横梁电机座法兰-Model
- 格式:pdf
- 大小:22.07 KB
- 文档页数:1

实用标准文档30m/120t架桥机安装、使用、维护说明书河南天路桥梁工程机械有限公司目录一、用户须知 (2)二、公司简介 (3)三、用途介绍及技术参数 (4)四、桥机特点: (5)五、桥机安装: (5)六、桥机过孔: (9)七、桥机架梁 (10)八、维护保养 (12)九、常见故障原因及排除方法 (14)十、质量承诺 (15)十一、售后服务承诺 (16)一、用户须知尊贵的阁下谢谢您对我公司的支持和合作!您购买的架桥机属于国家特种设备。
国家对特种设备的安装、操作使用有严格的规定,请向当地技术监督局详细了解,以便不影响您购买的设备正常安装和使用。
1、收到产品后应严格对照发货清单验收产品及其附件有无损坏。
核对数量是否与清单相符。
技术文件是否完整。
2、应及时与我公司售后服务人员沟通做好安装所需的材料、工具、吊装设备的准备,以便加快安装进度。
3、双方尽快做好技术资料的移交工作。
4、安装前使用方应到当地技术监督局进行安装告知,请注意与检验部门(主检员)的人际关系处理和沟通。
5、架桥机的安装、操作、指挥、吊装等所有人员必须持证上岗并建立完备的操作、维护、保养制度。
6、安装完毕双方自检验收后应及时通知当地有关部门进行检验,检验合格后方可使用。
7、验收后与我公司安装人员办理设备移交手续。
并对我公司安装人员工作表现及安装(设备)质量给予评定。
8、设备在使用过程中如发现质量问题应及时拨打我公司售后服务电话,以便及时提供服务。
9、如需要配件应写明规格型号及收货人详细地址。
二、公司简介河南天路桥梁工程机械有限公司,位于中原大地九朝古都:洛阳市区。
占地45亩、厂房2800平方米,是从事高速公路、轻轨铁路等起重设备制造、桥梁工程施工,技术咨询的一体化实业公司。
公司管理通过了ISO9001国际质量管理体系的认证,产品通过了国家型式试验,取得了国家A级特种设备制造许可证,特种设备安装改造维修许可证。
所有出厂产品和参与工程施工用的设备均经特种设备质量监督检验。
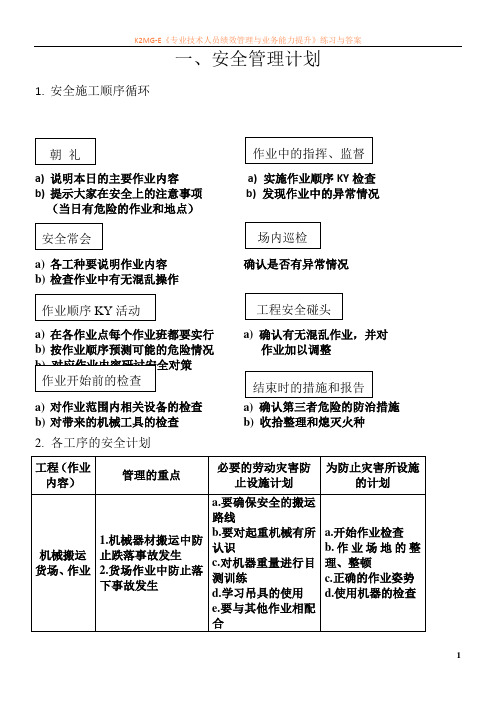
一、安全管理计划1. 安全施工顺序循环a) 说明本日的主要作业内容a) 实施作业顺序KY 检查b)提示大家在安全上的注意事项b) 发现作业中的异常情况 (当日有危险的作业和地点) a) 各工种要说明作业内容 确认是否有异常情况 b) 检查作业中有无混乱操作 a) 在各作业点每个作业班都要实行 a) 确认有无混乱作业,并对 b) 按作业顺序预测可能的危险情况 作业加以调整 a) 对作业范围内相关设备的检查 a) 确认第三者危险的防治措施 b) 对带来的机械工具的检查 b) 收拾整理和熄灭火种2. 各工序的安全计划3.安全栏1)在作业范围的四周必须设置安全栏。
2)安全栏上必须挂有“禁止进入”的标牌。
3)必须实施第三灾害预防对策。
4.高处作业1)进行高处作业,必须使用移动式作业塔和扶梯。
2)必须预先用止动装置把移动式作业塔的脚轮固定好以后,才可以爬上去进行作业。
另外,如果作业塔上已经有人,就不许移动作业塔。
3)在移动式作业塔上进行作业之前,应首先检查栏杆是否确实被紧固件固定好了,随后再进行高处作业。
