2019矩阵分析复习提纲
- 格式:pdf
- 大小:302.10 KB
- 文档页数:7
第一章 线性空间与线性变换1、 充分理解抽象线性空间的概念,掌握向量的线性表出,线性相关,线性无关的判断与性质.P5,例1.1.82、 掌握线性空间的基,维数,坐标的定义与求法,掌握基变换与坐标变换,明确过渡矩阵必可逆,会求过渡矩阵.P12,例1.2.63、 理解线性子空间的概念,重点掌握齐次线性方程组的解空间与生成子空间,理解线性子空间的交与和以及维数公式,了解子空间的直和与补子空间.P19,例1.3.54、 掌握线性映射(变换)的概念, 线性映射(变换)的矩阵表示以及一个线性变换在不同基下矩阵之间的(相似)关系.P30,例1.4.8,P35,例1.6.15、 会求线性映射的核与值域,理解秩与零度定理P33,例1.5.16、 理解线性变换不变子空间的定义与性质.7、 会求矩阵(线性变换)的特征值与特征向量,理解矩阵(线性变换)的特征值与特征向量的性质8、 掌握矩阵可对角化的条件,理解矩阵族同时可对角化的含义.第二章 λ-矩阵与矩阵的Jordan 标准形1、会求λ-矩阵的Smith 标准形2、会求λ-矩阵的不变因子,行列式因子和初等因子.明确三者之间的关系(特别是:初等因子+矩阵秩可决定不变因子) .P72,例2.2.1, 例2.2.23、理解λ-矩阵等价的几个充分必要条件.4、掌握矩阵Jordan 标准形的定义,会求矩阵的Jordan 标准形及其相似变换矩阵. P79例2.3.3第三章 内积空间, 正规矩阵, Hermite 矩阵1、掌握欧氏空间和酉空间的定义与性质,掌握Hermite 矩阵的定义与性质,会求欧氏(酉)空间的度量矩阵(P94),明确欧氏空间的度量矩阵为实对称阵, 酉空间的度量矩阵为Hermite 矩阵. 例:在线性空间[]3x R 中定义内积()⎰-=11)()()(),(dx x g x f x g x f(1) 、证明[]3x R 是欧氏空间;(2) 、求基1,2,x x 的度量矩阵; (3) 、求21)(x x x f +-=与2541)(x x x g --=的内积.2、掌握线性无关向量组的Schmidt 正交化与单位化方法P100,例3.2.13、掌握酉矩阵和正交矩阵的定义与性质,理解酉变换与正交变换的定义与性质4、掌握Schur 引理的内容及实现过程,掌握正规矩阵的定义与性质P114,例3.5.1第四章 矩阵分解1、掌握矩阵满秩分解的定义以及具体分解方法,明确矩阵满秩分解表达式不唯一,及其应用于求矩阵广义逆.2、掌握矩阵正交三角分解的定义以及具体分解方法,理解矩阵正交三角分解与Schmidt 正交化与单位化方法之间的关系.P148,例4.2.1例:求矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101011110A 的正交三角(UR)分解.第五章 向量与矩阵范数1、理解向量范数的定义,会判断所给定义是否可作为向量范数,会求向量的p-范数,1-范数,2-范数, ∞-范数,学习指导上例5.12、理解矩阵范数的定义,会判断所给定义是否可作为矩阵范数3、理解矩阵范数与向量范数的相容性,掌握诱导范数的定义,会求矩阵的1-范数(列和范数), 2-范数(谱范数),∞-范数(行和范数),谱半径,学习指导上例5.6,例5.7 4、理解矩阵序列极限与矩阵序列敛散性的含义,会求矩阵序列极限,会判断矩阵序列敛散性,学习指导上例5.185、掌握矩阵幂级数敛散性的含义,会判断矩阵幂级数的敛散性,并会求收敛幂级数的和,学习指导上例5.20,例5.21,例5.22。
