MASONEILAN定位器手操器说明
- 格式:doc
- 大小:58.50 KB
- 文档页数:2
M aso n eilan*S V I*II A P 定位器作业指导书编制:周利鹏审核:王振辉储运公用成品油班组SVI II AP定位器作业指导书1、工作原理SVI II AP是智能电气定位器,它从控制器接收4-20mA电气位置设定点信号并与阀门位反馈传感器比较位置设定点输入信号。
位置设定点和位置反馈之间的差异通过位置控制算法分析计算输出为I/P转换器设定伺服信号。
I/P的输出压力由驱动执行机构的气动气路放大器放大。
一旦设定点和阀门位反馈之间的误差在范围之内,对伺服信号不进行其它纠正,以保持阀位。
阀门定位器外观如图1-1所示。
1-1 SVI II AP2、电气模块接线端子板如图2-1所示。
2-1 接线端子图3、操作按钮本地按钮都位于铰链保护盖后面,显示窗口的正下方。
用一字螺丝刀将中间的螺丝拧开,将黑色盖子掀起,有三个银色按钮分别是‘*’(选择)、‘-’(向后)、‘+’(向前)如图(3-1)3-1 SVI II AP显示屏及操作按钮三个按钮执行以下功能:左按钮:标记为*,允许您选择或接受当前显示的值或参数选项。
中间按钮:标记为-,允许您通过菜单结构返回上一个菜单项目,或者减少数字显示屏上当前显示的值。
当用于减小显示值时,长按按钮就会使值以更快速度减小。
右键按钮:标记为+,允许您通过菜单结构进入下一个菜单项目,或者增加数字显示屏上当前显示的值。
当用于增加显示值时,长按按钮就会使值以更快速度增加。
4、NORMAL 运行模式和 MANUAL 模式菜单当离开NORMAL模式进入MANUAL模式时,阀门处于它离开NORMAL时所处的最后位置。
在MANUAL模式下,设备不会对4-20 mA的信号作出响应。
但是,SVI II AP设备仍然可以对HART命令作出响应,包括定位阀门的HART命令。
当你从NORMAL运行模式菜单切换到VIEW DATA或VIEW ERR菜单,阀门仍然处于NORMAL 模式,并且仍然对4-20mA信号作出响应。
GSM/GPRS/GPS定位追踪器使用手册序言.非常感谢您购买我们的GPS定位跟踪器。
使用手册将详细的说明如何操作本产品。
因此务必请您在使用产品前认真的阅读本份使用手册。
如有更改,恕不另行通知。
每次更改将统一在最新的一次产品销售中发布。
生产商对于使用手册其中的过失和疏漏不承担法律责任。
目录1 简介---------------------------------------------------------------------------------- 32 应用领域---------------------------------------------------------------------------------- 33 硬件3.1 前面---------------------------------------------------------------------------------------- 33.2 后面----------------------------------------------------------------------------------------- 33.3 侧面--------------------------------------------------------------------------------------- 33.4 底面----------------------------------------------------------------------------------------- 43.5 内部---------------------------------------------------------------------------------------- 44 规格描述------------------------------------------------------------------------------------- 41 简介本产品基于GSM/GPS网络和GPS卫星定位系统,通过短信息或互联系对远程目标进行定位或监控.。
ES-787在可能有爆炸性气体或易燃粉尘的区域中安装 MASONEILAN “SVI-II REMOTE MOUNT ”的特殊说明页码 1/ 61 简介本手册涵盖在潜在爆炸性环境或易燃粉尘区域中操作 SVI-II REMOTE MOUNT 的安全安装、维修和操作要求。
遵守这些要求可确保 SVI-II REMOTE MOUNT 不会引起周围空气点燃。
与过程控制有关的危险不在本手册范围之内。
有关特定阀门/致动器的机械安装说明,请参阅相应安装套件随附的安装说明。
安装不会影响 SVI-II REMOTE MOUNT 在潜在危险环境中使用的适合性。
SVI-II REMOTE MOUNT 的制造厂商:Dresser LLC12970 Normandy Blvd.Jacksonville FL – 32221 – 美国如需语言翻译帮助,请联系当地代表或发送电子邮件至****************************。
Pour la langue de traduction aide, contactez votre repr ésentant local ou envoyez un e-mail ****************************.2 一般要求安装和维护只能由合格人员执行。
区域分类、防护类型、温度类别、气体组和进入防护必须符合标签所示数据。
接线和导线管必须符合管辖安装的所有当地和国家法规。
接线额定值必须比预期的最高环境温度高至少 5ºC 。
接线需要使用经批准的防水防尘密封,并且必须用胶带或螺纹密封剂密封 NPT 接头,以达到最高进入防护等级。
如果防护类型取决于接线格兰头,则针对所需防护类型的格兰头必须经过认证。
金属外壳为压铸合金,主要是铝。
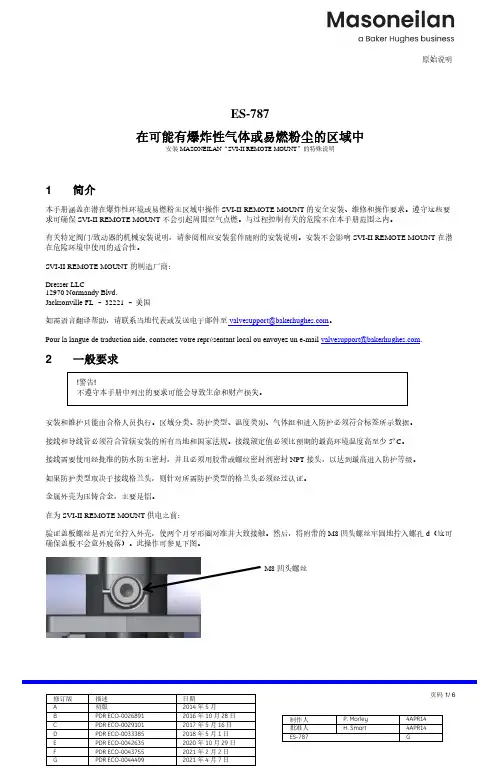
在为 SVI-II REMOTE MOUNT 供电之前:验证盖板螺丝是否完全拧入外壳,使两个月牙形圈对准并大致接触。
然后,将附带的 M8 凹头螺丝牢固地拧入螺孔 d (这可确保盖板不会意外脱落)。

美卓定位器
“C”键代表返回键“+”、“-”键代表上下翻页键“←”代表确认键调试步骤:
“+、-”键同时按进入菜单,显示屏会出现MODE(模式)界面(模式分为手动模式和自动模式,一般不需要更改)。
然后按“+”键显示屏显示PAR(参数),再按“←”进入修改参数,此时屏幕上会显示:
1、PEAF(增益):“C”代表优化(建议使用)、“A”代表最快、超调也最大、“E”代表最慢、超调最小。
然后按“+”键,以此类推到
