北京自考《工程心理学》02-07年试题题型分类汇总
- 格式:docx
- 大小:22.13 KB
- 文档页数:10
第一部分导论Q:1、工程心理学研究为什么要坚持以人为中心的观点?2、模拟法对工程心理学研究有什么重要意义?3、什么是模拟逼真度?{1}以二战为标志的工程心理学历史改变。
(1)工程心理学研究的萌芽期动时研究(Time-and-motion study)F. W. Taylor:时间研究Frank Gilbreth & Lillian Gilbreth:动作研究时间-动作工程师(效率专家)(2)工程心理学的兴起与发展二战前:“以机器为中心”二战后:“以人为中心,使机器适应人”{2}工程心理学的研究方法观察法、模拟研究法、实验发、心理测量与测验法、访谈与问卷调查法、现场研究Q1:二战前对人机关心的研究室以机器为中心,随着科学技术的进步,设备不断更新换代,机器的结构与性能日益复杂,而人的素质提高却有一定的限度。
在这种情形下,要完全通过人员选拔和训练去适应不断发展的高性能机器是不可能的。
因此人们认识到人、机是一个整体,机器的设计必须考虑使用者的能力限度。
高性能的装备,只有当它符合使用者的身心特点时才能充分发挥其作用。
要把机器设计得符合使用者的要求,自然就得对人的身心特点和要求有所了解,特别要对处于人—机—环境系统中的人的行为状态、能力水平、操作可靠性等有充分的认识。
因此,只有研究使机器设计适应人的特点的时候,工程设计才真正与心理学的研究密切结合起来。
所以,工程心理学要坚持以人为中心的观点。
Q2:模拟实验的主要特点是它具有现场研究的真实感,但不受现场条件的限制。
在条件控制上,模拟实验与实验室实验的要求完全相同。
它可以根据研究的需要控制实验条件,可以根据研究者的愿望设置和调整实验变量,参加实验的被试也可根据需要加以选配。
模拟实验是工程心理学研究中使用最广和最有效的方法。
Q3:人机关系模拟实验的逼真度包括设备逼真度,环境逼真度和心理逼真度三个方面。
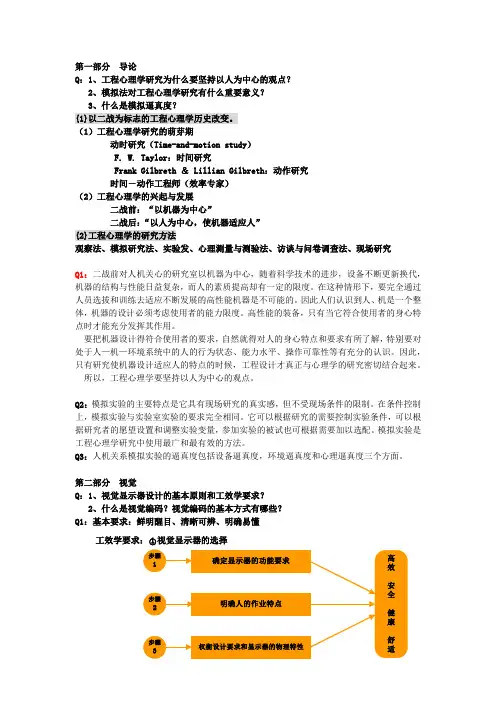
第二部分视觉Q:1、视觉显示器设计的基本原则和工效学要求?2、什么是视觉编码?视觉编码的基本方式有哪些?Q1:基本要求:鲜明醒目、清晰可辨、明确易懂工效学要求:○1视觉显示器的选择○2视觉显示器设计中的人机匹配原则:1、选择最适宜的维度作为传递信息的代码,并将视觉代码的数目限制在人的绝对判别能力的允许范围之内;2、使显示精度与人的视觉辨认能力相适应;3、尽量采用形象直观的显示方式;4、尽量采用与所表示意义有内在联系的显示方式;5、对同时呈现的有关联的信息尽可能采用综合显示;6、目标和背景之间要有适宜的对比关系;7、应有良好的照明性质和适宜的照明水平,避免眩光;8、根据任务的性质和使用条件,确定显示器的尺寸和位置;9、应使同时使用的显示器在信息编码上尽可能互相兼容;10、显示器与相应的控制器在空间关系和运动关系上应相互兼容。
自学考试《心理学》历年真题及参考答案全国2022年04月自学考试心理学一、单项选择题(本大题共20小题,每小题2分,共40分)1.拥有信息并试图进行沟通的人称为(A)9-221A.信息源B.反馈者C.信息D.通道2.感觉阈限与感受性大小的关系是(D)3-45A.韦伯比率B.平行关系C.正比关系D.反比关系3.在平常测验中,选择题考察的是(D)4-81A.识记B.保持C.回忆D.再认4.思维的基本过程是(B)5-107A.分类和比较B.分析和综合C.抽象和概括D.具体化和系统化5.一个实际年龄为4岁,心理年龄为5岁的儿童,其比率智商是(D)6-132A.0.8B.1.25C.80D.1256.“出门看天色,进门看脸色”,这说明了情绪与情感具有(D)7-183A.动力功能B.健康功能C.调控功能D.信号功能7.以弗洛伊德心理分析理论为依据的人格测验是(A)8-207A.罗夏克墨渍测验B.明尼苏达人格测验C.爱德华个人兴趣量表测验D.青年性格问卷测验8.人类个体进行社会交往有着深刻的心理动因,从产生行为动机的心理需要来看,可以分为三个方面,即(A)9-211A.本能、合群需要和自我肯定的需要B.本能、合作需要和自我实现的需要C.本能、合作需要和自我调控的需要D.本能、合群需要和自我保护的需要9.下列属于逃避性心理防御机制的是(C)10-268A.转移B.升华C.压抑D.补偿10.“如果给我一打婴儿,我保证能够任意培养成任何一类的人——或者医生、律师、商人和领导者,甚至于训练成乞丐和盗贼”。
持此言论的心理学家是(C)1-8A.皮亚杰B.劳伦兹C.华生D.弗洛伊德11.研究者在进行实验研究时,必须考虑到三类变量,分别是自变量、因变量和(B)A.反应变量B.控制变量C.环境变量D.不可控制变量12.人耳所能接受的振动频率为(A)3-55A.20~20000赫兹B.30~25000赫兹C.40~20000赫兹D.50~25000赫兹13.信息由感觉记忆进入短时记忆的必要条件是(B)4-83A.编码B.注意C.储存D.复述14.人们在解决问题时,通过增加初始状态与目标状态的差异以最终达到解决问题的目的,这种解决问题的方法是(B)5-116A.启发式B.手段——目的分析法C.爬山法D.算法式15.表示测验结果跨时间的一致性的指标是(A)6-149A.再测信度B.内容效度C.内部一致性信度D.构想效度16.能够激起有机体的定向行为,并能满足某种需要的外部条件或刺激物是(C)7-164A.需要B.动机C.诱因D.兴趣17.安静沉稳、寡言少语、情绪不易外露、自制力强,这类人的气质属于(C)8-192A.胆汁质B.多血质C.粘液质D.抑郁质18.有的人在群情激愤的群体中极易丧失理智,作出与其身份和个性极不相符、与平时判若两人的举动来,这种现象属于(D)9-239A.社会干扰B.社会助长C.群体极化D.去个体化19.“吃不着葡萄说葡萄酸”在心理防御机制中属于(B)10-268A.否认B.文饰C.投射D.反向20.4岁左右儿童的大脑皮层各区的突触密度已经达到顶峰,与成人相比约为(A)11-290A.150%B.120%C.80%D.60%二、名词解释题(本大题共4小题,每小题3分,共12分)21.概念5-109答:概念在心理学上指的是反映客观事物共同特点与本质属性的思维形式,是高级认知活动的基本单元,以一个符号,就是词的形式来表现。
第九章⼈机界⾯设计 1.交互:是指两个或多个相关,但⼜⾃主的实体间进⾏的,⼀系列信息交换的交互作⽤过程。
2.⼈机交互:指⼈与计算机之间,使⽤某种对话语⾔,以⼀定交互⽅式,为完成确定任务的⼈机之间的信息交换过程。
3.⼈机交互系统是实际完成⼈机交互的系统,可以认为,它是由参与交互的各⽅组成的,如包括⼈和计算机双⽅的⼈机交互系统。
4.⼈机交互⽅式即⼈机之间交换信息的组织形式或语⾔⽅式,⼜称对话⽅式、交互技术等。
5.⽤户友好性:指⽤户操作使⽤系统时主观操作的复杂性, 6.计算机启动的交互系统,⼀般具有良好的可学习性和可使⽤性;⽽⽤户启动的交互系统⼀般具有交互能⼒强、灵活性⾼、运⾏速度快等特点。
