车辆动力学模型 python
- 格式:doc
- 大小:11.68 KB
- 文档页数:4
Apollo 控制算法中使用的车辆动力学模型的推导过程动力学主要研究作用于物体的力与物体运动的关系。
车辆动力学模型一般用于分析车辆的平顺性和车辆操纵的稳定性。
对于车来说,研究车辆动力学,主要是研究车辆轮胎及其相关部件的受力情况。
比如纵向速度控制,通过控制轮胎转速实现;
横向航向控制,通过控制轮胎转角实现。
正常情况下,车辆上的作用力沿着三个不同的轴分布:
纵轴上的力包括驱动力和制动力,以及滚动阻力和拖拽阻力作滚摆运动;。
车辆的运动学模型和动⼒学模型系统建模是系统控制的前提和基础,对于⽆⼈车的横向控制(控制车辆转向,使其沿期望路径⾏驶),通过对车辆模型进⾏合理的简化和解耦,建⽴合适的车辆模型,对实现⽆⼈车的路径跟踪⾄关重要。
所谓车辆模型,即描述车辆运动状态的模型,⼀般可分为两类:运动学车辆模型;动⼒学车辆模型。
研究表明,在低速时,车辆的运动学特性较为突出;⽽在⾼速时,车辆的动⼒学特性对⾃⾝的运动状态影响较⼤。
1、运动学车辆模型车辆运动学模型如下图所⽰。
车辆运动学模型这⾥假定车辆是⼀个刚体,根据上图所⽰的⼏何关系,可以得到下⾯的车辆运动学数学模型。
运动学模型的数学公式其中,x0 和 y0 表⽰车辆质⼼的位置,v 为质⼼的纵向速度,r 为车辆的横摆⾓速度,Ψ为车辆的航向⾓,β为车辆的质⼼侧偏⾓。
在低速情况下,车辆在垂直⽅向的运动通常可以忽略,也即车辆的质⼼侧偏⾓为零,车辆的结构就像⾃⾏车⼀样,因此上述模型可以简化⼀个⾃⾏车模型,如下图所⽰:⾃⾏车模型整个模型的控制量可以简化为 v 和δ,即纵向车速和前轮偏⾓。
通常车辆的转向控制量为⽅向盘⾓度,因此需要根据转向传动⽐,将前轮偏⾓转化为⽅向盘⾓度。
上述的⾃⾏车车辆模型适⽤范围⾮常⼴,可以解决⼤部分问题。
但当车辆⾼速⾏驶时,使⽤简单的⼆⾃由度车辆模型通常⽆法满⾜横向控制的精确性和稳定性,这时就需要⽤到车辆的动⼒学模型。
2、动⼒学车辆模型汽车实际的动⼒学特性⾮常复杂,为精确描述车辆的运⾏状态,相关研究学者提出了多种多⾃由度的动⼒学模型。
不过,复杂的车辆动⼒学模型虽然较好的反映车辆的实际运动状态,但并不适⽤于⽆⼈车的横向控制。
其中,单轨模型是⼀个应⽤⽐较多的动⼒学车辆模型。
单轨模型是在忽略了空⽓动⼒学、车辆悬架系统、转向系统等的基础上,将前后轮分别⽤⼀个等效的前轮和后轮来代替,从⽽得到的车辆模型。
单轨模型的具体受⼒分析如下图所⽰。
单轨模型上图中的车⾝坐标系oxy,是以车辆质⼼为坐标原点,以沿车⾝向前的⽅向为x的正⽅向,以垂直于横轴的向左的⽅向为y的正⽅向。
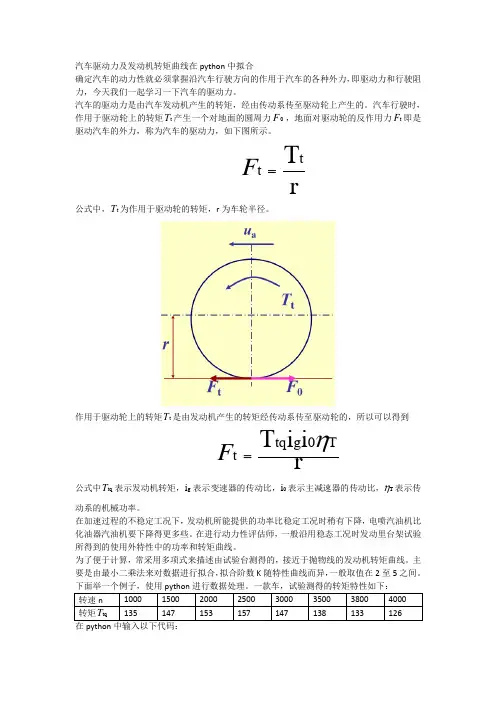
汽车驱动力及发动机转矩曲线在python 中拟合确定汽车的动力性就必须掌握沿汽车行驶方向的作用于汽车的各种外力,即驱动力和行驶阻力,今天我们一起学习一下汽车的驱动力。
汽车的驱动力是由汽车发动机产生的转矩,经由传动系传至驱动轮上产生的。
汽车行驶时,作用于驱动轮上的转矩t T 产生一个对地面的圆周力0F ,地面对驱动轮的反作用力t F 即是驱动汽车的外力,称为汽车的驱动力,如下图所示。
rT t t =F公式中,t T 为作用于驱动轮的转矩,r 为车轮半径。
作用于驱动轮上的转矩t T 是由发动机产生的转矩经传动系传至驱动轮的,所以可以得到r i i T T 0g tq t η=F公式中tq T 表示发动机转矩,g i 表示变速器的传动比,0i 表示主减速器的传动比,T η表示传动系的机械功率。
在加速过程的不稳定工况下,发动机所能提供的功率比稳定工况时稍有下降,电喷汽油机比化油器汽油机要下降得更多些。
在进行动力性评估师,一般沿用稳态工况时发动里台架试验所得到的使用外特性中的功率和转矩曲线。
为了便于计算,常采用多项式来描述由试验台测得的,接近于抛物线的发动机转矩曲线。
主要是由最小二乘法来对数据进行拟合,拟合阶数K 随特性曲线而异,一般取值在2至5之间。
下面举一个例子,使用python 进行数据处理。
一款车,试验测得的转矩特性如下: 转速n1000 1500 2000 2500 3000 3500 3800 4000 转矩tq T 135 147 153 157 147 138 133 126 在python 中输入以下代码:import numpy as npimport matplotlib.pyplot as pltnum1= [1000,1500,2000,2500,3000,3500,3800,4000]x = np.array(num1)print('x is :\n',x)num2 = [135,147,153,157,147,138,134,126]y = np.array(num2)print('y