2、CUTL(小信号切除):一般为2.0%
3、DIR(阀门作用方式):OPE代表气开、CLO代表气关
4、UTYP(阀门形式):ROE代表角行程、LIN代表直行程
5、ATYP(单作用、双作用):1-A代表单作用、2-A代表双作用
6、PFA(故障位置):CLO代表故障关、OPE代表故障开
7、ROT(顺时针、逆时针):CC代表顺关阀、CCC代表逆关阀
8、AO(死区):默认为0,一般不需要更改、如需更改的话改到0.6
改完参数后按“C”键返回,然后按“+”键屏幕显示CAL(校验)再按“←”键进入选择AUTO CAL(自动校验),然后按“←”键阀门自动整定。
修改参数方法:
举例说明:DIR(阀门作用方式)这一级菜单下有OPE(气开)、CLO(气关)两个参数要修改。
就先按“←”键让显示屏DIR这个单词闪烁,然后按“+”键修改想要的参数,修改好后按“←”键让显示屏DIR这个单词不闪烁,即代表参数已修改保存成功。
其它步骤以此类推!
手动设置:
先把模式改成MAN手动模式,然后返回界面后按“+”键到QPOS参数下,按“←”键显示屏闪烁,然后再按“+“、”-“键阀门就可以动作。

ES-699原始说明ES-699在可能有爆炸性气体或易燃粉尘的区域中安装MASONEILANSVI-II AP 的特别说明1 介绍本手册涵盖在潜在爆炸性环境或易燃粉尘区域中操作 SVI-II AP 的安全安装、维修和操作要求。
遵守这些要求可确保 SVI-II AP 不会引起周围空气燃烧。
与过程控制有关的危险不在本手册范围之内。
有关特定阀门的安装说明,请参阅安装套件随附的安装说明。
安装不会影响 SVI-II AP 在潜在危险环境中使用的适合性。
SVI-II AP 的制造厂商:Dresser LLC.12970 Normandy Blvd Jacksonville FL 32221 美国2一般要求安装和维护只能由合格人员执行。
区域分类、防护类型、温度类别、气体组和进入防护必须符合标签所示数据。
接线和导线管必须符合管辖安装的所有当地和国家法规。
接线额定值必须比预期的最高环境温度高至少 5ºC 。
接线需要使用经批准的防水防尘密封,并且必须用胶带或螺纹密封剂密封 NPT 接头,以达到最高进入防护等级。
如果防护类型取决于接线格兰头,则针对所需防护类型的格兰头必须经过认证。
金属外壳为压铸合金,主要是铝。
在为 SVI-II AP 供电之前:1. 验证气动和电子元件盖板螺丝已拧紧。
这对于保持进入防护等级和隔爆外壳的完整性非常重要。
2. 如果安装为本安型,则请检查是否安装了适当的安全栅,并且现场接线符合 IS (本安)安装的当地和国家法规。
切勿在本安系统中安装先前无本安安全栅安装的设备。
3. 在正常工作下,压缩供气从 SVI II AP 排放到周围区域,可能需要采取其他预防措施或进行特殊安装。
4. 如果安装为非易燃型,则检查是否所有电气连接的设备均得到批准,并且接线是否符合当地和国家法规。
5. 验证标签上的标记与应用一致。
6. 验证供气压力不能超过相应标签上的标记。
3SVI-II AP 的型号说明(2)SVI2-abcdefg0 上不提供(3)无数字输出的重传仅在 SVI2-abcdefg0 上提供(4)区域认证包括:CU-TR、Nepsi、CCOE、Inmetro、Kosha、IA4防火和防尘燃要求4.1综述1/2 英寸 NPT 接头必须进入外壳至少整五圈。

原始说明ES-727在可能有爆炸性气体或易燃粉尘的区域中安装MASONEILAN SVI II ESD 的特殊说明目录介绍 (3)定义和缩写 (3)一般要求 (3)SVI-II ESD 的型号说明 (4)防火和防尘燃要求 (4)本安要求 (4)防火和本安标记说明 (5)8.本安安装注意事项 (8)9维修 (9)10历史记录 (11)附图图 1,*本安安装接线要求 (7)附表表 1:4-20mA 输入实体/NIFW 参数8表 2:4-20mA 输出实体/NIFW 参数9表 3:PV 1-5VDC 实体/NIFW 参数9表 4:SW 1 和 SW 2 实体/NIFW 参数9表 5:DI 实体/NIFW 参数9表 6:24 VDC 输入实体/NIFW 参数9介绍本手册涵盖在潜在爆炸性环境或易燃粉尘区域中操作 SVI II ESD 的安全安装、维修和操作要求。
遵守这些要求可确保 SVI II ESD 不会引起周围空气点燃。
与过程控制有关的危险不在本手册范围之内。
有关特定阀门的安装说明,请参阅安装套件随附的安装说明。
安装不会影响 SVI II ESD 在潜在危险环境中使用的适合性。
SVI II ESD 的制造厂商:Dresser LLC.12970 Normandy Blvd.Jacksonville FL 32221 –美国定义和缩写缩写全称解释SVI 智能阀门接口用于控制阀门的 Masoneilan 数字仪器ESD 紧急停机ASD 模拟安全需求4-20mA 为设备供电并启动安全功能DSD 离散安全需求24VDC 为设备供电并启动安全功能A/DSD 模拟/离散安全需求4-20mA 为设备供电,24VDC 启动安全功能一般要求!警告!不遵守本手册中列出的要求可能会导致生命和财产损失。
安装和维护只能由合格人员执行。
区域分类、防护类型、温度类别、气体组和进入防护必须符合标签所示数据。
接线和导线管必须符合管辖安装的所有当地和国家法规。
梅索尼兰SVI® II AP智能定位器操作说明书美国德莱赛公司2006年5月英文版德莱赛机械(苏州)有限公司2006年12月中文版1 of 43图1 SVI II AP遵守本国或当地的有关电器安装的规范遵守本国或当地有关防爆区域操作的规范在对该装置进行操作前,要确定该装置未供电或确认其能够在危险区域内将定位器的盖图4 单作用式定位器气体接口图5双作用式定位器气体接口连接气源在安装完定位器的气管后,按以下步骤连接气源:1:连接气源到过滤减压器上。
2:打开气源。
3:调整过滤减压器。
4:供气压力必须大于阀门驱动器弹簧的最大压力上限5-10psi。
但不能大于阀门驱动器的额定压力。
参看定位器和驱动器的使用手册。
SVI II AP 的接线为了读SVI II AP 定位器的内部参数,必须连接一个HART调制解调器到定位器。
下面图7 在本质安全区域的安装SVI II AP 的维护SVI II AP是基以模块化理念设计的。
它上面的组件能够很容易、快速的进行更换。
对于SVI II AP的维护我们推荐以下操作步骤进行:1:拆卸和安装端盖。
2:拆卸和安装I/P转换器。
3:拆卸和安装气动继电器。
4:升级显示屏。
图8 气动转换器的盖子和显示屏的盖子安装SVI II AP 显示屏的盖子注意:在更换完毕盖子后一定将定位器的电源打开更换的显示屏端盖连接了一根系索来防止导线被拉伸损坏,安装时要将系索安装到定位对于使用pilot阀芯组件的阀门进行校准需要用到Manual Stop校准操作(参看SVI II AP每个本质安全电路必须包含一个接地保护或在独立接地金属导线上运行。