第⼆节⼈机界⾯的⽤户分析 7.在⼈机界⾯中⽤户的分类: ①偶然型⽤户。
是既没有计算机应⽤领域的专业知识,也缺少计算机系统基本知识的⽤户。
②⽣疏型⽤户。
他们更常使⽤计算机系统,因⽽对计算机的性能及操作使⽤,已经有⼀定程度的理解和经验。
但他们往往对新使⽤的计算机系统缺乏了解,不太熟悉,因此对新系统⽽⾔,他们仍旧是⽣疏⽤户。
③熟练型⽤户。
这类⽤户⼀般是专业技术⼈员,他们对需要计算机完成的⼯作任务有清楚地了解,对计算机系统也有相当多的知识和经验,并且能熟练地操作、使⽤。
④专家型⽤户。
都很精通,通常是计算机专业⽤户。
8.⽤户需求:是⽤户对所购买、使⽤的计算机系统提出的各种要求,它集中反映了⽤户对软件产品的期望。
⽤户需求应该包含功能需求和使⽤需求两⽅⾯。
功能需求:是⽤户要求系统所应具备的性能、功能。
使⽤需求:是⽤户要求系统所应具备的可使⽤性、易使⽤性。
9.⽤户的使⽤需求分析包括哪些?影响⼈的⾏为因素为出发点,来讨论⽤户的使⽤需求。
⑴⽤户对计算机系统的要求。
①系统能让⽤户灵活地使⽤,⽤户不必以严格受限的⽅式使⽤系统。
②系统能区分不同类型的⽤户并适应他们。
③系统的⾏为及其效果对⽤户是透明的。
④⽤户可以通过界⾯预测系统的⾏为。
自考心理学试题及答案详解一、选择题1. 心理学是一门研究什么的学科?A. 人类行为B. 心理过程C. 心理和行为D. 社会现象答案:C2. 下列哪项不是心理学的主要分支?A. 发展心理学B. 认知心理学C. 行为心理学D. 地理心理学答案:D3. 弗洛伊德是哪种心理学理论的创始人?A. 行为主义B. 认知心理学C. 精神分析学D. 人本主义心理学答案:C4. 根据马斯洛的需求层次理论,最基础的需求是什么?A. 安全需求B. 自我实现需求C. 生理需求D. 尊重需求答案:C5. 以下哪个是情绪智力的组成部分?A. 逻辑思维B. 记忆力C. 情绪识别D. 创造力答案:C二、简答题1. 简述心理学研究方法的特点。
答案:心理学研究方法具有多样性,包括实验法、观察法、调查法、案例研究等。
这些方法旨在确保研究的客观性和科学性,同时能够深入探讨心理现象的复杂性。
2. 描述认知失调理论的基本观点。
答案:认知失调理论由费斯汀格提出,认为当个体持有两个或多个相互矛盾的认知(信念、态度或行为)时,会产生一种心理不适感。
个体会试图减少这种不适感,通过改变认知、增加新的认知或否认某些认知。
三、论述题1. 论述人本主义心理学的主要观点及其对现代心理学的影响。
答案:人本主义心理学强调个体的自我实现和个人成长,认为每个人都有实现自己潜能的内在动力。
它主张个体的主观体验和自我认识的重要性,并影响了现代心理学在治疗、教育和组织发展等领域的实践。
四、案例分析题案例:小明是一名高中生,最近在学业和人际关系上遇到了困难,感到焦虑和压力。
问题:请运用心理学知识分析小明可能遇到的问题,并提出相应的建议。
答案:小明可能正经历着学业压力和社交焦虑。
建议小明首先识别压力源,然后通过时间管理和放松技巧来缓解压力。
同时,小明可以寻求心理咨询,以提高自我认识和情绪调节能力。
此外,建立良好的社交支持网络也对缓解焦虑有积极作用。
结束语:本次自考心理学试题及答案详解旨在帮助考生更好地理解和掌握心理学的基本概念、理论和应用。
北京自考《工程心理学》02-07年试题题型分类汇总一、单项选择题★2007年★1、人操作机器后,机器状态发生变化的信息通过反馈回路作用于人,人又根据反馈信息对机器的状态作出进一步控制或调整,这种人机系统是()A 开环人机系统 B 并联人机系统C 串联人机系统 D 闭环人机系统2、在警告信号灯的设计中,我们通常采用下列哪种光源?()A 闪光B 稳定光C 荧光D 自然光3、人机系统按人在系统中的作用分为()A 2类 B 3类C 4类D 5类4、工程心理学研究的中心环节是()A 机器 B 设备 C 人 D 环境5、以电能、化学能等作为动力的人机系统是()A 手控式人机系统 B 机控式人机系统C 自动化人机系统 D 并联式人机系统6、人的信息加工的第一阶段是()A 感觉储存B 知觉 C 记忆与决策 D 执行与反馈7、工程心理学中,在实际情境中研究自变量与因变量关系的方法是()A 模拟实验 B 实验研究C 准实验研究D 相关研究8、接受肌肉收缩长短刺激的运动觉感受器是()A 腱梭B 肌梭C 关节小体 D 神经末梢9、在警戒模式中,目标信号可以在任何时间出现,这种模式是()A 检查模式 B 连续模式C 随意模式 D 自由反应模式10、收音机音量控制旋钮向顺时针方向转动的时候,响度增加,这种现象反映出了显示器和控制器之间的哪种关系?()A 空间兼容性 B 概念兼容性 C 运动兼容性D 控制/显示比例★2006年★1、在下列人机系统中,人的活动与作用主要是体力的,整个系统的效率直接取决于人对机具施力的方式和施力大小的人机系统是()A.手控式人机系统B.机控式人机系统C.自动化人机系统D.并联式人机系统2、飞行员驾驶飞机,这种人机系统是()A.开环人机系统B.闭环人机系统C.串联人机系统D.并联人机系统3、在工程心理学中,以物质形式或观念形式对实际物体,过程和情境的仿真进行研究的方法,我们称之为()A.实验研究B.准实验研究C.相关研究D.模拟研究4、当人的头部和眼球不动时,人眼能觉察到的空间范围,称为()A.视角B.视野C.视力D.视距5、在追踪显示时,靶子和受控元素中有一个是固定的,另一个做相对移动,一般固定靶子作为参照物,它们之间的差异代表误差,这种显示方式是()A.尾随显示B.补偿显示C.滞后显示D.误差显示6、当有若干刺激,但只需对其中的一种刺激做出反应,这种反应时为()A.简单反应时B.选择反应时C.辨别反应时D.潜伏反应时7、在决策时列举一些可能的结果,概率和每项行动的效用。
自考心理学试题及答案一、单项选择题(每题1分,共10分)1. 心理学研究的主要对象是()。
A. 心理过程B. 心理状态C. 心理特征D. 心理现象答案:D2. 以下哪项不属于心理学研究方法?()。
A. 实验法B. 观察法C. 调查法D. 推理法答案:D3. 弗洛伊德的精神分析理论认为,人格结构包括()。
A. 本我、自我、超我B. 意识、潜意识、无意识C. 认知、情感、意志D. 感觉、知觉、思维答案:A4. 以下哪项是认知心理学的主要研究内容?()。
A. 情绪与动机B. 知觉与思维C. 个性与社会行为D. 意识与无意识答案:B5. 根据马斯洛的需求层次理论,最高层次的需求是()。
A. 生理需求B. 安全需求C. 社交需求D. 自我实现需求答案:D6. 下列哪个选项是行为主义心理学的代表人物?()。
A. 弗洛伊德B. 斯金纳C. 荣格D. 阿德勒答案:B7. 心理学中的“自我效能感”概念是由谁提出的?()。
A. 班杜拉B. 弗洛伊德C. 罗杰斯D. 皮亚杰答案:A8. 以下哪个选项是人本主义心理学的核心观点?()。
