SVPWM交流调速系统的建模与仿真
- 格式:pdf
- 大小:302.28 KB
- 文档页数:3

交流电机SPWM调速系统建模与动态仿真1交流电机调速原理正弦脉宽调制技术SPWM (Sine Pulse Width Modulation)是用所期望的正弦波为“调制波”(Modulation Wave),而以N倍于调制波频率的三角波为“载波”(Carrier Wave)的一种逆变器控制技术。
SPWM技术的控制的特点是原理简单、通用性强、控制方便、调节灵活,能有效降低谐波分量、稳定输出电压,是一种比较好的波形改善法,在目前中小型逆变器中获得了广泛的应用。
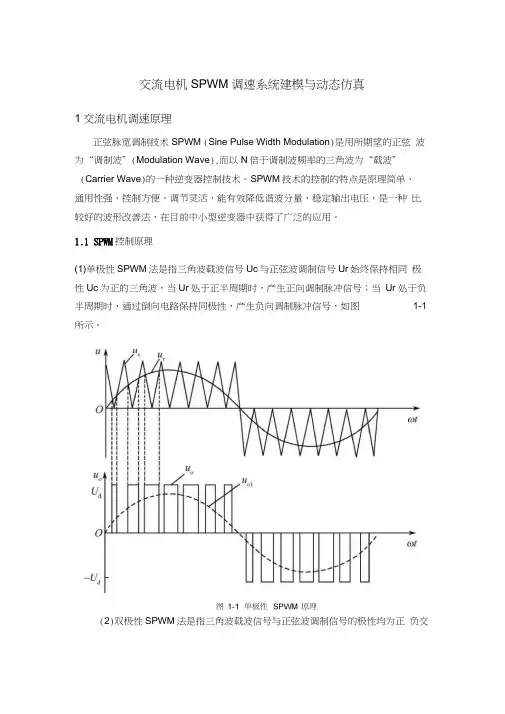
1.1 SPWM控制原理(1)单极性SPWM法是指三角波载波信号Uc与正弦波调制信号Ur始终保持相同极性Uc为正的三角波,当Ur处于正半周期时,产生正向调制脉冲信号;当Ur 处于负半周期时,通过倒向电路保持同极性,产生负向调制脉冲信号,如图1-1所示。
(2)双极性SPWM法是指三角波载波信号与正弦波调制信号的极性均为正负交替改变,如图1-2所示。
载波信号Uc为正负对称的三角波,调制信号Ur 直接与Uc 进行比较,便可得到双极性SPWM脉冲。
对于三相逆变器来说,载波信号Uc可以三相共用;由正弦波发生器产生三相相位相差120°的可变幅,变频的正弦波信号Uru、Urv和Urw分别作为三相调制信号。
三相调制信号分别于Uc进行比较,可获得三相SPWM信号,利用三相SPWM信号控制相应的电子开关的开通和关断,便可得到三相双极性SPWM输出电压。
图1-2双极性SPWM原理1.2 SPWM的控制算法常用的生成SPWM波的控制算法主要有自然采样法和对称规则采样法(本文只介绍这两种)。
(1)自然采样法:按照正弦波与三角波的交点进行脉冲宽度与间隙时间的采样,从而生成SPWM波形,称为自然采样法,如图1-3所示,图中Tc为载波周期,S为脉冲宽度。
自然采样法采用计算的方法寻找三角载波Uc与参考正弦波Ur的交点作为开关值以确定SPWM的脉冲宽度,这种方法误差小、精度高,但是计算量大,难以做到实时控制,用查表法将占用大量内存,调速范围有限,一般在实际的机算计控制中不采用。

![PMSM调速系统SVPWM控制的建模仿真[1]](https://uimg.taocdn.com/279561c689eb172ded63b7c4.webp)

基于DSP和FPGA的交流伺服 PMSM 由于高转矩、低损耗、脉动小、电气时间常数小等物理特点,使其成为高精数控加工的最佳执行机构。
开发一个基于交流永磁伺服电机的高精度,快响应、强稳定性的伺服系统有着十分重要的实际意义。
本文首先对交流伺服系统的基本概况做了阐述,推导了永磁同步电机的数学模型,介绍了电压空间矢量的控制方法,设计了三闭环控制系统,给出了位置环、速度环和电流环控制器的设计方法,其中对位置环和速度环采用了鲁棒性很强的滑模变结构控制方法,对电流环采用了经典的PI控制,通过MATBAL仿真验证了此控制系统的可行性。
在硬件结构上采用IPM+DSP+FPGA结构,其中IPM功率模块完成功率驱动,DSP完成控制算法和通讯,FPGA完成对霍尔信号的检测、码盘信号的读取、键盘的扫描、显示器的动态刷新、保护信号的处理等功能。
此结构使DSP和FPGA充分发挥各自的优势,同时在性能上还弥补了各自的不足,节约了大量时间和资源,提高了系统的性能。
最后对整个系统的软件做了介绍,给出了主要部分的流程图及部分代码。
关键字:交流伺服;PMSM;DSP;FPGA;SVPWM;滑模变结构控制;PIReseach of AC Servo System based on DSP And FPGAAbstractWith the rapid development of the AC servo technology which based on power electronics technology and microprocessor technology, the AC servo system has been appliced in CNC machine tools, household appliances and many other industrial products widely. PMSM Permanent Magnet Synchronous Motor has many good characteristics such as high torque, low wastage, low pulse, low