【最新整理,下载后即可编辑】矩阵和行列式复习知识梳理9.1矩阵的概念: 矩阵:像[27],[4202],[945354]的矩形数字(或字母)阵列称为矩阵.通常用大写字母A 、B 、C…表示三个矩阵分别是2×1矩阵,2×2矩阵(二阶矩阵),2×3矩阵;① 矩阵行的个数在前。
② 矩阵相等:行数、列数相等,对应的元素也相等的两个矩阵,称为A =B 。
行向量、列向量单位矩阵的定义:主对角线元素为1,其余元素均为0的矩阵 增广矩阵的含义及意义:在系数矩阵的右边添上线性方程组等号右边的值的矩阵。
通过矩阵变换,解决多元一次方程的解。
9.2矩阵的运算 【矩阵加法】不同阶的矩阵不可以相加;记11122122A A A A A =⎡⎤⎢⎥⎣⎦,11122122B B B B B =⎡⎤⎢⎥⎣⎦,那么⎥⎦⎤⎢⎣⎡++++=+2222212112121111B A B A B A B A B A ,【矩阵乘法】,[A 1A 2]×[A 1A 2]=11122122A B A B A B A B ⎡⎤⎢⎥⎣⎦; ⎥⎦⎤⎢⎣⎡++++=22221221212211212212121121121111B A B A B A B A B A B A B A B A AB 【矩阵的数乘】().ij kA Ak ka ==【矩阵变换】相似变换的变换矩阵特点:k [1001]等轴对称变换的变换矩阵:[−1001]、[100−1]、[0110]等旋转变换的变换矩阵:[0−110]等9.3二阶行列式【行列式】行列式是由解线性方程组产生的一种算式; 行列式是若干数字组成的一个类似于矩阵的方阵,与矩阵不同的是,矩阵的表示是用中括号,而行列式则用线段。
行列式行数、列数一定相等;矩阵行数、列数不一定相等。
二阶行列式的值a d D ac bd bc==-展开式ac - bd【二元线性方程组】 对于二元一次方程组111222a xb yc a x b y c +=⎧⎨+=⎩,通过加减消元法转化为方程组xy D x D D y D ⋅=⎧⎪⎨⋅=⎪⎩其中111111222222,,x y a b c b a c D D D a b c b a c ===方程的解为{A =A A A A =AAA用行列式来讨论二元一次方程组解的情况。
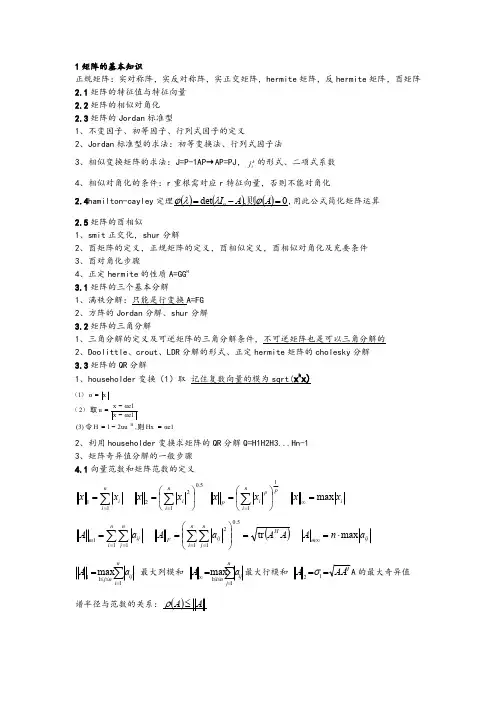
1矩阵的基本知识正规矩阵:实对称阵,实反对称阵,实正交矩阵,hermite 矩阵,反hermite 矩阵,酉矩阵2.1矩阵的特征值与特征向量2.2矩阵的相似对角化2.3矩阵的Jordan 标准型1、不变因子、初等因子、行列式因子的定义2、Jordan 标准型的求法:初等变换法、行列式因子法3、相似变换矩阵的求法:J=P-1AP→AP=PJ,k i j 的形式、二项式系数4、相似对角化的条件:r 重根需对应r 特征向量,否则不能对角化2.4hamilton-cayley 定理()()()0,det =-=A A I n ϕλλϕ则,用此公式简化矩阵运算2.5矩阵的酉相似1、smit 正交化,shur 分解2、酉矩阵的定义,正规矩阵的定义,酉相似定义,酉相似对角化及充要条件3、酉对角化步骤4、正定hermite 的性质A=GG H3.1矩阵的三个基本分解1、满秩分解:只能是行变换A=FG2、方阵的Jordan 分解、shur 分解3.2矩阵的三角分解1、三角分解的定义及可逆矩阵的三角分解条件,不可逆矩阵也是可以三角分解的2、Doolittle、crout、LDR 分解的形式、正定hermite 矩阵的cholesky 分解3.3矩阵的QR 分解1、householder 变换(1)取记住复数向量的模为sqrt(x hx)αe1Hx 则,2uu 