A. 强调潜意识B. 强调行为的可预测性C. 强调人的自我实现D. 强调环境对人的影响答案:C9. 在心理学研究中,以下哪个术语与“认知失调”理论相关?()。
A. 认知一致性B. 认知冲突C. 认知失调D. 认知平衡答案:C10. 以下哪个选项是社会心理学的研究范畴?()A. 个体心理过程B. 群体心理过程C. 个体与环境的相互作用D. 个体心理特征答案:B二、多项选择题(每题2分,共10分)1. 以下哪些是心理学的主要分支?()。
A. 生物心理学B. 社会心理学C. 教育心理学D. 行为科学答案:ABC2. 以下哪些是心理学研究方法?()。
A. 实验法B. 调查法C. 观察法D. 推理法答案:ABC3. 以下哪些是弗洛伊德的精神分析理论中的概念?()。
A. 本我B. 自我C. 超我D. 自我实现答案:ABC4. 以下哪些是认知心理学的主要研究内容?()。
如何最有效地使用“《心理统计》02年—06年试题题型分类汇总”兵法有云:“知己知彼,百战不殆。
”在我们复习备考中,不仅要了解自己当前的复习情况,也要清楚地知道考题的内容范围、题型特点和设置形式等。
通过研究历年考题,我们可以清晰地把握命题思路,了解书中的知识点是如何被设置成考题的,以便我们在复习备考中有所依据,有所侧重,有的放矢,从而提高复习效率和备考效果,提高自考通过的概率。
为此,我从网上将历年的考题搜集下来并按照题型进行了分类整理汇总,以助自考一臂之力。
在我看来,历年的真题是和教材一样重要的复习备考资料,是手头必备的资料。
以我的经验,我会将考题打印出来,和教材互相参照着看。
在阅读教材的时候,不是被动地接收书面上的信息,而是要积极主动地把书本上的一个个知识点看成是一道道考题。
通过把教材和考题互相参看,使我们能够了解书本上的知识是如何体现在考题上的。
经过一段时间的训练后,你就能很容易形成敏锐的题感,当你看书的时候能够很准确地判断出哪些内容肯定不会考,哪些内容有可能会考,哪些内容会以什么样的题型考,哪些内容的分值重,哪些内容的分值低。
有了敏锐的题感,你看起书来就会有针对性,有侧重点,这样看书就变得更轻松而富有成效。
我们不能为看书而看书,我们看书的最直接目的还是为了考试,因此,我们必须从考试出发,通过研究考题了解考试考什么、怎么考,由此决定我们学什么、怎么学,这才是最优化的应试方略。
当你能够真正运用这种思路和方略去看待和对待考试时,你会发现原来考试不难。
特别声明:在网上搜集资料的初衷是为了自己考试的需要,后来发现和我同是自考生的朋友同样需要这些资料,于是我就对搜集来的资料进行了整理、分类和整合,形成一个整体性的文档。
这些文档基本上涵盖了相应学科的所有网上资料,因此,可以说,有了这些文档在手,你基本上不用再花宝贵的时间和精力去网上找了。
再此,要特别感谢资料的原先提供者,是你们无私的分享使我们的备考变得更有效。
2001年<应用心理学>试卷答案一、单选1.被称这临床心理学之父的心理学家是(B )A 弗洛伊德 B 魏特默 C 荣格D冯特2.行为主义理论所强调的在人类行为中起重要作用的是(D )A 本能B 道德C 良心D学习3.人体在估计事件后果时,总是认为负面后果只会出现在他人身上,自己则不会有事,这种现象叫(B )A 自我防御机制B 理想化偏见C 预防接种D机能反应4.评价中心是(C )A 一个地方B面军一个机构C 一种评价方法D一种评价的量表5.高唤醒水平可以促使运动员获得好成绩的运动比赛项目是(A )A 举重B 高尔夫球C 体操D射击6.有伤害他人的意图,但主要目的是想获得其他好处,如威望、金钱等的攻击行为属于(D )A 敌意攻击B 反应性攻击C 愤怒性攻击D手段性攻击7.一种表现为多少比较持续的担心和不安,是一种一般性的人格特点的焦虑叫(C )A 状态焦虑B 情景焦虑C 特质焦虑D 差应激焦虑8.当儿童出现不良行为时,施予厌恶刺激或剥夺他正在享受的奖励刺激,这种行为矫正模式是(B )A 正强化B惩罚C 负强化D消退9.个人空间的范围(A )A前后大B左右大C前后左右等同D各人都不同10.为解决“环境危机”,环境心理学运用行为改变策略,也就是对行为进行分析,然后干预,属于这种方法的环境保护策略是(B )A先行策略B 随后策略C A 和B都是D A和B都不是二、多选1.法律心理学相对稳定的内容通常包括(ABCD )A 立法心理B 司法心理C犯罪心理D罪犯改造心理2.可以把体育心理学为家分为(ABC )A 临床型的B教育型的C研究型的D学院型的3.环境心理学家的主要学术根源有(ABC )A 心理学B建筑学C环境科学D医学4.锻炼对心理的好处有(ABCD )A 减少焦虑B 减少抑郁C缓解应激D提高自尊5.在进行绩效评估时经常会出现的失误有(ABD )A 极端化B片面化C多元化D趋中化三、填空1.应付应激的三大策略是自我调节(被动地回避应激源)和(寻求专业指导和咨询)2.学校咨询的服务对象可以是学生,也可以是(家长、老师)和学校管理人员。
第一章1工程心理学2人—机系统3感觉器官4效应器官5工程心理学研究的内容是什么?6工程心理学的作用是什么?7人—机相互作用的过程是怎样的?8人和机器相比较,各自有哪些特点?9人—机匹配的原则是什么?10与信息高速公路有关的工程心理学内容有哪些?第二章相关1正相关2负相关3零相关信度4重测信度5复本信度6分半信度效度7构想效度8内容效度9预测效度10实验法11准实验研究12模拟研究13实验法的基本要求和特点是什么?14影响实验效果的干扰因素有哪些?15控制自变量与干扰变量的原则及方法有哪些?16工程心理学中的准实验设计有哪几种?17工程心理学中的心理测量有哪几类?感受性1绝对感受阈限2差别感受阈限4绝对感觉阈限5差别感觉阈限6感觉实验7韦伯定律8隐闭效应10知觉的特性有哪些?11眼球运动的规律是什么?1感觉记忆2操作记忆3信息传递率4反应时5心理不应期6菲茨定律7速度准确性的互换特性8追踪9警戒下降10信息加工模型的阶段及内容是什么?11影响简单反应时的因素有哪些?12单通道理论如何解释不应期?13尾随与补偿追踪的区别是什么?14试述警戒理论。
第五章1群体习惯2视错觉3人为差错4日周节律5人为差错发生的方式有哪些?6人为差错造成的后果是什么?7人为差错的种类有哪些?8人为差错发生的原因是什么?(或背景因素是什么?)9人在一周中的生理心理变化规律是怎样的?10试述PHI周期。
