变位齿轮参数设计计算程序
- 格式:xls
- 大小:30.50 KB
- 文档页数:2
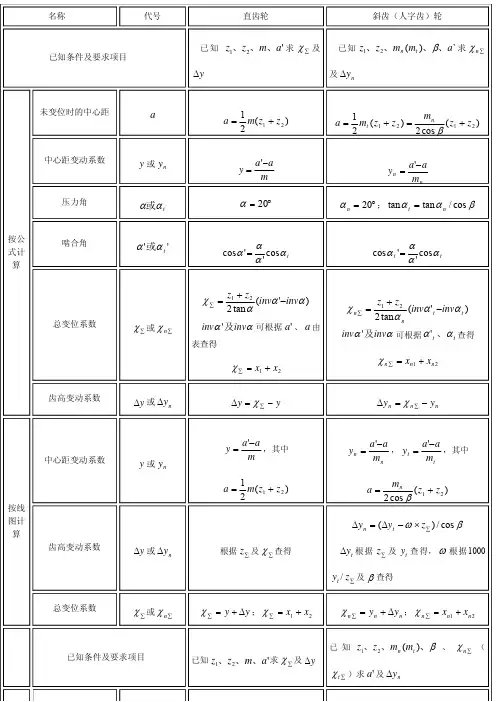
变位齿轮传动的受力分析和强度计算原理与标准齿轮的相同,其计算公式也与标准齿轮相同
齿轮啮合节点位置发生变化,Z H 有变化
2/
2cos tan H Z a a =2/2cos tan H t t Z a a =/a a =/t t a a =高高高高高高 高x Σ=x 1+x 2=0:
Z H 高高高高高高高高高高高高高
或/a a >/t t a a >/a a </t t
a a <高x Σ>0高高高高高高高高Z H 高高高εα高高高Z ε高高高
高Z H 高高高εα高高高Z ε高高高或齿面接触强度提高。
当xΣ<0(负传动)时,或齿面接触强度降低。
角变位传动即x Σ=x 1+x 2≠0 :
二、齿根弯曲强度齿根弯曲强度:
变位使齿形变化,齿根厚度和齿根圆角半径变化,引起计算系数Y Fa 和Y sa 的变化,影响齿根弯曲强度。
正变位齿轮的齿厚增大,Y Fa 减小,
齿根圆角半径减小,Y sa 增大。
正变位齿轮的齿根弯曲强度可有提高。
负变位使齿根弯曲强度降低。
变位使端面重合度系数εa 变化,Y ε也发生变化。
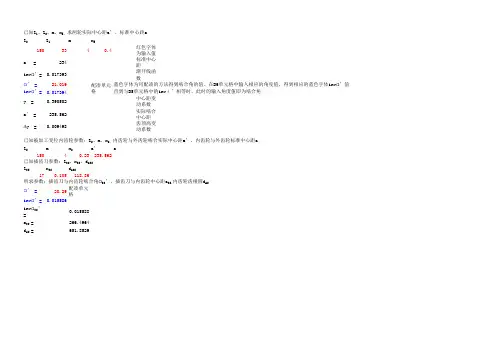
Z 2
Z 1m x E 150
3340.4
红色字体为输入值a =
234标准中心距inv а’=
0.017393渐开线函数а’ =
21.019inv а’=
0.017394y =
0.390502中心距变动系数a’ =
235.562
实际啮合中心距
∆y =0.009498齿顶高变动系数Z 2m x 2a’a
15040.23235.562
Z 02x 02d a02
170.105118.86
а’ =20.29配凑单元格
inv а’=0.015586
inv а02’=0.015588
a 02 =
266.4964d f2 =651.8529已知被加工变位内齿轮参数:Z 2、m、x 2、内齿轮与外齿轮啮合实际中心距a’、内齿轮与外齿轮标准中心距a 已知插齿刀参数:Z 02、x 02、d a02
所求参数:插齿刀与内齿轮啮合角а02’,插齿刀与内齿轮中心距a 02,内齿轮齿根圆d f2已知Z 1、Z 2、m、x E,求两轮实际中心距a’、标准中心距a 蓝色字体为用配凑的方法得到啮合角的值。
在B6单元格中输入相应的角度值,得到相应的蓝色字体inv а’值直到与B5单元格中的inv а’相等时,此时的输入角度值即为啮合角配凑单元格。
标准齿轮变位系数
标准齿轮变位系数,又称修形系数,是齿轮行业中一个重要的参数。
它是指齿轮齿形弧线在设计时所加入的修正量,以弥补理论齿形与实际齿形误差之间的差异,达到减小齿轮工作时的噪声和振动,提高齿轮传动的精度和使用寿命。
