以MEMS技术为基础的组合导航系统
- 格式:ppt
- 大小:10.15 MB
- 文档页数:77
基于MEMS的火箭制导平台INS与GPS组合导航算法袁鸣;鲍泳林;武雨霞
【期刊名称】《太赫兹科学与电子信息学报》
【年(卷),期】2018(016)005
【摘要】提高火箭制导平台的导航定位精确度,是火箭试验技术的重要研究内容.针对某火箭制导平台,设计了一种基于微机电惯性导航(INS)与全球定位系统(GPS)多传感器相组合的,采用间接输出校正的导航解算算法.算法利用卡尔曼滤波器对系统误差进行最优估计,估计结果修正惯导解算输出和敏感元件输出.仿真结果表明,在GPS收星有效以及火箭动态过程平稳情况下,该组合导航算法对INS误差随时间积累有明显抑制作用.
【总页数】6页(P807-812)
【作者】袁鸣;鲍泳林;武雨霞
【作者单位】中国工程物理研究院总体工程研究所,四川绵阳 621999;中国工程物理研究院总体工程研究所,四川绵阳 621999;北京航空航天大学宇航学院,北京100191
【正文语种】中文
【中图分类】TN967.2;V19
【相关文献】
1.应用于MEMS_SINS/GPS组合导航系统的H∞容错滤波算法 [J], 石静;杨建华;刘慧英
2.GPS/INS组合导航在制导火箭弹中的应用 [J], 丁传炳;王良明;常思江
3.神经网络辅助的GP S/MEMS-INS组合导航算法 [J], 刘庆元;郝立良;黄书捷;朱山昱
4.基于MEMS的火箭制导平台INS与GPS组合导航算法 [J], 袁鸣; 鲍泳林; 武雨霞
5.制导火箭弹GPS/INS全组合导航系统仿真研究 [J], 丁传炳;王良明;常思江
因版权原因,仅展示原文概要,查看原文内容请购买。
MEMS_IMU_GPS组合导航系统的实现MEMS_IMU_GPS组合导航系统是一种基于微电子机械系统惯性测量单元(IMU)和全球定位系统(GPS)的导航系统。
它通过将IMU和GPS的测量数据进行集成和融合,提供更准确和可靠的位置、速度和姿态信息。
在本文中,将详细介绍MEMS_IMU_GPS组合导航系统的实现原理和关键技术。
首先,需要了解IMU和GPS的基本原理。
IMU主要由三个加速度计和三个陀螺仪组成,用于测量物体的加速度和角速度。
GPS则通过接收卫星发射的信号来测量接收器与卫星之间的距离,从而确定接收器的位置。
IMU和GPS各自都有一定的测量误差,但是通过集成和融合它们的测量数据,可以大幅度提高导航系统的性能。
在实现MEMS_IMU_GPS组合导航系统时,首先需要对IMU和GPS的数据进行预处理。
对于IMU数据,需要进行误差补偿和积分处理。
误差补偿包括陀螺仪的零偏校准和加速度计的尺度因素校准等,以减小测量误差。
积分处理则可以将加速度计的测量值积分得到速度和位置信息,将陀螺仪的测量值积分得到姿态信息。
对于GPS数据,则需要通过解算接收机与卫星之间的距离,从而确定接收机的位置。
接下来,需要进行导航滤波的处理。
导航滤波是将IMU和GPS的数据进行集成和融合的关键步骤,常用的滤波算法包括卡尔曼滤波和粒子滤波等。
卡尔曼滤波是一种利用概率统计的方法对系统状态进行估计和预测的算法,可以融合IMU和GPS的数据,提供更准确和可靠的导航结果。
粒子滤波则是一种基于蒙特卡洛方法的滤波算法,通过对系统状态进行随机取样,逐步逼近真实状态。
此外,还需要考虑导航系统的误差补偿和校准。
导航系统在使用过程中,由于环境变化和传感器老化等因素,可能会产生误差和漂移。
为了提高系统的精度和可靠性,需要进行误差补偿和校准。
误差补偿包括对IMU 和GPS数据的实时校准和修正,以减小测量误差。
校准则包括对传感器的定标和校准,以保证传感器的准确性和一致性。
MEMSIMU-GNSS超紧组合导航技术研究MEMSIMU/GNSS超紧组合导航技术研究导航技术一直以来都是人们在探索和发展的领域之一。
