生物电子与影像技术第六章图像复原
- 格式:ppt
- 大小:2.26 MB
- 文档页数:85


一.实验名称:图像退化与复原二.实验目的1.了解光电图像的退化原因;2.掌握和理解基本的噪声模型,并能对图像进行加噪处理;3.了解点扩展函数(PSF)与光学传递函数(OTF)的关系,熟悉几种经典的退化模型的模拟试验和 OTF 估计方法;4.熟悉和掌握几种经典的图像复原方法与其基本原理;5.能熟练利用 MATLAB 或 C/C++工具进行图像的各种退化处理,并能编程实现退化图像的复原。
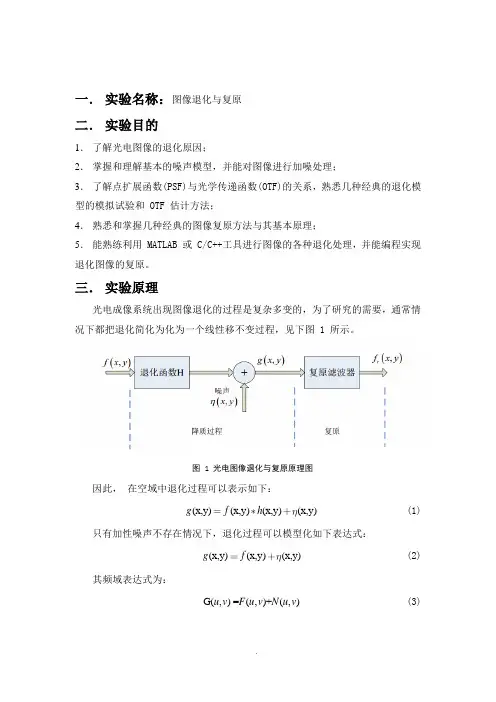
三.实验原理光电成像系统出现图像退化的过程是复杂多变的,为了研究的需要,通常情况下都把退化简化为化为一个线性移不变过程,见下图 1 所示。
图 1 光电图像退化与复原原理图因此,在空域中退化过程可以表示如下:g f h(1)(x,y)(x,y)(x,y)(x,y)只有加性噪声不存在情况下,退化过程可以模型化如下表达式:g f(2)(x,y)(x,y)(x,y)其频域表达式为:u (3)v v=(,)+(),)G,(F u v N u针对这种退化图像的复原,除了周期噪声以外,通常都可以采用空间域滤波的方法进行图像复原,此时图像复原与图像增强几乎是没有区别的。
常见的空间域滤波方法有均值滤波器和统计排序滤波器。
当退化图像存在线性移不变退化时,图像的复原不能采用简单空间域滤波器来实现,要实现线性移不变退化图像的复原,必须知道退化系统的退化函数,即点扩展函数(x,y)h 。
在点扩展函数已知的情况下,常见图像复原方法有逆滤波和维纳滤波两种。
在考虑噪声的情况下,逆滤波的原理可以表示如下:()()()()()()G u,v N u,v F u,v F u,v H u,v H u,v(4)通常情况下,()N u,v 是未知的,因此即使知道退化模型也不能复原图像。
此外,当,H u v 的任何元素为零或者值很小时,,/,N u v H u v 的比值决定着复原的结果,从而导致图像复原结果出现畸变。
对于这种情况,通常采用限制滤波频率使其难以接近原点值,从而减少遇到零值的可能性。
《生物电子与影像技术》实验指导哈尔滨工业大学(威海)控制科学与工程系实验一:图像处理基本操作与灰度变换1. 基础知识1)Matlab支持的图像格式TIFF, JEPG, GIF, BMP, PNG, XWD (X Window Dump),其中GIF不支持写。
2)与图像处理相关的最基本函数读:imread; 写:imwrite; 显示:imshow; 信息查看:imfinfo;3)Matlab支持的数据类型double, unit8, int8, uint16, int16, uint32, int32, single, char (2 bytes per element), logical.4)Matlab支持的图像类型Intensity images, binary images, indexed images, RGB image5)数据类及图像类型间的基本转换函数数据类转换:B = data_class_name(A);6)Matlab的灰度直方图函数显示imhist, 均衡化histeq7)Matlab的图像灰度变换图像滤波imfilter (image, filter) 灰度变换imadjust2. 