标准齿轮变位系数的计算方法是根据齿轮设计所需副调量和齿数、模数等参数来确定。
修型系数的计算公式为:
*X = (a0 + a1(m-2.5) + a2(m-2.5)^2) / cosαm
其中,a0、a1、a2是常数,αm是压力角,m是模数。
标准齿轮变位系数还受到其他因素的影响,如齿顶高度、弧齿间隙等。
因此,在齿轮设计中,要根据实际情况适当调整修型系数的大小,以达到最佳的使用效果。
在齿轮加工中,标准齿轮变位系数的控制非常重要。
一般来说,修型系数过大或过小都会对齿轮的传动性能产生不良影响。
修型系数过大会导致齿形过修,使齿轮噪声和振动等问题更加严重;修型系数过小则会使齿轮实际齿形与理论齿形之间的误差增大,影响齿轮传动的精度和寿命。
总之,标准齿轮变位系数是齿轮设计与加工中一个非常关键的参数。
它对于提高齿轮传动效率、降低噪声和振动、延长使用寿命等方面都有着重要作用。
因此,
在齿轮设计和制造的过程中,要严格按照标准齿轮变位系数要求进行控制,以确保齿轮传动的质量和可靠性。
《装备制造技术》2013年第1期变位齿轮一般用于调整中心距,改进齿轮啮合情况以及提高齿轮的抗弯强度。
在实际使用中,对于一对相互啮合的齿轮副,往往是其中的一个齿轮采用正变位,而另一个齿轮采用负变位,并且正负变位量的绝对值相等。
这样,我们在加强了一个齿轮强度的同时,又削弱了与其相啮合的另外一个齿轮的强度,无法达到提高整个齿轮副强度的效果。
下面就针对一般正、负变位齿轮副存在的不足,进行了对齿轮副全正变位的设计计算。
1设计计算的方案要实现全正变位的方案,有两个途径:一是,减小齿数,即通过减小齿数先将中心距减小,再通过正变位将中心距增加到原有尺寸,这样还有一个齿轮参数要改变,即啮合角α;二是,齿数不变,但要改变螺旋角β和啮合角α两个参数,以调整中心距。
现分别计算如下:1.1减少齿数我们假定一对齿轮副的原始参数为:齿数:Z1=28,Z2=54,传动比I=Z2/Z1=54/28=1.92857,压力角α=20°,螺旋角β=27.726°,齿顶高系数h a=1,齿根高系数h f=1.25,中心距a=555.818mm,模数m=12mm。
现取Z1=27,Z2=52,则传动比I=Z2/Z1=52/27=1.92593。
(1)计算速比偏差ε:ε=(I-i)/I×100%=0.137%传动比改变很小,说明齿数选择合适。
(2)根据变位齿轮基本公式:a'=acosα/cosα'(1)其中,a为齿数改变后的中心距;a'为改进后的中心距,由于中心距不变,因此a'=a=555.818mm;α为分度圆与节圆重合时的啮合角,取20°;α'为改进后的啮合角。
根据斜齿轮副中心距计算公式:a=m(Z1+Z2)/2COSβ则a'=(m(Z1+Z2)/2COSβ)cosα/cosα'其中:a'=a=555.818mm,m=12,Z2=52,Z1=27,α=20°,β=27.726°。
