Hyperion Planning and Consolidation solution overview v2
- 格式:pptx
- 大小:7.65 MB
- 文档页数:31


Integrated Planning and Control for Convex-bodied Nonholonomic systems using Local Feedback Control Policies David C.Conner,Alfred A.Rizzi,and Howie ChosetCMU-RI-TR-06-34August2006Robotics InstituteCarnegie Mellon UniversityPittsburgh,Pennsylvania15213c2006Carnegie Mellon UniversityAbstractWe present a method for defining a hybrid control system capable of simultaneously addressing the global navigation and control problem for a convex-bodied wheeled mobile robot navigating amongst obsta-cles.The method uses parameterized continuous local feedback control policies that ensure safe operationover local regions of the free configuration space;each local policy is designed to respect nonholonomicconstraints,bounds on velocities(inputs),and obstacles in the environment.The hybrid control systemmakes use of a collection of these local control policies in concert with discrete planning tools in order toplan,and replan in the face of changing conditions,while preserving the safety and convergence guaran-tees of the underlying control policies.In this paper,we provide details of the system models and policydefinitions used to validate the approach in simulation and experiment with a convex-bodied wheeled mo-bile robot.This work is one of thefirst that combines formal planning with continuous feedback controlguarantees for systems subject to nonholonomic constraints,input bounds,and non-trivial body shape.c2006Carnegie Mellon iContents1Introduction1 2Related Work32.1Motion Planning and Control with Nonholonomic Constraints (3)2.2Sequential Composition (4)3General Framework73.1System Models (7)3.2Generic Policy Requirements (8)3.2.1Simple Inclusion Tests (8)3.2.2Contained in Free Space (9)3.2.3Conditionally Positive Invariant (10)3.2.4Finite Time Convergence (10)3.3Discrete Planning in Space of Policies (11)3.3.1Extensions to Prepares Definition (11)3.3.2Planning in Policy Space (12)4Local Policy Definitions154.1Inclusion Test (18)4.2Free Configuration Space Test (18)4.3Conditional Invariance Test (19)4.4Vector Field Definition and Convergence Test (20)5Policy Deployment Technique23 6Current Results276.1Robot System and Implementation (27)6.2Navigation Experiments (29)6.3Task Level Planning Simulations (30)7Conclusion33 A Free Space Testing37 References41c2006Carnegie Mellon iii1IntroductionThe problem of simultaneously planning and controlling the motion of a convex-bodied wheeled mobile robot in a cluttered planar environment is challenging because of the relationships among control,nonholo-nomic constraints,and obstacle avoidance.The objective is to move the robot through its environment such that it arrives at a designated goal set without coming into contact with any obstacle,while respecting the nonholonomic constraints and velocity(input)bounds inherent in the system.Conventional approaches addressing this problem typically decouple navigation and control[12,31,33]. First,a plannerfinds a path,and then a feedback control strategy attempts to follow that path.Often the methods assume a point or circular robot body;other non-trivial robot body shapes complicate the problem offinding a safe path,as the path must be planned in the free configuration space of the robot.This leaves the challenging problem of designing a control law that converges to the one-dimensional path,while remaining safe with respect to obstacles.We address the coupled navigation and control problem by generating a vectorfield along which the robot can“flow.”Unfortunately,determining a global vectorfield that satisfies all of these objectives for constrained systems can be quite difficult.Our approach,inspired by the idea of sequential composition[11], uses a collection of local feedback control policies coupled with a switching strategy to generate the vector fiposing these relatively simple policies induces a piecewise continuous vectorfield over the union of the policy domains.A policy is specified by a configuration dependent vectorfield defined over a local region of the robot’s free configuration space,termed a cell.From this vectorfield and knowledge of the current robot state,the control inputs are determined such that the closed-loop dynamicsflows to the specified policy goal set within the cell.Figure1shows four paths induced by invoking the local policies for four different initial conditions in the robot experiments,as will be discussed in Section6.Figure1:Experimental results of four robot runs using the proposed hybrid control framework.An explicit desired path is never calculated,the path is induced by sequentially chaining local feedback control policies together;the policy ordering is determined by a discrete planner.The induced path preserves the local guarantees of the local polices,and is thus free of collision while respecting the system constraints.c2006Carnegie Mellon1A discrete transition relation represented by a graph is induced by the transition between the domain of one policy to the domain of a second policy containing the policy goal set of thefirst.On-line planning,and re-planning under changing conditions,becomes more tractable on the graph,allowing us to bring numerous discrete planning tools to bear on this essentially continuous problem.By sequencing the local policies according to the ordering determined by a discrete planner,the closed loop dynamics induce the discrete transitions desired by the discrete plan.The overall hybrid(switched)control policy responds to system perturbations without the need for re-planning.In the face of changing environmental conditions,the discrete graph allows for fast online re-planning,while continuing to respect the system constraints.By coupling planning and control in this way,the hybrid control system plans in the discrete space of control policies;thus,the approach represents a departure from conventional techniques.A“thin”path or trajectory is never explicitly planned;instead,the trajectory induced by the closed-loop dynamicsflows along the vectorfield defined by the active policy,which is chosen according to an ordering determined by a discrete planner.A plan over the discrete graph associated with the collection of policies corresponds to a“thick”set of configurations within the domains of the associated local policies.This approach offers guaranteed convergence over the union of the local policy domains.For the method to be complete,the entire free configuration space must be covered by policy domains(cells).This is a difficult problem due to the multiple constraints on the robot dynamics.Herein,the focus is on deploying a “rich enough”collection of policies that enables the navigation problem to be addressed over the bulk of the free configuration space.This paper describes the basic requirements that any local policy must satisfy to be deployed in this framework;each local policy must be provably safe with respect to obstacles and guarantee convergence to a specified policy goal set,while obeying the system constraints within its local domain.We develop a set of generic policies that meet these requirements,and instantiate these generic policies in the robot’s free configuration space.The underlying equations are detailed,and examples are provided.Finally,a concrete demonstration of controlling a real mobile robot using a collection of local policies is described.2c2006Carnegie Mellon2Related WorkThe approach advocated in this paper maintains the coupling between planning and control,unlike con-ventional approaches that decouple the problem into a path planning problem and a path-following control problem.This section presents a brief overview of conventional approaches,and concludes with a discussion of the sequential composition approach that motivates this work.2.1Motion Planning and Control with Nonholonomic ConstraintsThe control of systems with nonholonomic differential constraints is more complex than control of purely holonomic1systems.This section contains an overview of techniques used to plan paths and trajectories for nonholonomic systems,and address four basic control problems for nonholonomic systems–stabilization, path-following,trajectory-tracking,and point-to-point steering[18,30,43].The discussions give insight into the difficulties associated with nonholonomic motion planning and control.For a more thorough discussion and reference list,refer to[30,32,33].To recognize the complexity introduced by nonholonomic constraints,consider the“simple”problem of stabilizing a system about a given equilibrium point.Brockett’s theorem provides necessary conditions for the existence of a smooth,time-invariant feedback control law that stabilizes the system about the given point[10].It is well known that many nonholonomic systems,although small-time locally controllable,fail Brockett’s test[30,43].This precludes the use of conventional feedback control based on potential functions. Several classes of stabilizing feedback control policies have been developed:discontinuous time invariant, time varying,and hybrid control policies[30].Given the complexity of this control task,it is no surprise that the coupled navigation and control task is more complex than for holonomic systems.Many approaches addressing the coupled navigation and control problem for nonholonomic systems de-compose the problem into a motion planning problem,followed by a control problem.A common planning approach is to pretend the system is holonomic and hope for the best.In the holonomic case,the path or tra-jectory can be planned using any of a number of methods[12,35].Grid-based search algorithms are popular in path planning,as are roadmap methods such as V oronoi diagrams.Potential function methods,while not necessarily complete,are