4)使用扶梯进行高处作业时,应该把扶梯放置在水平的地面上,扶梯打开后,扶梯的止动装置应该切实到位,固定住扶梯。
另外,作业时不要踏到扶梯顶板上。
5)必须使用安全带作业。
※对于作业范围不是地坑的,可以用绳索拦阻,或者周围放置一些圆锥形警示物也可以。
二、安装顺序三、施工准备及相关数据的确认一、在进入现场进行施工之前,需要对施工所需的设备、仪器进行准备与检查1.仪器、安装设备的准备二、安装位置尺寸的确认 1. 确认安装空间确认安装位置尺寸---上部必要尺寸、机械立柱中心距、导轨中心距、入口必要高度等,有与设备相干涉的地方要及时上报。
2..划线、找水平,作框架安装前的准备1) 2)清理现场,对每一区域核对尺寸。
3)以十字坐标基准线,根据地脚埋件图纸,横坐标位置并用墨线标出十字中心线。
柱中心间尺寸允许偏差≤±3mm ,横移导轨内侧尺寸允许偏差≤±3mm 。

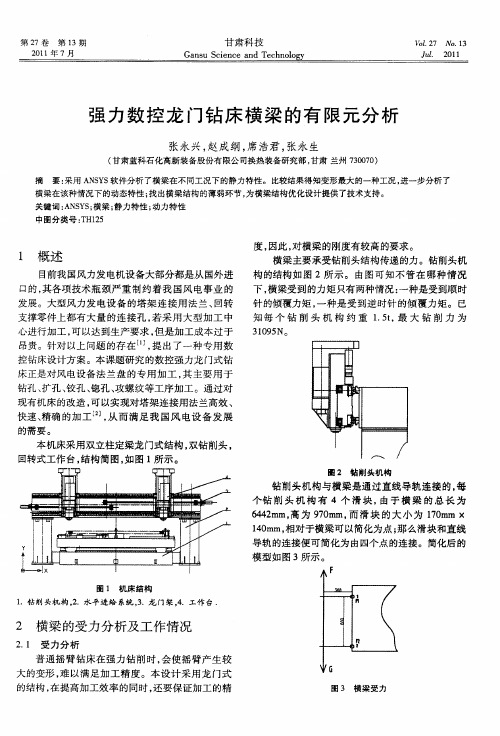
设备管理与维修2021翼1(上)立式车床横梁液压控制改进刘建国,林东(首都航天机械有限公司,北京100076)摘要:数控立车主要用于质量和直径较大的工件加工,横梁是其重要基础部件。
液压系统对横梁夹紧、放松,以及加工过程中的动态稳定性起着至关重要的作用。
通过对横梁液压系统的控制优化,在满足设备运行要求基础上,降低液压油泵损耗和能源消耗。
关键词:数控立车;液压系统;控制优化;降低损耗中图分类号:TG515文献标识码:BDOI :10.16621/ki.issn1001-0599.2021.01.371故障现象CK5116立式车床,使用华中数控系统,操作者进行横梁升降动作后出现报警“横梁夹紧异常—G3014.11”,复位报警不能清除。
2故障判断根据报警信息和梯形图在线诊断发现,由于横梁升降动作未完成产生报警。
通过梯形图控制逻辑,梳理横梁升降动作基本流程:淤滑枕移动到工作台中央;于启动横梁升降;盂横梁微升;榆横梁微升到位后拔销子;虞横梁锁紧油缸放松;愚横梁升/降到指定挡位;舆插销子;余横梁微降;俞微降到位后横梁锁紧油缸夹紧;逾动作完成。
从整个流程看,故障出现在最后阶段步骤俞。
根据报警信息查看梯形图,判断是由于锁紧压力SP6未到,超出设定时间导通G3014.11报警。
检查压力开关,有可能是压力开关损坏或油泵打油压力不够。
查看高压泵压力表没有压力,松开横梁加紧油管也没有油。
可以断定是总压力没有建立,高压油泵出口油管也没有油。
电机油泵正常运转,故障点锁定在高压齿轮泵。
3故障处理脱开齿轮泵与电机,检查电机轴与法兰连接处和键块无损伤,排除电机运行而齿轮泵不运行。
分解过程中发现该齿轮泵体温度极高,齿轮泵连续工作并没有油冷却,高温造成内部磨损。
分析梯形图(图1),发现该高压油泵在设备一开机就开始启动工作,一直到机床关机才停止。
分解齿轮泵后发现内部齿轮磨损严重,更换新齿轮泵安装并试机,机床横梁升降动作正常且无任何报警。

可编辑修改精选全文完整版转向架一. DF7C转向架东风7C型机车转向架属于两系悬挂、外拉杆牵引、轴悬式的无导框三轴转向架。
主要由构架装配、轮对轴箱装置、旁承装置、牵引装置、基础制动装置、砂箱、牵引电动机悬挂装置、手制动装置和轮轨润滑装置等组成。
