巴克码信号处理的计算机仿真
- 格式:pdf
- 大小:281.03 KB
- 文档页数:3
巴克码信号处理的计算机仿真侯民胜(北京航空工程技术研究中心 北京 100076)摘 要:巴克码信号是二相编码信号的一种,在PD 雷达中得到了广泛应用。
对巴克码信号进行匹配滤波处理可使输出信噪比达到最大。
介绍了匹配滤波器的设计原理,给出白噪声匹配滤波器的传递函数模型。
在Matlab/Simulink 平台上,建立雷达发射信号为巴克码信号时匹配滤波器的仿真模型。
计算机仿真表明,巴克码信号经匹配滤波器后脉冲宽度被压缩,信噪比得到了显著提高。
该滤波器的脉冲压缩功能,解决了一般脉冲雷达通过增加脉冲宽提高作用距离与距离分辨力下降的矛盾。
关键词:巴克码信号;信号处理;匹配滤波器;信噪比;计算机仿真中图分类号:TN95312 文献标识码:B 文章编号:10042373X (2008)232075203Computer Simulation of Signal Processing of B arker CodeHOU Minsheng(Beijing Aeronautical Technology Research Center ,Beijing ,100076,China )Abstract :Barker code signal ,one of the two 2phase code signal ,is used widely in PD radar.Matched filter processing can make the output SNR reach the maximum.The design principle of matched filter is introduced ,and the model of transfer func 2tion of matched filter for white noise is given.Based on Matlab/Simulink ,the simulation model of matched filter for Baker code signal is setup.The simulation show that the pulse width is pressed when the Baker code signal through a matched filter ,and the SNR is enhanced evidently.This matched filter solved the conflict between the raising of detection range and the falling of the range resolution in common pulse radar by pulse pressing.K eywords :Barker code signal ;signal processing ;matched filter ;SNR ;computer simulation收稿日期:2008205212 现代雷达要求既能探测远距离目标,又要有高的距离分辨力[1]。

摘要本课程设计介绍了一种简单的关于双音多频信号的产生与检测的方法。
首先设计了关于双音多频(DTMF)信号的产生与检测的电路图,其中核心部件是MT8870和MC74HC4511;然后通过matlab仿真软件完成对双音多频信号的检测,并采用Goertzel算法对信号进行频谱分析。
关键字:双音多频信号,matlab,Goertzel目录第1章绪论....................................... 错误!未定义书签。
第2章双音多频(DTMF)信号的设计 ................. 错误!未定义书签。
2.1设计目的及意义 .............................. 错误!未定义书签。
2.2双音多频(DTMF)信号的组成 .................. 错误!未定义书签。
2.3DTMF信号的应用 .............................. 错误!未定义书签。
2.4仿真软件介绍 ................................ 错误!未定义书签。
PROTEL软件概述 ................................. 错误!未定义书签。
MATLAB软件概述 ................................. 错误!未定义书签。
2.5电路设计中的核心器件 ........................ 错误!未定义书签。
2.6主要参数设置 ................................ 错误!未定义书签。
3.1双音多频信号的产生 .......................... 错误!未定义书签。
3.2双音多频信号检测 ............................ 错误!未定义书签。
3.3MATLAB工具箱函数GOERTZEL...................... 错误!未定义书签。
*****************实践教学*****************兰州理工大学计算机与通信学院2013年秋季学期通信系统综合训练题目:巴克码识别器的设计与仿真专业班级:姓名:学号:指导教师:彭铎成绩:摘要巴克码是一种具有特殊规律的二进制码组,它是一种非周期序列。
是目前已找到的最常用的群同步码字之一。
它具有尖锐的自相关特性,便于与随机的数字信息相区别,易于识别,出现伪同步的可能性小。
本次课程设计是在掌握群同步码巴克码的基础上,利用MATLAB完成对巴克码识别器的设计。
关键字:巴克码识别器,MATLAB目录前言 (1)1.基本原理 (2)1.1目的及意义 (2)1.2群同步 (2)1.3巴克码 (3)1.4系统设计框图 (3)1.5MATLAB仿真软件 (4)2.系统分析 (6)2.1巴克码的发生 (6)2.2巴克码的判决 (7)2.3巴克码的同步 (8)2.4群同步码 (9)2.5移位寄存器 (10)2.6同步字符的识别性能 (11)3.系统设计与调试 (13)3.1设计思路 (13)3.2调试结果: (14)设计总结 (16)参考文献 (17)致谢 (18)附录 (19)前言同步是通信系统中一个重要的实际问题。
通信系统中的同步可分为载波同步、位同步、帧同步等几大类。
在通信系统中,同步具有相当重要的地位。
通信系统能否有效地、可靠地工作,很大程度上依赖于有无良好的同步系统。
因此,如何使系统同步,如何保持同步,成为现代数字通信系统设计者所面临的重要课题。
在数字通信时,一般总是以一定数目的码元组成一个个的“字”或“句”,即组成一个个的“群”进行传输的。
因此,在接收这些数字流时,同样也必须知道这些“字”、“句”的起止时刻,在接收端产生与“字”、“句”起止时刻相一致的定时脉冲序列,统称为群同步或帧同步。
群同步信号的频率很容易由位同步信号经分频而得出。
但是,每个群的开头和末尾时刻却无法由分频器的输出决定。