is :\n',y)f1 = np.polyfit(x, y, 5)print('f1 is :\n',f1)p1=np.poly1d(f1)print("p1 is :\n",p1)xnew=np.arange(1000,4000,1)ynew=p1(xnew)plot1=plt.plot(x,y,'r*',label='original values')plot2=plt.plot(xnew,ynew,'b',label='polyfit values') plt.xlabel('n')plt.ylabel('Ttq')plt.title('engeneer')plt.legend()plt.show()按F5运行后即可得到以下输出:输出结果就包括了发动机转矩曲线拟合图像及拟合多项式的系数值。
车辆动力学模型推导概述及解释说明1. 引言1.1 概述本文旨在介绍车辆动力学模型推导的相关内容。
车辆动力学模型是研究汽车运动时所遵循的物理规律的数学表达式,通过建立和分析这些模型,可以深入了解车辆运动过程中涉及的各种参数和因素,并且为设计、控制和优化车辆性能提供有效依据。
1.2 文章结构本文共包括五个部分。
引言部分对文章进行概述,并介绍各部分内容安排。
第二部分将探讨车辆动力学模型推导的理论基础、参数定义以及模型假设。
第三部分将详细描述动力学模型的数学建立与推导过程,包括前提假设与约束条件说明、基本方程推导过程以及对动力学模型的解释与说明。
第四部分将通过实例分析介绍具体应用场景,并进行可行性分析和结果对比评估。
最后一部分是结论与展望,总结研究内容重点,展望未来研究方向以及对成果应用前景进行分析。
1.3 目的目前,随着社会科技的不断发展和人们对汽车性能的不断追求,对于车辆动力学模型推导的需求日益增加。
本文的目的是系统地介绍车辆动力学模型推导的相关理论和方法,以帮助读者更好地理解和应用这些模型。
此外,通过实例分析与应用场景探讨,也旨在展示动力学模型在实际问题中的应用价值,并提供未来研究方向和成果应用前景的思考。
2. 车辆动力学模型推导:2.1 理论基础:车辆动力学是研究车辆在不同路况条件下的运动规律的一门学科。
它主要涉及到车辆的加速度、速度和位移等运动参数。
在车辆动力学模型推导中,我们需要建立一组数学方程来描述车辆运动的规律性和物理特性。
2.2 动力学参数定义:在推导车辆动力学模型之前,首先需要定义一些重要的参数。
这些参数包括车辆质量、惯性矩阵、轮胎摩擦系数以及驱动力等。
这些参数对于建立准确的车辆动力学模型非常重要,并且可以通过实验或者工程估算得到。
2.3 模型假设:在推导车辆动力学模型时,通常会做出一定的假设,以简化问题并减少计算复杂度。
例如,我们可能会假设车辆是刚体、忽略空气阻力、平均考虑轮胎与地面之间的接触等。
阿克曼小车运动学模型 python近年来,随着自动驾驶技术的发展和智能车辆的不断涌现,对于车辆运动学模型的研究变得越来越重要。
而阿克曼小车运动学模型作为其中一个重要的研究方向,也吸引了众多研究者和开发者的关注。
在本文中,我们将一起探讨阿克曼小车运动学模型,并结合Python语言进行深入的分析和实现。
1. 阿克曼小车运动学模型概述让我们来了解一下阿克曼小车的运动学模型。
阿克曼转向原理是指车辆在行驶过程中,由于车辆前后轮的转向速度不同,从而能够实现车辆的曲线行驶。
这种转向方式通常被应用于需要较小转弯半径的车辆,比如城市公交车、货车等。
阿克曼小车运动学模型可以描述车辆的运动轨迹和转向角度,对于车辆路径规划和控制具有重要意义。
2. 阿克曼小车运动学模型的数学原理理解阿克曼小车的运动学模型需要涉及到一些数学原理。
具体来说,要考虑车辆的底盘结构、车轮转向角度、转向半径等因素。
阿克曼小车的转向角度和车身的运动方向之间存在一定的关系,而这一关系可以通过数学模型进行描述。
在实际应用中,我们需要根据阿克曼小车的实际参数和转向要求来计算车辆的运动轨迹,以便进行路径规划或控制算法的设计。
3. Python实现阿克曼小车运动学模型接下来,让我们利用Python语言来实现阿克曼小车的运动学模型。
Python作为一种高效、灵活的编程语言,在车辆运动学模型的实现中具有很大的优势。
我们可以利用Python的数学计算库和可视化工具,来快速地建立阿克曼小车的数学模型,并进行模拟和分析。
通过编写相应的代码,我们可以在Python环境下对阿克曼小车的运动进行可视化展示,以及进行路径规划和控制算法的验证。
4. 总结与展望阿克曼小车运动学模型是车辆运动学研究中的重要内容之一。
通过深入理解阿克曼转向原理和数学模型,以及利用Python语言进行实现,我们可以更好地掌握车辆的运动规律,为自动驾驶技术和智能车辆的发展提供有力的支持。