牵引电动机采用ZQDR410型,齿轮罩底面距轨面高度仅能满足不小于120mm的要求,在这种情况下,当轮径小于1016mm时,该齿轮罩将侵入下部限界[铁辆术石(59)第1410部令规定为103mm],运用中应予以注意。
1.2.构架组成构架是转向架的主体,是安装转向架所有零部件的骨架,也是承载和传递各种力的基体。
因此,构架是一个受力复杂的结构部件。
它由两根侧梁、两根横梁、前后端梁组焊成“目”字形框架,各梁均为Q235A材质的钢板组焊成封闭式箱形结构,强度大、刚性好、重量轻。
在其基础上分别焊有旁承座、拉杆座、外侧弹簧座、牵引拐臂座、电机吊杆座、水平杠杆座、横向止挡、制动座、制动缸座及砂箱座等,组成一个完整的构架。
3.轮对轴箱装置轮对轴箱采用拉杆式定位,具有较小的横向刚度。
包括轮对、轴箱及组件、一系悬挂圆弹簧装置、轴箱拉杆和垂向油压减振器等部件。
轴箱装用552732QT、652732QT和752732QT新型轴箱轴承。
垂向油压减振器设置在1、3、4、6位轮对轴箱的两端。
机车速度表传感器装在5位轮对轴箱两端。
轮对主要由车轴、长毂轮心、短毂轮心、从动齿轮和轮箍等组成。
轮对内侧距为1353mm,轮箍踏面外形采用JM磨耗型踏面,以利于减少轮缘磨耗。
从动齿轮与长毂轮心的热装应在短毂轮心热装之前进行。
它的加热温度不大于180℃,其材质为42CrMo,芯部硬度为HB280~320,齿面硬度为HRC55~60,齿廓硬化层深度为2~4mm。
齿面磨削后应探伤检查。
主动齿轮材质为20CrMnMo,芯部硬度为HRC35~40,齿面硬度HRC60以上,渗碳层深度为1.3~1.9mm。
齿面磨削后应探伤检查。

目录一、编制依据 (1)二、工程概况 (1)三、架桥机主要结构 (2)四、架桥机安装 (5)五、试运行和自检 (13)六、架桥机拆除 (15)七、维护保养 (17)八、注意事项及故障排除 (19)九、安全操作规程 (22)十、防止触电和触电急救措施 (28)十一、安全保证措施 (30)架桥机安装、拆除专项施工方案一、编制依据1、黄延高速公路扩能工程LJ—23合同段桥梁设计图纸2、《起重机设计规范》(GB3811-2008)3、《钢结构设计规范》(GB50017—2003)4、《城市桥梁工程施工与质量验收规范》(CJJ2-2008)5、《公路桥涵设计通用规范》(JTG D60—2004)6、《公路桥涵施工技术规范》(JTG/TF50-2011)7、《钢结构工程施工质量验收规范》(GB50205—2001)8、《城镇道路工程施工与质量验收规范》(CJJ1-2008)9、《建设工程安全生产管理条例》10、《特种设备安全监察条例》11、《建筑起重机械安全监督管理规定》12、《建筑施工特种作业人员管理规定》13、《建筑起重机械备案登记办法》14、架桥机安装使用说明书、合格证、强度校核计算说明书15、国家、省有关安全生产、文明施工有关规程规定。
二、工程概况HD40m/150t型架桥机,主梁采用双梁式空间三角桁架作主梁承力和传力,起吊质量为150t,架桥跨径最大为40m,适应最大纵坡1.5%,适用桥宽不限,该机承担30m箱梁架设是合适、安全的.三、架桥机主要结构1、主要结构该架桥机为了运输方便和现场安装,主结构之间采用销轴和法兰连接,其结构见总装示意图.该架桥机在结构上可以分为主梁、前框架、上横梁、提升小车、前、后支腿、托轮、行走轨道、运梁平车、液压和电气等几部分,构成一个完整的结构体系。