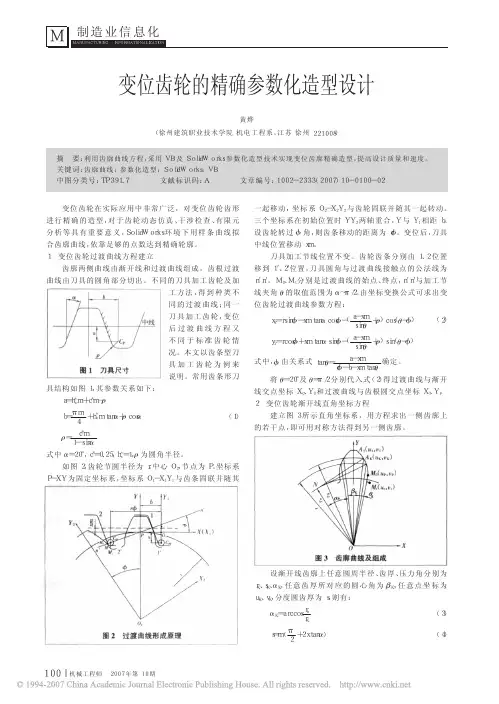
变位齿轮几何尺寸计算
变位齿轮是齿轮传动系统中常用的一种齿轮,主要用于传递旋转运动和扭矩。
其特点是在齿轮齿条的侧面具有斜面,能够实现平滑传动和减小齿轮传动时的冲击和噪声。
在设计变位齿轮时,需要进行几何尺寸的计算来保证齿轮的运转性能。
变位齿轮的几何尺寸计算主要包括齿轮的模数、齿数、齿顶高和齿根深等参数。
下面将详细介绍每个参数的计算方法。
1.模数(m)的计算:
模数是齿轮齿条的基本尺寸,它表示齿轮齿条的大小。
模数的计算根据传动所需的扭矩和功率来确定,通常使用公式:
m=K∛(T/P)
其中,m为模数,K为系数(一般取20),T为传动所需扭矩,P为传动功率。
2.齿数(z)的计算:
齿数表示齿轮上的齿的数量。
齿数的计算根据传动比和模数来确定,一般使用公式:
z=m×i
其中,i为传动比。
3.齿顶高(h_a)和齿根深(h_f)的计算:
齿顶高表示齿轮齿条的最高点到齿顶的距离,齿根深表示齿轮齿条的最低点到齿底的距离。
它们的计算可以使用公式:
h_a=1.25×m
h_f=1.35×m
上述是变位齿轮几何尺寸计算的基本方法,但实际设计中还需要考虑齿轮的齿向角、齿轮间的啮合角、齿轮侧隙等因素。
此外,变位齿轮的几何尺寸还需要满足一些额外的要求,如齿轮的强度和刚度等。
关于变位齿轮几何尺寸计算的更详细内容可以参考相关的齿轮设计手册和专业参考书籍。
变位齿轮参数及计算齿轮是一种常用的传动装置,主要用于将转速和力量传递给其他机械设备。
变位齿轮是一种特殊类型的齿轮,其主要功能是改变传动比和方向。
1. 齿轮模数(Module):齿轮模数是反映齿轮尺寸的一个重要参数。
它定义了齿轮上每毫米的齿数。
齿轮模数的选择取决于传动的要求和设计规范。
2. 公法线半径(Pitch Radius):公法线半径是从齿轮齿面中心到齿廓处的距离。
它表示了齿轮大小的一个重要指标。
3. 夹角(Pressure Angle):夹角是齿轮齿廓线和法线之间的夹角。
常见的夹角有20度和14.5度两种。
夹角的选择取决于齿轮的使用条件和设计要求。
变位齿轮的计算方法主要包括齿数计算、齿廓绘制和传动比计算。
1.齿数计算:齿数计算是确定变位齿轮的基本参数之一、可以使用下列公式进行计算:Z1=N1/mZ2=N2/mZt=Z1+Z2其中,Z1和Z2分别为小齿轮和大齿轮的齿数,N1和N2为小齿轮和大齿轮的转速,m为齿轮模数,Zt为总齿数。
2.齿廓绘制:变位齿轮的齿廓是根据齿轮参数和齿轮轴心位置绘制出来的。
可以使用软件进行计算和绘制,也可以使用手动计算和绘图方法。
绘制齿廓时需要考虑齿轮的齿顶高度、齿根高度和齿廓曲线。
3.传动比计算:传动比是指变位齿轮传动时输出轴的转速与输入轴的转速之比。
