滤波:为了减少噪声的影响,我们需要对图像进行平滑处理。
可以使用fspecial函数创建高斯滤波器,然后使用imfilter函数对灰度图像进行滤波。
示例代码如下:filterSize = 5; % 设置滤波器尺寸sigma = 1; % 设置高斯分布的标准差gaussianFilter = fspecial('gaussian', [filterSize filterSize], sigma); smoothImg = imfilter(grayImg, gaussianFilter, 'symmetric');2.4 计算梯度幅值和方向:接下来,我们需要计算图像中每个像素的梯度幅值和方向。
matlabcanny边缘检测代码接霍夫变换全文共四篇示例,供读者参考第一篇示例:Matlab是一个强大的数学软件工具,其图像处理工具箱可以帮助我们进行各种图像处理操作,比如边缘检测和霍夫变换。
本文将分享如何使用Matlab进行Canny边缘检测,并结合霍夫变换进行线检测。
Canny边缘检测是一种经典的边缘检测算法,它的优点是能够检测到边缘的细节,并且对噪声具有一定的鲁棒性。
在Matlab中,我们可以通过一行简单的代码来实现Canny边缘检测:```edgeImage = edge(rgb2gray(image), 'canny');```以上代码中,我们首先将原始图像转换为灰度图像,然后调用Matlab的'edge'函数,并指定边缘检测算法为Canny,最后我们将得到的边缘图像存储在edgeImage中。
接下来,我们可以将边缘图像显示出来,以便进行进一步的处理和分析。
```imshow(edgeImage);通过上述代码,我们可以看到Canny边缘检测算法的效果,边缘比较清晰,同时也保留了边缘的细节信息。
接下来,我们将介绍如何使用霍夫变换来进行线检测。
霍夫变换是一种经典的图像处理算法,其主要应用是检测直线和圆等几何形状。
在Matlab中,我们可以通过一行代码来实现霍夫变换的线检测:```[H,theta,rho] = hough(edgeImage);peaks = houghpeaks(H, 10);lines = houghlines(edgeImage, theta, rho, peaks);imshow(image);hold on;for k = 1 : length(lines)xy = [lines(k).point1; lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');endhold off;以上代码中,我们首先调用Matlab的'hough'函数来计算霍夫变换的极坐标空间。
哈夫变换用于边缘检测的原理哈夫变换是一种常用于边缘检测的图像处理算法,它可以用来检测图像中的直线、圆等特定形状。
哈夫变换的原理是基于数学方法,通过在参数空间进行投票来确定图像中特定形状的参数。
首先,我们需要了解边缘检测的原理。
边缘是图像中颜色或灰度级别突然变化的区域,通常表示物体或背景之间的边界。
边缘检测的目标是在图像中标记出这些边缘。
常用的边缘检测算法有Canny边缘检测、Sobel 算子、Laplacian算子等。
哈夫变换可以用来检测图像中的直线或圆。
以直线检测为例,其原理如下:1.将图像转换为灰度图像,可以利用灰度化方法如RGB到灰度变换或使用彩色图像的一个通道作为灰度图像。
2. 对灰度图像进行边缘检测,可以选择Canny边缘检测算法。
3.对于每个边缘点,我们可以通过遍历参数空间来找到其可能构成的直线。
每个直线在参数空间中有唯一的参数表示,包括直线的角度θ和距离ρ。
θ代表线段与水平轴的夹角(在0°到180°之间),ρ表示线段距离原点的距离。
4.对于每个边缘点,计算它对应的所有可能直线的参数,并在参数空间中进行累加。
这样,边缘点对应的直线在参数空间中的累加值越大,说明有越多直线经过该点。
5.当所有边缘点都进行了累加后,我们可以在参数空间中找到累加值最高的点,这个点对应的直线就是图像中的一条直线。
累加值最高的点的参数(θ,ρ)表示了该直线的角度和距离,我们可以根据这些参数在原始图像中绘制出该直线。
哈夫变换的优点是能够检测到图像中的直线或圆的参数,适用于不同形状和大小的边缘检测。
但是,由于参数空间的维度较高,整个参数空间会花费很多计算时间。
为了减少计算量,可以使用一些优化方法,如使用霍夫概率算法(Hough probabilistic algorithm)或霍夫梯度算法(Hough gradient algorithm)。
总之,哈夫变换是一种常用于边缘检测的图像处理算法,通过在参数空间进行投票来确定图像中特定形状的参数。
MATLABCanny边缘检测 我可没直接调⽤系统函数,要是那样就太⽔了。
其实我的matlab代码很容易就能翻译成c/c++的。
canny边缘检测⼀共四个部分: 1.对原图像⾼斯平滑 2.对⾼斯平滑后的图像进⾏sobel边缘检测。
这⾥需要求横的和竖的还有联合的,所以⼀共三个需要sobel边缘检测图像。
3.对联合的sobel检测图像进⾏⾮极⼤抑制 4.连接边缘点并进⾏滞后阈值处理。
下⾯是代码:main.m1 clear all;2 close all;3 clc;45 img=imread('lena.jpg');6 imshow(img);7 [m n]=size(img);8 img=double(img);910 %%canny边缘检测的前两步相对不复杂,所以我就直接调⽤系统函数了11 %%⾼斯滤波12 w=fspecial('gaussian',[55]);13 img=imfilter(img,w,'replicate');14 figure;15 imshow(uint8(img))1617 %%sobel边缘检测18 w=fspecial('sobel');19 img_w=imfilter(img,w,'replicate'); %求横边缘20 w=w';21 img_h=imfilter(img,w,'replicate'); %求竖边缘22 img=sqrt(img_w.^2+img_h.^2); %注意这⾥不是简单的求平均,⽽是平⽅和在开⽅。