在航空航天、海洋探测、无人驾驶、导弹制导等领域,高精度和高可靠性的导航系统是至关重要的。
然而,在现实环境中,GNSS(全球卫星导航系统)存在着信号遮挡、多径效应、环境干扰等问题,从而导致导航精度下降和可用性降低。
为了解决这些问题,MEMSIMU/GNSS超紧组合导航技术被提出并广泛研究。
MEMSIMU(微电子机械系统惯导)是一种利用微机电系统技术实现的惯性导航系统。
与传统的惯性导航系统相比,MEMSIMU具有体积小、重量轻、功耗低等特点,并且能够提供高精度的加速度和角速度信息。
MEMSIMU的惯性传感器可以通过应变、电容、电压差、电流和磁力等信号转换原理来实现。
GNSS是一种基于卫星导航原理的全球定位系统,包括了美国的GPS、俄罗斯的GLONASS、中国的北斗导航系统等。
GNSS通过接收卫星发射的信号,并通过解算信号的传播时间和卫星的位置来计算接收器的位置。
然而,在城市峡谷、建筑物密集区域和山区等环境中,由于信号遮挡和多径效应的存在,GNSS导航系统的可用性和精度大大降低。
因此,将MEMSIMU和GNSS组合在一起,能够充分利用两者的优势,实现超紧组合导航,提高导航的精度和可用性。
MEMSIMU/GNSS超紧组合导航技术的核心思想是通过融合MEMSIMU的惯性导航信息和GNSS的位置信息,来实现对导航系统更精确的定位和导航。
具体来说,首先利用MEMSIMU中的加速度计和陀螺仪来测量加速度和角速度,并通过积分得到位置和姿态信息。
然后,通过接收GNSS卫星发射的信号,根据信号传播时间和卫星位置来计算GNSS接收器的位置。
接下来,通过数据融合算法将MEMSIMU的位置信息与GNSS的位置信息进行融合,不断校正和更新导航系统的位置和姿态信息。
最终,得到更准确的导航结果。
基于MEMS技术的微型惯性导航系统的发展现状一、本文概述随着微纳技术的快速发展,微型惯性导航系统(Micro-Inertial Navigation System, MINS)以其体积小、重量轻、功耗低等优点,在航空航天、无人驾驶、机器人导航、个人定位等众多领域展现出广阔的应用前景。
其中,基于微机电系统(Micro-Electro-Mechanical Systems, MEMS)技术的微型惯性导航系统因其实用性和成本效益,成为了当前研究的热点。
本文旨在全面概述基于MEMS技术的微型惯性导航系统的发展现状,包括其基本原理、关键技术、应用领域以及面临的挑战。
我们将简要介绍惯性导航系统的基本原理和MEMS技术的基本概念。
然后,重点分析当前MEMS微型惯性导航系统的关键技术,如微型化设计、误差补偿与校准、数据处理算法等。
接着,探讨该技术在航空航天、无人驾驶、个人定位等领域的应用现状。
我们将讨论当前微型惯性导航系统面临的挑战,如误差累积、环境适应性等问题,并展望未来的发展趋势。
通过本文的阐述,希望能够为相关领域的研究人员和技术人员提供有价值的参考,推动基于MEMS技术的微型惯性导航系统的发展和应用。
二、MEMS技术在微型惯性导航系统中的应用微型惯性导航系统(Micro-Inertial Navigation System, MINS)结合了微型机电系统(Micro-Electro-Mechanical Systems, MEMS)技术与惯性导航原理,实现了导航系统的微型化、低功耗和高度集成化。
随着MEMS技术的快速发展,MINS在军事、航空、航天、无人驾驶以及消费电子等领域的应用越来越广泛。
MEMS加速度计和陀螺仪是MINS的核心部件,用于测量载体在三维空间中的加速度和角速度。
通过精确的测量和数据处理,它们为导航系统提供必要的导航参数。
与传统的惯性器件相比,MEMS加速度计和陀螺仪具有体积小、重量轻、功耗低和成本低的优点,非常适合用于构建微型化的惯性导航系统。