本质安全系统安装注意事项1)危险区域参考设备名牌上有关安装环境的技术要求。
2)现场接线本质安全系统使用的导线必须是接地的屏蔽线,或者使用金属导线做保护。
在危险区域内使用的导线必须能够承受交流500V R.M.S对地电压的一分钟测试。
安装时一定要遵守安装使用手册中内容进行。
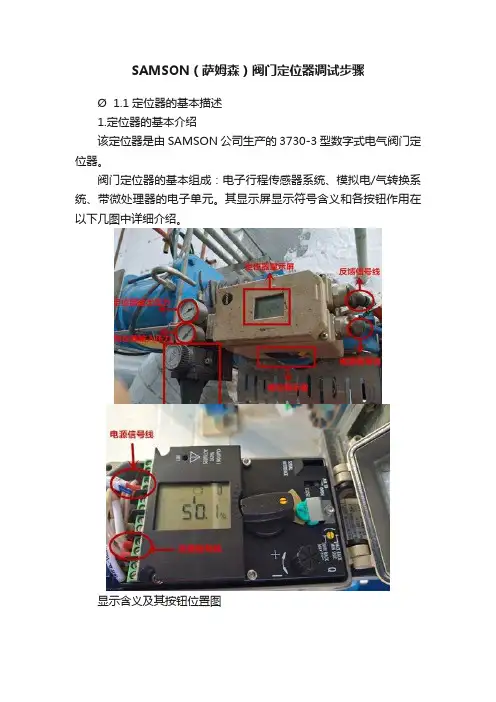
SAMSON(萨姆森)阀门定位器调试步骤Ø 1.1定位器的基本描述1.定位器的基本介绍该定位器是由SAMSON公司生产的 3730-3型数字式电气阀门定位器。
阀门定位器的基本组成:电子行程传感器系统、模拟电/气转换系统、带微处理器的电子单元。
其显示屏显示符号含义和各按钮作用在以下几图中详细介绍。
显示含义及其按钮位置图Ø 1.2调试前准备工作1.准备工具:十字螺丝刀(1×100mm)、一字螺丝刀(3×100mm)、活动扳手(8寸)、活动扳手寸(10寸)、万用表、对讲机等。
2.检查定位器,电磁阀,反馈开关接线。
3.检查阀门供气压力并对过滤减压阀排污。
Ø 1.3阀门定位器的菜单介绍及自整定1.菜单“0”项为操作模式,共有四项注意:若要选择相应的菜单项,先用黑色旋钮旋转至相应的菜单选项,比如“0”选项,按下黑色旋钮,当“0”闪烁时,再旋转黑色旋钮旋转至相应选项,比如“MAN”项,再次按下黑色旋钮确定,完成操作,此方法以下均适用。
MAN为手动操作模式AUTO为自动操作模式SAFE为故障-安全位置ESC为取消在此我们选择AUTO(自动模式)2.菜单“1”项为手动给定阀门行程,此菜单项只有将“0”项菜单选择为MAN(手动模式)时才会出现,此时可转动旋转按钮手动给定阀门行程。
3.菜单“2”项可调整显示方向,即将显示器的可视方向调整180°4.菜单“3”项为确认允许组态,有三个菜单选项NO、YES、ESC 通过旋转按键选择“YES”对定位器进行组态5.菜单“4”项为连接销钉位置,此处根据现场阀门选择90°,即角行程执行机构。
注意:操作此项时,必须将“3”项选为YES6.菜单“5”项为额定范围,此项我们不做调整。
注意:操作此项时,必须将“3”项选为YES7.菜单“6”项为初始化模式,共有六项:MAX:控制阀的最大范围,从气动执行器的关闭至另一方向停止点(即控制阀从全关到全开)阀内件的行程/转角NOM:控制阀的工作范围,从关闭位置到指示的开位置阀内件的行程/转角MAN:手动选择范围SUB:在线替换校验(紧急模式)ZP: 零点校验ESC :取消在此我们选择“MAX”,按下初始化按钮,阀门开始自整定。

浅谈HART475手操器在现场的使用随着工业自动化的进步,现场仪表传输信号也从气动信号逐渐演变为电压信号、标准电流信号,至今数字通讯仍不断完善。
在石油化工企业自动化仪表的使用中,更多时候需要进行仪表本身的参数设置,于是HART475这种简单便携易于操作的手操器完美解决了现场数据收集和控制功能。
本文通过现场实际应用经验,阐述HART475手操器在现场仪表的使用。
标签:HART;HART475;手操器;通讯;智能;仪表由于电压信号不稳定,在远距离传输时容易受线路中电感、电容、负载等的影响。
而电流信号受回路干扰因素影响较小,能保持稳定地信号传输。
因此4~20mA标准电流信号就作为现场仪表的标准传输信号使用。
这种使用仅能得到与过程变量成正比的电流信号,在过程自动化设备之间信息通信受到了极大的限制。
近年来,智能仪表的使用,使得HART通信协议使用越来越广泛。
本文主要针对现场仪表使用HART475手操器通讯等功能实现进行分析。
乌鲁木齐石化公司化肥厂,近年来使用HART通信协议的仪表有Rosemount 罗斯蒙特,YOKOGAWA横河,Siemens 西门子,Yamatake山武,Honeywell 霍尼韦尔,Fisher费希尔等。
作者在现场仪表维护中针对使用过程出现的问题分析总结。
一、HART通信协议基本知识简介HART(Highway Addressable Remote Transducer),可寻址远程传感器高速通道的开放通信协议,是美国ROSEMOUNT公司于1985年推出的一种用于现场智能仪表和控制室设备之间的通信协议。
经过20多年的发展,HART技术在国外已经十分成熟,并已成为全球智能仪表的工业标准。
在HART協议通信中主要的变量和控制信息由4~20mA传送,在需要的情况下,另外的测量、过程参数、设备组态、校准、诊断信息通过HART协议访问。
二、HART475手操器的特点及连接方式HART475现场通讯器支持超过100 个供应商的1,100 多种HART 和Ff 现场总线设备。

BEFORE USE ....Thank you for choosing M-System. Before use, please check contents of the package you received as outlined below.I f you have any problems or questions with the product, please contact M-System’s Sales Office or representatives.■PACKAGE INCLUDES:Valve positioner (body + base socket) (1)■MODEL NO.Confirm Model No. marking on the product to be exactly what you ordered.■INSTRUCTION MANUALThis manual describes necessary points of caution when you use this product, including installation, connection and basic maintenance procedures.POINTS OF CAUTIONPress vertically the center of the service pin or the reset switch within the maximum strength of 9.8 N. Pressing them in slanted angles or at the edge may lead to unex-pected failures.■POWER INPUT RATING & OPERATIONAL RANGE• Locate the power input rating marked on the product and confirm its operational range as indicated below:AC power: Rating ±10%, 50/60 ±2 Hz, approx. 