我曾经好长⼀段时间都搞错了23 figure;24 imshow(uint8(img))2526 %%下⾯是⾮极⼤抑制27 new_edge=zeros(m,n);28for i=2:m-129for j=2:n-130 Mx=img_w(i,j);31 My=img_h(i,j);3233if My~=034 o=atan(Mx/My); %边缘的法线弧度35 elseif My==0 && Mx>036 o=pi/2;37else38 o=-pi/2;39 end4041 %Mx处⽤My和img进⾏插值42 adds=get_coords(o); %边缘像素法线⼀侧求得的两点坐标,插值需要43 M1=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %插值后得到的像素,⽤此像素和当前像素⽐较44 adds=get_coords(o+pi); %边缘法线另⼀侧求得的两点坐标,插值需要45 M2=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %另⼀侧插值得到的像素,同样和当前像素⽐较4647 isbigger=(Mx*img(i,j)>M1)*(Mx*img(i,j)>=M2)+(Mx*img(i,j)<M1)*(Mx*img(i,j)<=M2); %如果当前点⽐两边点都⼤置1 4849if isbigger50 new_edge(i,j)=img(i,j);51 end52 end53 end54 figure;55 imshow(uint8(new_edge))5657 %%下⾯是滞后阈值处理58 up=120; %上阈值59 low=100; %下阈值60set(0,'RecursionLimit',10000); %设置最⼤递归深度61for i=1:m62for j=1:n63if new_edge(i,j)>up &&new_edge(i,j)~=255 %判断上阈值64 new_edge(i,j)=255;65 new_edge=connect(new_edge,i,j,low);66 end67 end68 end69 figure;70 imshow(new_edge==255)get_coords.m1 function re=get_coords(angle) %angle是边缘法线⾓度,返回法线前后两点2 sigma=0.000000001;3 x1=ceil(cos(angle+pi/8)*sqrt(2)-0.5-sigma);4 y1=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);5 x2=ceil(cos(angle-pi/8)*sqrt(2)-0.5-sigma);6 y2=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);7 re=[x1 y1 x2 y2];89 endconnect.m1 function nedge=connect(nedge,y,x,low) %种⼦定位后的连通分析2 neighbour=[-1 -1;-10;-11;0 -1;01;1 -1;10;11]; %⼋连通搜寻3 [m n]=size(nedge);4for k=1:85 yy=y+neighbour(k,1);6 xx=x+neighbour(k,2);7if yy>=1 &&yy<=m &&xx>=1 && xx<=n8if nedge(yy,xx)>=low && nedge(yy,xx)~=255 %判断下阈值9 nedge(yy,xx)=255;10 nedge=connect(nedge,yy,xx,low);11 end12 end13 end1415 end每步运⾏效果:原图⾼斯模糊后sobel边缘检测后⾮极⼤抑制后上阈值120,下阈值100检测结果。
边缘检测与Hough变换实验目的:写一段代码实现一幅图像,其中分为以下两个步骤1.使用Matlab中的canny算子进行边缘检测,可以让使用者交互式的输入不同的Sigma的值实现边缘检测。
2.运用Hough变换来找到最突出的边缘,在图像中找到并画出最长的直线。
实验原理:canny算子边缘检测的基本原理是:采用二维高斯函数的任一方向上的一阶方向导数为噪声滤波器,通过与图像f(x,y)卷积进行滤波,然后对滤波后的图像寻找图像梯度的局部极大值,以确定图像边缘。
Canny边缘检测算子是一种最优边缘检测算子。
其实现步骤如下:1)用高斯滤波器平滑图像2)计算滤波后图像梯度的幅值和方向3)对梯度幅值应用非极大值抑制,其过程为找出图像梯度中的局部极大值点,把其他非局部极大值置零,以得到细化的边缘;4)再用双阈值算法检测和连接边缘;使用canny算子的edge函数调用格式为BW=edge(I,'canny');BW=edge(I,'canny',thresh,sigma);BW=edge(I,'canny',thresh);[BW,threshold]=edge(I,'canny',…);2.Hough变换时最常用的直线提取方法,它的基本思想是:将直线上每一个数据点变换为参数平面中的一条直线或曲线,利用共线的数据点对应的参数曲线相交于参数空间中一点的关系,使得直线提取问题转化为计数问题。
Hough变换提取直线的主要优点是受直线中的间隙和噪声影响较小。
Hough检测直线的Matlab实现:在Matlab图像处理工具箱中提供了3个与Hough变换有关的函数,分别为hough函数,houghpeaks函数和houghlines函数。
hough函数的调用格式为[H,theta,rho]=hough(BW);其中BW为二值图像,H为Hough变换矩阵,theta为变换轴间隔θ,rho为元素个数。
Houghpeaks函数是用来提取Hough变换后参数平面上的峰值点。
pythonCanny边缘检测算法的实现图像边缘信息主要集中在⾼频段,通常说图像锐化或检测边缘,实质就是⾼频滤波。
我们知道微分运算是求信号的变化率,具有加强⾼频分量的作⽤。
在空域运算中来说,对图像的锐化就是计算微分。
对于数字图像的离散信号,微分运算就变成计算差分或梯度。
图像处理中有多种边缘检测(梯度)算⼦,常⽤的包括普通⼀阶差分,Robert算⼦(交叉差分),Sobel算⼦等等,是基于寻找梯度强度。