可以用下列公式进行计算:i=Z2/Z1其中,i为传动比,Z1和Z2分别为小齿轮和大齿轮的齿数。
通过以上参数和计算步骤,可以确定变位齿轮的设计参数和计算结果。
齿轮的设计和计算是齿轮传动工程中的重要内容,合理的设计和计算可以保证齿轮传动的安全和可靠性。

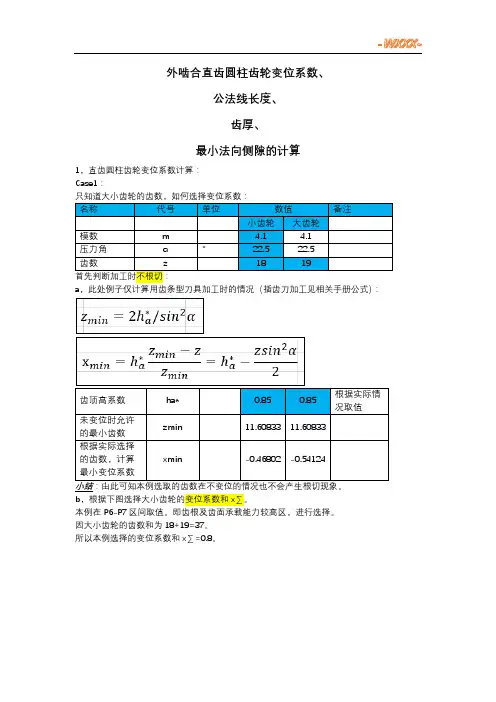
外啮合直齿圆柱齿轮变位系数、公法线长度、齿厚、最小法向侧隙的计算1,直齿圆柱齿轮变位系数计算:Case1:a,此处例子仅计算用齿条型刀具加工时的情况(插齿刀加工见相关手册公式):小结:由此可知本例选取的齿数在不变位的情况也不会产生根切现象。
b,根据下图选择大小齿轮的变位系数和x∑。
本例在P6-P7区间取值。
即齿根及齿面承载能力较高区,进行选择。
因大小齿轮的齿数和为18+19=37。
所以本例选择的变位系数和x∑=0.8。
本例我们的两个齿轮在工作时属于减速运动,所以按减速运动的变位系数分配线图,进行2个齿轮的变位系数的选择。
先按(z1+z1)/2=18.5,作为横坐标,做一条垂线(图中蓝色的线),再按x∑/2=0.4,作为纵坐标,做一条水平线(图中橙色的线),接着沿着L线的趋势,穿过上面2条线的交点做一条射线(图中红色的线)最后按大小齿轮的齿数做相应的垂线(图中紫色的线),即得到需要的各自变位系数。
最后我们选择的变位系数即为:小齿轮x1=0.42,大齿轮x2=0.38。
【基本保障其和与之前x ∑一致,即可】。
c,验算变位后的齿顶厚度:注:一般要求齿顶厚Sa≥0.25m;对于表面淬火的齿轮要求Sa≥0.4m下表中的da的计算见后面的计算表格中的计算公式(因为当齿轮变位后,齿顶圆的计算和未变位齿轮的计算稍有差别-涉及到变位系数和中心距变位系数。
)。
分度圆直径db mm 73.8 77.9齿轮的齿顶圆直径da mm 83.027 86.799齿轮的齿顶压力角αa °27.27 26.17中间值invα0.0215 0.0215中间值invαa 0.0587 0.0347齿顶厚Sα 5.77 7.47判断值0.25m 1.025 1.025判断值0.4m 1.64 1.64小结:计算发现变位后的齿轮齿顶厚满足设计需求。
根据上面确定的变位系数,计算齿轮的中心距变位系数和节圆直径、齿根圆直径、齿顶圆直径。
变位齿轮的计算方法变位齿轮是一种齿轮传动装置,它由两个或多个具有不同齿数的齿轮组成,通过啮合来传递动力和运动。
变位齿轮广泛应用于各种机械设备中,如汽车变速器、工程机械、纺织机械等。
在设计和计算变位齿轮时,需要考虑齿轮的齿数、模数、齿宽、啮合角等参数。
下面将介绍变位齿轮的计算方法。
一、齿轮齿数的选择:在变位齿轮传动设计中,首先要确定齿轮的齿数。
齿数的选择需要考虑传动比、装置的重量、运动平稳性等因素。
一般来说,齿数越多,传动比越大,装置越重,运动平稳性越差。