巴克码—线性调频脉冲多普勒雷达matlab代码%% 雷达系统仿真 %%% 发射信号为13位巴克码和线性调频混合调制的信号,线性调频的中心频率为30MHz, % 调频带宽为4MHz,每一位码宽为10微秒,发射信号的帧周期为1毫秒 % 该雷达具有数字化正交解调、数字脉冲处理、固定目标对消、动目标检测(MTD)、 % 和恒虚警(CFAR)处理等功能close all;clear all;clc;%%%%%%%%%%%%%%% 产生雷达发射信号 %%%%%%%%%%%%% code=[1,1,1,1,1,-1,-1,1,1,-1,1,-1,1]; % 13位巴克码tao=10e-6; % 脉冲宽度10usfc=28e6; % 调频信号起始频率f0=30e6; % 调频信号中心频率fs=100e6; % 采样频率ts=1/fs; % 采样间隔B=4e6; % 调频信号调频带宽t_tao=0:1/fs:tao-1/fs; % 调制信号,对于线性调频来说,调制信号就是时间序列N=length(t_tao);k=B/fs*2*pi/max(t_tao); % 调制灵敏度,也就是线性调频的步进系数n=length(code);pha=0;s=zeros(1,n*N);for i=1:nif code(i)==1pha=pi;else pha = 0;ends(1,(i-1)*N+1:i*N)=cos(2*pi*fc*t_tao+k*cumsum(t_tao)+pha);endt=0:1/fs:n*tao-1/fs;figure,subplot(2,1,1),plot(t,s); xlabel('t(单位:S)'),title('混合调制信号(13为巴克码+线性调频)'); s_fft_result=abs(fft(s(1:N)));subplot(2,1,2),plot((0:fs/N:fs/2-fs/N),abs(s_fft_result(1:N/2)));xlabel('频率(单位:Hz)'),title('码内信号频谱');%%%%%%%%%%%%%%%%%%% 产生脉冲压缩系数 %%%%%%%%%%%%%%%% %--------------------- 正交解调 --------------------% N=tao/ts;n=0:N-1;s1=s(1:N);local_oscillator_i=cos(2*pi*f0/fs*n); % I路本振信号local_oscillator_q=sin(2*pi*f0/fs*n); % Q路本振信号fbb_i = local_oscillator_i.*s1; % I路解调fbb_q = local_oscillator_q.*s1; % Q路解调window=chebwin(51,40); % 50阶cheby窗的FIR低通滤波器[b,a]=fir1(50,2*B/fs,window);fbb_i=[fbb_i,zeros(1,25)]; % 因为该FIR滤波器有25个采样周期的延迟,为了保证% 所有有效信息全部通过滤波器,故在信号后补25个0fbb_q=[fbb_q,zeros(1,25)];fbb_i=filter(b,a,fbb_i);fbb_q=filter(b,a,fbb_q);fbb_i=fbb_i(26:end); % 截取有效信息fbb_q=fbb_q(26:end); % 截取有效信息fbb=fbb_i+j*fbb_q;%-------- 产生理想线性调频脉冲压缩匹配系数 ---------% D = B*tao;match_filter_1=ts*fliplr(conj(fbb))*sqrt(D)*2/tao;NFFT = 131126;%2^nextpow2(length(s));match_filter_1_fft=fft(match_filter_1,NFFT); % 第一次脉冲压缩处理匹配系数 figure;subplot(2,1,1),plot(real(match_filter_1_fft)),title('脉冲压缩系数(实部)'); subplot(2,1,2),plot(imag(match_filter_1_fft)),title('脉冲压缩系数(虚部)');N=length(s);n=0:N-1;local_oscillator_i=cos(2*pi*f0/fs*n); % I路本振信号local_oscillator_q=sin(2*pi*f0/fs*n); % Q路本振信号fbb_i = local_oscillator_i.*s; % I路解调fbwindow=chebwin(51,40); % 50阶cheby窗的FIR低通滤波器[b,a]=fir1(50,0.5,window);fbb_i=[fbb_i,zeros(1,25)]; % 因为该FIR滤波器有25个采样周期的延迟,为了保证% 所有有效信息全部通过滤波器,故在信号后补25个0fbb_q=[fbb_q,zeros(1,25)];fbb_i=filter(b,a,fbb_i);fbb_q=filter(b,a,fbb_q);fbb_i=fbb_i(26:end); % 截取有效信息fbb_q=fbb_q(26:end); % 截取有效信息signal=fbb_i+j*fbb_q;clear fbb_i;clear fbb_q;clear local_oscillator_i;clearlocal_oscillator_q;signal_fft=fft(signal,NFFT);pc_result_fft=signal_fft.*match_filter_1_fft;pc_result=ifft(pc_result_fft,NFFT); figure,plot((0:ts:length(signal)*ts-ts),pc_result(1:length(signal)));xlabel('t(单位:S)'),title('回波脉冲压缩处理结果');t=tao*length(code);match_filter_2=2*ts*fliplr(conj(pc_result))*2/t;match_filter_2_fft=fft(match_filter_2,NFFT); % 第二次脉冲压缩处理匹配系数figure;subplot(2,1,1),plot(real(match_filter_2_fft)),title('脉冲压缩系数(实部)');subplot(2,1,2),plot(imag(match_filter_2_fft)),title('脉冲压缩系数(虚部)');%%%%%%%%%%%%%%%%%%% 产生雷达回波 %%%%%%%%%%%%%%%%f_frame=1e3; % 雷达发射信号重复频率T_frame=1/f_frame;N_echo_frame=18;f_doppler=3.5e3; % 动目标的多普勒频率t_frame=0:ts:T_frame-ts;t_mobj=200e-6; % 动目标位置echo_mobj_pulse=[zeros(1,t_mobj/ts),s,zeros(1,(T_frame-t_mobj)/ts-length(s))];echo_mobj=repmat(echo_mobj_pulse,1,N_echo_frame);t_doppler=0:ts:N_echo_frame*T_frame-ts;s_doppler=cos(2*pi*f_doppler*t_doppler);s_echo_mobj=echo_mobj.*s_doppler;t_fobj=450e-6; % 固定目标位置echo_fobj_pulse=[zeros(1,t_fobj/ts),s,zeros(1,(T_frame-t_fobj)/ts-length(s))];echo_fobj=repmat(echo_fobj_pulse,1,N_echo_frame);t_clutter=700e-6; % 杂波位置t_clutter_pulse=39e-6;sigma=2; % 杂波瑞利分布参数sigmat1=0:ts:t_clutter_pulse-ts;u=rand(1,length(t1));echo_clutter=0.08*sqrt(2*log(1./u))*sigma; % 产生瑞利分布信号s_echo_clutter_pulse=[zeros(1,t_clutter/ts),echo_clutter,...zeros(1,(T_frame-t_clutter)/ts-length(echo_clutter))];s_echo_clutter=repmat(s_echo_clutter_pulse,1,N_echo_frame);s_noise=0.1*rand(1,N_echo_frame*T_frame/ts);s_echo=s_echo_mobj+echo_fobj+s_echo_clutter+s_noise;%--------------------- 正交解调 --------------------%N=N_echo_frame*T_frame/ts;n=0:N-1;local_oscillator_i=cos(2*pi*f0/fs*n); % I路本振信号local_oscillator_q=sin(2*pi*f0/fs*n); % Q路本振信号s_echo_i = local_oscillator_i.*s_echo; % I路解调s_echo_q = local_oscillator_q.