11工作中对人造成压力的原因有哪些?第六章1效用2期望效用3主观期望效用4启发式5满意决策6认识固着7 SRK模型8认识联系体理论9 情景意识10专家系统11决策的特点是什么?12威肯斯模型是怎样的?13启发式在决策中如何运用?14自然决策及其特征是怎样的?15再认启动决策及基本假设是怎样的?16问题解决中的错误产生的原因及处理方法有哪些?第七章1人机界面2显示器3视觉编码4分辨率5显示器装置要注意的原则是什么?6视觉显示器设计的基本要求和原则是什么?7影响荧光显示效率的因素有哪些?8 影响信号灯传递信息的因素是什么?9听觉显示器设计基本要求和原则有哪些?1 控制器2控制器的一般设计要求是什么?3控制器的位置和排列原则是什么?4控制器与显示器的兼容体现在哪些方面?1交互2人机交互3交互启动者4用户有好性5用户概念模型6设计者模型7系统模型8问答式对话9菜单界面10人机界面的基本特性是什么?11人机界面要考虑的人文因素有哪些?12试分析用户的使用需求13开发用户有好系统的设计原理是什么?14人机交互方式的评价标准是什么?15软件开发人机界面设计的内容有哪些?第十章1心理模型2透明系统3软件可用性的标准4 GOMS模型5活动七阶段模型6怎样促进用户形成有效心理模型7 软件设计构成有哪些?8提出软件可用性的原则是什么?9用户支持系统包括哪些机制?10信息数据库中有哪些类型用户需要?第十一章1事故倾向性2 30分钟效应3企业的系统有哪几个子系统构成?4试分析事故原因分析模式(论)5影响事故发生的人的因素有哪些?6导致事故发生的八大因素是什么?7导致人为失误的六个主要原因是什么?8人为因素与事故发生的关系是怎样的?(九条P316-P323)9事故发生与哪几个心理因素有关?10常见的有害心理因素有哪几种?11减少事故发生的方法是什么?12试从系统论角度分析事故的预防(论)(P330)第十二章1工作负荷2体力负荷3心理负荷4应激5主任务分析6工作压力对人的危害有哪些?7噪音对人的危害有哪些?如何控制?8心理负荷评定的方法是什么?9试述心理负荷理论的单资源理论。
北京自考生理心理学真题-2017年2017年4月高等教育自学考试北京市命题考试生理心理学试卷(课程代码10070)本试卷分为两部分,共3页,满分100分;考试时间150分钟。
1.第一部分为选择题,应考者必须在“答题卡"上的"选择题答题区”内按要求填涂,答在试卷上无效。
2.第二部分为非选择题,应考者必须在"答题卡"上的“非选择题答题区"内按照试题题号顺序直接答题,答在试卷上无效。
第一部分选择题(共25分)一、单项选择题(本大题共15小题,每小题1分,共15分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其选出并将“答题卡” 的相应代码涂黑。
错涂、多涂或未涂均无分。
1. 凡是神经细胞间神经信息传递所中介的化学物质,统称为()A. 神经递质B. 受体C. 细胞内信使D. 逆信使2. 虽然脑重量约占全身体重的2%,但其耗氧量和耗能量却占全身的()A. 10%B. 15%C. 20%D. 25%3. 经典神经生理学认为,脑实现功能的主要形式是()A. 映射活动B. 反射活动C. 自发活动D. 诱发活动4. 全色盲失认症患者,主要受损的大脑皮层区是()A. V1B. V2C. V3D. V45.听觉失认症的词聋患者,主要受损的皮层区是()A. 左半球初级听皮层B. 右半球初级听皮层C. 左半球次级听皮层D. 右半球次级听皮层6. 皮层高级知觉通路中,背侧通路的功能是()A. 空间关系和运动知觉B. 物体知觉C. 面孔知觉D. 颜色知觉7. 在注意的三个脑功能网络中,调节注意持久保持的网络是()A. 定向网络B. 执行网络C. 警觉网络D. 三网络共同完成8. 儿童注意缺陷多动障碍(ADHD)的临床分类中,除多动型和混合型外,还有()A. 少动型B. 注意缺陷型C. 警觉型D. 缄默型9. 短潜伏期快速运动技能是经过多次训练学习而得到的,又称()A. 监督式学习B. 知觉学习C. 认知学习D. 模仿学习10. 婴儿只吃母亲的奶,不吃其他人的奶,这是一种()A. 内隐性记忆B. 联想性记忆C. 习惯性记忆D. 情境性记忆11. 顺行性遗忘症受损的脑结构是()A. 额叶皮层B. 顶叶皮层C. 颞叶皮层D. 枕叶皮层12. 语言和思维的脑功能基础是()A. 左脑B. 某一特殊脑结构C. 多层次的D. 大脑皮层网络13. 巴甫洛夫睡眠理论认为,梦是大脑普遍抑制背景上()A. 脑广泛扩散兴奋的结果B. 脑局部兴奋活动的结果C. 脑广泛扩散抑制的结果D. 脑局部抑制活动的结果14. 从海马为起止点的帕帕兹环路所得到的情绪、情感理论称()A. 应激学说B. 激活学说C. 边缘系统学说D. 詹姆士-兰格情绪理论15. 利用磁共振技术发现()A. 男女脑的长距离神经纤维都发达B. 女人脑长距离神经纤维更发达C. 男人脑长距离神经纤维更发达D. 男女人脑的长距离神经纤维都不发达二、多项选择题(本大题共5小题,每小题2分,共10分)在每小题列出的五个备选项中至少有两个是符合题目要求的,请将其选出并将“答题卡”的相应代码涂黑。
自考心理学考试题目及答案一、单项选择题1. 心理学是研究什么的科学?A. 人类行为B. 心理活动及其规律C. 心理疾病的治疗方法D. 动物行为答案:B2. 下列哪项不是心理学的主要分支?A. 发展心理学B. 社会心理学C. 植物心理学D. 认知心理学答案:C3. 心理学中的“观察学习”是由哪位心理学家提出的?A. 弗洛伊德B. 斯金纳C. 班杜拉D. 皮亚杰答案:C4. 自我效能感理论是由哪位心理学家提出的?B. 罗杰斯C. 班杜拉D. 埃里克森答案:C5. 下列哪项不是情绪的基本类型?A. 快乐B. 悲伤C. 愤怒D. 惊讶答案:D二、多项选择题6. 心理学的研究方法包括哪些?A. 实验法B. 调查法C. 观察法D. 个案研究法E. 以上都是答案:E7. 下列哪些属于弗洛伊德的心理分析理论中的概念?A. 本我B. 自我C. 超我D. 潜意识答案:E8. 根据埃里克森的心理社会发展理论,个体在不同的年龄阶段会遇到哪些心理社会危机?A. 信任与不信任B. 自主与羞愧C. 创新与保守D. 勤奋与自卑E. 以上都是答案:E三、简答题9. 简述心理学的主要功能。
答案:心理学的主要功能包括描述、解释、预测和控制行为。
它旨在描述心理现象,解释心理活动的规律,预测个体在特定情境下的行为,并尝试通过干预来控制或改变行为。
10. 描述马斯洛的需求层次理论。
答案:马斯洛的需求层次理论认为,人的需求可以分为五个层次,从低到高依次是生理需求、安全需求、社交需求、尊重需求和自我实现需求。
只有当较低层次的需求得到满足后,个体才会追求更高层次的需求。
四、论述题11. 论述认知行为疗法的基本理念和治疗过程。
答案:认知行为疗法(CBT)是一种心理治疗方法,它认为情绪和行为的问题源于个体的不合理认知。
治疗过程通常包括以下几个步骤:首先,识别和挑战不合理的认知;其次,通过行为实验和认知重构来改变这些认知;然后,通过技能训练和暴露疗法来减少不良行为;最后,通过预防复发策略来巩固治疗效果。