3VA■GENERAL PRECAUTIONS• Before you remove the unit from its base socket or mount it, turn off the power supply and power to a motor for safety.■ENVIRONMENT• Indoor use.• When heavy dust or metal particles are present in the air, install the unit inside proper housing with sufficient ventilation.• Do not install the unit where it is subjected to continuous vibration. Do not subject the unit to physical impact.• Environmental temperature must be within -5 to +60°C (23 to 140°F) with relative humidity within 30 to 90% RH in order to ensure adequate life span and operation.■WIRING• Do not install cables close to noise sources (relay drive cable, high frequency line, etc.).• Do not bind these cables together with those in which noises are present. Do not install them in the same duct.■AND ....• The unit is designed to function as soon as power is sup-plied, however, a warm up for 10 minutes is required for satisfying complete performance described in the data sheet.• For detailed specifications of the network, refer to Ech-elon’s L ON W ORKS FTT-10A Free Topology Transceiver User’s PONENT IDENTIFICATION■HOW TO OPEN THE FRONT COVER:Hang your finger on the hook at the top of the front coverand pull.■FRONT PANEL CONFIGURATIONS1) SERVICE pin: Used to configurate nodes in installation. Transmits network management messages including 48-bit Newron ID.2) RESET switch: Resets the Neuron Chip.3) SERVICE LED: Turns on when there is no valid applica-tion codes or when a failure is detected. Blinks in 0.5 Hz when network address information is not yet configured.4) RUN LED: Blinks in 0.5 Hz in normal operations. Blinks in 2 Hz when the lock protection timer is actuated. Blinks in approx. 5 Hz for 3 seconds when Wink message is received.INSTALLATIONDetach the yellow clamps located at the top and bottom ofShape and size of the base socket are slightly different with varioussocket types. ■DIN RAIL MOUNTINGSet the base socket so that its DIN rail adaptor is at the bot-tom. Hang the upper hook at the rear side of base socket on the DIN rail and push in the socket, push down the DI rail adaptor utilizing a minus screwdriver and pull.■WALL MOUNTING Refer to “EXTERNAL D I -MENSIONS.”TERMINAL CONNECTIONSConnect the unit as in the diagram below or refer to the connection diagram on the top of the unit. ■EXTERNAL DIMENSIONS unit: mm (inch)CLAMP• When mounting, no extra space is needed between units.■CONNECTION DIAGRAMNote: Note that when limit switches inserted in motor wiring, the making/breaking may cause stress on the SSRs.NETWORK VARIABLENode Object #0Application Object #1nviRequest SNVT_obj_request{RQ_NORMALRQ_REPORT_MASKRQ_UPDATE_STATUS}•RQ_NORMALFunctions the same as RQ_UPDATE_ STATUS.•RQ_REPORT_MASKSupported status bits are sent from nvoStatus. 1 is set at status bits when they are supported. Otherwise, 0 is set. invalid_id, invalid_request and manual_control are to be sup-ported.