拉普拉斯算⼦(⼆阶差分)是基于过零点检测。
通过计算梯度,设置阀值,得到边缘图像。
Canny边缘检测算⼦是⼀种多级检测算法。
1986年由John F. Canny提出,同时提出了边缘检测的三⼤准则:低错误率的边缘检测:检测算法应该精确地找到图像中的尽可能多的边缘,尽可能的减少漏检和误检。
最优定位:检测的边缘点应该精确地定位于边缘的中⼼。
图像中的任意边缘应该只被标记⼀次,同时图像噪声不应产⽣伪边缘。
Canny算法出现以后⼀直是作为⼀种标准的边缘检测算法,此后也出现了各种基于Canny算法的改进算法。
时⾄今⽇,Canny算法及其各种变种依旧是⼀种优秀的边缘检测算法。
⽽且除⾮前提条件很适合,你很难找到⼀种边缘检测算⼦能显著地⽐Canny算⼦做的更好。
关于各种差分算⼦,还有Canny算⼦的简单介绍,这⾥就不罗嗦了,⽹上都可以找得到。
直接进⼊Canny算法的实现。
Canny算法分为以下⼏步。
1. ⾼斯模糊。
这⼀步很简单,类似于LoG算⼦(Laplacian of Gaussian)作⾼斯模糊⼀样,主要作⽤就是去除噪声。
因为噪声也集中于⾼频信号,很容易被识别为伪边缘。
应⽤⾼斯模糊去除噪声,降低伪边缘的识别。
但是由于图像边缘信息也是⾼频信号,⾼斯模糊的半径选择很重要,过⼤的半径很容易让⼀些弱边缘检测不到。
2. 计算梯度幅值和⽅向。
图像的边缘可以指向不同⽅向,因此经典Canny算法⽤了四个梯度算⼦来分别计算⽔平,垂直和对⾓线⽅向的梯度。
4.1 Canny算子检测的程序及仿真图BW = edge(I,'canny');% 以自动阈值选择法对图像进行Canny算子检测[BW,thresh] = edge(I,'canny');% 返回当前Canny算子边缘检测的阈值disp('Canny算子自动选择的阈值为:')disp(thresh)subplot(121),imshow(BW);title('自动阈值的Canny算子边缘检测')BW = edge(I,'Canny',[0.2 0.5]);% 以阈值为[0.1 0.5]对图像进行Canny算子检测subplot(122),imshow(BW);title('阈值为[0.1 0.5]的Canny算子边缘检测')图 1 4.2 Roberts算子检测的程序及仿真图I = imread('rice.tif');BW1 = edge(I,'roberts');% 以自动阈值选择法对图像进行Roberts算子检测[BW1,thresh1] = edge(I,'roberts');% 返回当前Roberts算子边缘检测的阈值disp('Roberts算子自动选择的阈值为:')disp(thresh1)subplot(121),imshow(BW1);title('自动阈值的Roberts算子边缘检测')BW1 = edge(I,'roberts',0.05);% 以阈值为0.05对图像进行Roberts算子检测subplot(122),imshow(BW1);title('阈值为0.05的Roberts算子边缘检测')BW2 = edge(I,'sobel');% 以自动阈值选择法对图像进行Sobel算子检测figure,subplot(131),imshow(BW2);title('自动阈值的Sobel算子边缘检测')[BW2,thresh2] = edge(I,'sobel');% 返回当前Sobel算子边缘检测的阈值disp('Sobel算子自动选择的阈值为:')disp(thresh2)BW2 = edge(I,'sobel',0.05,'horizontal');% 以阈值为0.05水平方向对图像进行Sobel算子检测subplot(132),imshow(BW2);title('阈值0.05水平方向Sobel算子')BW2 = edge(I,'sobel',0.05,'vertical');% 以阈值为0.05垂直方向对图像进行Sobel算子检测subplot(133),imshow(BW2);title('阈值0.05垂直方向Sobel算子')BW3 = edge(I,'prewitt');% 以自动阈值选择法对图像进行Prewitt算子检测figure,subplot(131),imshow(BW3);title('自动阈值的Prewitt算子边缘检测')[BW3,thresh3] = edge(I,'prewitt');% 返回当前Prewitt算子边缘检测的阈值disp('Prewitt算子自动选择的阈值为:')disp(thresh3)BW3 = edge(I,'prewitt',0.05,'horizontal');% 以阈值为0.05水平方向对图像进行Prewitt算子检测subplot(132),imshow(BW3);title('阈值0.05水平方向Prewitt算子')BW3 = edge(I,'prewitt',0.05,'vertical');% 以阈值为0.05垂直方向对图像进行Prewitt算子检测subplot(133),imshow(BW3);title('阈值0.05垂直方向Prewitt算子')图 2图 3图 4 4.3 Log算子检测的程序及仿真图I = imread('rice.tif');BW1 = edge(I,'log');% 以自动阈值选择法对图像进行Log算子检测[BW1,thresh1] = edge(I,'log');% 返回当前Log算子边缘检测的阈值disp('Log算子自动选择的阈值为:')disp(thresh1)subplot(121),imshow(BW1);title('自动阈值的Log算子边缘检测')BW1 = edge(I,'log',0.005);% 以阈值为0.005对图像进行Log算子检测subplot(122),imshow(BW1);title('阈值为0.005的Log算子边缘检测')h=fspecial('gaussian',5);% 设计高斯滤波器[BW2,thresh2] = edge(I,'zerocross',[],h); % 返回当前零交叉检测边缘检测的阈值disp('零交叉检测自动选择的阈值为:')disp(thresh2)figure,subplot(121),imshow(BW2);title('自动阈值的零交叉边缘检测')BW2 = edge(I,'zerocross',0.03,h);% 以阈值为0.03对图像进行零交叉检测subplot(122),imshow(BW2);title('阈值为0.03的零交叉边缘检测')图 5图 65、膨胀与腐蚀的算法概念及程序膨胀(dilation)可以看做是腐蚀的对偶运算,其定义是:把结构元素B平移a 后得到Ba,若Ba击中X,我们记下这个a点。
