电动清扫车电气系统的设计与实现
- 格式:pdf
- 大小:304.87 KB
- 文档页数:5
小型自行式电动扫地车执行机构PCU 控制器设计需求书一、项目概述1.1.自行式电动扫地车基本描述:(1)动力源:锂电池或免维护电池,直流,48V。
兼容 36V。
(2)行走机构:单电机链条传动后轮驱动。
(3)转向机构:前单轮人力转向,无转向助力。
(4)扫刷:可升降,每边 1 组 2 个,总计 4 个,工作时速度恒定;扫刷由直流电机经减速器驱动扫刷,扫刷升降机构由电推杆驱动,电推杆由直流电动机驱动。
(5)滚刷: 1 个,将扫刷扫入的垃圾滚卷、旋抛至垃圾箱,直流电动机经带传动驱动,工作时转速恒定。
滚刷升降机构,一种方式是滚刷与后边刷、集尘器刚性连接,由边刷电推杆驱动升降;一种是与集尘器刚性连接,独立设置电推缸驱动升降。
(6)风机: 1 个,吸尘,直接电动机直接驱动。
(7)振尘机构:采用振动的方式把滤网上吸附的垃圾剥离,掉入垃圾箱,由直流电动机直接驱动偏心振动器。
(8)垃圾箱上下车机构:由 2 个液压缸驱动,液压油由 1 台液压齿轮泵提供,三位四通电磁阀控制液压缸。
液压齿轮泵由电动机直接驱动, 2 台液压缸同步由同步阀和刚性连接共同实现同步控制。
(9)喷淋降尘机构:由 1 台直流电动机驱动离心泵供水喷淋,实现降尘。
1.2.项目实施的目的:项目实施的目的是为自行式电动扫地车控制系统设计提供技术参数要求和设计要求,项目实施不涉及自行式电动扫地车的结构设计及其相关计算。
1.3.项目实施时间要求:本项目要求在 6 月 10 日前完成“自行式电动扫地车电气控制设计需求报告”。
二、电动扫地车执行机构动作描述2.1.行走机构1 台 2.5kW、额定转速 1500r/min 直流无刷电动机的转速、转矩经减速器后(需要计算传动比、行走力矩等滞后,才可确定是否需要减速器),通过链条传动输入驱动桥,经主减速器、差速器、半轴,驱动车体行走。
行走驱动电动机为长时间工作制。
行走机构电动机采用无刷直流电动机,有霍尔速度传感器,需能够方便地实现正反转控制和转速控制。

开题报告摘要作为一种频繁穿梭于城市街道的卫生工具,“道路清扫车”对城市的形象有很大的影响。
因此,一个小的道路清扫车不仅要提高它的性能,而且要有一个符合城市实际需要和城市形象的漂亮的外形。
中国道路清扫车行业经过几十年的发展,产品从单一的纯扫式发展到各种各样的类型,产品的性能和质量迅速增长,特别是在改革开放之后,进口的清扫装置关键部分使得道路清扫车产品性能和可靠性高。
但目前我国道路清扫车的水平仍与发达国家有较大的差距,特别是在产品可靠性方面。
文中介绍了道路清扫车清扫装置的设计说明。
本文介绍了电动道路清扫车的常见问题。
对除尘装置进行了详细设计,介绍了相关设备的原理,并进行了比较分析。
对扫盘、吸嘴、集尘箱、风机及其他设备的选择进行了仔细的比较和分析。
新的电动道路清扫车可以将路面的垃圾和尘土全面的清洁,清扫效率非常高,适合各种气候的干式路面清洁操作,以确保道路清洁操作的安全。
关键词:道路清扫车扫刷扫盘吸嘴集尘箱ABSTRACTAs a sanitary tool that frequently travels through city streets, "path sweeper" has a big impact on the city's image. As a result, a small road sweeper should not only improve its performance, but also have a beautiful look that matches the city's actual needs and the city's image. Road sweeper industry in China