also widely used in path/trajectory planning.Given a path through the environment,a path-following algorithm is then used to converge to the desired path.There are two basic formulations to path-following.In thefirst,a designated point on the robot traces a given path in the workspace,without concern for orientation[15].This may fail in cluttered environments as the designated point may exactly follow a safe path,yet still allow the system to collide with an obstacle at another point on the robot body.The second formulation attempts to track position and orientation of a path in the free configuration space[17].If the environment is not overly cluttered,so that deviations are not catastrophic,path following may work well.In fact,if a system is small-time locally controllable,any continuous path can be approximated arbitrarily well[34].Unfortunately,the methods used to control the system along arbitrary paths often lead to highly oscillatory motions that require great control effort.If the path does not respect the system constraints, the resulting motions may require an inordinate number of reversals to follow the desired path.One approach to address this problem is to plan a path without regard to nonholonomic constraints,and perturb the path to respect nonholonomic constraints[51].Techniques that consider the nonholonomic constraints during planning typically use only a discrete set of feasible motions.The shortest feasible path(SFP)metric is used to plan paths that approximate a holonomic path using afinite number of motions[42].The motions are selected by choosing the shortest feasible path to a point on the holonomic path intersecting the largest ball defined by the SFP metric[56].Dynamic programming methods determine an optimal path for a discrete set of controls(e.g.hard left,soft left,straight,soft right,hard right)[3,21,36].Probabilistic roadmaps(PRM)and rapidly-exploring random trees(RRT)are other discrete approaches to determining feasible paths for nonholonomically constrained systems[37,54].With the exception of dynamic programming,these discrete methods are not feedback based,and require replanning if the system deviates from the desired path.Even if the planned path respects the nonholonomic constraints,the path must be followed by the robot. The presence of nonholonomic constraints renders path-following a non-linear controls problem.Control laws based on a Lyapunov analysis[17]or feedback linearization[18,50]are common.Most path-following algorithms assume continuous motion,with a non-stationary path defined for all time.This(temporarily) avoids Brockett’s problem with stabilization to a point[15,17].The path-following control policy asymptot-ically brings the error between the desired path and the actual path to zero.Typically,the control policy is constructed for a specific vehicle and class of paths[2,17,15,55].The path-following control laws are unaware of environmental obstacles;therefore,for a nonzero initial error or perturbation during motion,the system may collide with an obstacle.Path-following may be coupled with local obstacle avoidance,but this may invalidate the convergence guarantees.Thus,if the errors are large enough,the paths must be replanned,starting from the current location.In addition to path-planning,trajectories that specify when the system arrives at points along the path may be planned[17,50].Trajectory-tracking problems can be problematic if the system is subject to a constraint that delays the tracking[17].In this case,the accumulated error may make the system unstable or require unreasonably high inputs.Another possible problem is that trajectory-tracking controls may switch directions for certain initial conditions[50].Unless the time matching along the trajectory is crucial,path-following is often a better formulation[17,50].In related work,several methods–including sinusoidal inputs,piecewise constant inputs,optimal control, and differentiallyflat inputs–solve the point-to-point steering problem between two positions using open loop controls[34,43].These methods are sometimes incorporated into the discrete planning systems.Each of these methods is an open loop control method that does not respect obstacles.Collision detection must be performed after the path is found to determine feasibility in a cluttered environment[27].These point-to-point steering methods are strictly open loop,and not suitable for feedback control.The inevitable errors necessitate repeated applications to induce convergence to the goal point.There have been a few attempts to address the coupled navigation and control problem for nonholonomic systems.A method based on potentialfields uses resistive networks to approximate the nonholonomic con-straints[14].This approach requires a discretization of the configuration space,and is therefore subject to numerical difficulties when calculating derivatives necessary for feedback control.Other approaches define integral sub-manifolds in configuration space that contain the goal[25,29,41].On the sub-manifold,the nonholonomic constraints are integrable,and the control naturally respects the constraints.The approaches drive the system to the sub-manifold,and then along the sub-manifold to the goal.While these methods are suitable for feedback control implementations,determination of a suitable manifold is sometimes difficult. For systems where the stable manifold is not given in closed form,an iterative process is used to approximate the manifold.The approaches also involve designing several functions that require insight into the specific problem and system constraints.2.2Sequential CompositionThe research presented in this paper uses the technique of sequential composition,which enables the con-struction of switched control policies with guaranteed behavior and provable convergence properties[11].The original form of sequential composition uses state regulating feedback control policies,whose do-mains of attraction partition the state space into cells[11].The control policy can be thought of as a funnel, as shown in Figure2,where the vertical represents the value of a Lyapunov function,and the domain is the 4c2006Carnegie MellonFigure2:An idealized Lyapunov function and its associated domain of attraction rep-resented by its shadow on the state space. The goal point is shown as a large dot within thedomain.Figure3:Composition of control policies leads to an enlarged domain of attraction.Note that the active policy switches to the highest priority policy as soon as the state enters its domain.“shadow”cast by the funnel on the state space below[11].The domain is the safe domain of attraction, which is the largest positive invariant region that does not intersect an obstacleThe basic idea behind sequential composition is to compose multiple control policies in a way that enlarges the overall domain of attraction,while preserving the underlying convergence guarantees.The approach specifies the goal of one policy to lie within the domain of another policy.By properly prioritizing the policies,and switching to a higher priority policy once the state enters the domain of the higher priority policy,it is possible to construct a switching control policy with a larger domain of attraction than any single policy[11].The domain of attraction of the switched policy is equal to the union of the domains of the component policies,as shown in Figure3.By composing policies with limited domains,constraints in the state space can be respected while building an almost globally convergent control policy.In this way,the free state space may be covered by incrementally covering an additional region of the free state space.The policy composition is based on a formal notion of prepares[11].For a given control policy,, denote the domain of the policy and the goal.Given two control policies,is said to prepare,denoted,if.Let afinite collection of instantiated control policies, ,defined over the free state space of a given system be given,and assume at least one policy stabilizes the overall goal.The prepares relationship between any two policies in the collection induces a directed graph,,over the collection of instantiated control policies.In general the policy graph is cyclic;however,an acyclic graph,,may be generated over the collection of policies by searching the original graph breadthfirst,beginning at the node corresponding to the policy that stabilizes the overall goal, and adding only those links and nodes that connect back to previously visited nodes.The acyclic graph is a partial order over the collection of control policies.By construction,the partial order graph is a connected graph containing a node corresponding to the policy that stabilizes the goal.Given the collection of policies ,the switching strategy defined by the associated partial order induces an overall switching control policy, denoted.The union of the domains of the instantiated policies included in the partial order gives the domain of the overall policy;that is(1) c2006Carnegie Mellon5The overall control policy induced by sequential composition is fundamentally a hybrid control policy[6, 8,24].The composition of these local policies in a hybrid systems framework enables analysis on the discrete representation of the transitions between policy domains[8,11].We may analyze whether a goal node is reachable using the partial order graph,which functions as afinite state automata[24].Reachability of the goal state and decidability of the navigation problem for a particular collection of policies can be determined by the discrete transitions on,without analyzing the underlying continuous system[24].This analysis may be done prior to,or during,construction of the partial order.The stability of the underlying control policies guarantees