①、主梁主梁为三角桁架式结构,采用型钢和钢板焊接而成。
有结构轻、刚性好、稳定性强、抗风能力大、安装方便、外形美观等优点。
见架桥机主梁结构图架桥机主梁结构图主梁是架桥机的主要承力结件,分为2列,每列全长60米.为了运输方便,每列主梁又分为6节(见总装示意图),通过销轴联接。
钣金件工时定额试行标准(2010-10—26)一、下料1.气割下料3、成品下料半成品按毛坯下料的1.5倍工时计算。
1、室体类室体分半方法:不分半按下表计算。
分两半按下表计算,另加工时:6h/t。
分四半按下表计算,另加工Q58系列:δ5—6板的,主室150h/t,辅室130h/t,δ8辅室110h/t,δ3—4辅室150h/t.Q48系列:需要分半的130h/t,外形同Q37系列的110h/t。
2、提升机罩壳3、分离器壳,卸料罩,分离器料斗.工时(h)=重量(t)*220h/t.重量较小定额不足10h的加10h。
4、螺旋槽按长度计算,10h/米。
5、螺旋轴按长度计算,直径359以下4h/m,直径360以上,6h/m。
Ф500以上的7h/m,Ф700以上的8h/m.6、平台类带花纹板的,系数为1;不带花纹板的,系数为0.8。
槽钢、角钢按每平方规格[80 [100~120 [140~[160 [180~[200[220~[250工时/平方4h 4。
5h 5h 5。
5h 6h注:空格小于等于1200mm*1200mm的每平方减0。
5h。
空格大于1200mm*1200mm的每平方减1h。
铺重型钢板网的平台,按照3h/m2计算网焊接工时,可上下浮动5%。
7、支柱类(1)、单根型钢立柱筋板底座(长+宽)/2≤450 (长+宽)/2>4502h 3h斜筋板底座(长+宽)/2≤450 (长+宽)/2>4503h 4。
5h不带筋板的底座顶板1h斜不带筋板的底座顶板 1.5h(2)、中间有加强板的立柱规格[120以下[140~[160[180~220[250~320工时120分钟/米135分钟/米150分钟/米165分钟/米注:连接板1米之内3件为标准计算,少1件减20分钟总工时= 定额(分钟)*柱长(mm)/(1000*60)+[筋板数/2—柱长(mm)*3/1000]*20分钟/60分钟+底座工时。
连接板0。
25h/件,上下板1h/件,三角筋板0。
多模态运动机构及有限行程下的收口机构设计张震宇;程武山【摘要】为满足某医疗器械产品功能上的要求,使其能实现塑料袋的收口功能,并具有一定的可靠性和实用性,运用多模态运动机构的设计理念设计了一种在有限行程主体框架下的塑料袋收口机构.采用仿真软件对所设计机构进行了合理性及可靠性分析,此设计也可应用于与本研究相似的工程实际问题中,为此类问题提供一个较好的解决思路.【期刊名称】《上海工程技术大学学报》【年(卷),期】2017(031)003【总页数】4页(P215-218)【关键词】多模态运动机构;有限行程;连杆机构;收口设计【作者】张震宇;程武山【作者单位】上海工程技术大学机械工程学院,上海201620;上海工程技术大学机械工程学院,上海201620【正文语种】中文【中图分类】TH112;TH113.2在日常生活中经常需要对一些塑料袋进行收口的处理,例如超市里装蔬菜水果的一次性塑料袋、家里用的垃圾袋等,但在实际中能直接用到的塑料袋收口装