electric time constant and etc, which make PMSM become the best implement in high precise CNC. Herefore, it is of practical significance to develop high accuracy, fast response and strong stability servo control system.First of all, the general situation about AC servo technology is given. On the base of introducing the mathematics model of PMSM, SVPWM method is put forward. Secondly the paper degigns a three close loop contol system, giving the designing details in position loop controller, speed loop and the circuit loop. The position loop and the speed loop take the sliding mode variable control method which has high robustness and the circuit loop takes the classical PI control method. According to the result of simulation by MATBAL, the system is feasible.Then the paper introduces the hardware system based on IPM+DSP+FPGA. IPM module accomplishes power diver. DSP finishes the works including AC servo control algorithm and the communication. FPGA achieves the purposes including detecting thehall signal, reading code disc signal, scanning the keyboard, dynamic refreshing the LED display, dealing with protection signal and etc. This hardware system makes DSP and FPGA full play each one’s advantages and make up each one’s disadvantages, which not only saves much time, but also improved the efficiency of whole system. Finally, the paper introduces the software system by giving the main flow chart and some codes.Keywords: AC servo; PMSM;DSP; FPGA; SVPWM; sliding mode variable control; PI第1章绪论- 1 -1.1交流伺服系统简介 - 1 -1.2交流伺服系统的发展过程与趋势- 2 -1.3交流伺服系统的控制方案- 4 -1.4本文的研究目的和意义及内容安排 - 5 -第2章PMSM的结构和数学模型- 7 -2.1 PMSM的结构- 7 -2.2 PMSM的数学模型- 8 -2.3 本章小结- 11 -第3章 PMSM交流伺服系统的控制方案 - 13 -3.1 PMSM的矢量控制系统- 13 -3.2 位置环和速度环滑模变结构控制器的设计- 17 - 3.3 电流环PI控制器的设计- 23 -3.4 本章小结- 27 -第4章 PMSM交流伺服系统仿真- 28 -4.1 SVPWM仿真- 28 -4.2 PMSM交流伺服系统仿真- 31 -第5章 PMSM交流伺服系统的硬件设计 - 37 -5.1 交流伺服硬件系统的总体结构 - 37 -5.2 主功率电路- 37 -5.3 DSP硬件系统- 41 -5.4 FPGA硬件系统- 44 -5.5 DSP和FPGA总线接口电路 - 50 -5.6 系统电源电路 - 51 -5.7 本章小结- 53 -第6章 PMSM交流伺服系统的软件设计 - 54 - 6.1 软件的总体设计方案- 54 -6.2 DSP软件系统- 54 -6.3 FPGA软件系统- 64 -6.4本章小结- 68 -第7章总结与展望- 69 -参考文献- 71 -第1章绪论1.1交流伺服系统简介伺服来自英文单词Servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。