足部安装MEMS-IMU个人导航系统王立兵;杨松普;罗巍;皮燕燕【摘要】为了实现室内外环境下个人自主导航,研究了足部安装的MEMS-IMU个人导航系统.根据人行走时足部具有周期性零速的特征,以加速度计输出矢量和、滑动方差和陀螺仪输出的角速度矢量和为检测量,设计了一种多条件零速检测算法,有效地提高了零速检测的准确性.针对MEMS惯性传感器零漂大、精度低的问题,导航定位算法以传统的捷联解算算法为基础,进行了适应性改进.引入零速修正(ZUPT)技术,设计了以速度信息作为伪量测的Kalman滤波器.在零速阶段对系统速度,姿态,位置误差进行估计,将估计结果反馈以修正导航解算的累积误差.实验结果表明,基于上述导航修正算法可以有效地消除MEMS惯性传感器零漂引起的累积误差,使得多组多种行走路径下系统的定位误差均小于行程的2%.【期刊名称】《中国惯性技术学报》【年(卷),期】2016(024)004【总页数】4页(P460-463)【关键词】个人导航系统;MEMS;零速修正;零速检测【作者】王立兵;杨松普;罗巍;皮燕燕【作者单位】中国人民解放军63961部队,北京100012;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131【正文语种】中文【中图分类】U666.1个人导航系统(Pedestrian Navigation System,PNS)是指实时确定行人行进方向、速度、位置等信息的系统[1]。
一般采用各种传感器模块测量行人运动参数,经过导航解算实时提供可视的导航信息。
在消防救援,矿井勘探,单兵作战等领域,能够已知人员的位置信息,对于保证人员安全,提高救援速度,增强作战能力等具有重要意义。
传统的卫星导航具有全方位实时定位功能,但在卫星信号不可用时,无法定位,因此只适用于室外无遮挡的环境。
MEMS惯性器件的快速发展及其成本低,体积小,重量轻,功耗低的特点,使得基于MEMS-IMU的个人导航系统成为研究热点。
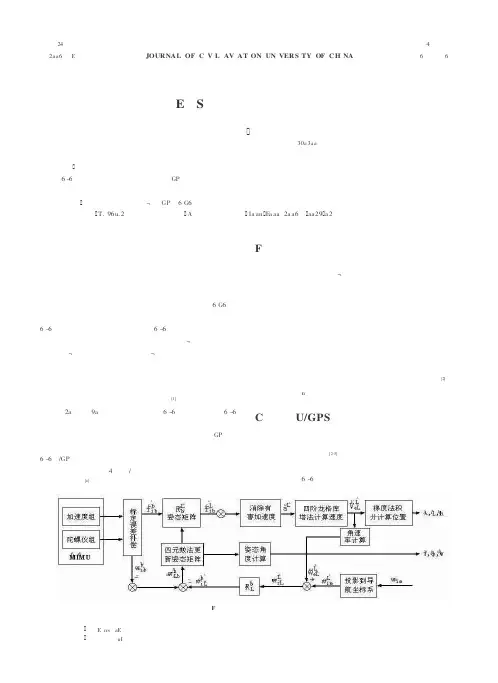
基于MEMS惯性器件的微小卫星导航系统的硬件加速设计黄坤;方锦明【摘要】微小卫星的导航控制系统对体积、质量、功耗和成本都有着较高的要求;设计了一个基于微机电系统的惯性测量单元的组合导航控制系统;描述了该导航控制系统的详细片上系统(SOC)设计,提出了利用组件编辑器把系统中微处理器的部分软件任务通过硬件并行处理的方式来加速系统的运算速度;实验表明,导航控制系统的响应频率从24Hz提高到了35Hz,显著提升了系统的实时性能.%Micro-satellite' s navigation and control system has very strict requirement in volume, mass, cost and power consumption.Micro-Electro-Mechanical Systems (MEMS) based Inertial Measurement Units are integrated into the proposed combinatorial navigation and control system. Details of the System-on-Chip (SOC) design are presented in the navigation system. A novel method is exploited to accelerate system' s digital signal process. Some of the traditional micro processor' s tasks are implemented as hardware components, which are integrated into the SOC with on-chip-bus. As experiment demonstrating, response frequency oi the navigation and control system is accelerated from 24Hz to 35Hz. Real time performance of the system has significantly improved.