1H 令(3)αe1x αe1x u 取2x α1H=-=--==)()(2、利用householder 变换求矩阵的QR 分解Q=H1H2H3...Hn-13、矩阵奇异值分解的一般步骤4.1向量范数和矩阵范数的定义∑==ni ix x 115.0122⎪⎭⎫ ⎝⎛=∑=ni i x x pni p i px x11⎪⎭⎫⎝⎛=∑=ix xmax =∞∑∑===ni nj ijm a A 111()AA a A H n i n j ij Ftr 5.0112=⎪⎪⎭⎫ ⎝⎛=∑∑==ijm a n A max ⋅=∞∑=≤≤=ni ij nj a A 111max 最大列模和∑=≤≤∞=nj ij ni a A 11max 最大行模和H AA A ==12σA 的最大奇异值谱半径与范数的关系:()AA ≤ρ4.2矩阵级数,矩阵幂级数,收敛性()1-∞=-=∑A I A k k,当级数∑∞=0k kA收敛时即()1<A ρ4.3矩阵函数:几个常用的矩阵函数∑∞==0!k kAk A e ()()120!121sin +∞=∑+-=k k kAk A ()()kk k Ak A 20!21cos ∑∞=-=()()()10111ln +∞=∑+-=+k K kAk A 矩阵函数值的计算方法:1、Hamilton-cayley 定理或零化多项式进行求解2、Jordan 分解:()100-∞=∞=⎪⎭⎫⎝⎛==∑∑P J a P A a A f k k k k kk ()()()100-∞=∞=⎪⎭⎫⎝⎛==∑∑P Jt a P At a At f K k k k kk 3、待定系数法矩阵函数()A f 的特征值对应()i f λ5、矩阵的特征值界的估计∞≤m A λ()∞+≤m HA A 5.0ReλHA A -≤5.0Im λ矩阵特征值的分布区域:圆盘定理,行和列盖尔圆特征值的隔离()~1ii ii R R a z αα-+≤-()x R max 1=λ,()x R n min =λ6、广义逆矩阵P l l l I Q X r ⎥⎦⎤⎢⎣⎡=222112{1}广义逆的求法⎥⎦⎤⎢⎣⎡0nm I I A 初等变换→⎪⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫ ⎝⎛0000Q P I r。
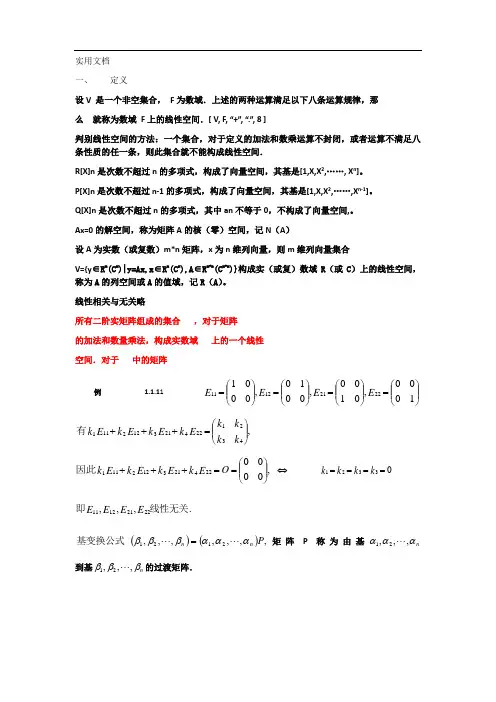
一、定义设V 是一个非空集合, F 为数域.上述的两种运算满足以下八条运算规律,那 么 就称为数域 F 上的线性空间.[ V, F, “+”, “.”, 8 ]判别线性空间的方法:一个集合,对于定义的加法和数乘运算不封闭,或者运算不满足八条性质的任一条,则此集合就不能构成线性空间.R[X]n 是次数不超过n 的多项式,构成了向量空间,其基是[1,X,X 2,……, X n ]。
P[X]n 是次数不超过n-1的多项式,构成了向量空间,其基是[1,X,X 2,……,X n-1]。
Q[X]n 是次数不超过n 的多项式,其中an 不等于0,不构成了向量空间,。
Ax=0的解空间,称为矩阵A 的核(零)空间,记N (A )设A 为实数(或复数)m*n 矩阵,x 为n 维列向量,则m 维列向量集合V={y ∈R m (C m )|y=Ax,x ∈R n (C n ),A ∈R m*n (C m*n)}构成实(或复)数域R (或C )上的线性空间,称为A 的列空间或A 的值域,记R (A )。
