多旋翼飞行原理
- 格式:pptx
- 大小:1.04 MB
- 文档页数:27

多旋翼evtol技术原理全文共四篇示例,供读者参考第一篇示例:随着城市交通越来越拥挤,传统陆地交通方式的瓶颈日益凸显。
人们对于更高效、更便捷的出行方式的需求也越来越迫切。
而在这个背景下,多旋翼eVTOL技术成为了备受瞩目的交通未来方向之一。
eVTOL(Electric Vertical Takeoff and Landing)即垂直起降式电动飞行器,是一种以电动推进系统为动力的垂直起降无人机。
相比于传统的飞行器,eVTOL在动力系统、起降方式、飞行模式等方面都具有独特的优势。
而多旋翼则是一种多个旋翼共同工作,实现飞行的飞行器结构形式,可实现垂直起降和稳定飞行。
多旋翼eVTOL技术的原理主要包括以下几个方面:1. 电动推进系统:eVTOL采用电动推进系统作为动力装置,相比传统的燃油动力,在能源利用效率、环保性等方面更具优势。
电动推进系统包括电池、电动机、电子速控等组件,通过电能转化为机械能驱动旋翼转动,实现飞行。
2. 多旋翼结构:多旋翼eVTOL采用多个旋翼进行协同工作,使得飞行器能够实现垂直起降和稳定飞行。
不同于传统直升机的旋翼数量较少,多旋翼eVTOL通常采用4个以上的旋翼作为动力装置。
3. 飞行控制系统:多旋翼eVTOL飞行过程中需要进行精准的飞行控制,以实现稳定飞行和精准操作。
飞行控制系统包括传感器、控制算法、执行机构等多个部分,通过实时监测飞行状态和环境情况,以及调节电力输出和控制旋翼转速,实现飞行器的操控。
4. 高度保护系统:在多旋翼eVTOL飞行中,高度保护系统是至关重要的。
通过高度传感器实时监测飞行器的高度,以及控制飞行器的升降,确保飞行器在不同高度下的稳定飞行和安全降落。
5. 能量管理系统:eVTOL飞行器的电池容量和能量管理系统设计对于飞行时间、载荷能力等方面都有着重要影响。
能量管理系统需要根据飞行任务需求和电池状态实时调整能源输出,以确保飞行器能够完成飞行任务。
多旋翼eVTOL技术的发展不仅可以改变未来城市交通的面貌,也有望推动航空运输行业的进步。
多旋翼无人机俯仰运动原理今天咱们来唠唠多旋翼无人机俯仰运动的原理,这可超有趣的呢!你看啊,多旋翼无人机就像一个小小的空中精灵。
那它的俯仰运动是怎么做到的呢?这就得从它的几个旋翼说起啦。
多旋翼无人机有好多旋翼,一般是四个或者六个,就像小翅膀一样。
想象一下,当无人机想要做俯仰运动的时候,就像是小鸟在点头或者抬头。
前面的旋翼和后面的旋翼就开始“商量”着干活啦。
如果无人机要向前做俯仰运动,也就是头向下低,那前面的旋翼就会转得慢一点,或者说力量变小一点。
而后面的旋翼呢,就会加大马力,转得更快或者力量更大。
这样一来,后面的旋翼产生的升力就比前面的大啦。
就好像后面有人在用力地往上抬,前面有点往下压,无人机的头就自然地低下去,开始向前做俯仰运动啦。
反过来说,如果无人机想要抬头,做向后的俯仰运动呢?哈哈,这时候就轮到前面的旋翼威风啦。
前面的旋翼会加大力量,转得更快,而后边的旋翼就会适当减弱力量,转得慢一些。
这样前面的升力大,后面的升力小,无人机的头就抬起来,往后仰着走喽。
这就像是一群小伙伴在玩跷跷板一样。
你这边用力多一点,那边用力少一点,跷跷板就会倾斜。
多旋翼无人机的前后旋翼就像跷跷板两边的小伙伴,通过调整各自的力量,也就是旋翼的转速和产生的升力,来让无人机做出俯仰的动作。
而且啊,这个过程还得特别精确呢。
就像厨师做菜,盐放多放少都不行。
如果前后旋翼的力量调整得不合适,那无人机可就不是优雅地俯仰啦,可能就会像喝醉酒的小鸟一样,东倒西歪的。
再从另外一个角度想,多旋翼无人机的这种俯仰运动原理,其实就像是我们在平衡木上调整重心一样。
当我们想往前倾的时候,就把重心往前挪一点,在无人机上,就是通过改变前后旋翼的升力来“挪动”重心,让它做出俯仰动作。
你知道吗?这种俯仰运动在无人机的飞行中可太重要啦。
比如说,当无人机要飞过一个障碍物的时候,它可以通过俯仰来调整姿态,顺利地飞过去。
就像我们跑步的时候要低头或者抬头避开树枝一样。
又或者当无人机要拍摄一些特定的画面,像从低角度往上仰拍一个宏伟的建筑,它就得做出精确的俯仰运动,这样才能拍出超酷的照片和视频呢。
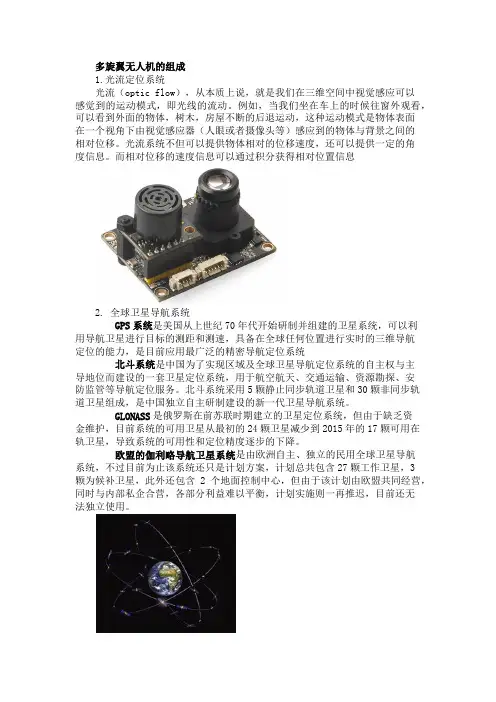
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。