•RQ_UPDATE_STATUSStatus bits of a selected Object are sent from nvoStatus.Status bits of Node Object and Appli-cation Object are identical, excluding object_id.invalid_id, invalid_request and manual_control are to be supported. When manual open/close SW is on,1 is set at manual_control, and both nviActPos and nviManActPos are invalid.nviActPos SNVT_lev_percent{0..100%}{163.835%} = INVALID Position setpoint input0 to 100%; 0.1% increments163.835% is set as INVALID data atstartup.As nviManActPos has priority, nviAct-Pos becomes invalid when valid data isset at nviManActPos.Data less than 0% are processed as 0%.Data greater than 100% are processed as100%.Exception: INVALID data (163.835%) stopscontrol.To make data at nviActPos valid, set IN-VALID data at nviManActPos.nviManActPos SNVT_lev_percent{0..100%}{163.835%} = INVALID Forced position setpoint input0 to 100%; 0.1% increments163.835% is set as INVALID data atstartup.As nviManActPos has priority, nviAct-Pos becomes invalid when valid data isset at nviManActPos.Data less than 0% are processed as 0%.Data greater than 100% are processed as100%.Exception: INVALID data (163.835%) stopscontrol.To make data at nviActPos valid, set IN-VALID data at nviManActPos.nvoActPosFb SNVT_lev_percent{-18.2..118.2%}{163.835%} = INVALID Position output-18.2 to 118.2%; 0.1% increments163.835% is set as INVALID data atstartup.Outputs actual position value from sensor0% = close 100% = opennvoMotorLock SNVT_switch{value = 0 / state = 0..1}{value = 0 / state = 0} Motor deadlock alarmvalue is fixed to 0. Use only state.At startup state = 00: normal 1: deadlock alarm1 is set at state when deviation wouldn’tcome into deadband even after motor-driving time exceeds the preset time atnciErrDetectTime. To cancel the alarm,take either of following three steps.1) Turn power input off and then on.2) Issue RESET command with tool.3) A pply position setpoint input value suchthat motor reversely rotates.nvoOpenSig SNVT_switch{value = 0 / state = 0..1}{value = 0 / state = 0} Full-open position signalvalue is fixed to 0. Use only state.At startup state = 00: invalid 1: validSends only when state changes.1 is set at state when nvoActPosFb isgreater than or equal to nciOpenSigPos.Otherwise, 0 is set.nvoCloseSig SNVT_switch{value = 0 / state = 0..1}{value = 0 / state = 0} Full-close position signalValue is fixed to 0. Use only state.At startup state = 00: invalid 1: validSends only when state changes.1 is set at state when nvoActPosFb is lessthan or equal to nciCloseSigPos. Other-wise, 0 is set.nciDelayTime SNVT_time_sec{0..6553.4 sec.}{0 sec.}Delay time to start sending0 to 6553.4 sec.; 0.1 sec. incrementsFactory setting: 0 sec.Period of time from immediately afterstartup during which no network variablesare outputnciSndHrtBt SNVT_time_sec{1..6553.4 sec.