图像边缘探测--Canny算⼦实现这⼏天挺郁闷的,不知到该做什么,是继续做我的图像融合,还是改⾏做语⾳识别,我也不清楚。
像剑桥、⽜津、MIT、卡耐基-梅隆等⼤学都在搞语⾳识别。
唉,还是好好忙⾃⼰的数学基础和专业课吧,这⼏天作业也相当的多。
我这⼈有⼀点不好,就是看到新的东西都想学看看,但是三分钟热度。
从今天开始,我要进⾏我的长跑计划,我⼀哥们说这活动最能培养⼈的意志⼒了,如果能坚持⼀年的话,那么你的恒⼼就相当厉害了。
下⾯的这个⼩程序使⽤Canny算⼦进⾏边缘探测,如下:#include"cv.h"#include"highgui.h"void main(){//载⼊图像,并将其转化位灰度图像IplImage* srcImage = cvLoadImage("lena.jpg",0);//创建⽬标图像IplImage* dstImage = cvCloneImage(srcImage);//创建窗⼝cvNamedWindow("srcImage",1);cvNamedWindow("dstImage",1);/*------------使⽤canny算⼦探测边缘-----------------// void cvCanny( const CvArr* img, CvArr* edges, // double threshold1,double threshold2, int // apertureSize=3 ); // 阀值1、2⽤于边缘的连接 */cvCanny(srcImage,dstImage,100,200/*,3*/);//显⽰原图像和处理结果cvShowImage("srcImage",srcImage);cvShowImage("dstImage",dstImage);//等待按键cvWaitKey();//释放资源cvDestroyWindow("srcImage");cvDestroyWindow("dstImage");cvReleaseImage(&srcImage);cvReleaseImage(&dstImage);}Ok,效果如下。
Python实现Canny及Hough算法代码实例解析任务说明:编写⼀个钱币定位系统,其不仅能够检测出输⼊图像中各个钱币的边缘,同时,还能给出各个钱币的圆⼼坐标与半径。
效果代码实现Canny边缘检测:# Author: Ji Qiu (BUPT)# filename: my_canny.pyimport cv2import numpy as npclass Canny:def __init__(self, Guassian_kernal_size, img, HT_high_threshold, HT_low_threshold):''':param Guassian_kernal_size: ⾼斯滤波器尺⼨:param img: 输⼊的图⽚,在算法过程中改变:param HT_high_threshold: 滞后阈值法中的⾼阈值:param HT_low_threshold: 滞后阈值法中的低阈值'''self.Guassian_kernal_size = Guassian_kernal_sizeself.img = imgself.y, self.x = img.shape[0:2]self.angle = np.zeros([self.y, self.x])self.img_origin = Noneself.x_kernal = np.array([[-1, 1]])self.y_kernal = np.array([[-1], [1]])self.HT_high_threshold = HT_high_thresholdself.HT_low_threshold = HT_low_thresholddef Get_gradient_img(self):'''计算梯度图和梯度⽅向矩阵。
:return: ⽣成的梯度图'''print ('Get_gradient_img')new_img_x = np.zeros([self.y, self.x], dtype=np.float)new_img_y = np.zeros([self.y, self.x], dtype=np.float)for i in range(0, self.x):for j in range(0, self.y):if j == 0:new_img_y[j][i] = 1else:new_img_y[j][i] = np.sum(np.array([[self.img[j - 1][i]], [self.img[j][i]]]) * self.y_kernal)if i == 0:new_img_x[j][i] = 1else:new_img_x[j][i] = np.sum(np.array([self.img[j][i - 1], self.img[j][i]]) * self.x_kernal)gradient_img, self.angle = cv2.cartToPolar(new_img_x, new_img_y)#返回幅值和相位self.angle = np.tan(self.angle)self.img = gradient_img.astype(np.uint8)return self.imgdef Non_maximum_suppression (self):'''对⽣成的梯度图进⾏⾮极⼤化抑制,将tan值的⼤⼩与正负结合,确定离散中梯度的⽅向。
Canny多级边缘检测算法的C语言实现1 Canny算法的实现流程1.1 图像读取和灰度化编程时采用上文所描述的第二种方法来实现图像的灰度化。
其中ptr数组中保存的灰度化后的图像数据。
具体的灰度化后的效果如图3所示。
