第二章 水准测量
- 格式:doc
- 大小:691.50 KB
- 文档页数:17

第2章 水准测量重点提示:介绍了高程测量的常用方法,重点讲述了水准测量的原理、方法,介绍了水准仪的构造,讲述了水准仪的使用、水准测量的实施过程、水准测量的测站校核、路线校核及数据处理、介绍了水准仪的检验和校正方法、简要分析了水准测量误差的来源。
地球表面是高低起伏很不规则的。
要确定地面点的空间位置,除了确定其平面位置外,还要确定其高程。
为了测定地面点高程而进行的测量工作叫做高程测量。
根据测量原理和使用仪器与施测方法的不同,高程测量的方法主要有水准测量、三角高程测量和物理高程测量三种。
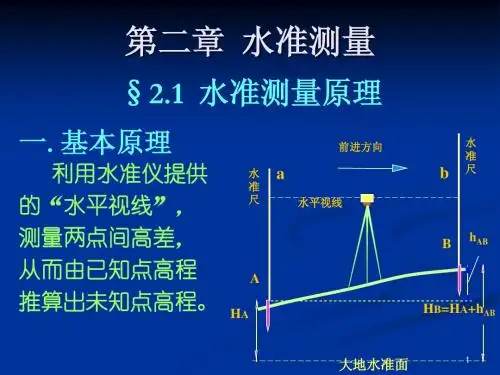
水准测量是利用水准仪提供的水平视线,分别在地面两点垂直竖立的水准标尺上读取读数,推算出两点间的高差,进而求得待定点的高程的方法。
水准测量的精度较高,是精确测定地面点高程的主要方法,但工作量较大且受地形条件限制;三角高程测量是利用仪器在测站点上测定仪器中心至照准点的垂直角,量取测站点仪器高和照准点觇标高,若已知两点间的水平距离,根据三角学原理推算出两点间的高差,进而求得待定点的高程的方法。
三角高程测量的精度低于水准测量,仅作为高程测量的辅助方法,但其作业简单,布设灵活,是一种测定地面点高程的常用方法。
物理高程测量是根据地球的物理性质,利用仪器来确定地面点高程的方法。
物理高程测量主要有两种方法:一种是根据大气气压随地面点高程的不同而变化的规律(即高程愈大,大气压力愈小的原理),用气压计测定出待定点高程的方法。
称为气压测高法;另一种方法是根据重力加速度随地面点高程的不同而变化的规律(即高程愈大,重力加速度愈小的原理),利用重力仪测定两点间重力变化量来确定高差,进而推算出待定点高程的方法,称为重力测高法。
物理高程测量的精度最低,但仪器简单,施测方便,一般仅用于勘查工作,本教材不予介绍。
高程控制主要通过水准测量的方法建立,而在地形起伏大、直接利用水准测量方法较困难的地区建立低精度的高程控制网以及图根高程控制网时,可采用三角高程测量的方法建立。
第二章水准测量单选题1、在水准测量中,若后视点A的读数大,前视点B的读数小,则有(A)。
A.A点比B点低B.A点比B点高C.A点与B点可能同高D.A、B点的高低取决于仪器高度2、水准测量中,同一测站,当后尺读数大于前尺读数时说明后尺点(B)。
A.高于前尺点B.低于前尺点C.高于测站点A.等于前尺点3、水准测量是利用水准仪提供的什么来测定两点间高差的?(A )A.水平视线B.倾斜视线C.横轴D.视准轴4、在水准测量中设A为后视点,B为前视点,并测得后视点读数为 1.124m,前视读数为1.428m,则B点比A点( B )。
A. 高B. 低C. 等高D.无法判断5、水准测量原理是利用水准仪的(A)能提供的一条水平视线。
A. 视准轴B. 水准管轴C. 横轴D. 竖轴6、水准测量中,A,B分别为前、后视点,后视读数为1.235m,前视读数为1.450m,则h BA=( A )。
A.-0.215mB. 0.215mC. 0.140mD. -0.140m7、水准测量中,A,B分别为后、前视点,H A=25.000m,后视读数为1.426m,前视读数为1.150m,则仪器的视线高程为(D)。
A. 24.724mB. 26.150mC. 25.276mD. 26.426m8、水准测量中,设A为后视点,B为前视点,A尺读数为1.213m,B尺读数为1.401m,则AB的高差为(C)m。
A. +0.188B. -2.614C. -0.188D. +2.6149、水准测量中,设A为后视点,B为前视点,A尺读数为1.213m,B尺读数为1.401m,A点高程为21.000m,则视线高程为(B)m。
A. 22.401B. 22.213C. 21.812D. 20.81210、水准测量中,设A为后视点,B为前视点,A尺读数为0.425m,B尺读数为1.401m,已知A点高程为15.000m,则B点高程为(C)m。
A. 15.976B. 16.826C. 14.024D. 13.17411、水准测量中,设后尺A的读数a=2.713m,前尺B的读数为b=1.401m,已知A点高程为15.000m,则视线高程为(B)m。
