【图文】步进电机、伺服电机基础知识
- 格式:doc
- 大小:631.00 KB
- 文档页数:11



伺服电机伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电机1、伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
2、无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。

伺服电机和步进电机是现代工业中常见的两种电机类型,它们都有着广泛的应用领域,但是在工作原理、性能特点和适用场景上有着明显的区别。
在本文中,我们将对这两种电机进行通俗易懂的解释,帮助读者更好地理解它们的工作原理和特点。
一、伺服电机1.1 工作原理伺服电机通过控制系统对电机的转矩、速度和位置进行精确的调节,以实现精准的运动控制。
通常情况下,伺服电机由电机、编码器、控制器和反馈系统等组成。
控制器接收指令并通过反馈系统获取实际运动状态,然后调节电机的输出来实现所需的运动控制。
1.2 特点(1)精准控制:伺服电机能够实现高精度的位置控制和速度控制,广泛应用于需要高精度运动控制的场合。
(2)响应速度快:由于采用了闭环控制系统,伺服电机的响应速度非常快,能够迅速响应外部指令并实现快速准确的运动。
(3)负载能力强:伺服电机能够承受较大的负载,在高速、高精度运动控制的情况下仍能保持稳定的输出。
1.3 应用领域伺服电机广泛应用于数控机床、工业机器人、印刷设备、纺织设备等需要高精度运动控制的领域,以及飞行器、导弹、船舶等需要快速响应和精准控制的领域。
二、步进电机2.1 工作原理步进电机是一种数字式电机,通过依次通电给定的电磁线圈,使电机按一定的步距顺序转动。
步进电机的步距角和步距数与其结构有关,不同的步进电机有不同的步距角和步距数。
2.2 特点(1)结构简单:步进电机结构相对简单,通常由定子、转子、电磁线圈和控制电路组成,维护和安装相对方便。
(2)定位精度高:步进电机能够实现高精度的位置控制,适用于一些需要精准定位的场合。
(3)低速高扭矩:步进电机在低速情况下能够提供较大的输出扭矩,适合一些需要较大输出扭矩和低速运动的场合。
2.3 应用领域步进电机广泛应用于打印机、数码相机、纺织设备、医疗设备、自动售货机等需要精准定位和低速高扭矩输出的领域。
三、伺服电机和步进电机的比较3.1 工作原理对比伺服电机通过控制系统对电机的转矩、速度和位置进行精确的调节,实现精准的运动控制;步进电机是一种数字式电机,通过依次通电给定的电磁线圈,使电机按一定的步距顺序转动。
步进电机及驱动器、 交流伺服电机及驱动器原理与应用深圳市雷泰控制技术有限公司 2008.12.18.- 1 -一.步进电机及驱动器原理步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化 设备中。
步进电机和普通电动机不同之处在于它是一种将电脉冲信号转化为角位移的 执行机构,它同时完成两个工作:一是传递转矩,二是控制转角位置或速度。
1. 步进电机工作原理 图 1.1 为两相步进电机的工作原理示意图,它有 2 个绕组。
当一个绕组通电后, 其定子磁极产生磁场,将转子吸合到此磁极处。
若绕组在控制脉冲的作用下,通电方 向顺序按照 A A ® B B ® A A ® B B 四个状态周而复始进行变化,电机可顺时针转 动;通电时序为 A A ® B B ® A A ® B B 时,电机就逆时针转动。
控制脉冲每作用 一次,通电方向就变化一次,使电机转动一步,即 90 度。
4 个脉冲,电机转动一圈。
脉冲频率越高,电机转动越快。
步进电机的输出力矩与电机的有效体积、线圈匝数、磁通量、电流成正比,因此, 电机有效体积越大,线圈匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