}{10}0 = OFF Sending time intervals of nvoActPosFb1 to 6553.4 sec.; 0.1 sec. incrementsFactory setting: 10 sec.0 equals to OFF and the parameterbecomes invalid.0 setting is required in case of usingnciActPosSndDiff as trigger.Intervals of time stamp sending of nvoAct-PosFbnvoActPosFb is not sent when bothnciSndHrtBt and nciActPosSndDiff are 0.Logical AND is applied and sent when bothnciSndHrtBt and nciActPosSndDiff arevalid.nciActPosSndDiff SNVT_lev_percent{0.1..100 %}{0} = OFF Amount of position change to be triggerfor sending nvoActPosFb.0.1 to 100%; 0.1% incrementsFactory set to 0, which equals to OFF,and the parameter is invalid.0 setting is required in case of usingnciSndHrtBt as trigger.nvoActPosFb is sent each time positionvalue changes by the set value.nvoActPosFb is not sent when bothnciSndHrtBt and nciActPosSndDiff are 0.Logical AND is applied and sent when bothnciSndHrtBt and nciActPosSndDiff arevalid.nciErrDetectTime SNVT_time_sec{0..6.5553.4 sec.}{0} = OFF Motor deadlock detecting time0 to 6553.4 sec.; 0.1 sec. incrementsFactory set to 0, which equals to OFF,and the parameter is invalid.Outputs 1 for nvoMotorLock to stop mo-tor driving when deviation wouldn't comeinto deadband even after the motor-drivingtime exceeds the set period of time.Refer to nvoMotorLock.nciOpenSigPos SNVT_lev_percent{0..100 %}{98 %}Threshold to output nvoOpenSig0 to 100%; 0.1% incrementsFactory setting: 98%Refer to nvoOpenSig.nciCloseSigPos SNVT_lev_percent{0..100 %}{2 %}Threshold to output nvoCloseSig0 to 100%; 0.1% incrementsFactory setting: 2%Refer to nvoCloseSig.nciRestartTime SNVT_time_sec{0..6.5553.4 sec.}{1 sec.}Restart limiting timer0 to 6553.4 sec.; 0.1 sec. incrementsFactory setting: 1Period of time after motor deadlock orreverse rotation during which the motorcannot restart to prevent itself from heat-ing up.CHECKING1) Terminal wiring: Check that all cables are correctly con-nected according to the connection diagram.2) Power input voltage: Check voltage across the terminal 7 – 8 with a multimeter.3) Feedback potentiometer: Check that voltage across ter-minals 9 – 11 shows 3.3V and 10 – 11 shows within 0 to3.3V.4) Output: Check voltage across the output terminals. MANUAL OPERATIONEven when there is no input signal from L ON W ORKS, it is possible to force the position to be 0% or 100% using manual operation switches inside the front cover. Manual opera-tion switch has priority over the opening position from L ON-W ORKS, therefore, when the control is intended to be from L ON W ORKS, be sure to turn off the manual operation switch. Also turning both (open and close) switches on, both will become invalid. The status of manual switch can be read from manual_control at nvoStatus (Refer to “NETWORK VARI ABLE” section). Manual operation is not available when service LED is blinking due to an unconfigured net-work address.TERMINATING RESISTORThe network needs to be connected to terminating resistor(s).A terminating resistor comprises of a resistor and two ca-pacitors (Refer to the drawing below).