after decades of development, the development of products from a single pure sweep type all sorts of types, product quality and performance of rapid growth, especially after the reform and opening up, import a key part of cleaning device makes the road sweeper products performance and high reliability. However, the level of road sweeper in our country is still far from the developed countries, especially in terms of product reliability.This paper introduces the design of the cleaning equipment of road sweeper. This paper introduces the problem of electric road sweeper. The design of the dust removal device is detailed, the principle of related equipment is introduced, and the comparison analysis is carried out. The selection of sweep, mouth, dust box, fan and other equipment was carefully compared and analyzed. New electric road sweeper pavement can be garbage and comprehensive dust cleaning, cleaning efficiency is very high, suitable for all kinds of climate dry surface cleaning operation, to ensure the safety of road cleaning operations.Key words: the path sweeps clear the vehicle the scanning sweeps the plate attracts the mouth the collection dust box目录摘要 (I)ABSTRACT (V)第1章绪论 (1)1.1 道路清扫车的意义和目的 (1)1.1.1 道路清扫车的意义 (1)1.1.2 道路清扫车的目的 (1)1.2 道路清扫汽车的发展与展望 (1)1.2.1 道路清扫汽车的发展历史 (1)1.2.2 道路清扫汽车的现状 (2)1.2.3 道路清扫车的发展与展望 (2)1.3道路清扫车的比较 (2)1.4本设计的主要内容 (3)第2章电动道路清扫车的总体设计 (4)2.1设计思想 (4)2.2整车参数的确定 (4)2.2.1尺寸参数 (4)2.2.2质量参数 (4)2.3总体设计 (5)2.3.1工作原理 (5)2.3.2构造及功能 (5)2.4本章小结 (6)第3章主要零件的设计 (7)3.1集尘箱的设计 (7)3.2扫盘和扫刷的设计 (7)3.3扫盘的布置形式 (8)3.4吸嘴的设计 (9)第4章清扫和吸尘系统的动力选择 (11)4.1清扫系统的动力选择 (11)4.2扫盘的驱动马达选择 (11)4.3 风机的选择 (12)4.4本章小结 (12)第5章清扫车工作原理分析 (13)5.1清扫车清扫过程 (13)5.1.1 扫盘的工作方式 (13)5.1.2 吸尘装置的工作方式 (13)5.1.3 垃圾箱的清理 (13)5.2 本章小结 (13)结论 (14)致谢 (15)参考文献 (16)第1章绪论1.1 道路清扫车的意义和目的1.1.1 道路清扫车的意义随着我国综合国力的不断提升,工业的发展速度迅速,环境的污染也越来越严重,道路的垃圾和尘土也越来越多。