the stability of the overall switched policy because the partial order results in monotonic switching[11].This obviates the need for complex hybrid sta-bility analysis of the form given in[5,7,16,38].Disturbances are robustly handled provided their magnitude and rate of occurrence is small compared to the convergence of the individual policies[11].The system in[11]uses multiple policies to demonstrate the inherent robustness of the technique.The deployment of the generic policies–including specification of the setpoints,control policy gains,and pol-icy ordering–is accomplished manually.The deployment uses conservative approximations of the policy domains obtained through experimentation and simulation.Sequential composition-like techniques have been applied to mobile robots.Many examples are for systems without nonholonomic constraints,where the policies are defined over simple cells–polytopes and balls–in configuration space[47,48,57].Other approaches have used optimal control techniques on discrete state space representations to encode local policies[9,22].Sequential composition has also been used to control wheeled mobile robots using visual servoing[28, 44].In these cases,the local control policies were designed based on careful analysis of the system,its constraints,and the problem at hand.These later approaches have the key feature that many of the individual policies are not designed to converge to a single point.In the later example,the“goal”of the highest priority policy is to drive through a doorway[44].It is assumed that another control policy becomes active after the vehicle passes through the doorway.This idea offlow-through policies inspired work where generic policies are defined over polytopes that partition the environment into local cells[13].This work was followed by similar approaches that used different methods of defining the control vectorfields over the polytopes[4,40].These methods were originally developed for idealized holonomic systems,but may be applied to point nonholonomic systems using feedback linearization[4].However,these approaches do not apply to systems with non-trivial body shapes,and cannot guarantee that the linearized system does not“cut a corner”between polytopes and collide with an obstacle.A key feature of these approaches is that the policies are generic,and are therefore amenable to automated deployment[4,13,40].These approaches also formed the base for later work in applying discrete planning techniques to specify logical constraints on the ordering of the local policies[19,20].Using the policy graph, ,a model checking system generates an open loop sequence of policies whose closed-loop behaviors satisfy the tasks specified in temporal logic.In addition to model checking,there has been substantial work in the problem of planning and replanning on discrete graphs.The D*algorithm,originally developed for grid based path planning,facilitates fast replanning based on changes in the graph cost structure[53].A similar,but algorithmically different version, called D*-lite has been applied to graph structures;including those,such as Markov Decision Processes (MDP),that support non-deterministic outcomes[39].6c2006Carnegie Mellon3General FrameworkThis section presents the framework used to address the navigation problem described in this paper.First,a brief overview of the robot modeling framework is given.Next,the generic requirements for the the local policies are presented.This section concludes with an overview of planning based on the discrete transition graph induced by the policies.3.1System ModelsThe robot system consists of a single body that navigates through a planar environment that is cluttered with obstacles.The planar environment,or workspace,is a bounded subset.Letdenote the position and orientation,relative to the world frame,of a reference frame attached to the robot body.As the robot moves through its workspace,evolves on the manifold.To address the navigation problem,the robot body must move along a path that reaches the overall goal, while avoiding obstacles along the way.Let denote the two-dimensional set of workspace points occupied by the body at position and orientation.The obstacles in the workspace are represented as the union over afinite set of convex regions.Thus,for all body positions and orientations,,along a collision free path,The robotic systems considered in this paper are driven by wheels in contact with the planar environment; the wheel-to-ground contact generates nonholonomic velocity constraints.The rotation of these wheels may be represented by internal shape variables[1].Thus,the robot configuration is fully specified as ,where denotes the shape variables.The shape variable velocities are controlled via control inputs.For kinematic systems,;for second-order dynamical systems.This paper is restricted to simple robot models where the nonholonomic constraints determine a linear mapping,, between velocities in the shape space and the velocity,,of the bodyfixed frame.The robot is induced to move along a path by application of the control inputs;the closed-loop dynamics determine the velocity via the mapping.The velocity determines the robot path.The control problem is to specify control inputs such that the system moves along a collision free path and reaches the overall goal.To be a valid control,the inputs must be chosen from the bounded input space.As bounded inputs and the mapping constrain,the navigation problem is tightly coupled to the control problem.To address the navigation and control problem in a coupled manner,we define local control policies over local regions of that are termed cells.Let denote the feedback control policy in a collection of policies and let denote the local cell.Define the cell in a subset of that locally represents the configuration space;the cells are restricted to compact,full dimensional subsets of without punctures or voids.It is assumed that the boundary of the cell,,has a well defined unit normal,, that exists almost everywhere.The policy goal set,denoted,is a designated region in the local cell; that is.In this framework,the coupled navigation and control problem of moving the robot body through the space of free positions and orientations of the bodyfixed frame is converted to a problem of specifying safe feedback control policies over the local cells,and then composing these local policies to address the larger navigation problem.Over each local cell,define a feedback control policy,where denotes the tangent bundle over the robot’s configuration space.In other words,the local policy maps the current robot state,whose configuration falls within the local cell,to an input in the bounded set of inputs associated with the policy.The policy must be designed such theflow of induced by entersc2006Carnegie Mellon7Figure4:A cell defines a local region in the space of robot body positions and orientations.In this example, the cell is funnel shaped and the designated goal set is the small opening at the point of the funnel..Thus,instead of a specific path,the closed-loop dynamics of the local policy induce a vectorfield flow over the cell that enters.3.2Generic Policy RequirementsFor a local policy to be useful in the sequential composition framework,it must have several properties.First, to be practical,the local policies must have efficient tests to see if a specific local policy can be safely used; that is the system must be able to determine if the current robot state is within the domain of a given policy. Second,to induce safe motion,the cell must be contained in the space of free body positions and orientations so that collision with any obstacle is not possible while the body frame is within this cell.Third,under the influence of the policy,the induced trajectories must reach the policy goal set defined within the local cell without departing the associated cell from any initial position and orientation within the cell.Finally,the system must reach the designated goal set infinite time for any initial condition within the cell.The requirements discussed below are generic with respect to the given robot model and any specific cell definition.The focus in the remainder of this section is on the generic policy requirements that enable the proposed hybrid control framework to work with a variety of system models.3.2.1Simple Inclusion TestsA given policy is safe to activate if the robot state is within the policy domain,.The domain,which depends upon the policy definition,generally specifies both configurations and velocities.As the policies are defined over,thefirst test of domain inclusion is that.For kinematic systems, because the state is simply the configuration.Therefore,only the cell inclusion test is needed to check to see if a policy is safe to activate for the simple models considered in this paper.8c2006Carnegie Mellon。
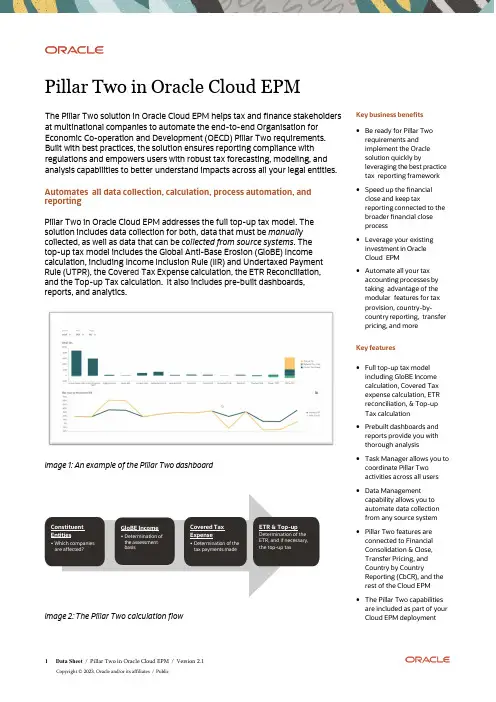