未来,随着科学技术的不断进步,阿克曼小车运动学模型的研究和应用将会得到进一步拓展,为智能交通和智能车辆的发展开辟新的可能性。

汽车整车动力学仿真分析
汽车整车动力学仿真分析的关键是建立一个准确的动力学模型,该模
型包括车辆的运动学和动力学方程。
运动学方程描述了车辆在不同路面条
件下的运动轨迹和姿态,而动力学方程则描述了车辆在不同工况下的运动
力学性能。
这些方程可以通过物理实验和测试获得,也可以通过先进的计
算力学方法进行数值求解。
在进行汽车整车动力学仿真分析时,首先需要输入一些基本的参数和
假设条件,例如车辆的质量、车辆的几何尺寸、轮胎的摩擦系数等。
然后,根据这些参数和假设条件,可以求解车辆的运动学和动力学方程,以得到
车辆在不同工况下的运动性能。
例如,可以计算车辆的加速度、制动距离、最大行驶速度等指标。
在汽车整车动力学仿真分析中,还可以对不同的设计方案进行比较和
评估。
例如,可以比较不同车辆配置下的加速性能,或者评估不同悬挂系
统对车辆操控性能的影响。
通过这种比较和评估,可以帮助工程师选择最
佳的设计方案,并进行必要的优化。
此外,汽车整车动力学仿真分析还可以用于进行车辆的故障诊断和故
障排除。
通过对车辆在不同工况下的仿真分析,可以定位和解决一些潜在
的动力学问题,以提高车辆的安全性和可靠性。
总之,汽车整车动力学仿真分析是一种非常有效的工具,可以帮助工
程师在汽车设计过程中预测和优化车辆的运动性能、稳定性和操控性能。
它可以帮助工程师选择最佳的设计方案,并进行必要的优化,从而提高车
辆的性能和安全性。
三自由度车辆动力学模型英文Three-Degree-of-Freedom Vehicle Dynamics Model.Vehicle dynamics is a crucial aspect of automotive engineering, dealing with the motion of vehicles under the influence of various forces and moments. Among various dynamic models, the three-degree-of-freedom (3DOF) vehicle dynamics model stands out as a simplified yet effective representation for analyzing vehicle handling characteristics. This model captures the essential dynamics of a vehicle by considering the motion in the lateral, longitudinal, and yaw directions.Lateral Motion:The lateral motion of a vehicle refers to its movement perpendicular to the direction of travel. This motion is primarily influenced by factors such as tire-road interaction forces, steering inputs, and vehicle sidewinds. In the 3DOF model, the lateral motion is described by alateral displacement variable, which represents the deviation of the vehicle from its straight-ahead path.Longitudinal Motion:The longitudinal motion of a vehicle corresponds to its movement along the direction of travel. This motion is primarily influenced by factors such as engine torque, braking forces, and rolling resistance. In the 3DOF model, the longitudinal motion is described by a longitudinal velocity variable, which represents the speed of the vehicle along its path.Yaw Motion:Yaw motion refers to the rotation of a vehicle around its vertical axis, which