线性相关与无关略所有二阶实矩阵组成的集合 ,对于矩阵的加法和数量乘法,构成实数域 上的一个线性空间.对于 中的矩阵例 1.1.11⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=1000,0100,0010,000122211211E E E E ,4321224213122111⎪⎪⎭⎫⎝⎛=+++k k k k E k E k E k E k 有,0000 224213122111⎪⎪⎭⎫⎝⎛==+++O E k E k E k E k 因此 03321====⇔k k k k .,,,22211211线性无关即E E E E()(),,,,,,, 2121P n n αααβββ =基变换公式矩阵P 称为由基n ααα,,,21到基n βββ,,,21 的过渡矩阵.坐标变换公式 ,'''2121⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x P x x x 例1.2.6略P11设V l ,V 2是线性空间V 的两个子空间, 可以验证: 21V V 构成V 的线性子空间.称为 21V V 为V l 与 V 2 的交空间.可以验证: 21V V + 构成V 的线性子空间.称21V V +为 V l 与 V 2 的和空间例1.3.5◆{}{}2122112121,span ,,span ,1,3,5,1,1,3,5,4,1,31,1,131,2ββααββαα==-=-=--==V V T TT T )()(),(),,(试求;(1)V l +V 2的基与维数;(2) 21V V 的基与维数● [解] (1)由定理3知{}212121,,,span ββαα=+V V 121,,βαα是极大无关组.故它是V 1+V 2的基,维数=3,于是且,即)设(21212V V V V ∈∈∈ααα 24132211ββαααk k k k +=+=把2121,,,ββαα的坐标代入上式,解之得4342132,35,0k k k k k -===于是. 35,5,35,35214的向量表示为V V k T⎪⎭⎫ ⎝⎛--=α其维数=l线性映射:设V1,V2是数域F 上的两个线性空间,映射T :V1->V2,如果对于任何两个向量a1,a2∈V1和任何数K∈F,都有T (a1+a2)=T(a1)+T(a2);T (Ka1)=KT(a1)便称为映射。
矩阵分析复习第一章线性空间与线性变换一、线性空间1.线性空间:设V 是一个非空集合。
如果V 满足:(I)在V 中定义一个“加法”运算,即当V y x ,时,有唯一的和V y x (封闭性),且加法运算满足下列性质: (1)结合律z y x z y x )()(; (2)交换律x y y x ;(3)零元律O V ,称为零元, x V 有x O x ; (4)负元律x V , y V 称为x 的负元,使O y x 。
(II)在V 中定义一个“数乘”运算,即当K k V x ,时,有唯一的V kx (封闭性),且数乘运算满足下列性质: (5)数因子分配律ky kx y x k )(; (6)分配律lx kx x l k )(; (7)结合律x kl lx k )()( ;(8)恒等律x x 1;[数域中一定有1]2.线性空间的基与维数基:设V 是数域K 上的线性空间,)1(,,21 r x x x r 是属于V 的r 个任意元素,如果它满足(1)r x x x ,,21 线性无关;(2)V 中任一向量x 均可由r x x x ,,21 线性表示。
则称r x x x ,,21 为V 的一个基。
维数:基中的元素个数称为V 的维数,记为V dim 。