A.13.688B.16.312C.16.401D.17.71312、已知后视A点高程为Ha ,A尺读数为a,前视点B尺读数为b,则B点高程等于(A )。
A.Ha+a-bB.a-bC.Ha+aD.Ha-b13、在水准测量中A为后视点,B为前视点,后视读数为1.421,前视读数为1.128,则表示B点比A点(A)。
A.高B.低C.一样高D.不能确定14、已知B点高程为241.000m,A、B两点间高差h AB=+1.000m,则A点的高程为(A )。
A.242.000mB.241.000mC.240.000mD.243.000m15、在地面上A、B两点间安置水准仪,在A尺上读数为A,在B尺上的读数为B,则B 点到A点的高差为(B )。
A.A-BB.B-AC.A+BD.A16、视线高程等于(A )+后视点读数。
A.后视点高程B.转点高程C.前视点高程D.仪器高17、测量仪器望远镜视准轴的定义是(C)的连线。
A.物镜光心与目镜光心B.目镜光心与十字丝分划板中心C.物镜光心与十字丝分划板中心D.以上都不是18、水准器的分划值越大,说明(B)。
A.内圆弧的半径大B.其灵敏度低C.气泡整平困难D.整平精度高19、水准仪的(B)应平行于仪器竖轴。
A.视准轴B.圆水准器轴C.十字丝横丝D.管水准器轴20、DS1水准仪的观测精度要(A)DS3水准仪。
A.高于B.接近于C.低于D.等于21、水准仪的(B)轴是过零点的法线。
A.横B.圆水准器C.符合水准D.照准部水准管22、视准轴是连接物镜光心与(C)的连线。
A.目镜光心B.调焦透镜光心C.十字丝分划板中心D.光学对中器光心23、在下列型号的水准仪中,精度最高的是(A)。
A. DS05B. DS1C. DS3D. DS1024、转动物镜对光螺旋的目的是(B)。
A. 看清十字丝B. 使目标成像清晰C. 整平水准管D. 对中25、当水准仪被准精确整平时,理论上视准轴与管水准轴(A)。
A.平行B.垂直C.相切D.无几何关系26、水准仪的脚螺旋的作用是用来(C)。
A.精确整平仪器B.整平长水准管C.整平圆水准器D.既可整平长水准管,又可整平圆水准器27、水准仪整平时,整平圆水准器用的是(B)。
A.微倾螺旋B.脚螺旋C.水平微动螺旋D.水平制动螺旋28、水准测量中,调节圆水准气泡居中的目的是使(A)。
A.竖轴竖直B.视准轴水平C.十字丝横丝水平D.A & B & C29、转动三个脚螺旋使水准仪圆水准气泡居中的目的是(C)。
A.使仪器竖轴处于铅垂位置B.提供一条水平视线C.使仪器竖轴平行于圆水准器轴D.使仪器稳定30、圆水准器轴是圆水准器内壁圆弧零点的(B)。
A.切线B.法线C.垂线D.以上都不是31、转动目镜对光螺旋的目的是(A)。
A.看清十字丝;B.看清远处目标;C.消除视差D.成像清晰32、水准仪安置符合棱镜的目的是(B)A.易于观察气泡的居中情况B.提高管气泡居中的精度C.保护管水准气泡D.便于读数33、水准管上多长的弧长所对的圆心角称为水准管分划值?(A)A.2毫米B.4毫米C.6毫米D.8毫米34、用微倾式水准仪进行水准测量时每次读数之前都要(C )。
A.重新转动脚螺旋整平仪器B.转动脚螺旋使水准管气泡居中C.转动微倾螺旋使水准管气泡居中D.重新调好圆水准器和水准管气泡居中35、产生视差的原因是(B)。
A.观测时眼睛位置不正B.物像与十字丝分划板平面不重合C.前后视距不相等 D 目镜调焦不正确36、普通水准测量,应在水准尺上读取(D)位数。
A. 5B.3C.2D.437、水准测量时,尺垫应放置在(B)。
A.水准点B.转点C.土质松软的水准点上D.需要立尺的所有点38、微倾式光学水准仪中,用来精确整平仪器的是(C)。
A. 圆水准器B. 脚螺旋C. 管水准器D. 光学对中器39、视差产生的原因是(A)。
A.目标成像与十字丝分划板平面不重合B.目标成像与目镜平面不重合C.目标成像与调焦透镜平面不重合D.目标成像与观测者视界面不重合40、水准测量时,在水准点上立水准尺(B)。
A.需放尺垫,尺应立在尺垫上B.不能放尺垫,尺应立在水准点上C.尺垫可放可不放D.有风时需放尺垫41、三等水准测量的观测顺序为(B)。