0707-全国-心理学总分:98一、单选题(共19题,共38分)1、人们对初恋时的第一次约会往往记忆犹新,这说明了信息提取的有效性依赖于()(2分) A:与编码信息联系的紧密程度B:情境和状态的依存性C:情绪的作用D:动机的作用2、用科学方法编制了智力测验的第一人是()(2分)A:比内B:推孟C:韦克斯勒D:高尔顿3、新行为主义心理学的代表人物是()(2分)A:华生B:罗杰斯C:冯特D:斯金纳4、研究表明,亲生父母社会经济地位低的儿童,一旦被社会经济地位高的养父母收养,与生活在原来家庭环境中相比,IQ分数会明显地增加,这说明了()(2分)A:家庭环境在一定程度上影响儿童的智力发展B:人的智力发展与遗传没有关系C:一个人的智力发展水平是先天决定的D:学校教育对智力发展的影响5、认识到目标与当前状态之间存在的差异,想出某种办法来减小这个差异的方法是()(2分)A:算法式B:手段—目的分析法C:爬山法D:逆向工作法6、短时记忆的容量有一定的限度,其平均数量为()(2分)A:5B:6C:7D:87、通常人们认为男性是勇敢的、果断的,女性是温柔的、细腻的,这反映了社会知觉的()(2分)A:社会刻板效应B:晕轮效应C:近因效应D:首因效应8、人格特质说理论的代表人物是()(2分)A:马斯洛B:舒茨C:奥尔波特D:弗洛伊德9、因飞行时差所造成的睡眠困难属于()(2分)A:情境性失眠B:假性失眠C:失律性失眠D:药物性失眠10、研究发现,4个月大的婴儿能够区别红、绿、蓝、黄等颜色,而且特别偏好的颜色是()(2分)A:红、蓝B:红、黄C:绿、蓝D:红、绿11、为了研究一个儿童在不同年龄阶段的发展,最合适的方法是()(2分)A:纵向研究法B:横断研究法C:群体序列研究法D:问卷法12、有关从众的研究发现:判断作业的难度较高,所呈现的刺激模糊不清时,个体顺从社会压力的倾向就会()(2分)A:越高B:越低C:不变D:难以确定13、人类四种基本的情绪是()(2分)A:快乐、愤怒、恐惧和悲哀B:快乐、痛苦、恐惧和悲哀C:快乐、痛苦、恐惧和愤怒D:快乐、痛苦、愤怒和悲哀14、“人心不同,各如其面”说明了人格的()(2分)A:独特性B:稳定性C:综合性D:复杂性15、对自己的行为似乎有所意识,但又不太清晰的意识状态是()(2分)A:可控制的意识状态B:自动化的意识状态C:白日梦状态D:睡眠状态16、距离上相近的物体容易被知觉组织在一起,这反映了知觉组织原则的()(2分)A:连续性B:相似性C:接近性D:封闭性17、在群体中,人们有时感到自己被淹没在群体之中,个体的自我认同被群体的行动与目标认同所取代,这种现象叫()(2分)A:社会助长B:社会惰化C:去个体化D:群体极化18、沉思型认知方式的特点是()(2分)A:反应快,精确性强B:反应慢,精确性强C:反应慢,精确性差D:反应快,精确性差19、在意外紧急情况下,人出现肌肉紧张、心率呼吸加快、血压升高等适应性反应,这种情绪状况是()(2分)A:激情B:应激C:心境D:道德感二、文字题(共13题,共60分)20、名词解释:人格(2分)21、名词解释:认知方式(2分)22、名词解释:心理发展的年龄特征(2分)23、名词解释:学习(2分)24、名词解释:挫折(2分)25、简述皮亚杰的认知发展阶段理论。
心理学自学考试题及答案一、选择题(每题2分,共20分)1. 心理学研究的主要内容不包括以下哪一项?A. 认知过程B. 情感过程C. 社会行为D. 物理现象答案:D2. 弗洛伊德的精神分析理论主要关注以下哪个方面?A. 意识层面的心理活动B. 潜意识层面的心理活动C. 社会文化对个体的影响D. 个体的生物本能答案:B3. 根据马斯洛的需求层次理论,最基础的需求是?A. 安全需求B. 社交需求C. 自我实现需求D. 生理需求答案:D4. 认知失调理论是由哪位心理学家提出的?A. 卡尔·罗杰斯B. 亚伯拉罕·马斯洛C. 莱昂·费斯廷格D. 弗洛伊德答案:C5. 情绪智力理论是由哪位心理学家提出的?A. 丹尼尔·戈尔曼B. 阿尔伯特·班杜拉C. 让·皮亚杰D. 弗洛伊德答案:A6. 以下哪项不是学习理论中的强化类型?A. 正强化B. 负强化C. 惩罚D. 忽视答案:D7. 根据艾宾浩斯的遗忘曲线,遗忘的速度是怎样的?A. 先快后慢B. 先慢后快C. 均匀分布D. 先快后慢再快答案:A8. 以下哪项是心理测量学中常用的统计方法?A. 描述性统计B. 推断性统计C. 相关性分析D. 所有选项答案:D9. 心理治疗中的“系统脱敏法”是由哪位心理学家发展出来的?A. 约瑟夫·沃尔普B. 卡尔·罗杰斯C. 弗洛伊德D. 阿尔伯特·艾利斯答案:A10. 以下哪项不是心理发展理论中的阶段?A. 口唇期B. 肛门期C. 潜伏期D. 青春期答案:C二、简答题(每题10分,共40分)1. 简述心理学的主要研究领域。
答案:心理学的主要研究领域包括认知心理学、发展心理学、社会心理学、临床心理学、工业与组织心理学、健康心理学、教育心理学等。
2. 描述弗洛伊德的人格结构理论。
答案:弗洛伊德的人格结构理论包括本我、自我和超我三个部分。
本我代表原始冲动和欲望,自我负责协调本我和现实之间的关系,超我则代表道德和社会规范。
北京自考心理卫生与心理咨询历年试题2002年10月北京高教自考“心理卫生与心理咨询”试题一。
单选题1、主要表现为躯体功能障碍的癔症称为p59()A、转换型B、分离型C、躯体障碍型D、精神障碍型2、社会角色游戏又称p107()A、活动性游戏B、知识性游戏C、创造性游戏D、心理性游戏3、睡眠时产生的惊恐反应,在临床上称之为p128()A、入睡困难B、夜惊C、梦魇D、睡行症4、阳痿、性冷淡属于p242()A、性欲的抑制B、性兴奋抑制C、性高潮抑制D、其他性功能障碍5、只根据个别、片面的细节而不考虑其他情况就对整个事件作出结论属于p294()A、任意的推断B、过分概括化C、选择性概括D、非黑即白的思维6、把自己所不喜欢的或不能接受的性格、态度、动机或欲望,转移到外部世界或他人身上为心理防御机制的p302()A、合理性B、反向形成C、转移D、投射7、心理咨询人员提出自己的情感、思想、经验与来访者分享为p336()A、指导B、解释C、劝告D、自我暴露8、咨询者把来访者主要的言谈、思想、情感等加以综合整理后,以询问的方式反馈给来访者为p330()A、封闭式询问B、释义式询问C、小结式询问D、开放式询问9、一种心理上感到若有所失,没着没落,无所事事又无所适从的感觉为p175()A、失落感B、孤独感C、自卑感D、抑郁感p19510、促使男女青年投入恋爱活动的重要诱因是()A、人际交往B、亲密关系需要C、生理需要D、归属与服从需要二、多选题11、经典的心理健康标准包括p13 ()A、马斯洛自我实现者的模式B、弗洛伊德的心理分析模式C、罗杰斯的机能充分发挥者模式D、奥尔波特的“成熟者”模式12、心理障碍的判别标准包括p29()A、以个人经验作为标准B、社会适应标准C、统计学标准D、症状存在与否标准13、除生理上的某些缺陷引起的自卑外,自卑心理还可以表现为p154 ()A、挫折性自卑心理B、焦虑性自卑心理C、认识性自卑心理D、恐惧性自卑心理14、除共情和尊重外,建立良好咨询关系的技巧还包括p321()A、真诚交流B、积极关注C、自我暴露D、指导劝告15、心理学家们把父母对子女的教养态度分为p282()A、民主型B、严厉型C、权威型D、放纵型16、胎儿在第10周左右已有p73()A、味觉B、压觉C、嗅觉D、触觉17、对婴儿来讲,生活中的大事主要包括p93()A、吃奶B、玩耍C、便溺D、睡觉18、同女性相比,男性性反应的特点是p239()A、性兴奋启动迅速B、性兴奋来得较为缓慢C、性反应持续时间较短D、性反应持续时间较长19、学校恐怖症的原因主要有p263()A、家庭因素B、学校因素C、社会因素D、遗传因素20、除强迫性穷思竭虑外,强迫思维主要还包括p51 ()A、对立性思维B、强迫表象C、强迫性怀疑D、强迫性回忆三、填空题21、现代心理卫生始于1908年的美国,而对现代心理卫生运动兴起做出直接贡献的是美国的比尔斯。