【期刊名称】《计算机测量与控制》【年(卷),期】2011(019)001【总页数】3页(P161-163)【关键词】硬件加速;片上系统;微小卫星导航【作者】黄坤;方锦明【作者单位】浙江义乌工商职业技术学院,计算机工程系,浙江,义乌,322000;浙江义乌工商职业技术学院,计算机工程系,浙江,义乌,322000【正文语种】中文【中图分类】U666.10 引言由于微小卫星在空间科学试验、环境检测和通信等空间应用中有着广泛的价值, 而且有着研制风险小、体积小、质量轻及发射方式灵活的优点, 近年来受到研究者的高度关注。
一种mems-imu模块组合里程计的数据处理方法及系统【实用版4篇】目录(篇1)一、引言二、MEMS-IMU 模块与里程计的组合导航系统1.MEMS-IMU 模块的特点2.里程计的工作原理三、数据处理方法1.数据融合策略2.滤波算法四、实验结果与分析1.实验环境与参数设置2.实验结果验证五、结论正文(篇1)一、引言随着科技的发展,人们对于导航系统的需求越来越高。
惯性导航具有完全自主、独立的特点,短时精度高,使其在许多领域受到广泛关注。
其中,MEMS-IMU 模块具有低成本、重量轻、抗强冲击等优势,被广泛应用于惯性导航系统中。
里程计是一种测量物体运动距离的装置,与 MEMS-IMU 模块结合可以提高导航系统的精度和鲁棒性。
本文将探讨一种 MEMS-IMU 模块与里程计组合导航系统的数据处理方法及其应用。
二、MEMS-IMU 模块与里程计的组合导航系统1.MEMS-IMU 模块的特点MEMS-IMU(Micro Electro Mechanical System - Inertial Measurement Unit)模块是一种基于微电子机械系统的惯性测量单元,可以实时测量物体的加速度和角速度。
MEMS-IMU 模块具有低成本、重量轻、抗强冲击等优势,使其成为惯性导航系统的理想选择。
2.里程计的工作原理里程计是一种测量物体运动距离的装置。
常见的里程计有光电里程计、霍尔效应里程计等。
里程计通过测量物体运动过程中的某个物理量,从而间接测量物体的位移。
三、数据处理方法1.数据融合策略在 MEMS-IMU 模块与里程计组合导航系统中,数据融合策略是提高导航精度的关键。
常见的数据融合策略有卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波等。
这些策略可以将 MEMS-IMU 模块和里程计的数据进行有效融合,从而提高导航系统的精度和鲁棒性。
2.滤波算法滤波算法是在数据处理过程中对测量数据进行去噪和优化的方法。
在MEMS-IMU 模块与里程计组合导航系统中,常见的滤波算法有低通滤波、高通滤波、带通滤波等。
第44卷 第6期系统工程与电子技术Vol.44 No.62022年6月SystemsEngineering andElectronicsJune2022文章编号:1001 506X(2022)06 1994 07 网址:www.sys ele.com收稿日期:20210521;修回日期:20210922;网络优先出版日期:20220117。