passes through the vehicle's center of gravity. This motion is influenced by moments generated by tire forces and steering inputs. In the 3DOF model, yaw motion is described by a yaw rate variable, which represents the rate of rotation of the vehicle around its vertical axis.Model Equations:The 3DOF vehicle dynamics model is described by a set of ordinary differential equations. These equations represent the laws of motion in the lateral, longitudinal, and yaw directions. The equations are typically derived using Newton's laws of motion and principles of moment balance.The lateral motion equation takes into account tire forces, steering inputs, and sidewinds. The longitudinal motion equation considers factors like engine torque, braking forces, and rolling resistance. The yaw motion equation incorporates tire forces and steering moments to describe the vehicle's rotational dynamics.Applications:The 3DOF vehicle dynamics model finds applications in various areas of automotive engineering, including vehicle handling analysis, suspension design, and control systemdevelopment. It can be used to simulate vehicle responses to different driving scenarios, such as cornering, braking, and acceleration.By analyzing the model's responses, engineers can assess vehicle handling characteristics, identify potential issues, and optimize vehicle design. Additionally, the model can be extended to include more complex dynamic effects, such as tire roll dynamics and vehicle rollover stability, to further enhance its predictive capabilities.Conclusion:The three-degree-of-freedom vehicle dynamics model is a valuable tool for analyzing vehicle handlingcharacteristics and understanding the dynamics of a vehicle under various driving conditions. Its simplicity and effectiveness make it a popular choice for automotive engineering applications, ranging from vehicle design and optimization to control system development. By leveraging this model, engineers can gain insights into vehicledynamics, improve vehicle performance, and enhance overall safety.。