孩子们玩的无人机起飞原理
无人机的起飞原理主要有以下几种方式:
1. 固定翼无人机:固定翼无人机起飞依赖于空气动力学原理。
通过无人机上的电动螺旋桨产生推力,同时通过机翼的空气动力学设计产生升力。
当推力大于或等于重力时,无人机就能够起飞。
2. 多旋翼无人机:多旋翼无人机主要依靠自身的多个旋翼产生升力来进行起飞。
这些旋翼一般为螺旋桨,由电机提供动力。
通过调整旋翼的转速和角度,控制无人机在空中的升降、俯仰、横滚和偏航等动作。
3. VTOL垂直起降无人机:VTOL无人机(Vertical Take-Off and Landing)是指能够实现垂直起降的无人机。
这类无人机通常同时具备固定翼和多旋翼的特点,可以在狭小的空间内垂直起降,并在空中以固定翼的方式飞行。
无论是哪种起飞方式,无人机起飞的关键就是通过电动螺旋桨或旋翼产生足够的升力以克服重力,从而使无人机离地。
而通过对电动螺旋桨或旋翼的控制,可以实现无人机的起飞、悬停、飞行和降落等动作。

多旋翼正常飞行倾斜角度概述及解释说明1. 引言1.1 概述本文将对多旋翼正常飞行倾斜角度进行概述和解释说明。
多旋翼是一种常见的无人机类型,通过多个电动马达驱动并控制旋转的螺旋桨来实现飞行。
在多旋翼飞行过程中,倾斜角度起着重要的作用,影响着其稳定性和性能。
1.2 文章结构本文主要包含四个部分:引言、正文、解释说明和结论。
引言部分将简要介绍本文的内容概述以及文章的结构安排。
正文部分将详细探讨多旋翼飞行原理、倾斜角度对飞行的影响以及测量方法。
解释说明部分将阐述多旋翼正常飞行倾斜角度的定义和范围、影响因素以及与稳定性之间的关系。
最后,结论部分将总结多旋翼正常飞行倾斜角度的重要性与应用场景,并提出优化和控制建议以及未来发展方向。
1.3 目的本文旨在深入了解多旋翼正常飞行倾斜角度,并揭示其在多旋翼飞行中的重要性和影响。
通过对倾斜角度的测量、分析和控制,可以提升多旋翼的稳定性和飞行性能,推动多旋翼技术的持续进步。
本文还将针对未来可能的发展方向和挑战进行探讨,以促进该领域更好地满足不同应用需求。
2. 正文:2.1 多旋翼飞行原理多旋翼是一种由多个旋翼组件组成的飞行器,每个旋翼都可以产生升力,并通过改变各个旋翼的转速实现飞行、悬停和转弯等动作。
多旋翼的飞行原理基于空气动力学中的牛顿第三定律,即对每个向下排放气流的气体力有一个等大反方向的反作用力。
2.2 倾斜角度对多旋翼飞行的影响倾斜角度指的是多旋翼在飞行过程中机身相对于水平面的倾斜角度。
倾斜角度直接影响了多旋翼在不同飞行阶段表现出的特性。
当多旋翼呈现前倾姿态时,它可以加快水平速度并减少下降速率;而后倾姿态则会减小速度、增加升力并提高机身稳定性。
2.3 多旋翼正常飞行倾斜角度的测量方法测量多旋翼正常飞行倾斜角度可以采用传感器技术,在无人机上安装三轴陀螺仪、加速度计和磁力计等传感器。
通过这些传感器可以实时监测多旋翼的姿态,并根据姿态信息计算出倾斜角度。
3. 解释说明:3.1 多旋翼正常飞行倾斜角度的定义和范围多旋翼正常飞行倾斜角度指的是在平稳飞行状态下,多旋翼呈现的机身倾斜角度范围。