图像信息显示与图像读写>> imfinfo('parrots.bmp') %%图像文件信息显示FileModDate: '27-Sep-2010 19:42:59'FileSize: 1179702FormatVersion: 'Version 3 (Microsoft Windows 3.x)'ColorType: 'truecolor'……>> imfinfo('pollen.tif') %%图像文件信息显示FileModDate: '27-Sep-2010 19:42:59'FileSize: 250398FormatVersion: []ColorType: 'grayscale'……>> img=imread('parrots.bmp'); %%读入图像文件到内存变量>> imshow(img); %%图像显示>> whos img %%显示变量信息Name Size Bytes Classimg 512x768x3 1179648 uint8 array Grand total is 1179648 elements using 1179648 bytes>> imwrite(img, 'NewParrots.png'); %%以其它格式另外保存图像>> img2=imread('pollen.tif');>> whos img2Name Size Bytes Classimg2 500x500 250000 uint8 arrayGrand total is 250000 elements using 250000 bytes>> figure, imshow(img2);3. 直方图显示与均衡化>> im=imread('pollen.tif'); %%读入图像文件>> size(im) %%观察2维还是3维ans = %% 如果是3维,使用im=im(:,:,1); 转成2维500 500>> subplot(221), imshow(im) %%显示原图像>> subplot(222), imhist(im) %%显示直方图>> im2=histeq(im); %%直方图均衡化>> subplot(223), imshow(im2) %%显示均衡化后的图像>> subplot(224), imhist(im2) %%显示均衡化后的图像的直方图4. 灰度变换函数形式:J = imadjust(I,[low_in; high_in],[low_out; high_out], Gamma)参数Gamma用于指定变换函数形状,小于1时,输出更亮,大于1时,输出更暗。
数字图像处理论文——图像复原技术的研究院系:信息科学与工程学院专业班级:姓名:学号:摘要:运动模糊图像的复原是图像复原中较常见也是较难的一类,在智能交通系统中有着广泛的应用。
本文面向车牌识别应用,对运动模糊图像的复原技术进行了系统的研究与实现。
匀速直线运动模糊图像复原的关键在于运动模糊方向和长度的自动鉴别两个方面。
将原图像视为各向同性的一阶马尔科夫过程,通过用双线性插值来进行方向微分,实现了运动模糊方向的自动鉴别算法;根据分析模糊图像的频谱图出现黑色条带的原因、条件以及它的精确位置,实现了运动模糊长度自动鉴别算法。
针对复杂成像情况下的运动模糊图像复原工作,着重解决了含噪运动模糊图像和局部运动模糊图像的复原问题;综合应用椒盐噪声检测器和基于带可变正则化参数的径向基神经网络(I也FN)方法,实现了组合滤波器去噪算法,采用改进的局部运动模糊对象提取算法实现局部运动模糊图像的复原。
开发了车牌模糊图像复原系统。
该系统对模糊长度和模糊角度均具有较高的鉴别精度,对于含有噪声的运动模糊图像和局部模糊图像进行相应的去噪处理和对局部模糊对象进行提取,并提供参数调整机制以获得最佳的复原效果。
自动实现各种类型的运动模糊车牌图像的清晰恢复,复原的效果图可直接应用于后续的车牌识别等工作。
关键字:图像复原,运动模糊,模糊方向,模糊长度,噪声,局部模糊,车牌识别说明与相关工作-图像复原的研究背景和现状图像复原是数字图像处理中的一个重要课题。
它的主要目的是改善给定的图像质量并尽可能恢复原图像。
图像在形成、传输和记录过程中,受多种因素的影响,图像的质量都会有不同程度的下降,典型的表现有图像模糊、失真、有噪声等,这一质量下降的过程称为图像的退化。
图像复原的目的就是尽可能恢复被退化图像的本来面目。
在成像系统中,引起图像退化的原因很多。
例如,成像系统的散焦,成像设备与物体的相对运动,成像器材的固有缺陷以及外部干扰等。
成像目标物体的运动,在摄像后所形成的运动模糊。