汽车2自由度和7自由度动力学建模仿真1 路面模型的建立在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励,)(2)(2)(000t w U G t x f t x g g ππ+-=?其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w 为均值为零的随机输入单位白噪声。
上式表明,路面位移可以表示为一随机滤波白噪声信号。
这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD )曲线的形状。
我们可以将路面输入以状态方程的形式加到模型中:=+=?XC Y WF X A X road road road road road 1,2,2,000==-==road road road g road C UG B f A x X ππ;D=0;考虑路面为普通路面,路面不平系数G 0=5e-6m 3/cycle ;车速U 0=20m/s ;建模中,路面随机白噪声可以用随机数产生(Random Number )或者有限带宽白噪声(Band-Limited White Noise )来生成。
本文运用带宽白噪声生成,运用MATLAB/simulink 建立仿真模型如下:图1 路面模型2 汽车2自由度系统建模图2 汽车2自由度系统模型根据图2所示,汽车2自由度系统模型,首先建立运动微分方程:()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----=--+-+-??整理得:+--+-+-+-=-+-+-+-=gw t b w t s b w s b w s b w s w b bs b b s w b s b s bx m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x式中:s C 为悬架阻尼,s K 为悬架刚度,t K 为轮胎刚度,b m 为车身质量,w m 为车轮质量,b b b x x x 、、分别为车身位移、速度、加速度,w w w x x x 、、分别为车轮位移、速度、加速度,g x 为路面输入。
非线性二自由度整车模型仿真分析一、整车模型建立推导二自由度整车模型,并加入魔术公式计算轮胎侧向力,在Simulink中建立非线性二自由度整车模型,设定方向盘角阶跃和方向盘正弦波两种工况,输出整车仿真结果。
建立的模型如下:1)方向盘角阶跃工况整车Simulink模型为:erziyoudu_step.mdl和erziyoudu_step_ay.mdl2)方向盘正弦波工况整车Simulink模型为:erziyoudu_sine.mdl和erziyoudu_sine_ay.mdl3)整车Matlab Function文件:zhengche.m4)轮胎Matlab Function文件:MFtire.m5)轮胎模型仿真为:MF_waiyan.m1、二自由度整车模型:β=−r+2F Yfmvcos(β−δ)+2F Yrmvcosβṙ=2l fI zzF Yf−2l rI zzF Yf2、Simulink整车模型:图1 Simulink整车模型3、轮胎模型:轮胎模型采用ADAMS中的PAC2002轮胎模型pac2002_195_65R15.tir中的侧向力参数。
整车前后轮的侧向力随侧偏角变化曲线如图所示。
图2 前轮的侧向力随侧偏角变化曲线图3 后轮的侧向力随侧偏角变化曲线二、整车操稳仿真1、方向盘角阶跃输入(1)工况设定:车速:60km/h,方向盘角阶跃角度为17.2度,仿真时间为5秒。
(2)仿真结果:图4 质心侧偏角随时间变化曲线图5 质心横摆角速度随时间变化曲线图6 前轴单个车轮侧向力随时间变化曲线图7 后轴单个车轮侧向力随时间变化曲线图8 质心侧向加速度随时间变化曲线2、方向盘角度正弦波输入(1)工况设定:车速:60km/h,方向盘角度正弦波输入振幅为17.2度,周期为6.2832秒,仿真时间为25秒。
(2)仿真结果:图9 方向盘转角随时间变化曲线图10 质心侧偏角随时间变化曲线图11 质心横摆角速度随时间变化曲线图12 前轴单个车轮侧向力随时间变化曲线图13 后轴单个车轮侧向力随时间变化曲线图14 质心侧向加速度随时间变化曲线。
自动驾驶技术实践:使用编程语言构建智能驾驶系统自动驾驶技术是近年来备受关注的热门话题,随着人工智能和机器学习的快速发展,越来越多的汽车制造商和科技公司开始积极投入到自动驾驶技术的研发和实践中。
在这个领域,编程语言发挥着非常重要的作用,它们为智能驾驶系统的构建提供了基础支持。
本文将从编程语言在自动驾驶技术中的应用、智能驾驶系统的构建及相关算法、模型和技术等方面展开讨论,以期能够对读者有所启发和帮助。