[cpp] view plaincopyprint?1.IplImage* ColorImage = cvLoadImage( "12.jpg", -1 ); //读入图像,获取彩图指针2.IplImage* OpenCvGrayImage; //定义变换后的灰度图指针3.unsigned char* ptr; //指向图像的数据首地址4.if (ColorImage == NULL)5. return;6.int i = ColorImage->width * ColorImage->height;7.BYTE data1; //中间过程变量8.BYTE data2;9.BYTE data3;10.ptr = new unsigned char[i];11.for(intj=0; j<ColorImage->height; j++) //对RGB加权平均,权值参考OpenCV12.{13. for(intx=0; x<ColorImage->width; x++)14. {15. data1 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3]; //B分量16. data2 =(BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 1]; //G分量17. data3 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 2]; //R分量18. ptr[j*ColorImage->width+x]=(BYTE)(0.072169*data1 + 0.715160*data2 + 0.212671*data3);19. }20.}21.OpenCvGrayImage=cvCreateImageHeader(cvGetSize(Col orImage), ColorImage->depth, 1);22.cvSetData(GrayImage,ptr, GrayImage->widthStep); //根据数据生成灰度图23.cvNamedWindow("GrayImage",CV_WINDOW_AUTOSIZE);24.cvShowImage("GrayImage",OpenCvGrayImage); //显示灰度图25.cvWaitKey(0);26.cvDestroyWindow("GrayImage");1.2 图像的高斯滤波根据上面所讲的边缘检测过程,下一个步骤就是对图像进行高斯滤波。
哈夫变换和Canny边缘检测算法摘要在图象边缘检测中往往要求所检测到的边缘具有封闭特性,本文详细地分析了目前常用的两种算法:哈夫变换和Canny边缘检测算法,最后,探讨边缘算子应满足的准则。
关键词边缘检测;闭合性;哈夫变换;Canny算子1引言图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。
图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。
在我们常用的几种用于边缘检测的算子中Laplace算子常常会产生双边界;而其他一些算子如Sobel算子又往往会形成不闭合区域。
本文主要讨论了在边缘检测中,获取封闭边界区域的算法。
2 图象边缘检测的基本步骤(1)滤波。
边缘检测主要基于导数计算,但受噪声影响。
但滤波器在降低噪声的同时也导致边缘强度的损失。
(2)增强。
增强算法将邻域中灰度有显著变化的点突出显示。
一般通过计算梯度幅值完成。
(3)检测。
但在有些图象中梯度幅值较大的并不是边缘点。
最简单的边缘检测是梯度幅值阈值判定。
(4)定位。
精确确定边缘的位置。
图1 边缘检测酸法的基本步骤3 边界闭合的算法3.1 哈夫变换[3]由于噪声的存在,用各种算子得到的边缘象素不连续,但是由于边缘象素之间有一定的连续性,我们就可以根据边缘象素在梯度幅度或梯度方向上的连续性把他们连接起来。
具体说来,如果象素(s,t)在象素(x,y)的领域且它们的梯度幅度与梯度方向在给定的阈值下满足:T是幅度阈值;A是角度阈值;那么,如对所有的边缘象素都进行上述的判断和连接就可以得到一个闭合的边界。
哈夫变换方法是利用图像得全局特性而对目标轮廓进行直接检测的方法,在已知区域形状的条件下,哈夫变换可以准确地捕获到目标的边界(连续的获不连续的),并最终以连续曲线的形式输出变换结果,该变换可以从强噪声环境中将已知形状的目标准确得分割提取出来。
哈夫变换的核心思想是: 点—线的对偶性(duality)。
通过变换将图象从图像控件转换到参数空间,在图像空间中一条过点(x,y)的直线方程为y=px+q,通过代数变换可以转换为另一种形式p=-px+y,即参数空间中过点(p,q)的一条直线,如果在图像空间中保持直线的斜率和截距的不变,其在参数空间必定过点(p,q),这也就说明,在图像空间中共线的点对应参数空间共点的线. 哈夫变换就是根据上述点—线的对偶性把在图象空间中存在的直线检测问题转换为参数空间中存在的点检测问题,后者的处理要比前者简单易行得多,只需简单地累加统计即可实现对边缘的检测.哈夫变换不仅能检测直线等一阶曲线的目标,对于园、椭圆等高阶的曲线都可以检测出来。
如圆的方程为:其参数空间是一个3D空间A(a,b,r),原理与检测直线上的点相同,只是复杂性增加了。
如果圆的半径r己知,则问题又回到了2D空间A(a,b)哈夫变换对已知目标的检测过程受随机噪声和曲线中断等不利因素的影响很小,而且分割出的目标是直接放到另一个“干净”的缓存中的,因此可以做到零噪声,是相当有优势的。
常规的哈夫变换在理论上能对所有可以写出具体解析表达式的曲线进行目标检测,但是在实际处理时,经常待检测的目标不规则或是很难获取甚至根本没有解析式,此时就要采取广义上的哈夫变换来检测目标,3.2最优的阶梯型边缘检测算法(canny边缘检测)1.Canny边缘检测基本原理(1)图象边缘检测必须满足两个条件:一能有效地抑制噪声;二必须尽量精确确定边缘的位置。
(2)根据对信噪比与定位乘积进行测度,得到最优化逼近算子。
这就是Canny边缘检测算子。
(3)类似与Marr(LoG)边缘检测方法,也属于先平滑后求导数的方法。