置并不常见,国内外已有很多涉及此种问题的解决方案,裴志强等[1-2]的专利均很好地实现了对塑料袋的封口操作,但都没有解决需要人工操作的问题,魏炳方[3]发明设计了一款塑料袋封口装置,能够稳定且可靠地完成塑料袋的封口流程,但装置的机构复杂,操作流程烦琐,Rochman[4]发明了具有封口部位自动调整系统的包装机,能够自动实现对塑料袋的封口操作,但此种机构装置占用空间较大且更适用于流水线生产,不能很好地应用于本文设计背景下具有有限空间的医疗器械产品中.因此,为了解决上述问题并满足作者所从事的某种医疗器械产品上的功能需求,急需一种占用空间小、机械结构简单、制造成本低廉且适合于居家使用的塑料袋收口产品.多模态运动机构设计理念,在机构系统设计里指通过采用多种不同的机构运动方案来搭建一个有机的机构运动整体框,架从而实现相应的功能.本文利用多模态下串并联机构融合设计理念设计了一种新的塑料袋收口方案,这一方案被应用于某大型机械产品的设计中,旨在使产品能较好地实现塑料袋的收口功能.这种解决方案的应用并不局限于此种产品,也能为所有要实现收口功能的机械产品提供一个较好的思路.1.1 提出问题由于产品功能上的要求,需要在不改变产品的原有机构和驱动方式的前提下加装某种机构使得其能够实现塑料袋的收口动作,原有机构是一个并联平行四边形机构,如图1所示.图中的1、2为两个固定在某个确定竖直平面上的固定件,5为一个托板,6、7是固定托板的两个夹片,3和4分别是两个平行直杆,6、7分别又与1、3和2、4组成两个平行四边形机构.图2为原有机构的机构简图.在图2中A、B两点为是由图1中的固定件1、2而抽象出的机架,AD杆为原动件(即图1中的杆件3或杆件4),驱动外力施加在其上使AD杆能绕A点转动,托板EDC为运动的执行件,它能在双边平行四边形机构的驱动下完成上下平移运动.图1和图2所示的机构是本文收口方案设计前的原有机构,如图所示.托板可以随着平行四边形机构的变动而上下作平行移动,托板用来盛放一个载物盆,而平行四边形的变动是受到了施加于左边的杆件上的驱动拉力的作用.本设计的目标是要在已有的主体机构的基础上新设计一个在使用时能够将塑料袋撑开、不使用时将塑料袋口收紧的装置,要求塑料袋的收口具有一定的密封性,并且作为一个产品,需要新设计的机构具有一定的运行可靠性和简易实用性.除此之外,还需要从生产制造的角度和成本控制的角度来考虑所设计机构的零件的易加工性.1.2 问题分析本设计的难点是在不增加新驱动的前提下使所设计的机构完成必要的运动,从而实现塑料袋的收口这一设计目标.因此只能以现有机构的运动能力转化为新设计的机构的驱动力.而现有机构的行程非常有限,平行四边形机构的变动也非常小,因此想要在原始机构上设计增加新的运动机构有一定的难度.产品的原有驱动方式如图3所示,它主要由固定在产品上的横梁及横梁上的丝杠、光轴、主动滑块、从动滑块构成,有一滑块连杆一端与一个从动滑块铰接,另一端与平行四边形机构上的某一连接件相铰接于图中所示P点.丝杠的转动依靠固定在电机座上的电机及带轮传动方式实现,滑块通过运动带动与其相连的连杆运动并带动上述平行四边形机构运动.图3中3和4分别对应图1及图2中的连轩3和连轩4. 由于本文所述的机构设计是在原有的产品的机构框架上进行的,因此在考虑前述设计难点的同时还应考虑新设计的机构不能与原有的机构有任何的干涉情况.