一、编程语言在自动驾驶技术中的应用1. C++语言C++语言是一种非常流行且功能丰富的编程语言,它被广泛应用于自动驾驶技术中。
C++语言具有高性能和灵活性的特点,能够轻松应对复杂的自动驾驶系统需求。
例如,C++语言可以用于编写实时控制系统、感知系统、决策系统等子系统的核心代码。
此外,C++语言还可以与硬件进行良好的结合,使得自动驾驶系统能够更好地与传感器、执行器等设备进行交互和通信。
2. Python语言Python语言是一种简单易学且功能强大的脚本语言,它在自动驾驶技术中也有着广泛的应用。
Python语言适合于快速原型设计和开发,可以用于构建自动驾驶系统的高层决策和规划模块。
同时,Python语言还可以用于数据处理和分析,为自动驾驶系统提供丰富的感知信息和场景理解能力。
此外,由于Python语言的生态系统非常丰富,因此开发者可以便利地利用众多第三方库和模块,加速自动驾驶系统的研发和应用。
3. Matlab语言Matlab语言是一种专业的科学计算语言,它在自动驾驶技术中也扮演着重要的角色。
由于自动驾驶技术涉及大量的算法和模型,因此需要进行大量的数学建模和仿真工作。
Matlab语言具有丰富的数学、信号处理和控制工具箱,能够满足自动驾驶系统对于高精度算法和模型的需求。
同时,Matlab语言还具有强大的可视化功能,能够帮助开发者直观地理解和分析自动驾驶系统的工作原理和性能。
二、智能驾驶系统的构建在自动驾驶技术中,智能驾驶系统是整个系统的核心和关键部分。
unicycle动力学模型python实现-概述说明以及解释1.引言1.1 概述Unicycle动力学模型是描述单轮车辆运动规律的数学模型,通过对车辆运动状态的建模和分析,可以更好地理解车辆的运动特性和控制方法。
Python作为一种功能强大的编程语言,可以便捷地实现复杂的数学模型,因此本文将使用Python来实现Unicycle动力学模型。
本文将首先介绍Unicycle动力学模型的基本原理和数学表达,并结合具体案例演示模型的应用。
随后,将详细介绍如何使用Python来实现Unicycle动力学模型,并通过实例演示代码的编写和运行过程。
最后,我们将对Python实现Unicycle动力学模型的优势和局限性进行讨论,并展望未来在这一领域的发展方向。
通过本文的学习,读者可以更深入地理解Unicycle动力学模型的重要性和应用价值,同时也能够掌握如何使用Python来实现和应用这一模型,为进一步深入研究和应用提供了基础和参考。
1.2 文章结构本文主要分为引言、正文和结论三个部分。
在引言部分,将对Unicycle 动力学模型的概要进行介绍,同时说明文章的结构和目的。
正文部分包括Unicycle动力学模型的介绍、Python实现Unicycle动力学模型以及模型的应用与示例。
在结论部分,将总结Unicycle动力学模型的重要性,探讨Python实现的优势与局限性,并展望未来研究方向。
整个文章将以系统性和逻辑性为基础,全面而详细地介绍Unicycle动力学模型及其Python实现的相关内容,以期为读者提供清晰的指导和参考。
1.3 目的本文的目的在于介绍和讨论Unicycle动力学模型的理论基础和实际应用,并使用Python语言实现该模型。
通过深入探讨Unicycle动力学模型的原理和特点,读者可以更全面地了解单轮车辆在运动过程中的动力学表现。
通过Python编程实现该模型,读者可以通过实际代码示例来加深对模型的理解,并学习如何利用Python语言进行动力学模拟和控制算法的开发。
c++代码实现的多自由度车辆动力学模型《C++代码实现的多自由度车辆动力学模型》1. 引言在现代社会中,车辆作为交通工具的重要角色,其运动学和动力学特性一直备受关注。
而在车辆动力学领域,多自由度车辆动力学模型是一个重要的研究方向。
本文将探讨如何使用C++代码实现多自由度车辆动力学模型,以及其在工程和科研领域的应用。
2. 多自由度车辆动力学模型的概念和原理多自由度车辆动力学模型是用来描述车辆在运动过程中各种自由度(如平动自由度和转动自由度)之间的相互作用和影响关系的数学模型。
它通常包括车辆的运动学模型和动力学模型。
在运动学模型中,我们需要考虑车辆的位姿、速度和加速度等参数;而在动力学模型中,我们则需要考虑外部作用力、惯性力、惯性矩等因素对车辆运动的影响。
3. C++代码实现多自由度车辆动力学模型的基本步骤在实现多自由度车辆动力学模型时,我们可以遵循以下基本步骤:1)定义车辆的几何结构和运动学参数,包括车辆的质心位置、质量分布、惯性矩等;2)构建车辆的动力学模型,考虑外部作用力(如风阻、摩擦力等)、惯性力和惯性矩的影响;3)编写C++代码,实现车辆动力学模型的数学描述,并进行数值模拟;4)考虑车辆的控制系统,如转向系统、刹车系统等,对车辆运动进行控制。