汽车自动清洗机PLC控制系统设计(含全套CAD图纸)编号无锡太湖学院毕业设计(论文)题目:汽车自动清洗机PLC控制系统设计信机系机械工程及自动化专业学号:学生姓名:指导教师:(职称:副教授)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)汽车自动清洗机PLC控制系统设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:年月日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目汽车自动清洗机PLC控制系统设计2、专题二、课题来源及选题依据随着我国汽车保有量的持续增加,汽车清洗作为汽车保养的一个前提工序,就显得越来越重要。
开发汽车自动清洗机对于节约水资源和环境保护,提高劳动生产率具有重要意思。
本课题属工程设计类课题,要求完成汽车自动清洗机的PLC控制系统设计。
通过本设计,可以帮助同学加深对本专业的相关知识理解和提高综合运用专业知识能力。
三、本设计(论文或其他)应达到的要求:①了解汽车自动清洗机的工作原理,国内外的研究发展现状;②熟练掌握有关计算机绘图软件,并绘制有关电路图纸,编制PLC控制程序;③熟练掌握PLC控制系统的知识;④掌握有关工艺流程设计、控制系统主电路、控制电路和电气元件的选型设计。
四、接受任务学生:班姓名五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日随着我国汽车保有量的持续增加,汽车清洗行业也迎来了一个重要的发展机遇。
汽车清洗机是洗车工作必不可少的设备。
开发汽车自动清洗机对于节约水资源和环境保护,提高其工作效率具有重要意义。

基于PLC的小型纯电动清扫车控制系统设计作者:毛华峰海争平杨凡来源:《中小企业管理与科技·上旬刊》2013年第03期摘要:本文以小型纯电动清扫车为研究对象,根据清扫车的结构和工作原理,分析清扫系统的控制需求,基于PLC控制器设计了清扫系统的电路和控制程序,实车测试后表明该控制系统结构简单,操作方便,可靠性高。
关键词:纯电动清扫车控制系统 PLC0 引言汽车尾气排放所引起的空气污染问题和石油危机问题,使得采用绿色能源的电动汽车受到越来越多的人的关注。
人们普遍认为纯电动汽车将是未来汽车工业的发展趋势,但是受到现有电池技术水平的限制,电池能量密度普遍偏低,导致纯电动汽车的续驶里程有限,另外充电设施建设以及安全问题,使得纯电动化在家用乘用车和长途货运领域的发展受到极大的限制。
小型清扫车作为面向住宅区、厂区的清扫专用车,具有区域化工作,里程固定,使用时间短等特点,可以忽略上述限制,非常适合纯电动化。
本文将研究以铅酸电池为能源,电池为驱动系统的小型电动清扫车,设计出操作简单,工作可靠的控制系统。
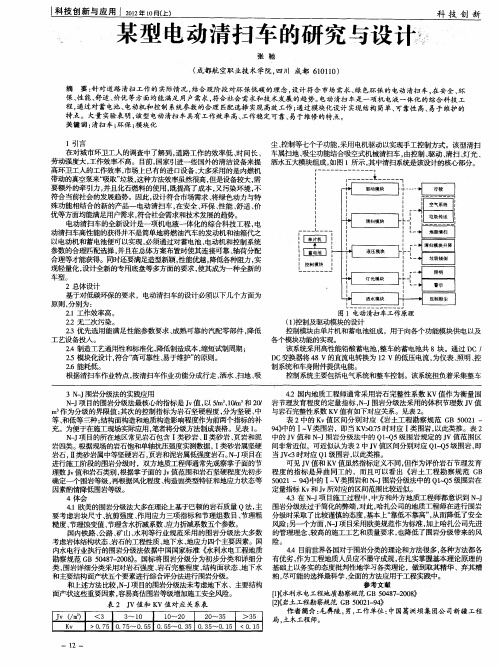
1 电动清扫车结构此小型清扫车为吸扫式结构,为了避免清扫时扫盘引起的二次扬尘污染问题,在扫盘前端加装了洒水喷头,同时为了解决垃圾箱内垃圾尘土与空气分离问题,加装了吸式除尘装置。
该小型纯电动清扫车的总体结构可以分为行驶系统(如图1)和清扫系统(如图2)两部分。
行驶系统部分主要实现车辆的行驶,转向等功能,由车辆底盘、驱动电机、电池组和转向系统等组成。