因此,需要在齿数和传动比之间进行权衡。
二、模数的确定:模数是变位齿轮设计中的一个重要参数,它决定了齿轮的尺寸和齿面强度。
模数的选择需要根据变位齿轮的工作条件和要求来确定。
通常情况下,模数应该使齿轮在满足强度要求的前提下,尽可能小,以减小齿轮的体积和重量。
三、齿宽的计算:齿宽是指齿轮齿面的有效工作宽度,它决定了变位齿轮传动的承载能力和寿命。
齿宽的计算需要考虑齿轮的载荷、齿数和模数等因素。
一般来说,齿宽应该使齿轮在满足强度要求的前提下,尽可能小,以减小齿轮的尺寸和重量。
四、啮合角的计算:啮合角是指变位齿轮齿面的啮合角度,它决定了齿轮传动的配合性能和工作平稳性。
啮合角的计算需要考虑齿轮的齿数、齿宽和模数等因素。
一般来说,啮合角应该使齿轮在满足配合性能要求的前提下,尽可能小,以减小齿轮的摩擦和磨损。
以上是变位齿轮的基本计算方法。
在实际设计和计算中,还需要考虑齿面的修形、齿轮的加工精度、齿轮的轴向力和径向力等因素。
设计变位齿轮需要综合考虑齿轮传动的强度、齿轮的尺寸和重量、齿轮的运动平稳性和配合性能等因素,以满足机械设备的要求。
一.带安全阀齿轮泵齿轮零件图所需参数表法面模数nm 4齿数z 10压力角α20°全齿高h 9.1199螺旋角β9.63°螺旋方向右变位系数x 0.40394精度等级8-7-7JL齿圈径向跳动Fr 0.050公法线长度变动公差Fw 0.040基节极限偏差±fpb ±0.016齿形公差ff0.014齿向公差Fb 0.011齿厚上偏差Ess -0.186下偏差Esi -0.288二.齿轮测绘和变位齿轮参数测量和计算一.任务内容:根据齿轮测绘的数据,计算出齿轮的各参数,为齿轮零件图提供正确数据。
二.准备知识1.变位齿轮的定义:通过改变标准刀具对齿轮毛坯的径向位置或改变标准刀具的齿槽宽度切制出的齿形为非标准渐开线齿形的齿轮。
2.齿轮类型判别:两齿轮为大小相同的一对斜齿轮,齿数为10。
因此,齿轮是变位齿轮。
标准的渐开线齿轮的最小齿数应是17个齿。
本齿轮泵中的齿轮齿数少于17个齿,就一定是变位齿轮。
变位齿轮使齿轮传动结构紧凑,齿轮的强度增加。
3.变位齿轮的类型变位齿轮有两大类:高度变位传动和角度变位传动,如下表所示。
传动类型高度变位传动又称零传动角度变位传动正传动负传动齿数条件z1+z2≥2Zmin z1+z2<2zmin z1+z2>2zmin 变位系数要求x1+x2=0,x1=-x2≠0x1+x2>0 x1+x2<0 传动特点a'=a, α'=α, y=0 a'>a, α'>α, y>0 a'<a, α'<α,y<0主要优点小齿轮取正变位,允许z1<zmin ,减小传动尺寸。
提高了小齿轮齿根强度,减小了小齿轮齿面磨损,可成对替换标准齿轮。
传动机构更加紧凑,提高了抗弯强度和接触强度,提高了耐磨性能,可满足a'>a 的中心距要求。
重合度略有提高,满足a'<a 的中心距要求。