以本设计来说,此收口机构的运行范围需限制在长宽高分别为337 mm×210 mm×210 mm的长方体内,此空间限制范围由现有机构框架的内部空间所决定,这对新设计机构的尺寸也提出了较高的要求.2.1 机构的布置收口机构布局如图4所示,收口机构由两组对称布置的串联连杆机构组成,每组连杆机构由连杆1、2和3构成,它们首尾相铰接且连杆2上有一个支点N.图5为收口机构的运动简图,分别选取空间水平向左及竖直向下作为X、Y轴的正方向,如图所示,其中O1、O2为简化的机架,O2C杆为主动件,RF杆为最终的运动输出件,图中规定以顺时针方向角度标注为正.2.2 机构的运行原理当平行四边形机构受到驱动拉力的作用发生变化时,连杆1将受到拉力的作用带动连杆2围绕支点N顺时针转动,连杆2转动的同时连杆3会受到来自连杆2的切向分力的作用,使支撑杆2绕支点R作逆时针转动、从而完成撑开塑料袋的动作.连杆2的作用是将平行四边形机构的运动所带来的有限的行程进行放大,可以更好地驱动收口机构的运动.塑料袋的收口采取使支撑杆2绕支点R转动从而倒下来将塑料袋口压合的方式的原因是从两个方面考虑:一是这种机构比较简单、加工容易,可以较好地实现塑料袋收口的目标;二是因为这种机构可以很好地通过连杆3跟之前被连杆2放大的驱动行程进行贴合.3.1 ADAMS模型导入为了能够直观地分析验证设计机构运行的合理性,借助ADAMS软件进行仿真分析.首先将所需分析的运动模型进行一定的简化,保留主体的驱动原理部分及主要的机构框架,其次将简化后得到的模型进行相应的格式转换并导入ADAMS软件中并对模型中的各运动副进行配置,配置完成后再根据实际情况添加驱动及其他相关配置,完成上述工作后即可对模型进行仿真分析.3.2 仿真分析仿真分析主要用于检验关键铰接点的受力情况及所设计机构整体运行的合理性,首先按滑块实际运行的速度0.02 m/s对仿真的驱动电机进行配置,其次再使机构进行动态运行.从机构动态仿真的结果来看,机构框架的运行姿态符合预期、达到了相关设计的功能要求.接着选取几个重要的铰接点进行受力分析,验证铰链的受力情况是否符合安全性要求进而分析机构整体运行的可靠性.这里选取滑块连杆和平行四边形机构上伸出的固定铰接点(图3中点P)进行示意分析,由于这个铰接点承接着由丝杠滑块传过来的驱动拉力,因而是个重要的受力点,其在X、Y、Z方向上的受力情况如图6所示.从图6中可以看出单个方向上的受力最大不超过17.5 N,合力不超过22.5 N,铰链处选取普通碳钢作为材料,铰接点所受的应力在所使用材料的屈服极限之内并远小于材料的屈服极限,由此可以验证此处铰链的运行是安全可靠的.其他铰接点的可靠性分析均与上述分析类似,此不赘述.3.3 运动分析如图5所示,由分别以复数形式表示并按欧拉公式展开,使方程式的实部和虚部分别对应得到两组方程组从图5中可以得到LNB=112 mm;LBA=120 mm;LND=54 mm;LDA=115 mm;θ=143.5°;LFR=125 mm;LFE=140 mm;LEN=66 mm;LRN=120 mm;β=5.74°.联立方程组(1)和(2)并消去过渡项最终可以得到运动输出杆件FR与水平方向夹角随时间的变化关系,即杆FR的角速度研究得到杆FR的角速度只与连杆O1B的角速度相关,这也侧面验证了所设计机构只具有一个自由度。