*s_echo; % Q路解调window=chebwin(51,40); % 50阶cheby窗的FIR低通滤波器[b,a]=fir1(50,2*B/fs,window);s_echo_i=[s_echo_i,zeros(1,25)]; % 因为该FIR滤波器有25个采样周期的延迟 % 所有有效信息全部通过滤波器,故在信号后补25个s_echo_q=[s_echo_q,zeros(1,25)];s_echo_i=filter(b,a,s_echo_i);s_echo_q=filter(b,a,s_echo_q);s_echo_i=s_echo_i(26:end); % 截取有效信息s_echo_q=s_echo_q(26:end); % 截取有效信息s_echo_mf=s_echo_i+j*s_echo_q;%%%%%%%%%%%%%%%%%%%%% 脉冲压缩处理 %%%%%%%%%%%%%%%%%%s_pc_result = zeros(N_echo_frame,NFFT);for i=1:N_echo_frames_echo_fft_result=fft(s_echo_mf(1,(i-1)*T_frame/ts+1:i*T_frame/ts),NFFT);s_pc_fft_1=s_echo_fft_result.*match_filter_1_fft;s_pc_fft_2=s_pc_fft_1.*match_filter_2_fft;s_pc_result(i,:)=ifft(s_pc_fft_2,NFFT);ends_pc_result_1=s_pc_result';s_pc_result_1=reshape(s_pc_result_1,1,N_echo_frame*NFFT);figure,subplot(2,1,1),plot((0:ts:N_echo_frame*NFFT*ts-ts),real(s_pc_result_1));xlabel('t(单位:S)'),title('脉冲压缩处理后结果(实部)');subplot(2,1,2),plot((0:ts:N_echo_frame*NFFT*ts-ts),imag(s_pc_result_1)); xlabel('t(单位:S)'),title('脉冲压缩处理后结果(虚部)');%%%%%%%%%%%%%%%%%%%%% 固定杂波对消处理 %%%%%%%%%%%%%%%%%%S_MTI_result = zeros(N_echo_frame-2,NFFT);for i=1:N_echo_frame-2S_MTI_result(i,:)=s_pc_result(i,:)+s_pc_result(i+2,:)-2*s_pc_result(i+1,:);endS_MTI_result_1=S_MTI_result';S_MTI_result_1=reshape(S_MTI_result_1,1,(N_echo_frame-2)*NFFT); figure,subplot(2,1,1),plot((0:ts:(N_echo_frame-2)*NFFT*ts-ts),real(S_MTI_result_1));xlabel('t(单位:S)'),title('固定杂波对消后结果(实部)');subplot(2,1,2),plot((0:ts:(N_echo_frame-2)*NFFT*ts-ts),imag(S_MTI_result_1));xlabel('t(单位:S)'),title('固定杂波对消后结果(虚部)');clear S_MTI_result_1;%%%%%%%%%%%%%%%%%%%%% MTD处理和求模 %%%%%%%%%%%%%%%%%%S_MTD_result_1 = fft(S_MTI_result,N_echo_frame-2);S_MTD_result=abs(max(S_MTD_result_1));figure,plot((0:ts:NFFT*ts-ts),S_MTD_result); xlabel('t(单位:S)'),title('MTD处理后求模结果(信号最大通道)');%%%%%%%%%%%%%%%%%%%%% CFAR处理 %%%%%%%%%%%%%%%%%%cfar_result = zeros(1,NFFT);cfar_result(1,1)=S_MTD_result(1,1)/(sqrt(2)/pi*mean(S_MTD_result(1,2 :17)));% 第1点恒虚警处理的噪声均值由其后面的16点的噪声决定for i=2:16% 第2点到第16点恒虚警处理的噪声均值由其前面和后面16点的噪声共同决定noise_mean=sqrt(2)/pi*(mean(S_MTD_result(1,1:i-1))+mean(S_MTD_result(1,i+1:i+16)))/2;cfar_result(1,i)=S_MTD_result(1,i)/noise_mean; endfor i=17:NFFT-17% 正常的数据点的恒虚警处理的噪声均值由其前面和后面各16点的噪声中的大者决定noise_mean=sqrt(2)/pi*max(mean(S_MTD_result(1,i-16:i-1)),mean(S_MTD_result(1,i+1:i+16)));cfar_result(1,i)=S_MTD_result(1,i)/noise_mean; endfor i=NFFT-16:NFFT-1% 倒数第16点到倒数第2点恒虚警处理的噪声均值由其前面16点和后面的噪声共同决 noise_mean=sqrt(2)/pi*(mean(S_MTD_result(1,i-16:i-1))+mean(S_MTD_result(1,i+1:NFFT)))/2;cfar_result(1,i)=S_MTD_result(1,i)/noise_mean; endcfar_result(1,NFFT)=S_MTD_result(1,NFFT)/(sqrt(2)/pi*mean(S_MTD_resu lt(1,NFFT-16:NFFT-1)));figure,plot((0:ts:NFFT*ts-ts),cfar_result); xlabel('t(单位:S)'),title('采用恒虚警处理结果');。
巴克码信号处理的计算机仿真
侯民胜
【期刊名称】《现代电子技术》
【年(卷),期】2008(31)23
【摘要】巴克码信号是二相编码信号的一种,在PD雷达中得到了广泛应用.对巴克码信号进行匹配滤波处理可使输出信噪比达到最大.介绍了匹配滤波器的设计原理,给出白噪声匹配滤波器的传递函数模型.在Matlab/Simulink平台上,建立雷达发射信号为巴克码信号时匹配滤波器的仿真模型.计算机仿真表明,巴克码信号经匹配滤波器后脉冲宽度被压缩,信噪比得到了显著提高.该滤波器的脉冲压缩功能,解决了一般脉冲雷达通过增加脉冲宽提高作用距离与距离分辨力下降的矛盾.
【总页数】3页(P75-77)
【作者】侯民胜
【作者单位】北京航空工程技术研究中心,北京,100076
【正文语种】中文
【中图分类】TN953.2
【相关文献】
1.电子耳蜗CIS语音信号处理方案的计算机仿真及声音合成 [J], 聂开宝;蓝宁;高上凯
2.生物神经网络计算机仿真中数学建模与信号处理 [J], 陈后金;袁保
宗;DouglasA.Baxter
3.基于巴克码的飞行遥测系统采编器设计 [J], 马文姬;韩焱
4.非相干散射雷达巴克码与交替码自相关函数计算方法研究 [J], 代连东; 丁宗华; 杨嵩; 唐志美; 许正文
5.磁性探伤仪及信号处理电路的计算机仿真研究 [J], 解源;彭超男;集美大学
因版权原因,仅展示原文概要,查看原文内容请购买。
![fsk调制解调设计系统毕业设计(论文)word格式[管理资料]](https://uimg.taocdn.com/a5be96e614791711cd791799.webp)
毕业设计摘要随着社会的不断发展,,,在这方面数字通信系统具有先天的优势。
这主要是因为数字通信系统中传输的是离散的数字信号,由于信号是离散的,被噪声干扰后的信号只要没有超过门限,接收端就能够完全正确地判断出传输的信息;而对于模拟传输系统,只要有稍微的干扰都会使传输的信息产生错误。
也正是由于这样的原因,数字通信系统才能在各方面逐渐代替模拟通信系统成为现代通信的最基本方式。