A.后—前—后—前B.后—前—前—后C.前—后—前—后D.前—前—后—后42、用水准仪进行水准测量的操作步骤为(D )。
A.安置仪器、精平、读数B.安置仪器、粗平、读数C.安置仪器、粗平、瞄准、读数D.安置仪器、粗平、瞄准、精平、读数43、在水准仪上(C)。
A.没有圆水准器B.水准管精度低于圆水准器C.水准管用于精确整平D.每次读数时必须整平圆水准器44、在水准测量中,转点所起的作用是(C)。
A.传递高程B.传递距离C.传递高差D.A和C45、水下地形点的高程测量方法是(C )。
A.用水准测量法B.用三角高程法C.水面高程减去该点水深D.气压高程测量46、在中平测量中,转点的高程等于(D)。
A.视线高程+后视读数B.视线高程+后视点高程C.视线高程-前视点高程D.视线高程-前视读数47、公路中线测量中,设置转点的作用是(A)。
A.传递高程B.传递方向C.加快观测速度D.临时点48、水准测量时,为了消除i角误差对一测站高差值的影响,可将水准仪置在(B)处。
A.靠近前尺B.两尺中间C.靠近后尺D.前尺外面49、水准测量中要求前后视距离相等,其目的是为了消除( A )的误差影响。
A.水准管轴不平行于视准轴B.圆水准轴不平行于仪器竖轴C.十字丝横丝不水平D.视差的影响50、从观察窗中看到符合水准气泡影象错动间距较大时,需( A )使符合水准气泡影象符合。
A.转动微倾螺旋;B.转动微动螺旋;C.转动三个螺旋D.物镜对光螺旋51、消除视差的方法是( C )使十字丝和目标影像清晰。
A.转动物镜对光螺旋B.转动目镜对光螺旋C.反复交替调节目镜及物镜对光螺旋D.转动微动螺旋52、水准仪应满足的几何条件中最主要条件是(B )。
A.圆水准器轴平行竖轴B.视准轴平行水准管轴C.横丝垂直于竖轴D.视准轴垂直水准管轴53、某附合水准测量路线,已知水准点A ,B 高程H A =18.552m ,H B =25.436m 。
实测高差总和为6.870m ,则该水准路线的高差闭合差为( B )mm 。
A. +14B. -14C. +12D. -1254、在水准测量中,要消除i 角误差,可采用( D )的办法。
A.消除视差B.水准尺竖直C.严格精平D.前后视距相等55、水准仪视准轴检验和校正的目的是( C )。
A.使水准管轴水平B.使水准器轴水平C.使水准管轴平行于视准轴D.使水准器轴与竖轴垂直56、高差闭合差的分配原则为( C )成正比例分配。
A.与高程B.与高差的大小C.与距离或测站数D.与测点数57、附和水准路线高差闭合差的计算公式为( C )。
A.始终H H f h -=B.测h fh ∑=C.()始终测H H h f h --∑=D.()终始测H H h f h --∑=58、往返水准路线高差平均值的正负号是以( A )的符号为准。
A.往测高差B.返测高差C.往返测高差的代数和D.往返测高差的代数和的绝对值59、在进行高差闭合差调整时,某一测段按测站数计算每站高差改正数的公式为(C )。
A.i h i L L f V ∑-=B.i h i n n f V ∑=C.i h i n n f V ∑-=D.i h i L Lf V ∑= 60、圆水准器轴与管水准器轴的几何关系为( A )。
A.互相垂直B.互相平行C.相交D.无法判断61、观测值与什么之差为闭合差( A )。
A.理论值B.平均值C.中误差D.改正数62、自动安平水准仪,( D )。
A.既没有圆水准器也没有管水准器B.没有圆水准器C.既有圆水准器也有管水准器D.没有管水准器63、自动安平水准仪的特点上( A )使视线水平。
A.用安平补偿器代替管水准仪B.用安平补偿器代替园水准器C.用安平补偿器和管水准器D.以上都不对64、已知测站点的高程H A =140.00m ,仪器高i=1.50m ,观测某碎部点测得其初算高差h /=-2.50m ,中丝读数V=2.00m ,则碎部点高程等于(D )。
A.146.00mB.141.00mC.139.00mD.137.00m65、水准尺放在龙门板板顶(±0.000)的读数为0.783,现在要测出离基槽底50cm 的水平桩(基槽底高程为-1.50m ),问水准仪在水平桩上应读的读数是(C )。