2.Canny边缘检测算法:step1:用高斯滤波器平滑图象;step2:用一阶偏导的有限差分来计算梯度的幅值和方向;step3:对梯度幅值进行非极大值抑制;step4:用双阈值算法检测和连接边缘。
step1:高斯平滑函数step3:非极大值抑制仅仅得到全局的梯度并不足以确定边缘,因此为确定边缘,必须保留局部梯度最大的点,而抑制非极大值。
(non-maxima suppression,NMS)解决方法:利用梯度的方向。
图2非极大值抑制四个扇区的标号为0到3,对应3*3邻域的四种可能组合。
在每一点上,邻域的中心象素M与沿着梯度线的两个象素相比。
如果M的梯度值不比沿梯度线的两个相邻象素梯度值大,则令M=0。
即:step4:阈值化减少假边缘段数量的典型方法是对N[i,j]使用一个阈值。
将低于阈值的所有值赋零值。
但问题是如何选取阈值?解决方法:双阈值算法。
双阈值算法对非极大值抑制图象作用两个阈值τ1和τ2,且2τ1≈τ2,从而可以得到两个阈值边缘图象N1[i,j]和N2[i,j]。
由于N2[i,j]使用高阈值得到,因而含有很少的假边缘,但有间断(不闭合)。
双阈值法要在N2[i,j]中把边缘连接成轮廓,当到达轮廓的端点时,该算法就在N1[i,j]的8邻点位置寻找可以连接到轮廓上的边缘,这样,算法不断地在N1[i,j]中收集边缘,直到将N2[i,j]连接起来为止。
4 边缘算子应满足的准则若满足此准则,就能保证单边缘只有一个响应。
对一个算法的性能评价可分为两个阶段进行:计算假边缘与丢失边缘的数目;测量用于估计位置和方向的误差(或误差分布)。
边缘检测算法的优劣也可用品质因数( Figure of Merit)来描述。
Pratt品质因数是其中一种,它着重考虑了丢失了有效的边缘、边缘定位误差和将噪声判断为边缘等三种误差。
5 结束语边缘检测在图象分割、模式识别、机器视觉等中都有重要作用,人们已研究出很多种边缘检测算法,而哈夫变换和canny边缘算子等是最经典的算法,人们已在这些经典算法基础上提出一些新的改进算法。
canny算子代码void CreatGauss(double sigma, double **pdKernel, int *pnWidowSize);void GaussianSmooth(SIZE sz, LPBYTE pGray, LPBYTE pResult, double sigma);void Grad(SIZE sz, LPBYTE pGray, int *pGradX, int *pGradY, int *pMag);void NonmaxSuppress(int *pMag, int *pGradX, int *pGradY, SIZE sz, LPBYTE pNSRst); void EstimateThreshold(int *pMag, SIZE sz, int *pThrHigh, int *pThrLow, LPBYTE pGray, double dRatHigh, double dRatLow);void Hysteresis(int *pMag, SIZE sz, double dRatLow, double dRatHigh, LPBYTE pResult); void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz);void Canny(LPBYTE pGray, SIZE sz, double sigma, double dRatLow,double dRatHigh, LPBYTE pResult);#include "afx.h"#include "math.h"#include "canny.h"// 一维高斯分布函数,用于平滑函数中生成的高斯滤波系数void CreatGauss(double sigma, double **pdKernel, int *pnWidowSize){LONG i;//数组中心点int nCenter;//数组中一点到中心点距离double dDis;//中间变量double dValue;double dSum;dSum = 0;// [-3*sigma,3*sigma] 以内数据,会覆盖绝大部分滤波系数*pnWidowSize = 1+ 2*ceil(3*sigma);nCenter = (*pnWidowSize)/2;*pdKernel = new double[*pnWidowSize];//生成高斯数据for(i=0;i<(*pnWidowSize);i++){dDis = double(i - nCenter);dV alue = exp(-(1/2)*dDis*dDis/(sigma*sigma))/(sqrt(2*3.1415926)*sigma);(*pdKernel)[i] = dValue;dSum+=dValue;}//归一化for(i=0;i<(*pnWidowSize);i++){(*pdKernel)[i]/=dSum;}}//用高斯滤波器平滑原图像void GaussianSmooth(SIZE sz, LPBYTE pGray, LPBYTE pResult, double sigma) {LONG x, y;LONG i;//高斯滤波器长度int nWindowSize;//窗口长度int nLen;//一维高斯滤波器double *pdKernel;//高斯系数与图像数据的点乘double dDotMul;//滤波系数总和double dWeightSum;double *pdTemp;pdTemp = new double[sz.cx*sz.cy];//产生一维高斯数据CreatGauss(sigma, &pdKernel, &nWindowSize);nLen = nWindowSize/2;//x方向滤波for(y=0;y<sz.cy;y++){for(x=0;x<sz.cx;x++){dDotMul = 0;dWeightSum = 0;for(i=(-nLen);i<=nLen;i++){//判断是否在图像内部if((i+x)>=0 && (i+x)<sz.cx){dDotMul+=(double)pGray[y*sz.cx+(i+x)] * pdKernel[nLen+i];dWeightSum += pdKernel[nLen+i];}}pdTemp[y*sz.cx+x] = dDotMul/dWeightSum;}}//y方向滤波for(x=0; x<sz.cx;x++){for(y=0; y<sz.cy; y++){dDotMul = 0;dWeightSum = 0;for(i=(-nLen);i<=nLen;i++){if((i+y)>=0 && (i+y)< sz.cy){dDotMul += (double)pdTemp[(y+i)*sz.cx+x]*pdKernel[nLen+i];dWeightSum += pdKernel[nLen+i];}}pResult[y*sz.cx+x] = (unsigned char)dDotMul/dWeightSum;}}delete []pdKernel;pdKernel = NULL;delete []pdTemp;pdTemp = NULL;}// 方向导数,求梯度void Grad(SIZE sz, LPBYTE pGray,int *pGradX, int *pGradY, int *pMag){LONG y,x;//x方向的方向导数for(y=1;y<sz.cy-1;y++){for(x=1;x<sz.cx-1;x++){pGradX[y*sz.cx +x] = (int)( pGray[y*sz.cx+x+1]-pGray[y*sz.cx+ x-1] );}}//y方向方向导数for(x=1;x<sz.cx-1;x++){for(y=1;y<sz.cy-1;y++){pGradY[y*sz.cx +x] = (int)(pGray[(y+1)*sz.cx +x] - pGray[(y-1)*sz.cx +x]);}}//求梯度//中间变量double dSqt1;double dSqt2;for(y=0; y<sz.cy; y++){for(x=0; x<sz.cx; x++){//二阶范数求梯度dSqt1 = pGradX[y*sz.cx + x]*pGradX[y*sz.cx + x];dSqt2 = pGradY[y*sz.cx + x]*pGradY[y*sz.cx + x];pMag[y*sz.cx+x] = (int)(sqrt(dSqt1+dSqt2)+0.5);}}}//非最大抑制void NonmaxSuppress(int *pMag, int *pGradX, int *pGradY, SIZE sz, LPBYTE pNSRst) {LONG y,x;int nPos;//梯度分量int gx;int gy;//中间变量int g1,g2,g3,g4;double weight;double dTmp,dTmp1,dTmp2;//设置图像边缘为不可能的分界点for(x=0;x<sz.cx;x++){pNSRst[x] = 0;pNSRst[(sz.cy-1)*sz.cx+x] = 0;}for(y=0;y<sz.cy;y++){pNSRst[y*sz.cx] = 0;pNSRst[y*sz.cx + sz.cx-1] = 0;}for(y=1;y<sz.cy-1;y++){for(x=1;x<sz.cx-1;x++){//当前点nPos = y*sz.cx + x;//如果当前像素梯度幅度为0,则不是边界点if(pMag[nPos] == 0){pNSRst[nPos] = 0;}else{//当前点的梯度幅度dTmp = pMag[nPos];//x,y方向导数gx = pGradX[nPos];gy = pGradY[nPos];//如果方向导数y分量比x分量大,说明导数方向趋向于y分量if(abs(gy) > abs(gx)){//计算插值比例weight = fabs(gx)/fabs(gy);g2 = pMag[nPos-sz.cx];g4 = pMag[nPos+sz.cx];//如果x,y两个方向导数的符号相同//C 为当前像素,与g1-g4 的位置关系为://g1 g2// C// g4 g3if(gx*gy>0){g1 = pMag[nPos-sz.cx-1];g3 = pMag[nPos+sz.cx+1];}//如果x,y两个方向的方向导数方向相反//C是当前像素,与g1-g4的关系为:// g2 g1// C// g3 g4else{g1 = pMag[nPos-sz.cx+1];g3 = pMag[nPos+sz.cx-1];}}//如果方向导数x分量比y分量大,说明导数的方向趋向于x分量else{//插值比例weight = fabs(gy)/fabs(gx);g2 = pMag[nPos+1];g4 = pMag[nPos-1];//如果x,y两个方向的方向导数符号相同//当前像素C与g1-g4的关系为// g3// g4 C g2// g1if(gx * gy > 0){g1 = pMag[nPos+sz.cx+1];g3 = pMag[nPos-sz.cx-1];}//如果x,y两个方向导数的方向相反// C与g1-g4的关系为// g1// g4 C g2// g3else{g1 = pMag[nPos-sz.cx+1];g3 = pMag[nPos+sz.cx-1];}}//利用g1-g4 对梯度进行插值{dTmp1 = weight*g1 + (1-weight)*g2;dTmp2 = weight*g3 + (1-weight)*g4;//当前像素的梯度是局部的最大值//该点可能是边界点if(dTmp>=dTmp1 && dTmp>=dTmp2){pNSRst[nPos] = 128;}else{//不可能是边界点pNSRst[nPos] = 0;}}}}}}// 统计pMag的直方图,判定阈值void EstimateThreshold(int *pMag, SIZE sz, int *pThrHigh, int *pThrLow, LPBYTE pGray,double dRatHigh, double dRatLow){LONG y,x,k;//该数组的大小和梯度值的范围有关,如果采用本程序的算法//那么梯度的范围不会超过pow(2,10)int nHist[256];//可能边界数int nEdgeNum;//最大梯度数int