为了便于区别信号与噪声,使通信不失真和不受干扰,往往给测量信号赋以一定特征,这就是调制的主要功能。
调制就是用一个信号(称为调制信号)去控制另一作为载体的信号(称为载波信号),让后者的某一特征参数按前者变化。
再将测量信号调制,并将它和噪声分离,放大等处理后,还要从已经调制的信号中提取反映被测量值的测量信号,这一过程称为解调。
为了更好地利用通信信道的带宽并使信号能够传送更大的距离, 在数字载波通信中,我们采用了三种解调方式: 幅移键控(ASK)频移键控(FSK)和相移键控(PSK)。
调制信号为二进制信号的调制称为二进制数字调制, 二进制调制又分为二进制幅移键控(2ASK)、二进制频移键控(2FSK)、二进制相移键控(2PSK)和差分二进制相移键控(2DPSK)等多种基本的类型,本课题主要是数字频率调制又称频移键控(FSK)。
同时利用system view软件实现对FSK系统的仿真和分析,从而通过运用模拟的视觉化的手段来实现达到解调调制的目的。
关键词数字通信;FSK信号;非相干数字解调SummaryAlong with society of continuously development, correspondence more and more show to us offor the correspondence technique, the quality of the correspondence also show very of of root mission is how assurance long-distance leave to deliver an information of accuracy, in this aspect numeral correspondence the system have inborn of main is because of numeral correspondence what to deliver be long-lost in the system of numeral signal, because of the signal be long-lost, drive Zao voice interference empress of signal want ~only have no exceed threshold, receive to carry can complete with accuracy judgment the information for deliver;But for imitate to deliver system, as long as have a little bit of the interference will make the information creation for deliver exactly also because of so of reason, numeral correspondence system then can ineveryone's noodles gradual replace imitate correspondence system to become modern correspondence of the most basic the sake of easy to differentiation signal and Zao voice, make correspondence don't lose true with be free from interference, usually give diagraph signal to endow with with certain characteristic, this be the main function for is the signal(be called to carry a signal) which use a signal(be called to make signal) to carry a body to control's another a conduct and actions, let the latter of some characteristic parameter press the former measure signal to make again, and will it with Zao voice separate, after enlarge etc. processing, return want to withdraw reflection from have already make of the signal quilt measured value of measure signal, this process be called solution to bandwidth using correspondence letter way for the sake of better land utilization also make signal can transmission larger of distance, in the numeral carry the wave the correspondence, we adoption three kinds of solution adjust a way: Move key to control(ASK) Pin to move key to control(FSK) with mutually move key to control(PSK).Make signal be called binary system numeral to make for the make of binary system signal, the binary system make and is divided into a binary system to move key to control(2 ASK), the binary system Pin move key to control(2 FSK), the binary system mutually move key to control(2 PSK) with bad cent the binary system mutually move key to control(2 DPSK) etc. variety basic type, this topic main is numeral the frequency make and call Pin to move key to control(FSK).In the meantime make use of system view software realization to imitate FSK system true with analysis, pass an usage imitate thus of the sense of vision turn of means to realization attain solution toadjust of purpose.Keyword:The Pin move key to control、Move key to control、Mutually move key to control、Losetrue、Correspondence.前言系统仿真是20世纪40年代末以来伴随着计算机技术的发展而逐步形成的一门新兴学科。
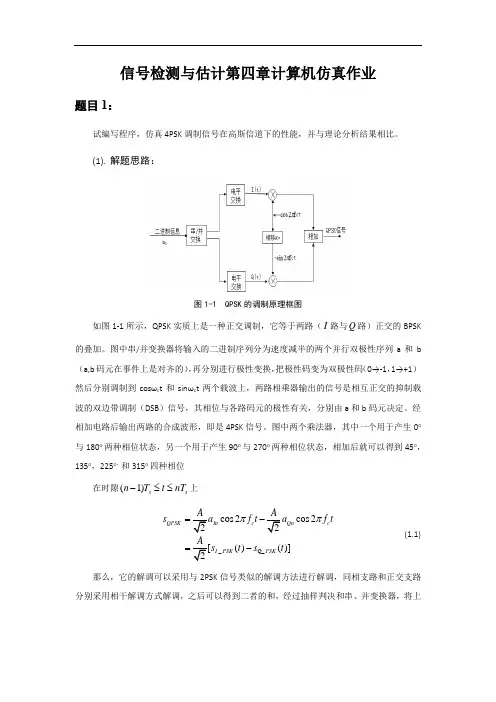
信号检测与估计第四章计算机仿真作业题目1:试编写程序,仿真4PSK 调制信号在高斯信道下的性能,并与理论分析结果相比。
(1). 解题思路:图1-1 QPSK 的调制原理框图如图1-1所示,QPSK 实质上是一种正交调制,它等于两路(I 路与Q 路)正交的BPSK 的叠加。
图中串/并变换器将输入的二进制序列分为速度减半的两个并行双极性序列a 和b (a,b 码元在事件上是对齐的),再分别进行极性变换,把极性码变为双极性码(0→-1,1→+1)然后分别调制到cosωc t 和sinωc t 两个载波上,两路相乘器输出的信号是相互正交的抑制载波的双边带调制(DSB )信号,其相位与各路码元的极性有关,分别由a 和b 码元决定。