Constituent Entities •Which companies are affected? GloBE Income•Determination ofthe assessmentbasisCovered TaxExpense•Determination of thetax payments madeETR & Top-upDetermination of theETR, and if necessary,the top-up taxPillar Two in Oracle Cloud EPMThe Pillar Two solution in Oracle Cloud EPM helps tax and finance stakeholders at multinational companies to automate the end-to-end Organisation for Economic Co-operation and Development (OECD) Pillar Two requirements. Built with best practices, the solution ensures reporting compliance with regulations and empowers users with robust tax forecasting, modeling, and analysis capabilities to better understand impacts across all your legal entities.Automates all data collection, calculation, process automation, and reportingPillar Two in Oracle Cloud EPM addresses the full top-up tax model. The solution includes data collection for both, data that must be manually collected, as well as data that can be collected from source systems. Thetop-up tax model includes the Global Anti-Base Erosion (GloBE) Income calculation, including Income Inclusion Rule (IIR) and Undertaxed Payment Rule (UTPR), the Cover ed Tax Expense calculation, the ETR Reconciliation,and the Top-up Tax calculation. It also includes pre-built dashboards, reports, and analytics.Image 1: An example of the Pillar Two dashboardImage 2: The Pillar Two calculation flow Key business benefitsBe ready for Pillar Two requirements andimplement the Oraclesolution quickly byleveraging the best practice tax reporting framework Speed up the financialclose and keep taxreporting connected to thebroader financial closeprocessLeverage your existing investment in OracleCloud EPMAutomate all your taxaccounting processes bytaking advantage of themodular features for taxprovision, country-by-country reporting, transferpricing, and moreKey featuresFull top-up tax modelincluding GloBE Incomecalculation, Covered Taxexpense calculation, ETRreconciliation, & Top-upTax calculationPrebuilt dashboards and reports provide you withthorough analysisTask Manager allows you to coordinate Pillar Twoactivities across all usersData Managementcapability allows you toautomate data collectionfrom any source systemPillar Two features areconnected to FinancialConsolidation & Close,Transfer Pricing, andCountry by CountryReporting (CbCR), and therest of the Cloud EPMThe Pillar Two capabilities are included as part of yourCloud EPM deploymentBest practices are built-in to Oracle Cloud EPM and designed to work with your cloud and on-premises systems as well. For example, it works withboth Financial Consolidation and Close in Oracle Cloud EPM as well as on-premises Hyperion Financial Management (HFM). This allows you to leverage your existing investments, but quickly address the Pillar Two requirements in a robust, auditable process.Automate data collection from any source systemPillar Two data requirements go beyond the general ledger. The data required will be sourced from various system such as the financial consolidation system, tax provision, ERP and sub-ledgers, HR systems, sales systems, etc. Using the standard Data Management capabilities in Oracle Cloud EPM, tax departments can automatically collect the data from these source systems and transform it to the needs of the Pillar Two data model. Importantly, this ensures a strong audit trail, and enables tax resources to spend more time on data analysis and waste less time collecting data. Any data that cannot be easily automated, can be manually entered into the best practice Pillar Two Input screens within Oracle Cloud EPM.Ensure process collaboration across the enterpriseThe Pillar Two process will require coordination of activities from colleagues across tax, finance, and other operational parts of the enterprise. To this end, Oracle Cloud EPM includes an easy-to-deploy Task Manager to ensure seamless coordination and collaboration across the entire process. Tasks can be assigned and monitored from a central dashboard. End users are provided a simple step-by-step process flow to guide them through their Pillar Two responsibilities. This allows you to minimize the impact of the new requirements across the enterprise to ensure that the Pillar Two process runs as smoothly as possibleTax forecasting & modeling for Pillar Two impactsPillar Two represents a major change to tax process and tax planning strategies. One of the core benefits of the Pillar Two solution in Oracle Cloud EPM is the ability to forecast and model the future impacts of the new requirements. In addition to the world-class calculation and reporting capabilities tax users can copy Pillar Two data to forecast scenarios for end-to-end modeling. This allows tax power users to change assumptions that could have material impact on the outcome. This ensures that your tax function can best prepare the enterprise for the new realities of the global minimum tax. Are you Pillar Two ready? If not, Oracle Cloud EPM can help fast!The Pillar Two module in Oracle Cloud EPM has best practices built in. This allows you to get up and running very quickly. While the module is part-and-parcel of the Oracle Cloud EPM, it is built in a manner that allows the tax department to deploy it without impacting other existing financial processes. This gives tax stakeholders the independence they need, but still allows for the synergy of data and process with other cloud or on-Premises financial processes – such as HFM or Financial Close and Consolidation (FCC). Be prepared for Pillar Two. Empower your tax department today by simply launching the Pillar Two capabilities in Oracle Cloud EPMConnect with usCall +1.800.ORACLE1 or visit . Outside North America, find your local office at: /contact. /oracle /oracleCopyright © 2023, Oracle and/or its affiliates. All rights reserved. This document is provided for information purposes only, and the contents hereof are subject to change without notice. This document is not warranted to be error-free, nor subject to any other warranties or conditions, whether expressed orally or implied in law, including implied warranties and conditions of merchantability or fitness for a particular purpose. We specifically disclaim any liability with respect to this document, and no contractual obligations are formed either directly or indirectly by this document. This document may not be reproduced or transmitted in any form or by any means, electronic or mechanical, for any purpose, without our prior written permission.This device has not been authorized as required by the rules of the Federal Communications Commission. This device is not, and may not be, offered for sale or lease, or sold or leased, until authorization is obtained. Oracle and Java are registered trademarks of Oracle and/or its affiliates. Other names may be trademarks of their respective owners.Intel and Intel Xeon are trademarks or registered trademarks of Intel Corporation. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. AMD, Opteron, the AMD logo, and the AMD Opteron logo are trademarks or registered trademarks of Advanced Micro Devices. UNIX is a registered trademark of The Open Group. 0120Disclaimer: If you are unsure whether your data sheet needs a disclaimer, read the revenue recognition policy. If you have further questions about your content and the disclaimer requirements, e-mail ********************.。
ORACLE HYPERION FINANCIAL CLOSE MANAGEMENTORACLE’S FINANCIAL CLOSE MANAGEMENT SOLUTION IS THE FIRST OF ITS KIND – A FINANCIAL CLOSE MANAGEMENT SOLUTION THAT SPANS THE EXTENDED FINANCIAL CLOSE CYCLEFEATURES•Web-Based Task Scheduling •Pre-built dashboards •Active Calendars•Task automationBENEFITS•Process consistency •Improved control•Clear communication•Easy to identify bottlenecks The Oracle Hyperion Financial Close Management application is built for centralized, web-based management of period-end close activities across the extended financial close cycle. The first application of its kind, Oracle Hyperion Financial Close Management will help manage all financial close cycle tasks including ledger and sub-ledger close, data loading and mapping, financial consolidation, reconciliation, tax/treasury and internal and external reporting processes – any task associated with the extended financial close.Get Control of the Extended Financial CloseMost companies manage the extended financial close process using offline spreadsheets, emails and phone calls. This is cumbersome and time-consuming and can often slow the financial close and make it more error-prone. Another challenge is the wide diversity of the tasks themselves - the financial close can mean different things to different people. To a divisional controller it may mean closing out the sub-ledgers and general ledger at month end or quarter end and submitting the results to corporate. To a headquarters accountant the financial close is about collecting the details from the divisions, making final adjustments and performing the corporate financial consolidation and reporting. And, to the CFO and other finance executives it’s about finalizing the results, announcing earnings and creating 10Q/10K’s and other regulatory filings for the SEC and other stakeholders. The extended financial close and reporting process is all of the tasks and processes from closing out the sub-ledgers to creating and delivering financial filings to the SEC and other regulatory bodies – which involves many systems, departments and individuals. This process is very complex to manage and too important to control using “hope and email.”Ultimately, without a centralized approach to task management, it becomes more difficult to deliver results quickly to both internal and external stakeholders – while ensuring compliance, auditability and accuracy. And, without an automated system for coordinating and tracking the entire process, identifying bottlenecks and areas for potential improvement, it’s very difficult to shave time from the extended close and reporting process.Example of the Extended Financial Close CycleKey FeaturesFunctionality includes:•An easy to use task scheduling and management feature to ensure the correct prioritization of closing tasks.•Pre-built, web-based dashboards for monitoring the progress of the financial close. Common calendar views, task list views, and Gantt views are leveraged for each user’s tasks based on security.•Active calendars and task lists that allow you to launch applications to complete tasks from the calendar itself.•An automation feature – allows you to schedule tasks for lights-out processing.