附 SVPWM 的仿真实现1 SVPWM 的基本原理SPWM 常用于变频调速控制系统,经典的SPWM 控制主要目的是使变频器的输出电压尽量接近正弦波,并未关注输出的电流波形.而矢量控制的最终目的是得到圆形的旋转磁场,这样就要求变频器输出的电流波形接近正弦波。
锁定得到圆形的旋转磁场这一目标,SVPWM 控制技术利用逆变器各桥臂开关控制信号的不同组合,使逆变器的输出电压空间矢量的运行轨迹尽可能接近圆形。
SVPWM 是从电动机的角度出发,着眼于使电机获得幅值恒定的圆形磁场.图1所示为PWM 逆变器的拓扑结构以及等效开关模型。
AS B S CS 4622d U 2d U 0'135A B C逆变器拓扑结构 等效开关模型图1 PWM 逆变器电路电压源型逆变器常采用180ο导通型。
用A B C S S S 、、分别标记三个桥臂的状态,规定当上桥臂器件导通时桥臂状态为1,下桥臂导通时桥臂状态为0,当3个桥臂的功率开关管变化时,就会得到328=种开关模式,每种开关模式对应一个电压矢量,矢量的幅值为23d U ;有两种开关模式对应的电压矢量幅值为零,称为零矢量。
例如:在某一时刻,设V1,V2,V3管处于开通状态,即10a b c s s ,s ===,设为三相对称负载,各开关管的开通电阻均相等,则逆变器的等效电路为:图2 10a b c s s ,s ===时逆变器的等效电路图这样,很容易就能得到该瞬时时刻的相电压:112333AN d BN d CN d v U ,v U ,v U ===- (1)将其在静止坐标系中表示出来,如图3所示:图3 10a b c s s ,s ===电压矢量图其中,U 是合成的电压矢量,在两相静止坐标系(,αβ坐标系)下,利用相电压合成电压矢量U 的表达式:U 2433j j AN BN CN k(v v e v e )ππ=++ (2)其中,k 为三相静止坐标系向两相静止坐标系转换的变换系数,变换分为基于等功率的坐标变换和基于等量的坐标变换,这里选择等量的坐标变换,则23k =,式(2)即为:U(3)将式(1)的具体数值代入上式,则有:U 1323j d U e π= (4)这样就得到了10a b c s s ,s ===开关状态下的电压矢量,按照同样的方法分析另外7种开关状态,可以分别得到每种开关状态所对应的电压矢量,总结为表1所示。
SVPWM仿真与分析电压空间矢量控制技术是把逆变器和交流电动机视为一体,以圆形旋转磁场为目标来控制逆变器的工作,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的。
把逆变器和交流电动机视为一体,以圆形旋转磁场为目标来控制逆变器的工作,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的。
第一章SVPWM基本原理随着微电子技术、计算机控制技术以及电力电子技术的发展,正弦脉宽调制(SPWM)策略已广泛应用于交流变频调速系统中,但是SPWM方法不能充分利用馈电给逆变器的直流电压;SPWM是基于调节脉冲宽度和间隔来实现接近于正弦波的输出电流,但是仍会产生某些高次谐波分量,引起电机发热、转矩脉动甚至系统振荡;另外,SPWM适合模拟电路,不便于数字化实现。
在交流电机调速的磁通轨迹控制思想的基础上,发展产生了电压空间矢量脉宽调制(SVPWM)方法。
SVPWM物理概念清晰、算法简单且适合数字化实现,在输出电压或电机线圈电流中产生的谐波少,提高了对电压源逆变器直流供电电源的利用率。
1.13s/2s变换交流电动机三相对称绕组通以三相对称电流可以在电动机气隙中产生空间旋转的磁场,在功率不变的条件下,按磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效。
这就是矢量坐标变换中的三相静止坐标系和两相静止坐标系的变换(简称3S/2S变换)。
如图1-1所示。
对三相电进行3S/2S变换,将u,u,u分解到u,u坐标轴上。
可有:abc a Pu=u一ucos60。
一ucos60。
a abcu-0u+ucos30。
