控制系统的传递函数及信号流图和梅逊公式
- 格式:pptx
- 大小:334.32 KB
- 文档页数:23
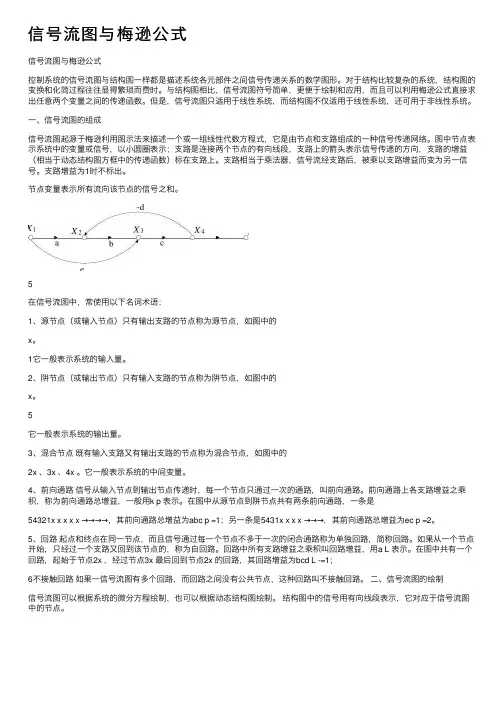
信号流图与梅逊公式信号流图与梅逊公式控制系统的信号流图与结构图⼀样都是描述系统各元部件之间信号传递关系的数学图形。
对于结构⽐较复杂的系统,结构图的变换和化简过程往往显得繁琐⽽费时。
与结构图相⽐,信号流图符号简单,更便于绘制和应⽤,⽽且可以利⽤梅逊公式直接求出任意两个变量之间的传递函数。
但是,信号流图只适⽤于线性系统,⽽结构图不仅适⽤于线性系统,还可⽤于⾮线性系统。
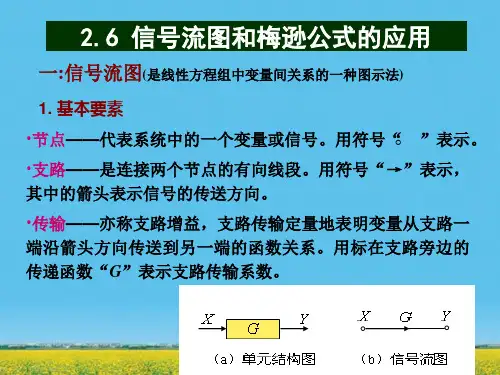
⼀、信号流图的组成信号流图起源于梅逊利⽤图⽰法来描述⼀个或⼀组线性代数⽅程式,它是由节点和⽀路组成的⼀种信号传递⽹络。
图中节点表⽰系统中的变量或信号,以⼩圆圈表⽰;⽀路是连接两个节点的有向线段,⽀路上的箭头表⽰信号传递的⽅向,⽀路的增益(相当于动态结构图⽅框中的传递函数)标在⽀路上。
⽀路相当于乘法器,信号流经⽀路后,被乘以⽀路增益⽽变为另⼀信号。
⽀路增益为1时不标出。
节点变量表⽰所有流向该节点的信号之和。
5在信号流图中,常使⽤以下名词术语:1、源节点(或输⼊节点)只有输出⽀路的节点称为源节点,如图中的x。
1它⼀般表⽰系统的输⼊量。
2、阱节点(或输出节点)只有输⼊⽀路的节点称为阱节点,如图中的x。
5它⼀般表⽰系统的输出量。
3、混合节点既有输⼊⽀路⼜有输出⽀路的节点称为混合节点,如图中的2x 、3x 、4x 。
它⼀般表⽰系统的中间变量。
4、前向通路信号从输⼊节点到输出节点传递时,每⼀个节点只通过⼀次的通路,叫前向通路。
前向通路上各⽀路增益之乘积,称为前向通路总增益,⼀般⽤k p 表⽰。
在图中从源节点到阱节点共有两条前向通路,⼀条是54321x x x x x →→→→,其前向通路总增益为abc p =1;另⼀条是5431x x x x →→→,其前向通路总增益为ec p =2。
5、回路起点和终点在同⼀节点,⽽且信号通过每⼀个节点不多于⼀次的闭合通路称为单独回路,简称回路。
如果从⼀个节点开始,只经过⼀个⽀路⼜回到该节点的,称为⾃回路。
回路中所有⽀路增益之乘积叫回路增益,⽤a L 表⽰。

第七节 信号流图及梅逊公式一、信号流图信号流图——控制系统中信号传递关系的图解描述。
(相比方块图其符号简单,更容易绘制)1、组成(1)节点用“○”表示,标志系统的变量(输入、输出及中间变量),变量值为所有输入到该节点的信号之代数总和。
根据节点的输入输出特点又细分为:增益。
支路表示连接的两个节点变量之间的关系,2、(1节点的信号之代数和,与输出无关。
从同一节点流出的信号均等于该节点变量,与流入312X AX BX =+ 43X CX = 53X DX =(2)信号在支路上沿箭头方向单向传递。
(3)支路相当于一个乘法器,信号流经支路时,被乘以支路增益而变换为另一个信号。
(支路增益为“1”时,可不标出) (4)在混合节点上,增加一条具有单位增益的输出支路,可以从信号流图中分离出系统变量。
即变混合节点为汇节点,分离前二、由方块图到信号流图方块图 信号流图信号线节点信号线上传递的信号节点变量方块及传递函数支路传递方向及增益引出点出支路比较点入支路方块图中一条信号线就对应一个节点。
例例3:画出如图机械系统输入力()f t,⎪⎩112122222()()()()()()()()()()()()1122111122222F s K BS X s X s m S X s K BS X s X s K X s m S X s ⎧2⎡⎤−+−⎣⎦⎪⎪=⎪⇒⎨⎡⎤+−−⎪⎣⎦⎪=⎪⎩12由图知,系统有三个变量()f t 、()1x t 、()2x t ,它们对应()F s 、()1X s 、()2X s将其写成依次单向关系。
由2式推出()()()()()()22212111212221m S K K BS X s K BS X s K BS X s X s m S K K BS +++=++⇒=+++由1式加2式推出()()()()()()()()22112222122211m S X s F s K m S X s 2X s F s K m S X m S =−+s ⎡⎤⇒=−+⎣⎦简化)外,用的最多的却是梅逊增益公式。
果关
2.信号流图的性质
l信号流图适用于线性系统。
l支路表示一个信号对另一个信号的函数关系,信号只能沿支路上的箭头指向传递。
l在节点上可以把所有输入支路的信号叠加,并把相加后的信号送到所有的输出支路。
l具有输入和输出节点的混合节点,通过增加一个具有单位增益的支路把它作为输出节点来处理。
l对于一个给定的系统,信号流图不是唯一的,由于描述同一个系统的方程可以表示为不同的形式。
的方
一节点,
节点
小圆圈
条
=
1
4条
:系统有单个路条,两两互不接路7
求:
2.4.6 闭环系统的传递函数。