经相加电路后输出两路的合成波形,即是4PSK 信号。
图中两个乘法器,其中一个用于产生0o 与180o 两种相位状态,另一个用于产生90o 与270o 两种相位状态,相加后就可以得到45o ,135o ,225o ,和315o 四种相位在时隙(1)s s n T t nT -≤≤上_Q_cos 2cos 2()()]QPSK In c Qn c I PSK PSK s f t f t s t s t ππ==-(1.1)那么,它的解调可以采用与2PSK 信号类似的解调方法进行解调,同相支路和正交支路分别采用相干解调方式解调,之后可以得到二者的和,经过抽样判决和串、并变换器,将上图1-2 QPSK 解调原理框图下之路得到的并行数据恢复为串行数据。
那么此时就得到我们最初的原始信号,它的解调原理图如图1-2所示。
再来分析QPSK 的误比特性能,因为QPSK 的每个四元符号所包含的两个比特都独立,并行地按照BPSK 传输,各比特的传输误比特率均为_2s psk P (相当于2PSK 的无比特率),显然QPSK 系统与2PSK 系统具有完全相同的误比特性能,即_412e PSK P erfc =(1.2)(2). 仿真结果仿真性能曲线如图1-3所示:图1-3 QPSK 高斯信道下的性能仿真曲线101010101010101010SNRQPSK,高斯信道下的性能曲线误比特率题目2:试编写程序,画出相干移频键控、非相干移频键控(无衰落)和瑞利衰落信道下非相干移频键控的性能曲线。
巴克码发生器一、实验目的1.实现一个在通信领域中经常使用的巴克码发生器。
2.掌握用大规模可编程逻辑器件实现时序电路的方法。
二、实验仪器与器材1.EDA开发软件一套2.微机一台3.实验开发系统一台4.打印机一台5.其他器材与材料若干三、实验说明巴克码发生器在数据通信、雷达和遥控领域有相当广泛的应用。
它能自动产生周期性的序列。
本实验要求产生的序列码信号为{1110010},可以用寄存器或同步时序电路实现。
为了能够通过实验开发系统验证试验效果,可以使用两个输出端,其中一个输出端同时输出巴克码,另一个输出端输出节拍。
四、实验步骤1.巴克码的VHDL程序如下:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;entity bakema isport(clk:in std_logic;dout,zhishi:out std_logic); end entity ;architecture behave of bakema issignal count7:integer range 0 to 6; beginprocess(clk)beginzhishi<=not clk;if clk'event and clk='1' thenif count7<6 thencount7<=count7+1;else count7<=0;end if;end if;end process;process(count7)begincase count7 iswhen 0=>dout<='1';when 1=>dout<='1';when 2=>dout<='1';when 3=>dout<='0';when 4=>dout<='0';when 5=>dout<='1';when 6=>dout<='0';when others=>dout<='0';end case;end process;end behave;3.在这里用数码管和一个发光二极管作为指示节拍,另一个发光二极管显示产生的巴克码,随着数码管显示1到7,二极管显示1110010序列。
西南科技大学课程设计报告课程名称:数字信号处理与通信原理课程设计设计名称:8PSK通信系统的蒙特卡罗仿真分析姓名:李烨学号:20064611班级:通信0601指导教师:龙惠民起止日期:2009.6。
20-2009。
7.3西南科技大学信息工程学院制课程设计任务书学生班级:通信0601 学生姓名:李烨学号:20064611 设计名称: 8PSK通信系统的蒙特卡罗仿真分析起止日期:2009。
6。
20-2009.7。
3指导教师: 龙惠民课程设计学生日志课程设计考勤表课程设计评语表8PSK通信系统的蒙特卡罗仿真分析一、设计目的和意义1.对8psk进行调制和解调,通过MATLAB编程,掌握MATLAB的使用,熟练掌握8PSK的调制原理,解调原理。
2.对8PSK通信系统进行蒙特卡罗仿真分析,分析起信噪比和差错率。
为现实中通信系统的调制,解调,及信道传输进行理论指导。
二、设计原理1.8PSK的调制八进制移相键控(8PSK)调制。
由于8PSK将GMSK的信号空间从2扩展到8,因此每个符号可以包括的信息是原来的4倍。
8PSK的符号率保持在271kbps,每个时隙可以得到69。
2kbps的总速率,并且仍然能够完成GSM频谱屏蔽。
对于高速传输,为了提高频带利用率,多采用多进制调制方法,在一个波形周期(0,TS)内发送多个二进制符号。
频带利用率能成倍增加。
8PSK,载波有(0,p/4,p/2,3p/4, p,5p/4 ,3p/2,7p/4 )八种不同的初相,可以在一个波形周期(0,TS)内发送3个二进制符号(000,001,010,011,100,101,110,111)。
频带利用率能达到6b/S/HZ。
由于8PSK信号幅度不是恒定的,因此,被调制信号将不再保持恒定幅度,它必须能够从任何起点到达任何相位位置。
这意味着8-PSK信号的幅度变化很大,这给RF放大器带来了较大压力,而且可能会导致进一步失真.通过8PSK设计的增强功能,即3π/8旋转则能够降低较大的幅度变化。
lfm信号和巴克码信号的模糊函数仿真。
一、引言随着通信技术的不断发展,人们对信号的传输速度、带宽等要求也越来越高,如何有效地传输信息成为一个热门话题。
在数字通信中,LFM 信号和巴克码信号因其独特的特性被广泛使用。
本文将介绍LFM信号和巴克码信号的模糊函数仿真。
二、LFM信号的模糊函数仿真LFM信号有着独特的线性调频特性,它的频率随时间呈线性变化。
LFM 信号模糊函数主要用于检测脉冲信号的时间延迟和速度,所以它的时间分辨率和速度分辨率是一对重要的参数。
1. LFM信号的数学表达式在时域上,LFM信号的数学表达式为:s(t)=exp(jπbt^2)其中t为时间,b为调频带宽,s(t)为LFM信号。
2. LFM信号的模糊函数仿真过程在Matlab软件中,仿真LFM信号的模糊函数可以使用以下代码实现:%定义LFM信号的参数b=10000; %调频带宽为10000HzT=1/b; %调频时间f0=1e9; %初始频率为1GHzFs=10*f0; %采样率为10倍的信号带宽t=linspace(0,T,round(T*Fs)); %生成时间序列s=exp(1j*pi*b.*t.^2); %生成LFM信号%计算LFM信号的模糊函数tau=linspace(-T/2,T/2,round(T*Fs)+1);af=abs(fftshift(fft(s,round(T*Fs))))/max(abs(fft(s,round(T*Fs ))));AF=abs(fftshift(fft(af,round(T*Fs))))/max(abs(fft(af,round(T*Fs))));AF_db=20*log10(AF);plot(tau,AF_db)三、巴克码信号的模糊函数仿真巴克码信号是一种二进制码,具有良好的频谱特性,易于传输。
它在通信中被广泛应用,如数字广播、数字电视、卫星通信等。
巴克码信号的模糊函数主要用于检测信号的时间延迟和频偏。
《信号处理的工程应用》课程考查试题说明: 三道题全部完成,解答附在题目后面,完成后打印装订后上交,同时将电子版发至下列电子信箱:ruikel@1、学习超外差式频谱分析仪的原理,重点论述分辨率带宽(RBW)定义、特性以及和扫描范围、扫描时间等参数的关系。
2、设计一种16-QAM调制解调方案,信源速率和调制频率等参数自定,完成调制和解调计算机仿真,给出调制器输出、解调器各节点信号波形等仿真结果,并作必要的说明。
3、学习了解雷达信号处理中匹配滤波器的原理、特点和应用,完成线性调频脉冲信号或13位巴克码二相编码调频脉冲信号的匹配滤波器计算机仿真。