• A roll-forward feature that allows you to quickly set up new financial close calendars based on the prior financial close.Tasks can be anything that needs to be done during the close process – whether in the transaction system, general ledger, consolidation system or reporting system. Employees are assigned to each task and the tasks are given a due date relative to each period end date so it’s also easy to identify bottlenecks in the process.Oracle Hyperion Financial Close Management Dashboard Summary With Oracle Hyperion Financial Close Management, companies can begin managing the financial close process proactively, rather than being surprised by failures in the process that can cause extensive delays. In addition, once bottlenecks and inefficient processes are made visible, they can be dealt with through process improvements and clear communication of objectives. Oracle Hyperion Financial Close Management can be the first step to a world-class financial close. Contact Us For more information about Oracle Hyperion Financial Close Management, please visit or call +1.800.ORACLE1 to speak to an Oracle representative. Copyright © March 2010, Oracle and/or its affiliates. All rights reserved. This document is provided for information purposes only and the contents hereof are subject to change without notice. This document is not warranted to be error-free, nor subject to any other warranties or conditions, whether expressed orally or implied in law, including implied warranties and conditions of merchantability or fitness for a particular purpose. We specifically disclaim any liability with respect to this document and no contractual obligations are formed either directly or indirectly by this document. This document may not be reproduced or transmitted in any form or by any means, electronic or mechanical, for any purpose, without our prior written permission. Oracle is a registered trademark of Oracle Corporation and/or its affiliates. Other names may be trademarks of their respective owners.ORACLE’SPERFORMANCE MANAGEMENTAPPLICATIONSOracle’s performance management applications comprise a modular suite of integrated applications that support a broad range of strategic and financialperformance management processes to enablemanagement excellence. Part of Oracle’s enterprise performance management system, theseapplications can be quickly deployed out of the box, extended with Oracle’s business intelligenceproduct family, or tailored to meet your organization's specific needs.RELATED PRODUCTS: Oracle’s performance management applications include the following products:Strategy Management SolutionsFinancial Close and Reporting Solutions• Oracle Hyperion Financial Management• Oracle HyperionDisclosure Management • Oracle Hyperion Financial Data Quality Management • Oracle Hyperion Analytics Link for Oracle Hyperion Financial Management • Oracle Hyperion Financial Reporting• Hyperion Enterprise Enterprise Business Planning Solutions Profitability and Cost Management Solutions Enterprise Dimension Management Solutions。
集团合并报表信息化现状、问题及对策分析作者:武钰钦来源:《财会学习》2020年第01期摘要:进入21世纪以后,我国经济快速增长。
在此过程中诞生了很多大型企业,这些大型企业定期披露合并报表是企业的一件大事,所以合并报表信息化迫在眉睫。
文章首先分析了目前大型企业合并报表编制的现状;其次分析了合并报表自动化将给企业带来的好处,再次分析了合并报表自动化在企业中应用存在的障碍;最后根据企业所处的宏微观情况,提出了一些对策,以期为大型企业的合并报表信息化提供参考。
关键词:合并报表系统;ERP一、引言为了能够更好掌握企业的财务及经营状况,企业管理者希望能够及时看到企业的财务报表。
对于央企、国企来说,需要按照国资委的要求每个月报送企业财务快报。
对于大型企业来说,财务人员每个月出一份合并财务报表工作量非常的大,而且其效率不能很好地满足集团管理的需求[1]。
对财务信息日益增长的需求与财务人员手工提供信息效率低的矛盾是普遍存在的。
目前市场上已经有一些ERP公司提供合并报表系统,但是这些系统在企业中的应用仍然存在一定的障碍,本文通过分析合并报表系统在集团中应用的现状以及存在的障碍,然后提出相应的对策,以期对集团合并报表信息化提供参考。
二、合并报表系统现状目前,在市场上具有代表性的合并报表系统有:SAP公司旗下的BPC(Business Planning and Consolidation)系统,该系统是企业的合并报表自动化以及预算管理自动化软件[2]。
BPC 软件的特点在于能够与SAP ERP进行很好的数据传输,使用该软件的代表性企业有:太平洋保险、中航国际等;海波龙HFM(Hyperion Financial Management,该软件专注于合并报表的解决方案,它不仅可以与甲骨文ERP进行很好的集成,还能与其他主流的ERP实现良好的数据集成,例如SAP ERP、金蝶、用友等。
已成功建成并投入使用该系统的代表性企业有华润万家、四川长虹等;还有一些ERP公司也开发了自身的合并报表系统,如用友公司的合并报表系统。
财务总监英文简历以下文章作者为您整理的财务总监英文简历(共含9篇),供大家阅读。
篇1:财务总监英文简历财务总监英文简历模板求职者惯用的求职方法是:看到职位信息后,通过email、寄信的方法发送简历,然后在家坐等消息,可往往一周过后仍然音讯全无。
很多条件不错者不禁纳闷:为何企业网络上还在不断招聘,我发的`简历却石沉大海?在求职竞争激烈的时代,聪慧人应当主动出击,顺藤摸瓜发掘信息。
有一位求职者懂得到心仪的企业正在招聘,但应聘者趋之若骛,自己的简历很难脱颖而出,于是除了利用惯例道路发送简历外,还登陆企业主页获取了企业HR 的邮箱,通过114查询获取企业总机号码,进而得知HR部门分机、招聘负责人姓名以及电话号码等。
然后通过致电HR或者快递简历的方法,引起HR的注意,让简历顺利交到HR的手中。
以下是yjbys作者和大家分享的财务总监英文简历模板,更多内容请访问()。
Name: yjbys gender : male Birth : # telephone : Degree : Bachelor Professional: International Finance Experience : 10years national : Han School: University of # address : # E-mail : Self Assessment :Almost 16 years cross-cultural working experience related to accounting, finance and auditing area.Strong ERP system design background and knowledge of large database, sufficient experience in using different manufacture and service MIS.Sufficient experience with US GAAP , SEC 10-Q,10-K and SOX.#working independently under pressure or as a cooperative team membe.Can refine the financial working procedure and internal control standard effectively. Target Job:Desired Job Category: Accounting Supervisor Ledger Reconciliation | Financial Director Controller | Financial Manager | Accounting Manager Desired Job Industry: Electronics-electronics | Telemunications(Equipment-Added Service) | Professional Service (Consultancy) | Pharmaceuticals | Machine Manufacturing Industry Desired Salary: Negotiable Desired City: # I can start from: within 1 month Work Experience :-#Science Inc.Corporate Finance ControllerResponsibilities and Achievements:Control the overall finance and fiscal management for eight affiliated panies, including the panies of medical vaccine R&D, blood serum manufacture, culture medium manufacture, medical instrument retail trade, and investment, located in different provinces or countries.Oversee and approve the processing of revenue, expenditure, data entry, ledger update, department budgets, account maintenance, cash flow forecast and etc. Develop and implement finance, accounting, cost, asset, cash and auditing procedures. Establish and maintain appropriate internal control safeguards.Prepare and ensure the financial statements, consolidated financial reports (include 10K & 10Q to SEC), and business analysis ply with local, government, SEC policy and the BOD oversea budgetary reporting requirements.Evaluate, coordinate, approve, implement and improve the financial programs and financial and management information systems (ERP) for the whole pany.municate with other managers and the BOD, to provide consultative support, through financial and management information analysis, government policy research, to corporate business planning and investing initiatives. Such as the acquisition performance or joint venture set up. Include investment project forecast, feasibility appraisal, return rate analysis, finance due diligence, project asset evaluation, and law issuestudy, equity structure design.Responsible for finance & operation integration of additional subsidiary pany, include former employee training, finance management upgrade, embedding corporate finance & internal control policy and etc.-某#Asia Pacific, ltdFinance ControllerResponsibilities and Achievements:As the project manager, newly set up QAD system(ERP). Use the QAD to plete and continuously improve the working process and procedures with Production, Logistic, Purchase and Sales department, make sure all the operations are under system control, reconcile with each other, ply with internal control policy, and make sure all of the QAD activities is in line with related laws and rules of the SAFE, Tax Bureau, Custom and Bank(Export VAT Refund); Responsible for all the accounting practice of pany, including financial planning, budgeting, creating month end financial reports, and preparing year-end reports for tax and business purposes and to oversea corporate, ensure timely reporting with high quality as well; Establish budgetary control systems and monitor pliance to budgets. Prepare analysis of data for management and executive board members. Lead and manage an efficient accounting and finance dept. Conduct standard cost set up and analysis, administer payroll affair, Maintain close working relationships with tax bureaus and all relevant governmental authorities as well as with independent auditors; Responsible for cash flow management, cash flow forecast, handling the financing in the authorized fields(Bank Loan, Foreign Loan and Capital Increase) to acplish new factory, and etc.-某#pany of#(China) Investment Co., LtdFinance SupervisorResponsibilities and Achievements:With Platinum, Crystal Report system, Hyperion and E-business system, handle two full sets of accounting books,including a investment co. and a trading pany Produce consolidation monthly financial and Managing reports of PRC GAAP & #GAAP to local and overseas management,Responsible for cash flow management, cash flow forecast,reconciliation AR with affiliate pany, Self assessment, Edit and improve internal control policy to ply with SOX,Liaise with inter-offices and external parties, including auditors, tax bureau, suppliers, clients,Conduct administration of payroll affair,Perform monthly variance and analytical review on financial reports between actual and forecast data, Refine finance and related business process, and etc. Education :- of#MasterMajor Category:International FinanceMajor Description and Courses:Having theories and experiences on Corporation Credit Rating and issued related thesis. 