定子A转子AS N B S N A(a) A N S B N S A (c)图 1.1 两相步进电机原理图N S B B N S B(b) A AS N B B S N BA (d)- 2 -2.步进电机结构图 1.2步进电机结构图3.驱动器原理: 步进电机必须有驱动器和控制器才能正常工作。
驱动器的作用是对控制脉冲进行 环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。
Vcc 脉冲信号 环行 分配器 细分电路 功率 放大 A A B B 步进电机驱动器 步进电机控制器方向信号图 1.3 步进电机控制系统- 3 -以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经 过环形分配器和功率放大后,给电机绕组通电的顺序为 A A ® B B ® A A ® B B , 其四个状态周而复始进行变化,电机顺时针转动;若方向信号变为负时,通电时序就 变为 A A ® B B ® A A ® B B ,电机就逆时针转动。
随着生产过程机械化、电气化和自动化的不断发展,出现了各种类型的特种电动机。
这些电动机的工作原理,一般与普通的异步电动机和直流电动机的基本原理近似,但是它们在性能、结构、生产工艺上各有其特殊性,多用于自动控制过程中。
一般来说,这些电动机的功率不大,小的只有几分之一瓦,大的也不过几十瓦或几百瓦,属于微型电动机的范围。
步进电动机一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
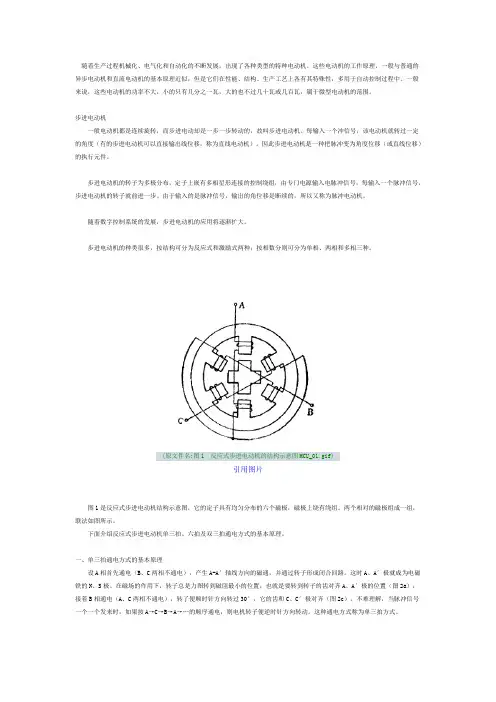
步进电动机的种类很多,按结构可分为反应式和激励式两种;按相数分则可分为单相、两相和多相三种。
(原文件名:图1 反应式步进电动机的结构示意图MCU_01.gif)引用图片图1是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
两个相对的磁极组成一组,联法如图所示。
下面介绍反应式步进电动机单三拍、六拍及双三拍通电方式的基本原理。
一、单三拍通电方式的基本原理设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。
这时A、A′极就成为电磁铁的N、S极。
在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是要转到转子的齿对齐A、A′极的位置(图2a);接着B相通电(A、C两相不通电),转了便顺时针方向转过30°,它的齿和C、C′极对齐(图2c)。
不难理解,当脉冲信号一个一个发来时,如果按A→C→B→A→…的顺序通电,则电机转子便逆时针方向转动。
这种通电方式称为单三拍方式。
应用:应用:直流伺服电机的特性较交流伺服电机硬。
经常直流伺服电机的特性较交流伺服电机硬。
用在功率稍大的系统中,它的输出功率一般为用在功率稍大的系统中,它的输出功率一般为1600W。
它的用途很多,如随动系统中的位置控。
它的用途很多,制等。
制等。
21 Super Lighting
4、PLC编程实现 PLC编程实现脉冲输出的使用:可变脉冲输出:脉冲输出:有加减速脉冲输出:原点回归: 22 Super Lighting
绝对定位:相对定位: 23 Super Lighting
5、步进电机与伺服电机的区别虽然两种电机控制上相似(都是才用脉冲信号和方向信号,但使用性能和场合上存在着较大的差异。
一、控制精度不同。
二、低频特性不同。
三、矩频特性不同。
四、过载能力不同。
区别五、运行性能不同。
六、速度响应性能不同。
24 Super Lighting。