一ucos30。
式i-iP abc整理可得:式1-2c图1-13S/2S 变换对于三相交流电u ,u ,u 有:abcu -U cos (®t )am<u -U cos (①t —120。
)b mu —U cos (®t +120。
) cm 将u ,u ,u 代入式1-2中,可得结果:abcu auPUcosmsin在进行3s/2s 变换时,希望得到等幅值变换,所以式1-2 式1-3式1-4中添加一个系数C=2/3。
合肥工业大学硕士学位论文三电平SVPWM算法研究及仿真姓名:李启明申请学位级别:硕士专业:电力电子与电力传动指导教师:苏建徽20071201第1章绪论1.1三电平技术研究意义能源短缺和环境污染是人类当前面临的共同的世纪性难题。
20世纪70年代以来两次世界性的能源危机以及当前环境问题的严重性,引起世界各国对节能技术的广泛关注。
我国能源生产和消费已列世界前茅,但仍远远满足不了工业生产和人民生活发展的需要。
由于缺电,正常的生产秩序被打乱,造成巨大的经济损失;在能源十分紧张的情况下,浪费现象仍十分严重。
例如,在工业用电中,高压大功率电机拖动的风机、水泵占很大比例,这些设备每天都在消耗大量的电能。
如果采用高压大容量变频调速装置拖动交流电机,对降低单产能耗具有重大意义。
在轧钢、造纸、水泥、煤炭、铁路及船舶等工业和生活领域中也广泛使用大中容量高性能交流电机调速系统。
此时,交流调速系统的应用可改善工艺条件,实现整个系统的性能最佳,并大大提高生产效率和产品质量。
另外,解决环境污染的重要途径是发展高速公共交通工具(如电力机车、城市地铁和轻轨),其核心也是大容量交流电机调速技术。
然而,随着交流调速及电力电子装置等非线性设备在工业、交通及家电中的大量应用,电网中的无功和谐波污染日益严重。
电力系统中的无功和谐波降低了电能的生产、传输和利用的效率,同时降低了电器设备运行的可靠性,严重时损坏设备、危及电网的安全。
以柔性交流输电系统(FACTS)技术为代表的大功率电力电子技术,在电力系统中的应用可大幅度改善电力系统可控性及可靠性,提高输电线路的传输能力及系统的安全稳定性。
在柔性交流输电系统中,采用高压大容量电力电子装置构成的无功补偿和电力有源滤波器无疑是一个发展趋势。
从20世纪90年代以来,以高压IGBT、IGCT为代表的性能优异的复合器件的发展引人注目,并在此基础上产生了很多新型的高压大容量变换拓扑结构,成为国内外学者和工业界研究的重要课题,使得传统上在大功率应用领域中占主导地位的SCR、GTO及其变换器结构受到强有力的挑战。
SVPWM算法建模与仿真分析摘要:本文以直驱永磁风电机组网侧电压数学模型为基础,利用Matlab软件建立了空间矢量调制SVPWM算法数学模型。
论文阐述了利用Matlab软件建立扇形区域N、扇区相邻的两零矢量作用时间和各扇区矢量切换点,然后对各子模块进行了仿真,最后根据仿真结果验证了可靠性。
关键词:SVPWM;Matlab仿真;数学建模0 引言PWM变流器的电压为脉冲电压,并且谐波分量较多,使得电源利用率极低,而空间矢量控制技术,即SVPWM,是对直驱永磁同步发电机中三相变流器功率元件的一种针对特有的脉冲大小和开关触发信号的唯一组合,该技术可在三相对称正弦量上产生一个圆形的磁链,从而确定PWM的6个IGBT开关情况,让实际产生的磁链接近圆形轨道,从而使电压利用率得到提升[1]。
与传统SPWM技术相比,有如下优点:电压利用率高;在波形品质相同的状态下,可大大降低功率开关管的额外损耗;控制动态特性很好,可以更好的跟踪电流指令[2]。
1 算法模型的建立与仿真1.1 直驱永磁风电机组数学模型建立由直驱永磁风力发电机组并网侧电压数学模型[4],可得出如下式子:(1.1)将8(23)种开关0、1组合代入上式,这样可以得到三相并网时相对应输出的电压值,如表3.1所示。
表1.1 并网时相对应输出的电压S a S b S c u a u b u c V k000000V0001-U dc/3-U dc/32U dc/3V5010-U dc/32U dc/3-U dc/3V3011-2U dc/3U dc/3U dc/3V41002U dc/3-U dc/3-U dc/3V1101U dc/3-2U dc/3U dc/3V6110U dc/3U dc/3-2U dc/3V2111000V7由表1.1中可以看出,有效的工作矢量共6个,分别为V1,V2;V3,V4;V5,V6;模值均为2Udc/3,相位空间角度相差30°(360°/6),另外存在两个零矢量,分别为V0,V7。
三电平SVPWM算法研究及仿真三电平SVPWM算法研究及仿真一、引言近年来,随着电力电子技术的不断发展,交流调速系统在工业领域得到广泛应用。