心理学自学考试试题及答案一、选择题(每题2分,共20分)1. 心理学研究的主要对象是什么?A. 行为和心理过程B. 社会现象C. 经济活动D. 物理现象2. 以下哪个是弗洛伊德的心理学理论?A. 行为主义B. 认知主义C. 精神分析D. 人本主义3. 认知失调理论是由哪位心理学家提出的?A. 斯金纳B. 弗洛伊德C. 马斯洛D. 费斯汀格4. 以下哪个选项是学习理论中的强化概念?A. 惩罚B. 消退C. 正强化D. 负强化5. 心理学中的“自我”概念是由哪位心理学家提出的?A. 荣格B. 阿德勒C. 弗洛伊德D. 皮亚杰6. 以下哪个是情绪理论?A. 认知失调理论B. 社会学习理论C. 情绪的维度理论D. 行为主义理论7. 心理学研究方法中的实验法主要关注什么?A. 变量的控制B. 观察的自然性C. 参与者的多样性D. 数据的描述性8. 以下哪个是心理学研究的伦理原则?A. 知情同意B. 利益最大化C. 效率优先D. 个人隐私9. 以下哪个是心理测量学中的信度?A. 测量结果的一致性B. 测量结果的准确性C. 测量结果的稳定性D. 测量结果的可靠性10. 以下哪个是心理治疗中的系统脱敏疗法?A. 认知行为疗法B. 精神分析疗法C. 人本主义疗法D. 行为疗法答案:1-5 A C D C C6-10 C A A A D二、简答题(每题10分,共30分)1. 简述心理学的主要研究领域。
答案:心理学的主要研究领域包括认知心理学、发展心理学、社会心理学、临床心理学、工业与组织心理学、健康心理学、教育心理学等。
2. 描述马斯洛的需求层次理论。
答案:马斯洛的需求层次理论认为人类的需求可以分为五个层次,从低到高依次是生理需求、安全需求、社交需求、尊重需求和自我实现需求。
人们在满足较低层次的需求后,才会追求更高层次的需求。
3. 解释什么是认知失调,并举例说明。
答案:认知失调是指个体在持有两个或多个相互矛盾的信念、态度或行为时所经历的心理不适。
2007年10月北京自考“心理治疗”试题课程代码:05624一.单项选择题1.对心理治疗工作人员培训的主要内容之一是A.相关法律B.资料管理C.会谈技巧D.药物原理2. 以人为中心的治疗重点不涉及A.接纳来访者的倾向和感受B.尊重来访者的个体价值C.注意开发来访者的内部资源D.注意开发来访者的外部资源3.下列防御机制中属于不成熟的防御机制的是A.否认B.投射C.幽默D.退行4.下列关于本我的说法正确的是A.本我遵循现实原则B.本我完全是无意识的C.本我是理性的D.本我是后天习得的5.共情要求治疗师A 能够体验他人的内心世界B 以自己作为主观的参照标准C 放弃自己的内心世界D 冷静观察他人的内心感受6.认识领悟疗法的创始人是A 李心天B 杨德森C 张亚林D 钟友彬7.认知治疗中期的实施治疗阶段,引起认知改变的主要途径有3种,包括信念不能被证实、领悟和A 条件重建B 意义重建C 概念重建D 行为矫正8.在缺乏充分的证据或证据不够客观的情况下,仅凭自己的主观感受就草草得出结论,这种认知错误是A武断的推论B 过度引申C 选择性概括D 个人化9.提出只有神经质症才是森田疗法的真正适应症的是:A 高良武久B 森田正马C 大圆健士郎D 田代信维10.森田疗法中,住院治疗的第三阶段为A 轻工作期B 绝对卧床期C 重工作期D 生活训练期二、多项选择题11心理治疗在新中国的发展经历的阶段包括A 产生阶段B 启动阶段C 发展阶段D 准备阶段E 空白阶段12.即时化的内容包括A 注意过去事件B 注意此时此地C澄清现在的感觉D认识以往的问题E有效认识关系中的问题13.儿童治疗的疗法包括A 游戏疗法B 认知疗法C 关系疗法D 实现疗法E 家庭治疗14.关于移情一下说法正确的是A 移情和来访者的童年经历有关B 移情总是消极的C移情和阻抗无关D 移情分析是心理分析中的核心任务E 移情分析不是心理分析的核心任务15 行为治疗又被称为A 条件反射疗法B 行为矫正疗法C 行动疗法D 矫正疗法E 短程疗法三、填空题16.心理治疗是____________心理学工作的重要组成部分。
北京自考《环境心理学》02-07年试题题型分类汇总一、单项选择题★2007年★1,把“环境心理学”定义为“关注人与环境的相互作用和相互关系的学科”的学者是:A,贝尔 B,费希尔 C,普罗夏斯基 D,霍拉汉2,下列选项中不属于影响工作的主要因素的是:A,噪音 B,照明 C,房间 D,办公桌的大小3,下列选项中不属于暖色的是:A,红色 B,黄色 C,紫色 D,橙色4,下列选项中不属于(作为学习环境的)开放型教室的缺点的是:A,噪音大 B,降低学习积极性 C,无关干扰多 D,私密性得不到保护5,框架优先选择模型的提出者是:A,斯蒂芬和卡普兰 B,斯蒂芬和柏林 C,卡普兰和柏林 D,卡普兰和利顿★2006年★1、自主试选择和控制,决定着行为或心理变化的变量是()A.自变量 B.因变量 C.额外变量 D.控制变量2、有研究发现,在某些情况中,热对人际吸引的影响具有()A.危机效应 B.堤岸效应 C.位置效应 D.分享效应3、一般来说性格内向的个体所需个人空间比外向的个体()A.小 B.大 C.相同 D.无法确定4、个体对所处空间密度的评价是()A.感觉密度 B.内部密度 C.有效密度 D.可知觉密度5、下列座位排列方式中适合于师生交往比较多的是()A.矩形 B.环形 C.马蹄形 D.秧田形★2005年★环境心理学常使用“假装电击”的实验范式来研究BA利他行为 B 攻击行为C人际吸引 D 任务操作开放式办公室最大的缺点是BA 成本高B私密性差C不易沟通 D 不利于互相监督3. 参观时,人们看一个展厅后,通常出门后向右转,到另一个展厅继续参观,这种现象称为CA 习惯化B 博物馆疲劳C 出口偏爱D 定势4. A气味不属于基本气味A 柠檬香B恶臭C花香 D 松脂香5. 听力损伤为暂时阈限改变的患者能够在噪音消除后的D小时内恢复到正常阈限A4 B 8 C 12 D16★2004年★1.环境心理学这一名称最早出现在CA 20世纪初B 20世纪30年代C 20世纪60年代D 20世纪70年代2.周围环境对行为的影响是通过以下那些作为中介变量产生的DA知觉 B 感觉 C 意识 D 情绪3.音色对应的声音的物理参数为BA 频率B 频谱C 振幅D 音高4.一般来说,性格内向的个体所需个人空间比外向的个体BA 小B大 C 相同 D 无法确定5.