nMaxMag;int nHighCount;nMaxMag = 0;//初始化for(k=0;k<256;k++){nHist[k] = 0;}//统计直方图,利用直方图计算阈值for(y=0;y<sz.cy;y++){for(x=0;x<sz.cx;x++){if(pGray[y*sz.cx+x]==128){nHist[pMag[y*sz.cx+x]]++;}}}nEdgeNum = nHist[0];nMaxMag = 0;//统计经过“非最大值抑制”后有多少像素for(k=1;k<256;k++){if(nHist[k] != 0){nMaxMag = k;}//梯度为0的点是不可能为边界点的//经过non-maximum suppression后有多少像素nEdgeNum += nHist[k];}//梯度比高阈值*pThrHigh 小的像素点总书目nHighCount = (int)(dRatHigh * nEdgeNum + 0.5);k=1;nEdgeNum = nHist[1];//计算高阈值while((k<(nMaxMag-1)) && (nEdgeNum < nHighCount)){k++;nEdgeNum += nHist[k];}*pThrHigh = k;//低阈值*pThrLow = (int)((*pThrHigh) * dRatLow + 0.5);}//利用函数寻找边界起点void Hysteresis(int *pMag, SIZE sz, double dRatLow, double dRatHigh, LPBYTE pResult) {LONG y,x;int nThrHigh,nThrLow;int nPos;//估计TraceEdge 函数需要的低阈值,以及Hysteresis函数使用的高阈值EstimateThreshold(pMag, sz,&nThrHigh,&nThrLow,pResult,dRatHigh,dRatLow);//寻找大于dThrHigh的点,这些点用来当作边界点,//然后用TraceEdge函数跟踪该点对应的边界for(y=0;y<sz.cy;y++){for(x=0;x<sz.cx;x++){nPos = y*sz.cx + x;//如果该像素是可能的边界点,并且梯度大于高阈值,//该像素作为一个边界的起点if((pResult[nPos]==128) && (pMag[nPos] >= nThrHigh)){//设置该点为边界点pResult[nPos] = 255;TraceEdge(y,x,nThrLow,pResult,pMag,sz);}}}//其他点已经不可能为边界点for(y=0;y<sz.cy;y++){for(x=0;x<sz.cx;x++){nPos = y*sz.cx + x;if(pResult[nPos] != 255){pResult[nPos] = 0;}}}}//根据Hysteresis 执行的结果,从一个像素点开始搜索,搜索以该像素点为边界起点的一条边界的//一条边界的所有边界点,函数采用了递归算法// 从(x,y)坐标出发,进行边界点的跟踪,跟踪只考虑pResult中没有处理并且可能是边界// 点的像素(=128),像素值为0表明该点不可能是边界点,像素值为255表明该点已经是边界点void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz){//对8邻域像素进行查询int xNum[8] = {1,1,0,-1,-1,-1,0,1};int yNum[8] = {0,1,1,1,0,-1,-1,-1};LONG yy,xx,k;for(k=0;k<8;k++){yy = y+yNum[k];xx = x+xNum[k];if(pResult[yy*sz.cx+xx]==128 && pMag[yy*sz.cx+xx]>=nThrLow ){//该点设为边界点pResult[yy*sz.cx+xx] = 255;//以该点为中心再进行跟踪TraceEdge(yy,xx,nThrLow,pResult,pMag,sz);}}}// Canny算子void Canny(LPBYTE pGray, SIZE sz, double sigma, double dRatLow,double dRatHigh, LPBYTE pResult){//经过高斯滤波后的图像LPBYTE pGaussSmooth;pGaussSmooth = new unsigned char[sz.cx*sz.cy];//x方向导数的指针int *pGradX;pGradX = new int[sz.cx*sz.cy];//y方向int *pGradY;pGradY = new int[sz.cx*sz.cy];//梯度的幅度int *pGradMag;pGradMag = new int[sz.cx*sz.cy];//对原图高斯滤波GaussianSmooth(sz,pGray,pGaussSmooth,sigma);//计算方向导数和梯度的幅度Grad(sz,pGaussSmooth,pGradX,pGradY,pGradMag);//应用非最大抑制NonmaxSuppress(pGradMag,pGradX,pGradY,sz,pResult); //应用Hysteresis,找到所有边界Hysteresis(pGradMag,sz,dRatLow,dRatHigh,pResult); delete[] pGradX;pGradX = NULL;delete[] pGradY;pGradY = NULL;delete[] pGradMag;pGradMag = NULL;delete[] pGaussSmooth;pGaussSmooth = NULL;}/*void CChildWnd::OnCanny(){if (! m_fOpenFile){return;}m_fDone = TRUE;RGBToGray(szImg, aRGB, aGray, BPP);Canny(aGray,szImg,0.1,0.9,0.76,aBinImg);ShowGrayImage("l",szImg,aBinImg);}//*/。