■BUS TOPOLOGYTwo terminating resistors provided at both ends of the bus are necessary.R = 105 Ω ±1% 1/8 W■FREE TOPOLOGYConnect a terminating resistor to an optional part on the network.R = 52.3 Ω ±1% 1/8 WNetworkC1, C2: 100 μF ≥ 50 VRADJUSTMENTS■FULL-CLOSE POSITIONTurn manual close switch on or apply 0% setpoint signal and adjust the 0% position with full-close position adj. Ad-justable within 0 to 25%. (factory setting: 0%)■FULL-OPEN POSITIONTurn manual open switch on or apply 100% setpoint signal and adjust the 100% position with full-open position adj. Adjustable within 75 to 100%. (factory setting: 100%) Check once more full-close position and confirm there is no deviation, if so, adjust repeatedly.After adjustment, be sure to turn off manual switches.■DEADBANDProtect from hunting by increasing the deadband switch value.A model without a brake stops immediately after a devia-tion goes into the deadband range and the control will be recovered when the deviation is out of the deadband range.A model with a brake stops immediately after a deviation goes to 0 regardless of the set value of deadband range by applying the brake. The control will be recovered when the deviation is out of the deadband range.(factory setting: 1.5%)Deadband adjustmentDeadband adj. SW Deadband (%)00.110.320.530.74 1.05 1.56 2.07 3.08 5.098.0 LIGHTNING SURGE PROTECTIONM-System offers a series of lightning surge protector for protection against induced lightning surges. Please contact M-System to choose appropriate models.。
梅索尼兰MASONIELAN-SV-II阀门定位器调校步骤————————————————————————————————作者:————————————————————————————————日期:ﻩ第一种方法:1.在**DEVICE SETUP**(设备设置)菜单模式选择第3项**SETUP WIZARD**(设备向导)选项菜单并进入**AIR ACTIONCONFIGURARTION**菜单。
2.在AIRACTION CONFIGURARTION菜单选择第1项SKIP THISTASK (跳过)进入FINDV ALVE STOPS菜单。
3.在FIND VALVE STOPS菜单下选择第2项RUN AUTOSTOPS作为定位器的全开全关校验,完成后进入AUTO TUNE菜单。
4.在AUTO TUNE菜单下选择第2项RUNAUTO TUNE做定位器PID参数校验,完成后进入RESETTOFACTORY DEFAULT 菜单。
5.在RESETTOFACTORYDEFAULT 菜单下选择第1项SKIPTHIS TASK(跳过)返回初始菜单。
注意:SVIII AP定位器用HART375校验时,HART375必须经过升级后才能使用。
第二种方法:1.将定位器安装到阀门,接上正常的电气信号,连接HART375与定位器,进入NORMAL MODE菜单模式。
2.在NORMALMODE菜单下选择第4项MANUAL MODEMENU(手动模式菜单)并进入。
3.在MANUAL MODE MENU(手动模式菜单)下选择第3项CALIBRATE MENU(校验菜单),并进入。
4.在CALIBRATEMENU(校验菜单)下选择第1项RANGE并进入CHOOSE菜单。
5.在CHOOSE菜单下选择AUTOSTOPS作定位器快开快关校验。
6.完成后返回CALIBRATEMENU(校验菜单),选择第2项TUNING并进入TUNING CHOOSE选项菜单。
定位器一般操作功能在一般操作中,控制器单元使用设定的4-20MA作为定位器输入信号,数字按顺序显示阀的位置,输入信号和执行器压力,间隔1.5秒,按任何键,会进入如图显示的操作模式菜单.操作模式单有3个选项,1)MAN(将阀打到手动模式,进入手动菜单) 2)EXAMINE(进入检测菜单) 3)OPEN(返回到当前显示的位置,压力,和信号大小),使用按键,可从一个选项进入另一个选项,按*键进入菜单内容.组态参数与可用选项,你可以通过下面的描述来了解按键选项,我们建仪你使用菜单结构图,根据描述的结构来了解.之前注释,在校准前必须完成组态,及组态只有当手动模式下才能完成.菜单内容选项描述单或(双) 选择单或双作用执行机构CTL关(或开) 选择PID控制器功能(关或开) ATO(或ATO) 选择气开或气关的执行器选项线性(或EQUAL50,EQUAL30 选择要求阀特性曲线(线性,等50 快开,自定) %,等30%,快开,自定义,自定义要通过电脑连接输入TS(关或开) 显示设定的紧关点,默认0%PL(关或开) 显示设定阀最底限位点,默认0% PU(关或开) 显示设定阀最高限位点,默认100%英语(或法语) 选择显示语言(英语或法语)步骤调试组态,执行以下步骤1在一般操作模式,按任何键,显示OPEN,按+进入MAN菜单内容2按*移至手动模式,(显示POS MAN),此时阀定位在手动模式.3按+两次移至CONFIG选项.4按*把定位器调至组态模式并显示CONFIGURE菜单.5当单或双按要求显示了,按+进入下一个内容,如果不是,按*进行选择.