3.坐标:称线性空间n V 的一个基n x x x ,,21 为nV 的一个坐标系,nV x ,它在该基下的线性表示为:),2,1,,(1n i V x K x ni i ni ii则称n ,,21 为x 在该坐标系中的坐标或分量,记为Tn ),,(214.基变换与坐标变换:设n x x x ,,21 及n y y y ,,21 是nV 的两组基,),2,1(1n i x cy ni iij j即C x x x c c c c c c c c c x x x y y y n nn n n n n n n ,,,,,,212122221112112121其中C 称为过渡矩阵。
矩阵知识点归纳及例题一、矩阵知识点归纳。
(一)矩阵的定义。
1. 矩阵的概念。
- 由m× n个数a_ij(i = 1,2,·s,m;j = 1,2,·s,n)排成的m行n列的数表(a_11a_12·sa_1n a_21a_22·sa_2n ⋮⋮⋱⋮ a_m1a_m2·sa_mn)称为m× n矩阵,简称矩阵,其中a_ij称为矩阵的第i行第j列的元素。
2. 特殊矩阵。
- 零矩阵:所有元素都为0的矩阵,记为O。
- 方阵:行数与列数相等的矩阵,即m = n时的矩阵A称为n阶方阵。
- 对角矩阵:除主对角线元素外,其余元素都为0的方阵,即a_ij=0(i≠ j)的n 阶方阵(a_110·s0 0a_22·s0 ⋮⋮⋱⋮ 00·sa_nn)。
- 单位矩阵:主对角线元素都为1,其余元素都为0的n阶方阵,记为I或E,即(10·s0 01·s0 ⋮⋮⋱⋮ 00·s1)。
(二)矩阵的运算。
1. 矩阵的加法。
- 设A=(a_ij)和B=(b_ij)是两个m× n矩阵,则A + B=(a_ij+b_ij),即对应元素相加。
- 矩阵加法满足交换律A + B=B + A和结合律(A + B)+C = A+(B + C)。
2. 矩阵的数乘。
- 设A=(a_ij)是m× n矩阵,k是一个数,则kA=(ka_ij),即矩阵的每个元素都乘以k。
- 数乘满足分配律k(A + B)=kA + kB和(k + l)A=kA + lA(k、l为常数)。
3. 矩阵的乘法。
- 设A=(a_ij)是m× s矩阵,B=(b_ij)是s× n矩阵,则AB是m× n矩阵,其中(AB)_ij=∑_k = 1^sa_ikb_kj。
- 矩阵乘法一般不满足交换律,即AB≠ BA(在A、B可乘的情况下),但满足结合律(AB)C = A(BC)和分配律A(B + C)=AB + AC,(A + B)C = AC+BC。
矩阵知识点总结框架
引言
-介绍矩阵的定义和基本概念
-解释矩阵在数学和其他领域中的重要性
第一部分:矩阵的基本概念
-介绍矩阵的定义和符号表示方法
-讨论矩阵的行数和列数
-解释矩阵的元素和主对角线
-说明特殊类型的矩阵,如方阵、对称矩阵和零矩阵
第二部分:矩阵的运算
-介绍矩阵的加法和减法
-讨论矩阵的数乘和矩阵的乘法
-解释矩阵的转置和逆矩阵
-说明矩阵的秩和行列式
-讨论矩阵的特征值和特征向量
第三部分:矩阵的应用
-介绍矩阵在线性代数中的应用
-讨论矩阵在几何学中的应用,如变换和投影
-解释矩阵在物理学和工程学中的应用,如方程组和电路分析 -说明矩阵在计算机图形学中的应用,如图像处理和三维动画第四部分:矩阵的高级概念
-介绍矩阵的奇异值分解(SVD)和特征分解
-讨论矩阵的广义逆和广义特征值
-解释矩阵的正定性和半正定性
-说明矩阵的范数和条件数
结论
-总结矩阵的基本概念、运算和应用
-强调矩阵在数学和其他领域中的重要性 -展望矩阵理论在未来的发展和应用前景。
矩阵总复习知识点梳理(学生)矩阵总复知识点梳理(学生)一、基础概念- 矩阵定义:矩阵是由数个数排成的矩形阵列,形如$$A=[a_{ij}]_{m\times n}$$。