为了实现高精度的交流调速,研究人员提出了各种调制技术。
在这些技术中,多电平逆变器作为交流调速系统中最重要的部分之一,其控制算法的研究和优化具有重要意义。
三电平空间矢量调制(SVPWM)算法作为一种较为有效的调制技术,广泛应用于多电平逆变器中,本文主要围绕三电平SVPWM算法的研究及仿真展开。
二、三电平SVPWM算法原理三电平SVPWM算法是采用空间矢量图形方法决定逆变器输出电压矢量的调制技术。
它通过将逆变器的输出电压矢量离散化为六个等效矢量,进而形成一种或多种适用于逆变器的控制信号。
在三电平逆变器中,根据电网的工作状态和逆变器的负载需求,可以得到逆变器的输出电压的各个组分,进而得到逆变器的输出电压矢量。
三、基于三电平SVPWM算法的控制策略在三电平逆变器应用中,SVPWM算法可用于控制逆变器输出电压的矢量。
具体而言,SVPWM算法包含以下三个步骤:1. 根据电网的输入电压和逆变器的输出电压需要,确定合适的工作模式;2. 确定逆变器输出电压矢量;3. 根据逆变器输出电压矢量,确定合适的控制信号。
四、三电平SVPWM算法的仿真实验本文采用MATLAB/Simulink软件对三电平SVPWM算法进行仿真实验。
仿真电路包括电网、三电平逆变器和负载三个部分。
仿真实验的主要目的是验证三电平SVPWM算法在逆变器输出电压调制方面的优势。
在仿真实验中,通过改变电网的输入电压、逆变器输出电流以及负载的变化来观察三电平SVPWM算法的性能。
五、仿真结果分析仿真结果表明,三电平SVPWM算法能够有效地通过控制逆变器的输出电压矢量,实现对电机的精确控制。
在不同工作负载下,三电平SVPWM算法能够实现较低的失真度和较高的功率因数。
此外,仿真结果还显示,三电平SVPWM算法具有较高的效率和稳定性,在实际应用中具有一定的可行性。
SPWM在交流调速系统中的应用:班级:学号:目录序言 (2)1.正弦脉宽调制SPWM型逆变器基础理论 (2)1.1正弦脉宽调制(SPWM) (3)1.2 SPWM波的调制条件 (5)2.三相SPWM逆变电路带星型负载的仿真 (5)2.1建立三相SPWM仿真模型: (6)2.2仿真结果分析 (7)3.三相异步电机调速系统SPWM电压型逆变器的仿真 (10)3.1 建立模型基础概念 (10)3.2 SPWM电压型逆变器矢量仿真模型的建立 (11)3.3 仿真结果及其分析 (13)序言交流电机传动的电力机车是由电压型、电流型交直交变流器供电的异步电机组成的系统,包括整流器,直流中间环节,和逆变部分。
而逆变器是控制 6个半导体开关器件组成的三相桥式逆变电件的通断,可以得到不路。
按照一定规律控制同频率的三相交流输出各半导体开关器件的通断,可以得到不同频率的三相交流输出。
本文针对逆变环节,在理论分析的基础上,对针对带一般星型电感性负载,和在三相异步电机的情况下分别进行了MATLAB仿真,并对负载突然变动时的情况进行了讨论(添加一个阶跃转矩),在对三相异步电机进行仿真时,采用了转差频率控制的矢量控制模型,即使在负载变动的情况下,系统仍能在很短的时间达到稳定,可见其具有很好的调速性能。
为了简便起见,本文仅针对电压源型逆变环节进行讨论,所以在MATLAB仿真中,直流中间环节采用直流电源替换,电压源型逆变器的原理图如下图所示:电压型逆变器1.正弦脉宽调制SPWM型逆变器基础理论所谓PWM(Pulse Width Modulation)是用直流斩波的方法,将逆变器的输出相电压调制成幅值相等的若干个矩形电压脉冲,通过调节占空比改变脉冲宽度,即可改变输出电压的大小,而调节一个周期的循环开断时间可改变输出电压频率,从而在逆变器上实现VVVF 的综合控制。
下图是PWM 变频器的主电路原理图,图中以IGBT 全控功率元件143652VT VT VT VT VT VT 、、、、、构成A 、B 、C 三相桥臂,为简化图形,与各开关元件并联的续流二极管未画出,三相电阻负载‘Y ’接。
经典的SVPWM理论及Simulink 仿真搭建1 SVPWM 技术原理1.1 SVPWM 调制技术原理空间矢量脉宽调制SVPWM(Space Vector Pulse Width Modulation),实际上是对应于交流感应电机或永磁同步电机中的三相电压源逆变器功率器件的一种特殊的开关触发顺序和脉宽大小的组合,这种开关触发顺序和组合将在定子线圈中产生三相互差120°电角度、失真较小的正弦波电流波形。
实践和理论证明,与直接的正弦脉宽调制(SPWM)技术相比,SVPWM 的优点主要有: (1) SVPWM 优化谐波程度比较高,消除谐波效果要比SPWM 好,实现容易,并且可以提高电压利用率。