篇2:英文简历--财务总监PERSONALAddress: 602#, 5 Hong Run Apartment, 2179 Pu Dong (S.) Road, ShanghaiTel:#(8621) #Mob: (86) #E-mail:09-07#Bachelor of EconomicsShanghai University of Finance & Economy09-07#The High School Affiliated to Fu Dan UniversityWORKING EXPERIENCEOver the last ten years, have worked in various multinationalcorporate or investment house in the position of finance director or chief financial controller overcharging the financial operation of the pany starting from financial planning, budgeting, monitoring and risk control system etc.. Very familiar with relevant legislative and financial framework of either local Chinese panies or foreign panies operating in China. Strong relationship with local government entities and intermediary firms especially in the field of accounting, auditing, asset appraisal firms and mercial banks.04-Present NewMargin VenturesChief Financial ControllerNewMargin Ventures is one the leading venture capital firms in China with a range of domestic and international investors including such names as Motorola and was hired as one of the key members involved in the setting up of NewMargin Ventures especially in the area of financial and internal operation system detailed as follows:Res ponsible for leading the group’s finance function and establishing &improving the internal control system;Responsible for internal finance & accounting;Developed the staff performance evaluation system and incentive scheme;Monitored the fund’s fina ncials and prepared the shareholders reports;Coordinated with the fund / custodian bank to execute our investments effectively;Coordinated with the audit firm to implement the annual audit of the fund and financial due diligence on potential deals;Assisted the investment manager monitor the portfolio panies;Assisted in the merger negotiation and listing of portfolio panies;Assisted in the raising of an RMB fund, which was the first JV fund in China under the latest PRC laws.01-04#Toshiba (China) Co., Ltd. Shanghai BranchFinance DirectorLed a team in managing the group’s financial & accounting function;Developed strategic tax plans for the pany;Prepared the annual budget and reviewed / supervised its implementation;Performed financial an alysis of the group’s cost control function.05-01#Waigaoqiao Free Trade Zone Developing (Holding) Co., Ltd.Financial ManagerPrepared the budget and controlled the execution;Prepared strategic tax plan under laws;Organized the accounting work.05-05#Zhangjiang Hi-Tech Zone Developing .Assistant Financial ManagerResponsible for taxation claims;Conducted budget setting and monitoring.07-05#Shanghai Tea Import & Export .Chief Accountant / Internal AuditorResponsible for bookkeeping and maintenance of general ledger.PERSONALFluent written and spoken English and Mandarin.Actively participate in sports, reading and traveling.。
许昌学院城市与环境学院教案课程名称:地理专业英语课程类型:□理论课■理论、实践课□实践课学时:32 学分: 2授课教师:李中轩授课班级:08级地理科学授课学期:2010 至2011 学年第2学期教材名称:地理专业英语参考资料:1.地质学基础2.自然地理学3.地理学专业英语2011年 2 月 20 日《地理专业英语》教材分析本课程以培养学生地理科学专业英语文献阅读和翻译能力为主要目的,以岩石圈、大气圈、水圈、生物圈、土壤圈、人类社会圈系统和地理信息系统理论为主要内容,分为三大部共16个单元,其中技术地理部分涉及较多的3S技术方面内容,因而将其作为自学内容。
第一部分为自然地理学的基本原理,第二部分为人文地理学的基本理论,第三部分为地理信息系统的基础知识和应用。
每单元分为四个部分内容:基础知识文献、专业单词表、课后习题和补充阅读材料。
基础知识文献部分属于必学内容,涉及的地理学知识大多已经在专业课中学过,对于大三同学而言并不陌生。
关键是文献中使用大量专业词汇,这对学生而言需要花费更多的力气去过单词关,对于一个将来需要进一步深造的本科生来说是必须的和必要的知识储备。
文献部分需要认真阅读,并能复述出文献的主要观点,同时在课堂讨论中有自己的认识和独到观点,并且能够进行口语表达。
课后作业内容可以提前在预习时完成,将疑难问题放到课堂上经过讨论后解决。
每个课时都安排约30分钟作为学生的讨论和回答问题时间,也可以按照单元进度开展对应的口语交流,以提高对专业英语文献的理解和应用技能。
《专业英语》是地理科学专业的一门必修课。
本课程的目的是使学生在进行了两年的公共英语学习后,在巩固已有知识的基础上,掌握科技英语的特点,具备教好的英语资料查阅及专业英语交流的能力。
也就是说,开设本课程,主要是让学生具备“以英语为工具通过阅读获取专业所需信息的能力”。
通过本课程的学习,学生应在科技词汇、专业英语文献阅读速度、准确理解和翻译专业文献、摘要写作上有较大的提高。
2,术语区别由于BW也会支持行业内所同行的MDX标准查询语言,所以对于MS OLAP的概念,BW 里面都有相对应的概念,关系如下图所示:基于这个图表,也就可以看出两个不同版本的BPC产品在元数据上面的联系。
这种联系在原来ms版用户升级到nw版时尤为重要。
从BPC产品的功能角度出发,下面是另一张图表,说明两个应用平台的联系:在SQL Server 2005套件中,SQL Server Management Studio可以作为一个工作站组件,这是用来查看数据库,相应表、试图、存储过程的工具。
而从ABAP数据词典中,也可以相对应查看表、视图、结构(structure)。
此外,在SQL Server Management Studio中可以查看Analysis Service实例中的Cube、Dimension,而在BW的Data Warehouse Workbench(Tcode: RSA1)中也可以看到类似的结构。
在SQL Server2005中,SSIS被作为DTS的替代者引入,它允许用户自定义数据流,并且控制数据转换的规则。
SSIS从SQL Server数据类型中导入data objects、tables、cubes、master data;而在BW中,可以通过Tcode:RSPC来定义自己的数据流,通过process type 来组装流程和自己编写转换规则。
下面深入的看一下在Cube下面的一些概念对应:需要强调的是:在MS中的property相当于在BW中navigation attribute;而BPC中的Hierarchy并不是BI Hierarchy,BPC Hierarchy在技术上是Characteristic InfoObject的master data表的一个attribute;(要理解这句话,首先你得知道InfoObject有两种类型,然后InfoObject有三张对应表)在SAP BPC中,Time这个InfoObject作为Characteristic InfoObject。
海洋开发和海洋保护之间平衡的英语作文全文共6篇示例,供读者参考篇1The Oceans: Playgrounds for Fun or Fragile Homes?Hi friends! Today I want to talk to you about the oceans. The oceans cover most of our planet and they are super cool places full of amazing animals and plants. But the oceans are also very important for people too. We get a lot of our food and other resources from the oceans. Plus, they help control the weather and temperature. Pretty neat, right?Unfortunately, humans have not been very nice to the oceans lately. We've dumped a lot of trash and pollution into them. The oceans are getting warmer and more acidic because of human activities. This makes it hard for ocean animals to survive. Many fish populations are declining rapidly from overfishing as well.So what can we do about this? Well, we need to find a balance between using the oceans for our needs while also protecting them from too much harm and damage. On one side, we can't just stop using the oceans at all because they provide uswith so many important resources and jobs. But on the other side, if we completely overexploit the oceans, we'll ruin them and they won't be able to provide those resources anymore. Let me explain this dilemma a bit more:Ocean DevelopmentPeople rely on the oceans for lots of things that help support our lives and economies. First off, we get tons of our food from the ocean through fishing and aquaculture (fish farming). Seafood provides protein to feed billions of people. We also extract valuable materials like oil, gas, and minerals from beneath the ocean floor. These natural resources give us energy and raw materials for manufacturing.The oceans are also valuable for transportation and trade. Huge cargo ships can efficiently move goods across the oceans, connecting countries and markets worldwide. Many people work jobs relating to shipping, fishing, offshore oil rigs, and other ocean industries too. Without the oceans for these economic activities, our lives would be way more difficult!Ocean ConservationWhile the oceans provide lots of benefits, we can't just exploit them endlessly without any care for the environment. Theocean ecosystems are fragile and can easily be disrupted by human actions. When we overfish, pollute the waters, damage coastal habitats, and contribute to climate change, it really harms ocean life.Fish populations crash when we take too many before they can reproduce. Plastic waste and chemical runoff poisons and entangles marine animals. Warming ocean temperatures and acidification makes it hard for creatures like coral reefs to survive. We're seeing many ocean species go extinct because of these human-caused problems.If we ruin the health of the ocean environments, it's not just the marine animals that suffer - we suffer too! Unhealthy, polluted oceans are unable to sustain robust fish populations that we depend on for food and jobs. Damaged coastal regions can't support other economic activities like tourism, recreation, and development. We need to protect and conserve the oceans to preserve all the resources and benefits we get from them.Finding the BalanceSo as you can see, there are two competing sides to consider when it comes to the oceans: development and conservation. We can't just choose one side and ignore the other, because we relyon the oceans for important resources but also need to protect them from being ruined.In my opinion, we need to find a smart balance by practicing sustainable ocean management. This means allowing reasonable levels of fishing, resource extraction, shipping, and other activities to support our needs and economies. But at the same time, we have to properly regulate those activities with limits, laws, and protections to ensure they don't deplete and destroy marine environments.For example, we could set science-based catch limits for fishing to keep fish populations at sustainable levels. We could restrict offshore drilling and mining in environmentally sensitive areas. We could crack down harder on illegal pollution dumping from ships. And we could set aside more areas of the ocean as protected marine reserves where little to no human activity is allowed, so those ecosystems can recover and thrive.Doing these types of balanced, sustainable management actions won't be easy - it will take cooperation between many nations, industries, and groups. But finding this middle ground is crucial, because if we go too far in exploiting the oceans without any limits, we'll end up losing the very resources we depend on when those environments completely collapse. And if wecompletely prohibit any use or development of the oceans at all, we'll miss out on all the benefits, resources, and economic opportunities that responsible ocean activities can provide.We have to learn to share and care for the oceans, using them wisely while also nurturing and protecting them. The oceans give us so much, so we owe it to them and to future generations to be good ocean stewards. With smart, sustainable ocean policies, we can have our seafood, coastal jobs, and natural resources while still keeping our oceans healthy and amazing places full of incredible life.What do you think? I'd love to hear your ideas on this too! How else can we better balance using the oceans while also protecting them? It will take all of us making good choices to preserve these incredible ocean playgrounds and homes. Let's work together to keep our beautiful blue planet happy and healthy!