- 矩阵元素:矩阵中的每个数称为矩阵的元素或元。
- 矩阵的行列数:矩阵A的行数为m,列数为n,记作A(m×n)。
- 矩阵的相等:两个矩阵A和B相等,当且仅当它们的行数、列数相等,并且对应元素相等。
- 矩阵的转置:把矩阵的行变成同序数的列,列变成同序数的行,得到的新矩阵叫作矩阵A的转置矩阵,记作A^T。
- 矩阵的乘法:两个矩阵A(m×n)和B(n×p)的乘积是一个矩阵C(m×p),其中C的每个元素$$c_{ij}=\sum_{k=1}^na_{ik}b_{kj}$$。
- 单位矩阵:对角线上元素都为1,其它元素都为0的矩阵叫作单位矩阵,记作E。
- 零矩阵:所有元素都为0的矩阵叫作零矩阵,记作O。
二、矩阵运算- 矩阵的加法:两个矩阵A和B相加,得到的矩阵C(m×n)每个元素等于对应位置的元素相加。
- 矩阵的减法:两个矩阵A和B相减,得到的矩阵C(m×n)每个元素等于对应位置的元素相减。
- 矩阵的数乘:矩阵A的每个元素乘以数k得到的矩阵C(m×n)每个元素等于对应位置的元素乘以k。
三、矩阵求逆- 可逆矩阵:一个n阶矩阵A如果存在一个n阶矩阵B,使得AB=BA=I,其中I是单位矩阵,那么矩阵A叫作可逆矩阵,矩阵B 叫作矩阵A的逆矩阵,记作A^{-1}。
- 矩阵求逆的条件:矩阵A可逆的充分必要条件是|A|≠0。
- 矩阵求逆的方法:高斯-约当消元法、伴随矩阵法、初等变换法等。
- 矩阵的逆的性质:若A、B均为可逆矩阵,则AB也可逆,且(AB)^{-1}=B^{-1}A^{-1}。
四、矩阵的特殊类型- 对称矩阵:如果一个n阶矩阵A满足A=A^T,那么矩阵A叫作对称矩阵。
- 反对称矩阵:如果一个n阶矩阵A满足A=-A^T,那么矩阵A叫作反对称矩阵。
矩阵知识点总结大纲一、矩阵的基本概念1.1 矩阵的定义1.2 矩阵的元素1.3 矩阵的维数1.4 矩阵的转置1.5 矩阵的特殊矩阵二、矩阵运算2.1 矩阵的加法2.2 矩阵的数乘2.3 矩阵的乘法2.4 矩阵的转置2.5 矩阵的幂2.6 矩阵的逆2.7 矩阵的行列式2.8 矩阵的秩三、线性方程组与矩阵3.1 矩阵的行简化阶梯形式3.2 矩阵的列简化阶梯形式3.3 矩阵的增广矩阵3.4 矩阵的系数矩阵3.5 矩阵的齐次线性方程组3.6 矩阵的非齐次线性方程组四、矩阵的应用4.1 线性代数4.2 计算机图形学4.3 信号处理4.4 优化问题4.5 统计学4.6 量子力学五、矩阵分析5.1 矩阵的迹5.2 矩阵的本征值与本征向量5.3 矩阵的相似矩阵5.4 矩阵的对角化5.5 矩阵的奇异值分解5.6 矩阵的正交矩阵六、矩阵的特征6.1 矩阵的周期性6.2 矩阵的稀疏性6.3 矩阵的对称性6.4 矩阵的正定性6.5 矩阵的随机性七、矩阵的发展历程7.1 矩阵的起源7.2 矩阵的发展7.3 矩阵的应用八、矩阵的未来发展8.1 矩阵的应用领域拓展8.2 矩阵的理论深化8.3 矩阵的计算方法改进九、矩阵的教学与研究9.1 矩阵的教学模式9.2 矩阵的教学资源9.3 矩阵的研究方向十、矩阵的未来前景10.1 矩阵的应用前景10.2 矩阵的教学前景10.3 矩阵的研究前景十一、矩阵的总结与展望11.1 矩阵的总结11.2 矩阵的展望结语矩阵知识点总结一、矩阵的基本概念1.1 矩阵的定义矩阵是一个按照长方形排列的数表。
其中的元素可以是数字、符号或数学式。
矩阵是线性代数的基本概念,应用非常广泛,涉及几何学、概率论、微分方程以及物理学和工程学等各个学科。
1.2 矩阵的元素矩阵的元素是矩阵中的一个具体数值或符号。
1.3 矩阵的维数一个矩阵的维数是指矩阵的行数与列数。
如果一个矩阵有m行n列,则称其为m×n阶矩阵。