完成后按+进入下一个内容,(双作用不是当前就能实现的)6在CTL ON(OFF),定位器显示OFF,如果显示ON,按*选择OFF,按+进入下一内容.7在ATO(ATC),如果选项显示正确,按+进入下一内容,如果不是,按*选择另一选项,当完成时,按+进入下一内容.8当线性(或其他曲线),如果按要求显示,按+进入下一内容.如果不是,按*选择其他选项,完成后,按+进入下一内容.如果选择”CUSTOM”,自定义曲线必须通过软件程序输入给阀门,不能通过按钮实现输入.9全关的选项允许用户使用定位器组态在提供满压力(或大气压)时,执行器无论给阀信号都接近于关阀的位置.如果TS选项打开,阀会接近阀被迫全关状态,当TS关(开),如果阀位和显示令人满意的,按+进入下一内容,如果不是,按*改变开/关状态并显示值,然后按+或—增加或减小显示值.(当状态由开到关,没有值显示)当数值设好,按*确认并进入下一内容.10定位器允许用户在组态中设定一个最低限位和最高限位,当操作中打开限位,阀的动作不能低于最低位,也不能高于最高位.(注:这些是软件上停止限制,如果定位器由于任何理由故障,包括电源故障或气路故障,定期位器将不能在限位停止,阀将失去安全,此外,阀上的全开全关按钮避开这个限位控制.如果安全地要求使用限停,机械停止将会被用)当PL关(开),状态和显示值恰当的,按+工作入下一个内容,如果没有,按*改变开/关状态和显示值,然后按+或—来增加或减小显示值(当状态从开改变到关,不显示值),当完成时,按*确认并进入下一内容.11当PU关(开),如果状态和显示值恪恰当的,按+进入下一内容.如果不是,按*改变开/关状态和显示值,然后按+或—号来增加发减小显示值(当状态从开改变到关,不显示值)当值完成时,按*确认并进入下一内容.12定位器显示可用英语或法语.如果语言正确,按+进入下一内容,如果不是,按*选择其他的选项,当设定的语言显示,按+进入下一内容.13在→MAN时,按+移至组态的最前面,或按—返回前一内容,按*离开组态菜单,将返回手动菜单.(显示POS MAN)这就完成了组态部分步骤.14接下来按—移至→CAL继续校准,继续下面的四步. 局部校准注:在运行校准功能前确认组态功能你可以通过校准功能确认定位器产品.输入信号的低高值.执行器压力输出低高值.设定最小最大阀位步骤参考到菜单结构在如图中,邦助了解步骤描述用按钮校准定位器,执行以下步骤。
MASONEILAN 定位器说明共2页、第1页MASONEILAN 定位器说明共2页、第2页注:Masoneilan 定位器通上手操器后,打开的是‘正常模式’(NORMAL MODE )主画面,要进入上图第一个画面,必须先进‘手动模式菜单’(MANUAL MODE MENU ),再回退至‘HOME ’,即‘手动模式’(MANUAL MODE )主画面,此画面在调整回讯时有用。
对定位器操作完成后,必须切至‘正常模式’(NORMAL MODE ),否则总控信号不起作用。
回讯不到位调整方法定位器的反馈连接如图1所示:当手操器进入在线‘手动模式’ (MANUALMODE )主画面后,用第3项change pos<->来使阀门100%(选全开则阀门能开多大就开多大)、全关,并在100%、0%阀位时松开‘并紧螺母’,调整‘双头内螺纹螺杆’,使第1项Vavle position 阀位回讯值也为100%和0%,多调几次调好后拧紧‘并紧螺母’。
调完请重新再标定一次。
反馈联杆安装在不同的安装孔会有不同的阀位行程,越往里行程越小,而行程回讯都为100%(可能因为回讯电位器转够一定的角度即100%,阀位不再动作)。
当安装孔动过以后,如果行程不到位,标定是不能把行程标正常的。
回讯与阀位反向调整方法config mune ——setup ——Air to close (气关阀)项目与实际一致的话,用change pos<->把阀门调至全开,再用calibrate mune ——range ——find stops limit 去寻找停止位(输入100%),回讯就会与阀位一致。
注:标定约需10分钟,如果有大的错误如气源没有等,标定会很快终止并提示,如果回讯与阀位反向,标定可能会一直进行下去,标不完,此时要安上面方法调整。
图1:反馈连杆组件图。
定位器调试流程:
1、检查接线及阀门安装情况是否完整;
2、切换到人工模式(Manual);
3、检查并调整好所有的结构参数(CONFIGuration);
4、运行全开、全关点(STOPS)自动搜索.
5、运行自动调整功能(autoTUNE),得到新的动态响应参数;
6、检查是否有错误提示;
7、手动操作看看是否可以正常运行;
8、退出人工状态,回到自动控制状态。
1)、在“POS…"画面改为手动状态,首先按“+"键,找到“MAN ”字样,按“*”键可以进入手动状态,在手动状态时,阀门应显示“MANPOS”字样,这时再按下“*”,就可以进行手动操作阀门。
2)、手动改自动,按“+”键,找到“-OPER”字样,按“*”键,阀门进入自动状态.
3)、在手动状态,再次找到“CAL”菜单下的“TUNE”子菜单,按下“*”键,该定位器自动进行校验,显示“FINISH”时,调试结束。
MASONEILAN 定位器说明
共2页、第1页
MASONEILAN 定位器说明
共2页、第2页
注:Masoneilan 定位器通上手操器后,打开的是‘正常模式’(NORMAL MODE )主画面,要进入上图第一个画面,必须先进‘手动模式菜单’(MANUAL MODE MENU ),再回退至‘HOME ’,即‘手动模式’(MANUAL MODE )主画面,此画面在调整回讯时有用。
对定位器操作完成后,必须切至‘正常模式’(NORMAL MODE ),否则总控信号不起作用。
回讯不到位调整方法
定位器的反馈连接如图1所示:
当手操器进入在线‘手动模式’ (MANUAL
MODE )主画面后,用第3项change pos<->来使
阀门100%(选全开则阀门能开多大就开多大)、全关,并在100%、0%阀位时松开‘并紧螺母’,调整‘双头内螺纹螺杆’,使第1项Vavle position 阀位回讯值也为100%和0%,多调几次调好后拧紧‘并紧螺母’。
调完请重新再标定一次。
反馈联杆安装在不同的安装孔会有不同的阀位行程,越往里行程越小,而行程回讯都为100%(可能因为回讯电位器转够一定的角度即100%,阀位不再动作)。
当安装孔动过以后,如果行程不到位,标定是不能把行程标正常的。
回讯与阀位反向调整方法
config mune ——setup ——Air to close (气关阀)项目与实际一致的话,用change pos<->把阀门
调至全开,再用calibrate mune ——range ——find stops limit 去寻找停止位(输入100%),回讯就会与阀位一致。
注:标定约需10分钟,如果有大的错误如气源没有等,标定会很快终止并提示,如果回讯与阀位反向,标定可能会一直进行下去,标不完,此时要安上面方法调整。
图1:反馈连杆组件图。