仿真参数自定,分别给出匹配滤波器输出信号波形和模糊函数图形,并作必要的说明。
解答部分1、图3-1所示为超外差式频谱分析仪的原理方框图:图3-1可知,超外差式频谱分析仪由输入衰减器、混频器(混频器与输入衰减器和本地振荡器连接)、中频放大器、中频滤波器、峰值检波器、视频滤波器、扫描产生器和显示器组成。
现将每一部分功能介绍如下。
输入衰减器:频谱分析仪的输入端有一个可变衰减器,调整频谱分析仪输入信号电平的大小,控制进入混频器的输入电平,以免损坏仪器。
如果输入混频器的信一号电平太高,可能引起信号失真,从而影响测量精度;如果信号电平太低,则被测信号可能被频谱仪中存在的嗓声所掩盖。
在这两个问题中,任何一个都会减小测量的动态范围。
混频器:微波频谱仪的混频器把射频输入信号混频成频谱仪能滤波、放大和检波的频率范围内。
混频器除了接收RF输入信号之外,还接收来自频谱仪内部产生的本振信号。
混频器是一个非线性器件。
所谓非线性,就是指在混频器输出中,存在着输入信号频率之外的频率分量。
在混频器的输出信号中,除r输入信号频率和本振频率之外,还包含本振(LO)频率和输入信号频率的和频和差频。
本振:本振不是在一个固定频率上振荡,而是一个电压控制的振荡器,本振频率由扫描产生器控制。
扫描产生器除控制本振频率外,还控制频谱仪显示器的水平偏移,其斜波形状使频谱仪在显示器上从左到右显示信号信息,且扫描迹线通过显示屏的扫描速度是可以控制的。
线性调频-巴克码雷达信号的分析与处理第23卷第1期2005年3月广西师范大学(自然科学版) JOURNALOFGUANGXINORMALUNIVERSITYV o1.23No.1March2005线性调频一巴克码雷达信号的分析与处理马银玲,田忠(电子科技大学电子工程学院,四川成都610054)摘要:介绍了一种新型的雷达信号,该雷达信号是一种采用脉内和脉间混合编码的脉冲压缩信号.通过理论推导和分析得出混合信号的频谱与子脉冲线性调频信号的频谱基本相同,这个结果与用计算机模拟所得结论一致;分析该混合信号的处理机理并且给出这种信号的一种处理方法.关键词:信号处理;线性调频(LFM);巴克(Barker)码;雷达信号中图分类号:TN957.51文献标识码:A文章编号:1001—6600(2005)01"0009—04在雷达系统中,线性调频(LFM)信号和二相编码(Bc)信号是广为采用的脉冲压缩信号.它们具有各自的特点.文献[1]给出了一类新型脉冲压缩雷达信号,这类信号既同时具有线性调频(LFM)信号与二相编码(Bc)信号的优点,又能弥补各自的不足,为雷达波形抗侦察,抗干扰提供了一种新的途径.本文以线性调频一巴克码(LFM—Barker),P一13为例,对这类雷达信号进行分析,从该混合信号的时域表达式出发,经过推导及理论计算得到相关结论.理论分析表明所得结论与计算机仿真模拟所得的结果完全一致.通过该混合信号的模糊函数,阐明对这类混合雷达信号进行数字处理的机理,并给出它的处理框图.1LFM—Barker码雷达信号及其频谱分析线性调频一二相编码(LFM—BC)雷达信号是把宽脉冲分成若干个子脉冲,在子脉冲间进行相位编码,在子脉冲内进行线性调频而成的一类混合信号.LFM—Barker码信号是其中的一种.LFM—Barker码信号时域表达式可以写成:"(f)一"1(f)"2(f).(1)其中:o表示求线性卷积;"(f)一(f)?rect(t/T)ej/√丁为线性调频信号的时域表达式;(f)一Ec(f—丁)/√为巴克码信号的时域表达式.式中:(f)一{/√,o<<T,T为子脉冲的宽度,P为码长,C为13位巴克码的二进制序列,K—10,其他B/T,B为LFM信号的带宽.由(1)式及傅立叶变换的性质可以得到,LFM—Barker码信号的频谱应为LFM信号与13位巴克码信号频谱的乘积."(f)经傅立叶变换得到U(,):(厂)一Ce/√,(2)所以,LFM—Barker码信号在[一B/2,B/2-]频率范围内的频谱为:收稿日期:2004—08—01基金项目:国家军事电子基金资助项目作者简介:马银玲(1976一),女,河南驻马店人,电子科技大学硕士研究生;田忠(1968一),男,湖北荆门人,电子科技大学副教授,硕士.10广西师范大学(自然科学版)第23卷(厂)一(厂)?U:(厂):(厂)?[∑C,,,e-jz]/,于是,信号的功率谱的表达式可以写成:IU(厂)I一IU(厂)I?IU:(厂)其中IU2(厂)Iz一【,:(厂).(厂)一[∑P--1r][∑P--ICf们].一P一1一一古[∑+∑∑CiC,e卜J.一P一1一一古[P+2∑z()cos271].(3)(4)式中z():+,表示二元伪随机序列的非周期自相关函数.通常伪随机序列具有性质: --一1--fP.m一0mJ,=z'一22.,+m—I口《P,m一一1,2,...,P一1,一0I口《.=1._/.. (1).P一1一所以有IU:(厂)I=piP+2∑z()cos271]≈1,由此可得I(厂)I一IU(厂)I?IU2(厂)I≈IU(厂)(5)P一1式(3)和(5)表明该混合信号的频谱主要取决于子脉冲的频谱U(厂).U:(厂)一ce—j2*rfrn的作用与所采用码的形式有关,以P一13为例,因为13位巴克码序列具有良好的非周期自相关特性,则混合信号的功率谱与LFM子脉冲的功率谱基本相同.用MATLABE.软件对以上分析过程进行仿真,仿真结果如图1~4.图中所取参数分别为:信号的带宽B一30MHz,信号的周期71:4肛s,采样频率一150MHz.20501000f/MHz50100f/MHz图1LFM子脉冲的频谱图2LFM—Barker码信号的频谱Fig.1LFMsub—pulsespectrumFig.2LFM—Barkerspectrum多次仿真的结果表明:当B71》1时,LFM信号的幅度谱在[一B/2,B/23内接近矩形,对于混合信号也有类似的结论.对比以上仿真结果不难发现:混合信号的频谱主要由LFM子脉冲的频谱决定,它们的功率谱也基本相同.由此可见,理论分析与仿真结果是一致的.计算还表明,混合信号的带宽B与子脉冲的带宽相近,即B一1/71.混合信号压缩后的脉冲幅度为压缩前的P√D倍(其中,D为信号的压缩倍数),压缩后的脉冲宽度为1/B.相当于子脉冲宽度为1/B,码长为P√D的二相码的压缩结果.2LFM—Barker码信号的处理LFM—Barker码信号的模糊函数为:第1期马银玲等:线性调频一巴克码雷达信号的分析与处理▲.u..…...●ITI~--一一..~'.'图3LFM子脉冲的幅度谱Fig.3LFMsub—pulseamplitudespectrumP一1▲-~……..一一▲●『I…'一…一叮1t1图4LFM—Barker码信号的幅度谱Fig.4LFM—Barkeramplitudespectrum(r,)一2-,1(r—,)?2(mT,)一1(r,)'2(r,),(6)辨;一(尸一1)其中(r,)和.(r,)分别为LFM信号和13位巴克码信号的复合自相关函数,',表示对r 卷积.(6)式说明,LFM—Barker码信号的自相关函数是LFM信号和13位巴克码信号的自相关函数共同作用的结果.也就是说,LFM—Barker码信号的匹配滤波输出波形是由LFM信号和13位巴克码信号的压缩波形复合而成.所以,对该信号的处理要取得满意的效果,必须:①对LFM子脉冲进行失配处理,以获得最大的主旁瓣比;②抑制13位巴克码信号的旁瓣.由于脉冲压缩系统是线性的,在理论分析上可以将混合信号的脉冲压缩分解成两个过程完成,即依次进行线性调频脉冲压缩和相位编码脉冲压缩.在实际处理中,是将两个匹配滤波函数合成一个,通过一次脉压完成对混合信号的压缩.混合信号脉压后的旁瓣取决于线性调频信号,采用加窗处理后的脉压旁瓣则主要取决于巴克码信号.如果加窗处理后的信号不满足指标要求,还可以采用二相码旁瓣抑制滤波器进一步降低混合信号的旁瓣.图5是该混合信号的处理框图.图中匹配滤波器1,2分别匹配于LFM子脉冲和13位巴克码信号,子脉冲加窗用来降低LFM信号压缩输出的主副瓣比,加权网络用来在一定范围内消除13位巴克码的距离旁瓣.信号I匹配II匹配II子脉冲II加权I压缩输入l婆垫量Il婆遂墨Il!!