网络优先出版地址:https:∥kns.cnki.net/kcms/detail/11.2422.TN.20220117.1821.004.html基金项目:陕西省自然科学基础研究计划(2020JQ 491,2019JM 434)资助课题 通讯作者.引用格式:李文华,汪立新,沈强,等.基于鲁棒EKF的MEMS INS/GNSS/VO组合导航方法[J].系统工程与电子技术,2022,44(6):1994 2000.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:LIWH,WANGLX,SHENQ,etal.MEMS INS/GNSS/VOintegratednavigationmethodbasedonrobustEKF[J].SystemsEngineeringandElectronics,2022,44(6):1994 2000.基于鲁棒犈犓犉的犕犈犕犛 犐犖犛/犌犖犛犛/犞犗组合导航方法李文华,汪立新 ,沈 强,李 灿,吴宗收(火箭军工程大学导弹工程学院,陕西西安710025) 摘 要:针对传统惯导/卫导组合导航在复杂环境下易受干扰,观测量异常从而影响导航性能的问题,提出了基于鲁棒扩展卡尔曼滤波(extendedKalmanfilter,EKF)的组合导航方法。
设计了基于微惯性导航系统(microelectro mechanicalsystem inertialnavigationsystem,MEMS INS)、全球导航卫星系统(globalnavigationsatellitesystem,GNSS)及视觉里程计(visualodometry,VO)的融合框架,给出了在GNSS信号失效情形下的导航滤波模型,并将EKF与Huber方法结合,克服观测量受噪声干扰时对导航性能的影响,以提升系统鲁棒性。
mems微惯导GPS组合惯导系统mems微惯导GPS组合惯导系统全球卫星定位系统(GPS)导航可以全天候作业,且具有较⾼的导航精度,本钱低廉,是当今运⽤最多的⼀种导航系统。
通过差分运⽤的双天线GPS接纳机不只可以完成定位,⽽且可以动态获得准确的北向,长时刻运⽤也不会发作潇洒。
但在运⽤于运动载体时,因为运动载体的机动改变,常使接纳天线遭到断续的遮挡,乃⾄对已盯梢的卫星信号会发作失锁现象,需求⼀定时刻才⼲再次捕获和盯梢上卫星信号,使导航数据呈现断续,影响导航的可靠性。
惯性(INS)导航可以供给多种导航参数,具有不依赖外界信息、隐蔽性好、抗⼲扰性强、全天候作业、数据输出率⾼级长处,是彻底⾃主的导航系统。
但它的精度随时刻⽽改变,长时刻作业会累积较⼤误差,不宜作长时刻导航。
卫星导航系统(GPS)、惯性导航系统(INS)独⾃运⽤都有难以克服的限制,XW-ADU5650将卫星导航系统(GPS)与惯性导航系统(INS)联合运⽤,运⽤计算机数据处理、卡尔曼滤波等技能完成两种导航技能的有机组合,发挥各⾃特⾊,交融优势,取长补短,弥补了单⼀导航技能的缺点,具有在精度、可靠性、体积、本钱等⽅⾯的竞赛优势。
XW-ADU5650姿态⽅位组合导航系统,由微惯性丈量单元、双天线定位定向单元、组合导航解算单元、接纳天线四部分组成。
mems微惯导GPS组合惯导系统⾸要技能⽬标(1)系统⽬标航向精度:0.2°/L(L为天线基线长度)俯仰精度:0.1°横滚精度:0.1°⽅位精度:2m分量 500g尺度132x68x79mm电源12VDC额外(9-15VDC)作业温度-40℃~ +75℃振荡 5g rms (20Hz to 2kHz, random)冲击 200g PK ½ sine 2 msec(2)陀螺仪量程 ±100°/s零位误差 ≤0.15°/s零偏稳定性 5°/h零侧重复性 0.15°/s噪声 0.01°/s带宽 50Hz(3)加速度计量程 ±2g(±10g可选 optional)零位误差 ≤0.005g零偏稳定性 ≤1mg零侧重复性 ≤0.001g。
命题教师:1.出题用小四号、宋体输入打印, 纸张大小为8K.考 生:1.不得用红色笔,铅笔答题,不得在试题纸外的其他纸张上答题,否则试卷无效。