篇2The Ocean: Our Big Blue FriendThe ocean is so big and amazing! It covers most of our planet with its bright blue waters. I love learning about all the cool creatures that live in the ocean, like whales, sharks,octopuses, and really tiny things like plankton. The ocean is full of mysteries and treasures waiting to be discovered!But the ocean is also very important for people too. We get lots of our food from the ocean by catching fish and other seafood. Many people make their living by fishing or working on boats and ships. Boats and ships also use the ocean to transport goods and materials all around the world. Without the ocean, global trade would be much harder.The ocean is also being used more and more to get energy from things like wind turbines, waves, and tides. Some countries are looking at getting fresh water from the ocean by desalinating the salty seawater. There are probably other ways we could use the ocean that we haven't even thought of yet!With all of these uses, it's no wonder lots of people and companies want to develop and build things in the ocean. They see it as a big resource we can take from. But this makes me a little worried.You see, the ocean is the home for so many amazing animals and plants. If we overuse the ocean or put too much stuff in it, we could really mess up their habitat. Pollution from ships, runoff from the land, and garbage could make the water dirty and unsafe. Overfishing could mean species go extinct because wetake too many. Building structures like oil rigs and wind turbines could disturb the ocean floor where lots of sea life makes its home.It makes me sad to think of the ocean becoming a dirty, dead place with no fish, whales, or coral reefs left. That's why we need to make sure we protect the ocean while still using it. We have to find the right balance between development and conservation.What does that mean exactly? Well, conservation means keeping the ocean and its habitats healthy by not taking too much or putting in too much harmful stuff. It means having rules about how many fish can be caught, where building can happen, and how much pollution is allowed. It also means cleaning up existing messes we篇3The Incredible Oceans and How to Keep Them AmazingDid you know that the oceans cover about 71% of the Earth's surface? That's a huge area! The oceans are incredible places, full of mysterious creatures and amazing environments. From the deepest trenches to the sunny shallows, there's so much to explore and discover in the oceans.I love learning about all the different animals that live in the ocean, like whales, sharks, dolphins, octopuses, and millions of species of fish in every colorful shade you can imagine. The diversity of life in the ocean is mind-boggling. Coral reefs are like brilliant underwater cities teeming with residents. And the ocean isn't just about animals - it's got inredible landscapes too, with hydrothermal vents, seamounts, and giant underwater canyons and mountain ranges.The oceans are also really important for human life. They generate most of the oxygen we breathe and absorb lot of carbon dioxide, which helps regulate the climate. Many communities depend on fishing and aquaculture for food and jobs. Ships transport goods across the oceans, connecting countries through global trade networks. Medicines and other important products come from marine plants and animals. People even get energy from wind, wave, and tidal power generated by the oceans.With all the benefits that oceans provide, it's obvious we need to take good care of them. But sadly, humans have not been very good ocean stewards. We've polluted the waters with trash, chemicals, and oil spills. Overfishing has decimated many fish populations. Climate change is causing ocean temperaturesand chemistry to shift, damaging coral reefs and other ecosystems.So how can we develop and use the oceans in a sustainable way that protects marine environments for the future? I think we need to strike a careful balance.On one side, we can't just completely stop using the ocean and exploiting its resources. Too many people and economies depend on the oceans for food, jobs, transportation, trade, and other benefits. And we need to harness safe ocean energy sources like offshore wind to transition away from fossil fuels. Cutting off all ocean development would harm many communities and make it harder to address climate change.But on the other hand, we absolutely must take much better care of the oceans than we currently do. Pollution and overfishing have already caused a lot of damage. Climate change from burning fossil fuels is a huge threat to ocean health. If we don't protect the oceans from these dangers, marine ecosystems could collapse, which would be terrible for the planet and all of humanity.The key is finding a middle way - developing the oceans in a smarter, more sustainable, eco-friendly way while greatly increasing conservation efforts. We need to use ocean resourcescarefully and responsibly without depleting them or ruining marine habitats.What could this balanced approach look like? Fisheries could be better regulated and managed to avoid overfishing. Sustainable aquaculture farms could take some pressure off wild fish populations. More marine protected areas should be created to preserve biodiversity hotspots and sensitive ecosystems. Stricter regulations could prevent ocean pollution from runoff, plastics, and oil spills. Governments could invest more in ocean science and monitoring to track issues like climate impacts, dead zones, and threatened species. Coastal infrastructure and development would need to be carefully planned to avoid damaging environments like mangroves, estuaries, and wetlands.The transition to renewable ocean energy like offshore wind, wave, and tidal power should be accelerated to replace dirty fossil fuels that drive climate change and ocean acidification. New technologies could allow more efficient, lower-impact resource extraction and shipping.At the same time, creating jobs and economic opportunities through sustainable ocean industries like fishing, aquaculture, marine biotechnology, ocean tourism, renewable energy, andmarine research and conservation would be important. This could provide livelihoods to coastal communities while aligning economic incentives with environmental protection.Getting this balance right won't be easy. It will require cooperation between nations, communities, companies, and organizations. New policies, agreements, technologies, and mindsets will be needed. But I believe it's possible with commitment and creativity.The oceans are an awe-inspiring wonder of nature that we're lucky to have on our planet. They provide invaluable resources and services that we can't live without. But we must be good stewards and stop degrading them through pollution, overfishing, and carbon emissions. With smart, sustainable development coupled with strong conservation, we can keep enjoying the oceans' benefits for generations to come while preserving their mesmerizing beauty and incredible biodiversity.The oceans are simply too vital and too amazing to ruin. As a kid who loves learning about marine life, I don't want to imagine a future without healthy, vibrant oceans full of fascinating creatures and habitats. It's up to our generation to get smarter about how we use this precious resource so the oceans can keepastounding us forever. Let's find that balance and be good ocean protectors!篇4The Oceans Are ImportantThe oceans are really big and really important. They cover most of the Earth and have all sorts of cool animals like whales, sharks, dolphins, and fish. The oceans also give us food to eat, help make the air we breathe, and even help control the weather.Without the oceans, life on Earth would not be possible. But the oceans are in trouble because of things people do. We need to take better care of the oceans while still being able to use them.Using the OceansPeople use the oceans in lots of ways. Many people make their living by fishing in the oceans. Fishermen catch fish, shrimp, crabs, and other seafood to sell at markets and restaurants so we can eat it.Big ships also use the oceans to transport goods and materials all over the world. Ships carry things like cars, clothes,toys, electronics, and fuel across the oceans from one country to another.The oceans are also used for fun activities like swimming, surfing, boating, snorkeling, and scuba diving. Many people go on cruises in the ocean for vacations too.Under the oceans, there are natural resources like oil, gas, and minerals that people take out to use for energy and making things. There are entire oil rigs and platforms built in the ocean just for getting these resources out.Helping the OceansWhile using the oceans is important for jobs, food, transportation, and energy, it can also really hurt the oceans and ocean life when we overdo it or are not careful. Pollution from oil spills, garbage dumping, and runoff from land all dirty up the oceans and make it hard for sea creatures to survive.Overfishing is another big problem where too many fish are taken from the ocean before they can restock their populations. This can drive whole species towards extinction if we're not careful.So we have to find ways to keep using the oceans for our needs while also protecting them. Countries have to make lawslimiting how much fishing is allowed and setting rules for ships dumping trash or leaking oil. Coastal cities need good sewage systems and rules about runoff to stop polluting the ocean nearby.Protected Ocean AreasOne of the best ways to help the oceans is by setting up marine protected areas. These are parts of the ocean that are off-limits to fishing, drilling, dumping, or development of any kind. Animals and habitats in these safe areas can thrive undisturbed.Marine protected areas act like oceans reserves or parks. They allow sea life to rebound in numbers, which can then spread to repopulate surrounding areas too. It's like giving parts of the ocean a break so they can