旦查II圆I输出图5混合信号的处理框图Fig.5LFM~Barkersignalprocessprinciple3结束语LFM—Barker码信号是一种新型的脉冲压缩雷达信号,理论分析表明它具有多种优良的性能,综合了线性调频信号和相位编码信号的特点.其距离分辨率,速度分辨率和脉压增益都明显高于纯线性调频或相位编码信号,弥补了单一线性调频或相位编码信号的缺点,以小时宽,小带宽获得大信噪比改善,避免了大时宽和大带宽带来的问题.而且混合信号具有更复杂的波形形式,进一步提高了雷达的抗侦察,抗干扰能力.随着数字技术的发展,该信号必将在雷达系统中得到广泛应用.参考文献:[1]徐庆,徐继麟.线性调频一二相编码雷达信号分析[J].系统工程与电子技术,2000,22(12):7—8.[2]林茂庸,柯有安.雷达信号理论[M].北京:国防工业出版社,1984.161.F33约翰?G?普罗克斯,马苏德?萨勒赫.现代通信系统——使用MATLAB[M].刘树棠.西安:西安交通大学出版社,2OO1.6--40.12广西师范大学(自然科学版)第23卷ANAL YSISANDPROCESSoFTHELFM—BARKERCODERADARSIGNALMAYin-ling,TIANZhong(SchoolofElectronicEngineering?UniversityofElectronicScienceandTechnologyofChin a,Chengdu610054,China)Abstract:Anewimpulsecompressionradarsignalisintroducedinthispaper.Thesignalhasac ombinedchirpwaveformwithbinarypseudorandomsequences.Throughthetheoreticalanalysis,the conclusionthatsub—pulsespectrumalmostequalstohybridsignalspectrumisobtained,andtheresultsareassame asthatofcomputersimulation.Itsmechanismisanalyzedandaprocessingmethodofthepulse —com—poundsignalisgiven.Keywords:signalprocess;LFMsignal;Barkercode;radarsignal(责任编辑李小玲)(自然科学版)被教育部评为全国高校优秀科技期刊一等奖由教育部组织专家评审的2004年全国高校优秀科技期刊评比活动已揭晓,我校的《广西师范大学(自然科学版)》(下简称《》)榜上有名,被评为一等奖,编辑部副主编李小玲荣获"2004年全国高校科技期刊优秀编辑工作者"称号.据悉,本次评比活动共评选出各类优秀科技期刊180种,其中一等奖60种,二等奖120种;优秀编辑工作者161人;优秀编辑学论着146篇(本),其中一等奖'31篇(本),二等奖115篇(本).79种科技期刊获优秀编辑出版质量奖.近年来,《》的学术质量不断提高,各项综合指标大幅度上扬.《~2003年底公布报告的两项期刊重要指标影响因子和基金论文比,在广西科技期刊中名列第一.2004年3月份,《》被国家科技部收录为"中国科技论文统计源期刊",并被认定为"中国科技核心期刊";同年5月,《》被北京大学图书馆等单位和专家共同确定为"综合性科学技术类"核心期刊,入编《中文核心期刊要目总览92004年版(gP第四版).迄今为止,《》已进入《中国科技论文统计源期刊》,《中文核心期刊要目总览》,《中国科学引文数据库来源期刊》,《中国核心期刊(遴选)数据库》4个我国当前主要的"核心期刊目录". 《(马殷华摘编) %錾%。
线性调频-巴克码雷达信号的分析与处理
马银玲;田忠
【期刊名称】《广西师范大学学报(自然科学版)》
【年(卷),期】2005(023)001
【摘要】介绍了一种新型的雷达信号,该雷达信号是一种采用脉内和脉间混合编码的脉冲压缩信号.通过理论推导和分析得出混合信号的频谱与子脉冲线性调频信号的频谱基本相同,这个结果与用计算机模拟所得结论一致;分析该混合信号的处理机理并且给出这种信号的一种处理方法.
【总页数】4页(P9-12)
【作者】马银玲;田忠
【作者单位】电子科技大学,电子工程学院,四川,成都,610054;电子科技大学,电子工程学院,四川,成都,610054
【正文语种】中文
【中图分类】TN957.51
【相关文献】
1.线性调频-巴克码雷达信号旁瓣抑制方法 [J], 王党卫;秦江敏;马晓岩
2.线性调频和巴克码组合调制雷达信号 [J], 于超鹏;郝亮飞;谢金华
3.线性调频信号脉压加权处理对雷达测距影响分析 [J], 孙全;高雅
4.线性调频和巴克码组合调制雷达信号性能分析 [J], 彭智慧;林明
5.线性调频信号脉压加权处理对雷达测距影响分析 [J], 孙全高雅
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的巴克码信号发生器与译码器
张增良;焦智;周涛
【期刊名称】《北华航天工业学院学报》
【年(卷),期】2005(015)003
【摘要】本文利用CPLD设计了一个11位的巴克码信号发生器,该发生器具有单次和连续输出功能,同时也设计出了一个11位的译码器来驱动发光二极管,当接收到巴克码时发光二极管亮,没有检测到时则发光二极管灭.
【总页数】4页(P16-19)
【作者】张增良;焦智;周涛
【作者单位】北华航天工业学院,电子工程系,河北,廊坊,065000;北华航天工业学院,电子工程系,河北,廊坊,065000;北华航天工业学院,电子工程系,河北,廊坊,065000【正文语种】中文
【中图分类】TN914.3
【相关文献】
1.基于CPLD的BCH码编/译码器的设计与实现 [J], 张高记;罗朝霞
2.基于FPGA/CPLD的LED/LCD通用显示译码器设计 [J], 邓翔宇
3.基于CPLD的HDB3编译码器 [J], 贾惠彬;王兰勋
4.基于CPLD的HDB3码编译码器设计 [J], 敖天勇;侯卫周;杨毅;郭立俊
5.基于CPLD的HDB3码编译码器的设计 [J], 乔继红;顾伟娟
因版权原因,仅展示原文概要,查看原文内容请购买。
巴克码信号处理的计算机仿真侯民胜(北京航空工程技术研究中心 北京 100076)摘 要:巴克码信号是二相编码信号的一种,在PD 雷达中得到了广泛应用。
对巴克码信号进行匹配滤波处理可使输出信噪比达到最大。
介绍了匹配滤波器的设计原理,给出白噪声匹配滤波器的传递函数模型。
在Matlab/Simulink 平台上,建立雷达发射信号为巴克码信号时匹配滤波器的仿真模型。
计算机仿真表明,巴克码信号经匹配滤波器后脉冲宽度被压缩,信噪比得到了显著提高。
该滤波器的脉冲压缩功能,解决了一般脉冲雷达通过增加脉冲宽提高作用距离与距离分辨力下降的矛盾。
关键词:巴克码信号;信号处理;匹配滤波器;信噪比;计算机仿真中图分类号:TN95312 文献标识码:B 文章编号:10042373X (2008)232075203Computer Simulation of Signal Processing of B arker CodeHOU Minsheng(Beijing Aeronautical Technology Research Center ,Beijing ,100076,China )Abstract :Barker code signal ,one of the two 2phase code signal ,is used widely in PD radar.Matched filter processing can make the output SNR reach the maximum.The design principle of matched filter is introduced ,and the model of transfer func 2tion of matched filter for white noise is given.Based on Matlab/Simulink ,the simulation model of matched filter for Baker code signal is setup.The simulation show that the pulse width is pressed when the Baker code signal through a matched filter ,and the SNR is enhanced evidently.This matched filter solved the conflict between the raising of detection range and the falling of the range resolution in common pulse radar by pulse pressing.K eywords :Barker code signal ;signal processing ;matched filter ;SNR ;computer simulation收稿日期:2008205212 现代雷达要求既能探测远距离目标,又要有高的距离分辨力[1]。