4. C++代码实现多自由度车辆动力学模型的工程应用多自由度车辆动力学模型在工程领域有着广泛的应用。
在汽车制造领域,我们可以利用多自由度车辆动力学模型来预测车辆在不同路况下的运动特性,优化车辆的悬挂系统和驱动系统;在智能驾驶领域,我们可以利用多自由度车辆动力学模型来设计车辆的自动驾驶算法,提高车辆的行驶稳定性和舒适性。
5. 个人观点和总结作为C++代码写手,我认为多自由度车辆动力学模型是一个非常有挑战性和有意义的研究方向。
通过使用C++代码实现多自由度车辆动力学模型,我们可以更好地理解车辆的运动规律,为车辆设计和控制提供有力的工具。
希望未来能够在这一领域取得更多的突破,为汽车工程和智能驾驶技术的发展做出贡献。
车辆动力学模型python
车辆动力学模型是描述车辆运动状态变化的数学模型。
在车辆动力学模型中,常见的模型包括简化的自行车模型、单轮模型、两轮车模型、四轮车模型等。
以下是一个简化的两轮车辆动力学模型的Python示例代码:
python
import math
import numpy as np
import matplotlib.pyplot as plt
# 车辆参数
m = 1000 # 质量(kg)
Iz = 1000 # 车辆绕Z轴的转动惯量(kg*m^2)
lf = 1.1 # 车辆重心到前轴的距离(m)
lr = 1.2 # 车辆重心到后轴的距离(m)
Caf = 80000 # 前轴轮胎的纵向刚度(N/rad)
Car = 120000 # 后轴轮胎的纵向刚度(N/rad)
Vx = 10 # 车辆前进速度(m/s)
# 初始状态
X0 = 0
Y0 = 0
Psi0 = 0
del0 = 0
beta0 = 0
def two_wheeled_vehicle_model(x, t):
# 状态变量
X, Y, Psi, del_, beta = x
# 计算车辆参数
Faf = Caf * math.atan2((beta + lf * Psi), Vx)
Far = Car * math.atan2((beta - lr * Psi), Vx)
# 计算状态变化率
X_dot = Vx * math.cos(Psi + beta)
Y_dot = Vx * math.sin(Psi + beta)
Psi_dot = Vx * math.sin(beta) / lr
del_dot = 0 # 假设方向盘转角保持不变
beta_dot = (lf * Faf * math.cos(del_) - lr * Far) / (m * Vx) - Psi_dot return [X_dot, Y_dot, Psi_dot, del_dot, beta_dot]
# 模拟车辆运动
T = np.arange(0, 10, 0.01) # 时间范围
X = np.zeros(len(T)) # X坐标
Y = np.zeros(len(T)) # Y坐标
Psi = np.zeros(len(T)) # 车辆航向角
del_ = np.zeros(len(T)) # 方向盘转角
beta = np.zeros(len(T)) # 滑移角
# 设置初始条件
X[0] = X0
Y[0] = Y0
Psi[0] = Psi0
del_[0] = del0
beta[0] = beta0
# 模拟车辆运动
for i in range(1, len(T)):
# 使用Euler方法(欧拉方法)进行数值积分
x = [X[i-1], Y[i-1], Psi[i-1], del_[i-1], beta[i-1]] dx = two_wheeled_vehicle_model(x, T[i-1])
X[i] = X[i-1] + dx[0] * (T[i] - T[i-1])
Y[i] = Y[i-1] + dx[1] * (T[i] - T[i-1])
Psi[i] = Psi[i-1] + dx[2] * (T[i] - T[i-1])
del_[i] = del_[i-1] + dx[3] * (T[i] - T[i-1])
beta[i] = beta[i-1] + dx[4] * (T[i] - T[i-1])
# 绘制车辆轨迹
plt.plot(X, Y)
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Vehicle Trajectory')
plt.axis('equal') # 保持坐标轴比例一致
plt.show()
这个示例代码使用欧拉方法对车辆动力学模型进行数值积分,模拟车辆在一段时间内的运动轨迹,并绘制出车辆的轨迹图。
你可以根据实际需求,调整车辆参数和初始状态,以及加入更复杂的车辆动力学模型。