该车辆底盘为清扫车专用底盘,预留了清扫系统的安装空间,为整个车身提供承载;驱动电机为他励直流电机,后置后驱结构,可满足行驶功率需求;电池组由8块12V铅酸电池组串并联后组成,为行驶系统和清扫系统提供电源。
清扫系统部分主要由扫盘、滚刷、传送带和垃圾收集系统为主要的功能部件。
喷嘴向路面洒水,前边刷将垃圾和尘土向滚刷前部集中,再由滚刷将垃圾尘土扫入垃圾传送带,传送带将垃圾送入垃圾箱内。
小型自行式电动扫地车执行机构PCU控制器设计需求书一、项目概述1.1.自行式电动扫地车基本描述:(1)动力源:锂电池或免维护电池,直流,48V。
兼容36V。
(2)行走机构:单电机链条传动后轮驱动。
(3)转向机构:前单轮人力转向,无转向助力。
(4)扫刷:可升降,每边1组2个,总计4个,工作时速度恒定;扫刷由直流电机经减速器驱动扫刷,扫刷升降机构由电推杆驱动,电推杆由直流电动机驱动。
(5)滚刷:1个,将扫刷扫入的垃圾滚卷、旋抛至垃圾箱,直流电动机经带传动驱动,工作时转速恒定。
滚刷升降机构,一种方式是滚刷与后边刷、集尘器刚性连接,由边刷电推杆驱动升降;一种是与集尘器刚性连接,独立设置电推缸驱动升降。
(6)风机:1个,吸尘,直接电动机直接驱动。
(7)振尘机构:采用振动的方式把滤网上吸附的垃圾剥离,掉入垃圾箱,由直流电动机直接驱动偏心振动器。
(8)垃圾箱上下车机构:由2个液压缸驱动,液压油由1台液压齿轮泵提供,三位四通电磁阀控制液压缸。
液压齿轮泵由电动机直接驱动,2台液压缸同步由同步阀和刚性连接共同实现同步控制。
(9)喷淋降尘机构:由1台直流电动机驱动离心泵供水喷淋,实现降尘。
1.2.项目实施的目的:项目实施的目的是为自行式电动扫地车控制系统设计提供技术参数要求和设计要求,项目实施不涉及自行式电动扫地车的结构设计及其相关计算。
1.3.项目实施时间要求:本项目要求在6月10日前完成“自行式电动扫地车电气控制设计需求报告”。
二、电动扫地车执行机构动作描述2.1.行走机构1台2.5kW、额定转速1500r/min直流无刷电动机的转速、转矩经减速器后(需要计算传动比、行走力矩等滞后,才可确定是否需要减速器),通过链条传动输入驱动桥,经主减速器、差速器、半轴,驱动车体行走。
行走驱动电动机为长时间工作制。
行走机构电动机采用无刷直流电动机,有霍尔速度传感器,需能够方便地实现正反转控制和转速控制。
2.2.转向机构前轮转向。
基于PLC的小型纯电动清扫车控制系统设计本文以小型纯电动清扫车为研究对象,根据清扫车的结构和工作原理,分析清扫系统的控制需求,基于PLC控制器设计了清扫系统的电路和控制程序,实车测试后表明该控制系统结构简单,操作方便,可靠性高。
标签:纯电动清扫车控制系统PLC0 引言汽车尾气排放所引起的空气污染问题和石油危机问题,使得采用绿色能源的电动汽车受到越来越多的人的关注。
人们普遍认为纯电动汽车将是未来汽车工业的发展趋势,但是受到现有电池技术水平的限制,电池能量密度普遍偏低,导致纯电动汽车的续驶里程有限,另外充电设施建设以及安全问题,使得纯电动化在家用乘用车和长途货运领域的发展受到极大的限制。
小型清扫车作为面向住宅区、厂区的清扫专用车,具有区域化工作,里程固定,使用时间短等特点,可以忽略上述限制,非常适合纯电动化。
本文将研究以铅酸电池为能源,电池为驱动系统的小型电动清扫车,设计出操作简单,工作可靠的控制系统。
1 电动清扫车结构此小型清扫车为吸扫式结构,为了避免清扫时扫盘引起的二次扬尘污染问题,在扫盘前端加装了洒水喷头,同时为了解决垃圾箱内垃圾尘土与空气分离问题,加装了吸式除尘装置。
该小型纯电动清扫车的总体结构可以分为行驶系统(如图1)和清扫系统(如图2)两部分。
行驶系统部分主要实现车辆的行驶,转向等功能,由车辆底盘、驱动电机、电池组和转向系统等组成。