(2) SVPWM 比较适合于数字化控制系统。
目前以微控器为核心的数字化控制系统是发展趋势,所以逆变器中采用SVPWM 应是优先的选择。
对称电压三相正弦相电压的瞬时值可以表示为:a mb mc m cos 2cos()32cos()3u U t u U t u U t ωωπωπ⎧⎪=⎪⎪=-⎨⎪⎪=+⎪⎩器三路逆变桥的组态一共有8种。
对于不同的开关状态组合(abc ),可以得到8个基本电压空间矢量。
各矢量为:22j j dc33out 2()3U U a be ce ππ-=++r(2-25)则相电压V an 、V bn 、V cn ,线电压V ab 、V bc 、V ca 以及out()U abc r的值如下表2-1所示(其中U dc 为直流母线电压)。
ac'b'a'bcU dcABCZ图2.12 三相电压型逆变器原理图表2-1 开关组态与电压的关系a b c V an V bn V cn V ab V bc V ca outU ρ0 0 00 01 0 0 2U dc /3 -U dc /3 -U dc /3 U dc 0-U dcdc 23U0 1 0 -U dc/3 2U dc/3 -U dc/3-U dc U dc02323jdcU eπ1 1 0 U dc/3 U dc/3 -2U dc/30 U dc-U dc323jdcU eπ0 0 1 -U dc/3 -U dc/3 2U dc/3 0-U dc U dc4323jdcU eπ1 0 1 U dc/3 -2U dc/3U dc/3 U dc-U dc5323jdcU eπ0 1 1 -2U dc/3U dc/3 U dc/3-U dc0 U dc23jdcU eπ1 1 1 0 0 0 0 0 0 0可以看出,在8种组合电压空间矢量中,有2个零电压空间矢量,6个非零电压空间矢量。
全数字化SVPWM调速系统的设计与仿真刘刚利【摘要】The implementation scheme to realize vector variable speed system using low -cost embedded system was presented in this paper.The design of the system software, hardware was optimized, and simulation was carried out.Simulation results demonstrated that the performance of space vector variable speed system was excellent, all parts of the theoretical analysis were correct, parameters were set comparatively appropriate, voltage and current output waveforms met the requirements, speed met the beat control requirements, and there was almost no oscillation.The system design is instructive to control production costs and increase commonality, and the system simulation is important to produce the prototype, shorten the design cycle and improve production efficiency.%该文提出了使用价格低廉的嵌入式系统实现矢量变频调速系统的实施方案,对系统软件、硬件设计进行了优化,并实施仿真.仿真表明,设计的空间矢量变频调速系统性能优异,各个部分的理论分析正确,参数配合比较恰当,电压、电流输出波形达到要求,转速符合最少拍控制要求,基本无振荡.系统的设计对控制生产成本、增强通用性具有指导意义,系统的仿真对样机制作、缩短设计周期、提高生产效率具有重要意义.【期刊名称】《中国测试》【年(卷),期】2011(037)001【总页数】5页(P92-96)【关键词】数字化;空间矢量;嵌入式系统;仿真;变频调速【作者】刘刚利【作者单位】成都电子机械高等专科学校,四川,成都,610031【正文语种】中文【中图分类】TM34;TP391.7交流电动机是一个非线性、强耦合、时变的多变量系统,其可控性较差。