高的距离分辨力要求有极窄的脉冲宽度,这就限制了发射功率的增加,从而影响雷达的探测距离。
采用脉冲压缩技术,发射宽脉冲信号,接收时经脉冲压缩后变成窄脉冲,可以解决雷达作用距离和距离分辨力之间的矛盾[2]。
脉冲压缩雷达的发射信号一般为调频信号和二相编码信号。
在有限的二相编码序列中,巴克码序列为最佳序列,它具有理想的自相关特性,在PD 雷达中得到了广泛的应用[3]。
1 巴克码特性相位编码信号的一般表达式为[4]: s (t )=∑N -1n =0rect 1T(t -nT )exp (j2πf 0t +θn )(1)式中,f 0为信号频率,N 为码长度,T 为子脉冲宽度,θn为巴克码相位,取0或π。
其复包络信号为:u (t )=∑N -1n =0rect 1T(t -nT )exp (j θn )(2) 巴克码序列是相位编码信号的一种,具有理想的自相关特性。
巴克码的自相关函数的主峰和旁瓣均为底边宽度为2T 的等腰三角形,主瓣峰值是旁瓣峰值的13倍。
目前能够找到的巴克码只有7种,子脉冲长度分别为:2,3,4,5,7,11,13。
已经证明巴克码的最大长度为13位。
对式(1)取傅里叶变换可得到巴克码信号的频谱:U (f )=T sinc (f T )∑N -1n =0c nexp (-j2πf n T )(3)式中,c n =exp (θn ),取1或-1。
2 巴克码信号的匹配处理现代雷达信号处理系统的设计一般都采用匹配滤波器,使输出信噪比达到最大。
根据最佳匹配理论,白噪声环境下,巴克码信号最佳匹配滤波器的传输函数为[5]:H (f )=kU 3(f )(4)式中,k 为常数,U (f )为巴克码信号的频谱。
巴克码信号最佳匹配滤波器的组成如图1所示。
第一级为子脉冲匹配滤波器,第二级为一个延迟加权网络。
57《现代电子技术》2008年第23期总第286期 通信与信息技术图1 巴克码信号最佳匹配滤波器的组成框图上述方案对于不同的雷达信号,匹配滤波器的结构不同。
采用数字信号处理技术,可使匹配处理器具有通用性,即适用不同的雷达信号。
数字信号处理方案是在频域进行的,通过对雷达信号进行快速傅里叶变换FF T 和共轭变换,求匹配滤波器传输函数然来实现。
3 巴克码信号处理的计算机仿真3.1 仿真模型随着计算机技术和仿真技术的发展,计算机仿真技术被广泛应用于雷达系统设计领域,在一定程度上可以替代外场测试,降低雷达研制的成本和周期[6]。
本文在Matlab/Simulink 平台上建立了巴克码信号处理的计算机仿真模型[7]。
图2是采用数字信号处理方案的仿真模型组成框图。
图2 巴克码匹配滤波仿真模型由于采用数字处理技术,信号源需表示成离散形式。
巴克码信号的仿真模型为:u (n )=exp (j φ(n ))(5)φ(n )=00000ππ00π0π0 mod (n ,13Δ)≤ΔΔ<mod (n ,13Δ)≤2Δ2Δ<mod (n ,13Δ)≤3Δ3Δ<mod (n ,13Δ)≤4Δ4Δ<mod (n ,13Δ)≤5Δ5Δ<mod (n ,13Δ)≤6Δ6Δ<mod (n ,13Δ)≤7Δ7Δ<mod (n ,13Δ)≤8Δ8Δ<mod (n ,13Δ)≤9Δ9Δ<mod (n ,13Δ)≤10Δ10Δ<mod (n ,13Δ)≤11Δ11Δ<mod (n ,13Δ)≤12Δ12Δ<mod (n ,13Δ)≤13Δ(6) 式(6)中:Δ=fix (T/T s ),T 为子脉冲宽度,T s 为采样周期,fix 取趋于零的最近整数。
噪声模型可由DSP 工具箱直接给出。
巴克码信号进行FF T 变换(先补零)和共轭变换后可得到巴克码信号匹配滤波器的传输函数。
信号+噪声进行FF T 变换(先补零)后得到其频谱函数,与传输函数相乘后即为频率响应,再经IFF T 变换输出时域波形。
3.2 仿真结果图3是子脉冲宽度T =1μs 的巴克码信号波形,图4是不加噪声信号时匹配滤波器的输出波形。
仿真结果表明,巴克码信号经匹配滤波器后,主瓣幅度为副瓣幅度的13倍,即:副瓣电平为2213dB ,脉冲宽度压缩为原来的1/13。
采用组合巴克码的方法,即对每一个码元再进行编码,可进一步提高压缩比。
图3 巴克码信号波形图4 滤波器输出巴克码信号波形图5是信噪比为-10dB 时匹配滤波器的输出波形。
在输入端信号已完全淹没在噪声中,而由输出信号波形可知,信噪比得到了很大提升。
图5 滤波器输出的信号+噪声波形为进一频抑制副瓣电平,可增加一级与图1相似的延迟加权网络,延迟时间为2倍的子脉冲宽度(图4所示)。
由于主瓣和旁瓣之间有良好的相似性,通过加权网络可消除主瓣旁边的旁瓣。
由于信号的对称性,加权67军事通信侯民胜:巴克码信号处理的计算机仿真系数也是对称的,设为:a 6,a 5,a 4,a 3,a 2,a 1,a 0,a 1,a 2,a 3,a 4,a 5,a 6。
加权系数满足下面的方程组:13a 0+2a1+2a 2+2a 3+2a 4+2a 5+2a 6=13a 0+14a 1+2a 2+2a 3+2a 4+2a 5+a 6=0a 0+2a 1+14a 2+2a 3+2a 4+a 5+a 6=0a 0+2a 1+2a 2+14a 3+a 4+a 5+a 6=0a0+2a 1+2a 2+a 3+13a 4+a 5+a 6=0a 0+2a 1+a 2+a 3+a 4+13a 5+a 6=0a 0+a 1+a 2+a 3+a 4+a 5+13a 6=0 解得:a 0a 1a 2a 3a 4a 5a 6=+1.0477-0.0407-0.0456-0.0501-0.0543-0.0581-0.0615 经进一步抑制副瓣处理后的输出波形如图6所示。
输出波形在-12T ≤t ≤12T 的旁瓣为0,副瓣电平又降低了大约10dB 。
4 结 语巴克码信号是二相编码信号的一种。
计算机仿真表明,13位巴克码信号经匹配滤波器后脉冲宽度被压缩为1/13,主瓣幅度为副瓣幅度的13倍,信噪比得到了显著提高。
为进一步提高压缩比,可对每一码元再进行编码。
通过增加延迟加权网络,可进一步降低副瓣电平。
巴克码信号匹配滤波器的脉冲压缩功能,解决了一般脉冲雷达通过增加脉冲宽(信号能量增加)提高作用距离与距离分辨力下降的矛盾。
图6 副瓣抑制后的输出波形参 考 文 献[1]向敬成.雷达系统[M ].北京:电子工业出版社,2001.[2]赵国庆.雷达对抗原理[M ].西安:西安电子科技大学出版社,1999.[3]徐庆,徐继麟.线性调频———二相编码雷达信号分析[J ].系统工程与电子技术,2000,22(12):728.[4]毛士艺,张瑞生.脉冲多谱勒雷达[M ].北京:国防工业出版社,1990.[5]承德保.现代雷达反对抗技术[M ].北京:航空工业出版社,2002.[6]侯民胜,金梅.脉冲雷达干扰高度表的计算机仿真研究[J ].电子测量技术,2007,30(12):326.[7]王宇鹏,王振荣.基于Matlab 匹配雷达图像与光学图像[J ].电子测量技术,2007,30(9):1402142.作者简介 侯民胜 男,1964年出生,高工。
从事雷达、电子对抗、电磁兼容等技术研究。
G oogle 会推出自己的操作系统吗? 这里是Andrew Morton 关于这个问题的答案(Andrew Morton 被称为Linux 的二号人物,是Linux kernel 最主要的维护人,并于2006年加入G oogle ):“开发(操作系统)需要的资源和测试内核、基础应用、窗口系统是相当庞大的一项工程。