该车辆底盘为清扫车专用底盘,预留了清扫系统的安装空间,为整个车身提供承载;驱动电机为他励直流电机,后置后驱结构,可满足行驶功率需求;电池组由8块12V铅酸电池组串并联后组成,为行驶系统和清扫系统提供电源。
清扫系统部分主要由扫盘、滚刷、传送带和垃圾收集系统为主要的功能部件。
喷嘴向路面洒水,前边刷将垃圾和尘土向滚刷前部集中,再由滚刷将垃圾尘土扫入垃圾传送带,传送带将垃圾送入垃圾箱内。
风机吸入路面上的垃圾尘土,经除尘设备滤尘,使垃圾尘土与流动气流分离,最后将干净空气排出。
作业模式根据扫盘及吸盘⾃由组合作业,总共分为全洗左洗扫、右洗扫、全清洗、左清洗、右清洗、全⼲扫、右⼲扫及单独吸尘作业10种作业模式。
本系统采⽤总线触摸屏设计,按下主界⾯模式触摸按键,显⽰屏⾃动翻⻚到模式选择界⾯,选择对应的模式,按下确认按控制器⾃动根据选择的模式切换扫盘、吸盘等作业机同时控制器会记忆当前作业模式,断电重新上电后⾃动进⼊上次选择的模式,⽅便环卫作业⼈员操作,作业模式选择如图4、图5所⽰。
⻋载控制器总共由三路CAN 总线通讯接口,CAN 总线波特率为250 K ,为保证通讯质量稳定可靠,对上装通讯系统进⾏合理分配: CAN1负责和上装电机控制器及上装IO 模块进⾏通讯,保证洗扫作业功能稳定可靠;CAN2负责和纯电动底盘通讯,保证上装和底盘⾼压上电及下电图 纯电动洗扫⻋控制系统拓扑图
图 上装⾼压上电流程图
图 电⽓控制系统主界⾯
图 作业模式选择界⾯作业流程控制
作业模式选择完成后,控制器根据选择的作业模式,
. All Rights Reserved.
图 作业控制流程图
. ⻋辆状态监控及远程传输功能
⻋辆状态监测主要包括通讯状态、IO输⼊状态、输出状态、电机状态、底盘状态的监控。
电⽓控制系统与底盘、
IO模块、电机控制器分别制定对应功能的通讯协议,并且。
纯电动隧道清洗车电气系统设计分析摘要:目前城轨工程车主要采用内燃机作为动力源,而内燃机在使用过程中会产生大量废气及噪声,严重影响作业人员的健康。
采用蓄电池作为车辆动力源,具有零排放、低噪音的特点,正在逐渐受到青睐。
文中主要从整车用电负荷、电池选型、电气系统架构、设备布局等方面分析了采用蓄电池作为隧道清洗车动力源的方案及可行性。
关键词:隧道清洗车;电池组;电气系统0 引言目前,国内大部分铁路及城市轨道交通工程机械仍然采用以柴油为主要燃料的内燃机作为动力源。
而内燃机在工作中将会产生大量的废气,这些废气中含有碳氢化合物、氮氧化合物、二氧化硫、一氧化碳以及各种微小颗粒[1]。
隧道作为一个较为封闭的空间,废气很难在短时间内扩散出去。
此外,内燃机发出的噪音也会在隧道内不断反射叠加。
这些都会严重影响施工作业人员的身心健康。
因此,越来越多的城轨工程车开始使用蓄电池作为动力源。
本文根据目前隧道清洗车的作业需求,分析了采用蓄电池作为动力源的隧道清洗车的可行性,并提供了电气系统的设计方案。
1 作业需求隧道清洗车主要用于对地铁隧道内道床、钢轨、钢轨扣件、侧墙壁、排水沟等区域进行高压水冲洗作业。
隧道清洗作业通常在0点至4点的天窗点进行,与机车连挂进行作业,作业速度为3-8km/h。
图1 隧道清洗车2 负荷计算用电负荷的计算关系到电气系统的安全运行,同时也为后续电池组、变流器、断路器、开关等供配电设备的选择提供依据。
隧道清洗车的用电设备主要有水泵组(包含三台水泵及配套的吸水泵)、手持喷枪、空调、照明、辅助设备等,各设备的功率值见表1:表1 功率统计表序设备功率号11#水泵33kW22#水泵18.5kW33#水泵7.5kW4手持喷枪7.5kW5空调3kW10kW6照明等辅助设备用电设备的总功率为:P总=P水泵+P喷枪+P空调+P辅=33+18.5+7.5+7.5+3+10=79.5kW3 电池组选择目前,城轨工程车上常用的蓄电池产品主要有铅酸蓄电池、磷酸铁锂电池、三元锂电池、钛酸锂电池。