国内大多数野生动物园中乘车进入动物的放养场地进行参的方式属于动物园的CA 第一代设计B 第二代设计C 第三代设计D 第四代设计★2003年★1.周围环境对行为的影响是通过② 作为中介变量的①拥挤②情绪③噪音④空气污染2.Preiser(1973)归纳了步行街上各种因素带给步行者的影响,并把这些影响因素用③ 来解释①透镜模型②消极情感逃离模型③摩擦─—一致模型④平衡亲密程度模型3.动物园的设计可以分为① 代①三②四③五④六4.影响人们是否产生拥挤感的最主要因素是④ ①情境②人格特点③情绪④密度5.在冒险性操场上活动居第一位的是② ①学前儿童②学龄儿童③青少年④成人★2002年★1 个人即时的需要与公众长远利益的冲突被John Platt称为( C )A 社会矛盾B 社会问题C 社会两难D 个人两难2 据对美国中产阶级白人观察的结果,划分出人在社会交往中的四种距离( A )A HallB AltmanC SeottD Dean3 香与臭是一种( C )A 客观评价B 一般评价C 主观评价D 适应4 座位排列方式适用于师生交往比较多的活动( B )A 矩形B 马蹄形C 圆形D 秧田形5 办公室设计的核心问题是( D )A 保护个体私密性B 成本低C 有利于员工相互监督D 方便沟通二、多项选择题★2007年★6,沃尔维尔德适应水平理论认为,三种环境刺激可以在以下哪些维度水平上发生变化?A,强度 B,刺激得多样性 C,刺激得时间 D,刺激得模式7,莫若比安认为环境负荷包含的环境信息方面的特性有:A,新奇性 B,精确性 C,强度 D,复杂性8,噪音对人的操作的影响包括:A,噪音呈现前的影响 B,噪音呈现期的影响C,噪音间歇期的影响 D,噪音过后的影响9,人类领地的种类主要包括:A,主要领地 B,公共领地 C,私人领地 D,次级领地10,下列选项中,属于坎恩和贺氏提出的环境问题的有:A,资源问题 B,社会两难问题 C,健康问题 D,环境美化问题★2006年★6、设置指路地图遵循的原则为()A.与周围环境结构匹配 B.自我指向的参照系统 C.主观构建的表征 D.不能任意添加、减少、歪曲7、光环境设计应满足下列标准()A.对比 B.明亮 C.舒适 D.艺术感染力8、技术灾难的特点为()A.持续时间不一定 B.有最低点 C.无法预测 D.会增加社会凝聚力9、根据领地对个体或群体的重要性,人类领地可以分为()A.主要领地 B.次级领地 C.公共领地 D.私人领地10、动物园的设计应该考虑的双重作用为()A.教育 B.限制 C.隔离 D.消遣★2005年★6.控制噪音的方法有ABCDA 变化家具摆设B 在公路两侧设置绿化带C采用隔音材料D对噪音源严加控制7.人们对环境恶化程度的认知与专家预测的结果相比,可能ACA 更高 B完全一样C更低 D差不多8.声音的心理属性为ACDA 音高B 振幅C 响度 D音色9.动物园的设计应该考虑的双重作用是ADA教育 B 限制 C 隔离 D 消遣10.能源保护的先行策略有BDA 反馈B 媒体战役C 政策和技术革新D榜样★2004年★6.行为局限理论认为,环境对行为的限制包括以下那些步骤ABDA阻抗 B 觉察到对环境失去控制 C 消除应激 D 习得无助7.有一些情境特征可以促进寻找路径,它们是A可区分性 B 视觉接近的程度 C 空间规划的复杂性 D 自然性8.消除拥挤负性结果的调节方式有BCDA 再现B 想象C 认知重建D 肌肉放松9.操场设计通常包括以下那些形式ABCA 传统式B 现代式C 冒险式D启以式10在老年人室内居住环境的设计中应该注意ABA安全性B无障碍性C经济性D易操作性★2003年★1.影响个体认知地图的因素有①②③对环境的熟悉程度②社会阶层③个体差异④记忆方式2.光环境的设计应具有①②④ 层次明亮②舒适③温暖④艺术感染力3人类领地的功能有①④保护、调整私密性②减少冲突③庇荫④组织功能4.环境美学的反应模型认为①②③④ 决定了个体对环境的反应方式一致性②清晰度③复杂度④神秘性5.环境保护的随后策略包括③④榜样②提示③反馈④技术革新★2002年★1 技术灾难的特点为( AC )A 持续时间不一定B 有最低点C 无法预测D 会增加社会凝聚力2 冒险式操场通常会提供给儿童( AD )A 泥土山B 单杠C 喷泉D 画笔和颜料3 是设计沟通中使用较多的方法,因为它们可以直接明了的说明设计者的意图和构想( BC )A 参与B 模型C 草图D 交流4 颜色的心理特征是( BCD )A 波长B 色调C 饱和度D 明度5 环境心理学研究中收集数据的手段包括( ABC )A 观察B 自我报告C 档案检查D 描述三、填空题★2007年★11,物理环境按人类干预程度的大小的不同可以分为()环境和()环境。
北京自考《工程心理学》02-07年试题题型分类汇总一、单项选择题★2007年★1、人操作机器后,机器状态发生变化的信息通过反馈回路作用于人,人又根据反馈信息对机器的状态作出进一步控制或调整,这种人机系统是()A 开环人机系统B 并联人机系统C 串联人机系统D 闭环人机系统2、在警告信号灯的设计中,我们通常采用下列哪种光源?()A 闪光B 稳定光C 荧光D 自然光3、人机系统按人在系统中的作用分为()A 2类B 3类C 4类D 5类4567891AC2A.开环人机系统 B.闭环人机系统C.串联人机系统 D.并联人机系统3、在工程心理学中,以物质形式或观念形式对实际物体,过程和情境的仿真进行研究的方法,我们称之为()A.实验研究 B.准实验研究C.相关研究 D.模拟研究4、当人的头部和眼球不动时,人眼能觉察到的空间范围,称为()A.视角 B.视野C.视力 D.视距5、在追踪显示时,靶子和受控元素中有一个是固定的,另一个做相对移动,一般固定靶子作为参照物,它们之间的差异代表误差,这种显示方式是()A.尾随显示 B.补偿显示C.滞后显示 D.误差显示6、当有若干刺激,但只需对其中的一种刺激做出反应,这种反应时为()A.简单反应时 B.选择反应时C.辨别反应时 D.潜伏反应时7、在决策时列举一些可能的结果,概率和每项行动的效用。
决策者输入期望概率和效价,通过计算每个选项的平均期望效价,得到一个较为理性的决策,这种决策辅助系统量是()A.专家系统 B.决策树C.决策表 D.认知支持8A9ACAC1AC2AC34AC知觉的选择性 D知觉的整体性5。
当有若干种刺激,不同的刺激触发不同的反应,这种反应时称为( )A简单反应时 B潜伏反应时C辨别反应时 D选择反应时6。
在追踪显示时,当靶子和受控元素都能移动,表明了彼此的位置(或数值)和关系,这种显示方式是( )A尾随显示 B补偿显示C滞后显示 D误差显示7。
根据SRK模型,在决策中,出现注意方向错误主要发生在( )A基于技能的操作阶段 B基于规则的操作阶段C基于知识的操作 D基于情景意识的操作阶段8。
在警告信号灯的设计中,我们通常采用下列哪种光源?( )A 闪光B 稳定光C 荧光D 自然光9。