2.参加同卷考试的学生必须在“备注”栏中填写“同卷”字样。
3.考试作弊者,给予留校察看处分;叫他人代考或代他人考试者,双方均给予开除学籍处理。
并取消授予学士学位资格,该科成绩以零分记。
MEMS 陀螺仪简介及其应用杨永 110204116摘要:自陀螺仪问世,因其独特的性能,广泛地应用于航海、航空、航天以及国民经济等领域。
陀螺及其相关技术一直是各国重点发展的技术之一,发展十分迅速。
迄今为止,陀螺仪从传统的刚体转子陀螺仪到新型的固态陀螺仪,种类十分繁多。
液浮陀螺、静电陀螺和动力调谐陀螺是技术成熟的三种刚体转子陀螺仪,达到了精密仪器领域内的高技术水平。
随着光电技术、微米/纳米技术的发展,新型陀螺仪如激光陀螺、光纤陀螺和微机械陀螺应运而生。
它们都是广义上的陀螺仪,是根据近代物理学原理制成的具有陀螺效应的传感器。
因其无活动部件,称为固态陀螺仪。
这种新型全固态的陀螺仪将成为未来的主导产品,具有广泛的发展前途和应用前景。
关键词: MEMS ;陀螺仪;光学陀螺;微机械陀螺1.MEMS 概述MEMS 是英文Micro Electro Mechanical systems 的缩写,即微电子机械系统。
微电子机械系统(MEMS)技术是建立在微米/纳米技术(micro/nanotechnology )基础上的 21世纪前沿技术,是指对微米/纳米材料进行设计、加工、制造、测量和控制的技术。
它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。
这种微电子机械系统不仅能够采集、处理与发送信息或指令,还能够按照所获取的信息自主地或根据外部的指令采取行动。
它用微电子技术和微加工技术(包括硅体微加工、硅表面微加工、LIGA 和晶片键合等技术)相结合的制造工艺,制造出各种性能优异、价格低廉、微型化的传感器、执行器、驱动器和微系统。
传感器在航空航天中的应用目录一.传感器的定义二.传感器在航空航天中的作用及其特点三.陀螺仪四.各种传感器在航空航天中的应用五.近期我国航天测控传感器的发展及应用六.未来航天测控传感器的发展趋势七.我国航天测控传感器未来发展设想八.结束语一.传感器的定义1.传感器的定义(transducer / sensor)国家标准GB7665-87对传感器下的定义是:“能感受规定的被测量并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。
传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
它是实现自动检测和自动控制的首要环节。
二.传感器在航空航天中的作用航空航天用传感器的特点1.传感器在航空航天中的作用:(1)航空航天中需要传感器敏感的参数(2)敏感参数在飞机和发动机自动控制中有重要作用(3)敏感参数在自动寻的和导航中有重要作用(4)敏感参数在飞机和发动机性能实验中有重要作用航空航天用传感器的特点传感器的性能和可靠性受工作条件的影响,而飞行界的工作条件十分恶劣和复杂,故航空航天用传感器的技术要求不同于其他领域用传感器的技术要求。
2.航空航天用传感器的特点:(1)飞机用传感器能在-60℃~+50℃正常工作,火箭用传感器应能在-80℃ ~+70℃正常工作。
(2)航空航天用传感器应具有良好的空气压力特性。
(3)航空航天用传感器应有良好的表面保护、密封和绝缘强度。
航空航天用传感器的特点(4)航空航天用传感器应有良好的抗振强度和耐冲击性能,安装时还应采取一定的减振和隔振措施(5)航空航天用传感器应具有耐恶劣环境的良好性能。
三.陀螺仪陀螺仪:是一种用来传感与维持方向的装置,基于角动量守恒的理论设计出来的。
陀螺仪主要是由一个位于轴心且可旋转的轮子构成。
陀螺仪一旦开始旋转,由于轮子的角动量,陀螺仪有抗拒方向改变的趋向。