recover.There are marine protected areas all over the world, but we probably need more of them to really help the oceans recover. Countries have to work together to decide where to put them and how big to make them.Using Ocean Resources WiselyOf course, we can't just completely stop using the oceans because too many jobs and lives depend on it. But we have to besmarter and more responsible about how we use ocean resources.For fishing, this means only taking what can be naturally replaced through breeding. It also means stopping fishing during breeding seasons and throwing small fish back instead of keeping them. Better fishing rules help prevent overfishing.For shipping, it means stricter laws about dumping trash or leaking oil into the ocean. Ships need to properly contain their waste and dispose of it responsibly on land. There should be heavy fines for ships that pollute the oceans.For offshore drilling and mining, very strict safety rules have to be followed to prevent spills, leaks or other accidents that could destroy ocean habitats. And some areas should just be banned from drilling if they are too environmentally sensitive.New Technology Can HelpScience and new technology can also help us better balance using and preserving the oceans. For example, better nets and fishing gear can help fishermen catch just the types and amounts they want while letting everything else go free.Marine biologists are studying ways to rebuild and restore damaged parts of the ocean like reefs and oyster beds too. Newfarming methods for shellfish and seaweed could provide more food from the oceans without overfishing.And engineers are working on ships, rigs and equipment that produce less pollution, waste and greenhouse gases that are warming up and damaging the oceans.Every Little Bit HelpsWhile big steps like laws, protected areas, and new technology are important, every single person can do small things to help take care of our oceans too. We can reduce trash and plastic waste, conserve water at home, and avoid purchasing products that exploit the oceans in bad ways.On beach trips, we should never leave any litter behind and try to clean up any discarded items we do find. We can volunteer for beach and coast cleanups to help remove tons of trash that would otherwise end up polluting the ocean.At home, we can cut back on single-use plastics that may eventually make it to the ocean and harm marine life. We can also learn about and try to buy seafood from sustainable fisheries instead of overfished species.Every positive action, no matter how small, can ripple out and help preserve the beautiful, important oceans that make our planet so special.The Bottom LineThe oceans are one of the most precious resources we have. We all depend on them for so many things. But if we're not careful, we could ruin and destroy them forever with pollution, overfishing, and overdevelopment.The right balance has to be struck between using the oceans for our needs while still protecting their health for the future. With better laws, protected areas, wise management, and new technologies - plus everyone doing their small part - we can enjoy the bounty of the oceans for generations to come.篇5The Wonders of the Ocean and How to Protect ThemDo you like going to the beach? I sure do! Playing in the waves, looking for seashells, and feeling the warm sand between my toes is so much fun. The ocean is amazing and full of incredible creatures and wonderful mysteries.But did you know the ocean is also very important for our planet and all the people who live on it? It provides food, energy, helps control the weather, and so much more. We need to take good care of the ocean so it can keep providing all these important things.However, there are some big challenges we are facing when it comes to the ocean. On one hand, we want to use the ocean's resources and do things like fishing, shipping goods across the sea, drilling for oil and gas, and generating electricity from waves and tides. These ocean activities help drive economies and provide jobs.On the other hand, we have to be very careful that our use and development of the ocean doesn't damage or destroy the fragile marine environments. Overfishing, pollution, drilling accidents, and other human activities have already caused a lot of harm to ocean life and coastal areas.So how can we balance using the ocean's resources while still protecting it? It's not an easy problem to solve, but I think with some smart planning and by working together, we can find a way. Here are some of the key things we need to do:Fishing ResponsiblyFishing is one of the oldest ways humans have used the ocean's resources. But we have to be very careful not to overfish and deplete fish populations. Strict limits should be placed on how many fish can be caught, especially for species that are endangered or struggling. Certain areas of the ocean should be set aside as total "no-fishing zones" to allow fish stocks to replenish.We also need better fishing practices that avoid accidentally catching other marine life like dolphins, turtles, and sharks in the nets and lines. More sustainable aquaculture (fish farming) can help meet demand without further depleting wild populations.Stop Ocean PollutionTrash, chemicals, oil spills, and other pollutants are really hurting ocean life and coastal communities. We must get very serious about stopping pollution from entering the seas. Stronger regulations, recycling programs, cleaner industries, greener shipping practices, and major cleanups of existing pollution are urgently needed.Marine life is literally choking on plastics and toxic pollutants.I don't want fish and dolphins and whales and birds to die from our tras篇6The Wonders of the Ocean and How to Protect ThemThe ocean is amazing! It covers most of our planet with its salty water that goes on forever and ever. The ocean has lots of cool animals like whales, sharks, dolphins, and octopuses. It also has pretty coral reefs with colorful fish swimming all around. Just imagining the ocean makes me feel calm and peaceful.But did you know the ocean is also really important for people's lives? Many people work as fishermen and catch fish, crabs, shrimp and other tasty seafood from the ocean to sell at the market. Big cargo ships sail across the ocean carrying products and goods from one country to another. Oil and gas companies also get energy resources from deep under the ocean floor.People have also built things in and near the ocean, like harbors for ships, beachfront hotels and restaurants, and offshore wind turbines that generate electricity from the wind over the water. Some countries even get most of their land territory by forming new artificial islands in the ocean!With all these human activities, it's important that we take good care of the ocean's health. Otherwise, the ocean could gettoo polluted or damaged, and we wouldn't be able to enjoy its benefits or the amazing marine life anymore.One big threat to the ocean is plastic pollution. Plastic bottles, bags, and packaging that gets thrown away often ends up in the ocean, harming the animals that accidentally eat it or get tangled up in it. There are actually huge "garbage patches" of floating plastic trash in parts of the ocean!Another problem is overfishing, where too many fish get caught before they can breed more babies. This could make some types of fish disappear completely, which is scary since seafood is an important food source for millions of people.Oil spills from ships and offshore drilling are bad too. The oil sticks to creatures' feathers and fur, making it hard for them to swim, fly or stay warm. It can also poison the ocean water and beaches.Ultimately, if the ocean gets too dirty or too many marine animals go extinct, it would be a terrible loss for our whole planet. But don't worry, there are lots of ways we can help protect the ocean。
OLAP(在线分析处理)技术一、发展背景60年代,关系数据库之父E.F.Cdd提出了关系模型,促进了联机事务处理(OLTP)的发展(数据以表格的形式而非文件方式存储)。
1993年,E.F.Cdd提出了OLAP(联机分析处理)概念,认为OLTP已不能满足终端用户对数据库查询分析的需要,SQL对大型数据库进行的简单查询也不能满足终端用户分析的要求。
用户的决策分析需要对关系数据库进行大量计算才能得到结果,而查询的结果并不能满足决策者提出的需求。
因此,E.F.Cdd提出了多维数据库和多维分析的概念,即OLAP技术概念。
OLTP与OLAP的不同点:二、关于OLAP◆定义OLAP(联机分析处理) :是使分析人员、管理人员或执行人员能够从多种角度对从原始数据中转化出来的、能够真正为用户所理解的、并真实反映企业维特性的信息进行快速、一致、交互地存取,从而获得对数据的更深入了解的一类软件技术——OLAP委员会的定义(请特别注意,这是一类技术,而非特指某软件、或管理方法)。
OLAP的目标:是满足决策支持或多维环境特定的查询和报表需求,它的技术核心是“维”这个概念,因此OLAP也可以说是多维数据分析工具的集合。
◆OLAP相关基本概念:1、维:是人们观察数据的特定角度,是考虑问题时的一类属性,属性集合构成一个维(时间维、地理维等)。
2、维的层次:人们观察数据的某个特定角度(即某个维)还可以存在细节程度不同的各个描述方面(时间维:日期、月份、季度、年)。
3、维的成员:维的一个取值。
是数据项在某维中位置的描述。
(“某年某月某日”是在时间维上位置的描述)4、多维数组:维和变量的组合表示。
一个多维数组可以表示为:(维1,维2,…,维n,变量)。
(时间,地区,产品,销售额)5、数据单元(单元格):多维数组的取值。
(2000年1月,上海,笔记本电脑,$100000)◆OLAP的特性1、快速性:用户对OLAP的快速反应能力有很高的要求,主要是指计算机的计算的反应速度,系统应能在5秒内对用户的大部分分析要求做出反应,但对业务数据的实时信息却很难反应。
ACCA考试科目F2重要知识:Planning and Control 2019年01月07日ACCA考试科目F2把管理活动总结为三个词:planning, control and decision-making. 这里通过举例讲解一下Planningand control.小编再送一个考试资料包,可以分享给小伙伴,自提,戳:ACCA资料【新手指南】+内部讲义+解析音频1.Planning(关键词是objective/goal andstrategy)(i) Establish the company’sgoal: increase profit by 20% in five years.(ii) Identify alternativestrategies to achieve the goal:Increase market sharethrough price promotionDevelop new products withhigher customer value (i.e. better price/quality mix)Cost reductionAcquisition ofcompetitors(iii) Analyze the alternativesand make a choice, e.g. develop new products(iv) State the expectedoutcomes towards the goal in the form of annual budget把总目标分解成五个年度目标,并用预算的形式表达出来(如:每年的销售额是多少,其中新产品带来多少销售,新产品开发费用是多少,利润是多少)注:F2不要求考生设定目标或选择策略,只要求判断哪些活动属于Planning。
2. Control (关键词是Compare) (i) Obtain data about actualresults(ii) Compare the actual withthe plan (e.g. with the profit stated in annual budget)(iii) Take improvement actionsand/or revise the original plan 如果实际和计划有差异,可能是实际执行的问题,也可能是计划本身不合理。