收音机音量控制旋钮向顺时针方向转动的时候,响度增加,这种现象反映出了显示器和控制器之间的哪种关系?( )A 空间兼容性B 概念兼容性C 运动兼容性D 控制/显示比例10。
设计者为设计系统及其界面的目的而建立的表示用户特性的模型,我们称之为( ) A 用户概念模型 B 设计者模型C 系统映像模型D 用户特性模型★2004年★1A2A3A4A5A6A7()A8A9AA①皮肤②口③舌④耳2.根据PSI周期节律,体力的强弱周期为( ) 天。
①20 ②25 ③23 ④283. ( )是既有相等单位,又有绝对零点的测量量表。
①比例测量②等距测量③顺序测量④类别测量4. ( )是指用户在熟悉系统后能在多大程度上提高其工作效率。
①易学性②有效性③易记性④低失误性5.在Card和Moran等人提出的GOMS模型中,G代表( )①操作②方法③选择④目标★2002年★1 人机系统按照人在系统中的作用特点可以区分为( ) 类。
A 2B 3C 4D 52 ( )是指人体在单位时间内承受的工作量,是评价人机系统的一项重要指标。
A 工作负荷B 心理负荷C 劳动强度D 应激3 视错觉主要是由人的( ) 所决定。
A 心理B 生理C 生理心理D 文化心理4 ( )是操作者将控制信息传递给机器的装置。
A 按钮B 操作杆C 开关D 控制器5 作为一般使用,选择分辨率为( ) 的CRT就可以。
A 640X350B 640X480C 1024X768D 1280X1024二、多项选择题EB 实现了某一不应该实现的任务C 对某一任务作出了不适当的决策D 对某一意外事故的反应迟钝E 没有觉察到某一危险情况★2006年★11、在人机系统中,对操作人员的工作效率和系统的安全发生影响的工作空间设计应考虑到的因素包括()A.工作台的高低B.工作空间的大小C.显示器与控制器的位置D.机具和加工件的排列E。
工作间的距离12、下列事例中,属于机控式人机系统的事例有()A.司机驾驶汽车 B.用割草机割草C.吊车工人操纵起重机 D.用手摇钻钻孔E。
飞行员驾驶飞机13、心理学家通常把相关分为()A.正相关 B.负相关 C.列相关D.零相关 E。
点相关14、注意对信息加工过程发生影响,主要表现在下列哪些方面?()A.注意的选择性BCDEABCDACACACAC吉尔布瑞斯 D闵斯特伯格15。
信号灯和警告灯的光刺激强度,主要由下面哪些因素决定?( )A灯光的呈现时间 B灯光的大小C灯光的颜色 D灯光的亮度★2004年★11、工程心理学的基础是()A.社会心理学 B.实验心理学 C.管理心理学 D.认知心理学12、德国心理学家闵斯特伯格的著作包括()A.《心理技术原理》 B.《开关与表盘》 C.《心理学与工业效率》 D.《工程心理学》13、效度包括()A.内容效度 B.构思效度 C.副本效度 D.预测效度14、人格测量的工具有()A.MMPI B.卡特尔的16PF C.TAT D.艾森克人格问卷15、模拟的逼真度包括()A.情绪逼真度 B.心理逼真度 C.环境逼真度 D.设备逼真度★2003年★1.属于感觉器官的有( )①眼睛②耳朵③鼻子④舌头⑤皮肤2.工程心理学中人─机─环境系统中的环境指( )①物理环境②劳动组织③住房结构④工作制度⑤社会环境19、人机配合包括两个方向的涵义:一是人机()分配;二是人机()特点上的匹配。
20、人和机器的活动都包括()、()和输出三个环节。
21、工作负荷可分为()和()两类。
22、人由明亮转入暗环境,视觉感受性逐步提高的过程是()。
23、追踪环包括四个环节,即显示器、()、()和系统四个部分。
24、听觉显示器按其所显示信息的特点,可分为()显示器和()显示器。
25、软件的可用性有很多标准,最著名的是尼尔森提出的一系列标准,包括()、()、易于记忆、低错误率、用户满意感等。
26、信号灯和警告灯的光刺激强度,主要由灯光的()、()和呈现的时间三方面的因素决定的。
★2006年★16、工程心理学以()为研究对象。
主要研究人的(),人在系统中的行为特点,以及人机间的合理配合等问题。
17、人机系统按人机连接的方式,可以区分为()人机系统和()人机系统。
18、在听觉中,由于干扰声的存在,致使声信号的听觉清晰度阈限升高,这种现象称为()。
19、在关于警戒问题的研究中,有两类警戒模式:()和()。
20、按显示形式可将仪表显示器分为()和()显示器两大类。
21、用户支持系统包括下列辅助机制:(),(),标准的自学程序,在线的内容敏感的自学程序,派人帮助等等。
22、关于事故的原因,主要是从两个方面:()和()来进行分析。
()26。
定量显示器是以数量显示某种变化的显示器。
它既可以显示( )变量(如加速度的快慢,湿度高低),又可以显示( )变量(如用标尺指示长度)。
★2004年★16、GOMS模型中,G代表目标、O代表、M代表、S代表。
17、心理负荷状况评价最直接的方法是。
18、仪表显示器按显示功能分类可分为读数用仪表、检查用仪表、、、。
19、体力(Physical)强弱周期为天,情绪(Sensitive)好坏周期为天,智力(Intellectual)高低周期为天。
20、人体皮肤上分布着三种感受器,分别是、、。
21、人格测量通常采用的三种方式是、、。
22、人的信息传递率变化范围大约为每秒比特。
23、知觉的基本特性包括整体性、选择性、理解性、。
24、踏板可分为旋转式、往复式、。
25、个性特征理论认为,人们存在着某种个性倾向,容易造成事故的称之为“ ”。
★2003年★1.工程心理学以人─机系统为研究对象,研究人的(),人在系统中的(),以及人机间的合理配合等。
2.心理负荷的评定方法有主任务分析、辅助任务分析、()和()。
3.许多研究者认为决策过程是一个从()到()的认知连续体。
4.工程心理学研究的最终目的就是寻找事物之间的(),并进而对事物的发展加以()和()30、控制、显示比(C/D比)31、事故倾向性★2005年★27。
信息传递率28。
菲茨定律29。
满意决策30。
离散控制器31。
应激★2004年★26、运动兼容性27、感觉储存28、顺序测量29、人机界面★2003年★1 效应器官2 预测效度3 暗适应4 心理不应期5 运动兼容性★2002年★1 效应器官33、工程心理学的作用是什么?★2003年★1.简述信息加工模型的6个阶段?2.工作中对人造成压力的原因有哪些?3.生理学模式是怎样看待事故原因的?4.简述Wickens提出的多资源理论?★2002年★1 工程心理学研究的目的和作用有哪些?2 简述PSI周期节律。
3 简述控制器排列的一般原则。
4 事故产生中人的因素包括哪些?六、论述题★2007年★35、试述S-O-R模型,并通过S-O-R模型分析人为失误的主要表现。
36、举例说明开发用户友好性系统的设计原理。
★2006年★35、试述人-计算机交互作用中的GOMS模型,及其在软件设计中的运用。
36、试论述与信息高速公路有关的工程心理学研究内容。
★2005年★35。
请举例说明启发式在决策过程中的运用。
★2004年★。