双波谐波传动(可控制的动态图)
- 格式:pps
- 大小:219.50 KB
- 文档页数:21
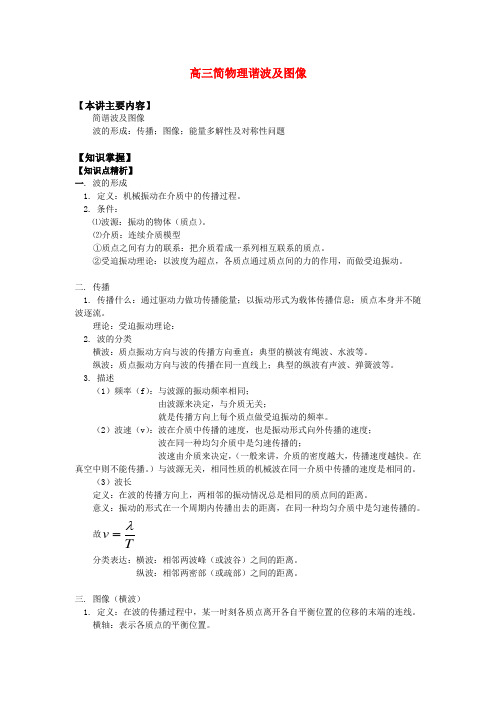
高三简物理谐波及图像【本讲主要内容】简谐波及图像波的形成:传播;图像;能量多解性及对称性问题【知识掌握】【知识点精析】一. 波的形成1. 定义:机械振动在介质中的传播过程。
2. 条件:⑴波源:振动的物体(质点)。
⑵介质:连续介质模型①质点之间有力的联系:把介质看成一系列相互联系的质点。
②受迫振动理论:以波度为超点,各质点通过质点间的力的作用,而做受迫振动。
二. 传播1. 传播什么:通过驱动力做功传播能量;以振动形式为载体传播信息;质点本身并不随波逐流。
理论:受迫振动理论:2. 波的分类横波:质点振动方向与波的传播方向垂直;典型的横波有绳波、水波等。
纵波:质点振动方向与波的传播在同一直线上;典型的纵波有声波、弹簧波等。
3. 描述(1)频率(f ):与波源的振动频率相同;由波源来决定,与介质无关;就是传播方向上每个质点做受迫振动的频率。
(2)波速(v ):波在介质中传播的速度,也是振动形式向外传播的速度;波在同一种均匀介质中是匀速传播的;波速由介质来决定,(一般来讲,介质的密度越大,传播速度越快。
在真空中则不能传播。
)与波源无关,相同性质的机械波在同一介质中传播的速度是相同的。
(3)波长定义:在波的传播方向上,两相邻的振动情况总是相同的质点间的距离。
意义:振动的形式在一个周期内传播出去的距离,在同一种均匀介质中是匀速传播的。
故v T λ=分类表达:横波:相邻两波峰(或波谷)之间的距离。
纵波:相邻两密部(或疏部)之间的距离。
三. 图像(横波)1. 定义:在波的传播过程中,某一时刻各质点离开各自平衡位置的位移的末端的连线。
横轴:表示各质点的平衡位置。
2. 规律:即形状为波浪线(正、余弦线)。
3. 意义:①描述在该时刻各质点的位移:即在横轴上找到它们的平衡位置所对应的纵坐标,既能表达大小,也能表示方向。
②表达振动的强弱,即振幅:同时也标志着能量的多少。
③表达波长:体现周期性、重复性、对称性。
④借助波的传播方向能够比较各质点在该时刻的速度方向、大小及变化。
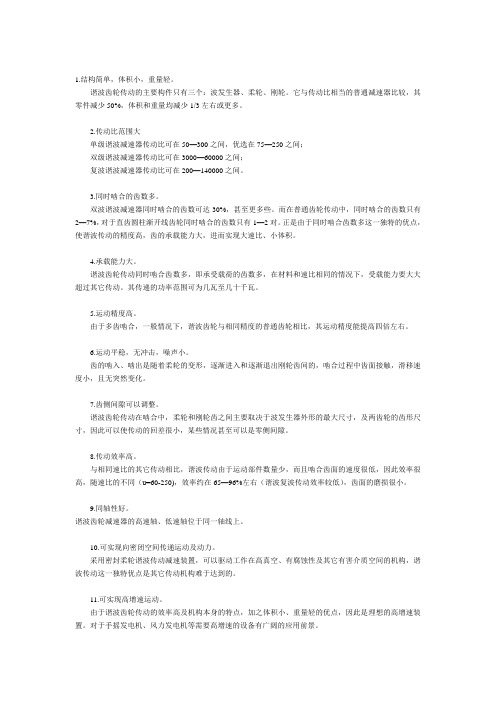
1.结构简单,体积小,重量轻。
谐波齿轮传动的主要构件只有三个:波发生器、柔轮、刚轮。
它与传动比相当的普通减速器比较,其零件减少50%,体积和重量均减少1/3左右或更多。
2.传动比范围大单级谐波减速器传动比可在50—300之间,优选在75—250之间;双级谐波减速器传动比可在3000—60000之间;复波谐波减速器传动比可在200—140000之间。
3.同时啮合的齿数多。
双波谐波减速器同时啮合的齿数可达30%,甚至更多些。
而在普通齿轮传动中,同时啮合的齿数只有2—7%,对于直齿圆柱渐开线齿轮同时啮合的齿数只有1—2对。
正是由于同时啮合齿数多这一独特的优点,使谐波传动的精度高,齿的承载能力大,进而实现大速比、小体积。
4.承载能力大。
谐波齿轮传动同时啮合齿数多,即承受载荷的齿数多,在材料和速比相同的情况下,受载能力要大大超过其它传动。
其传递的功率范围可为几瓦至几十千瓦。
5.运动精度高。
由于多齿啮合,一般情况下,谐波齿轮与相同精度的普通齿轮相比,其运动精度能提高四倍左右。
6.运动平稳,无冲击,噪声小。
齿的啮入、啮出是随着柔轮的变形,逐渐进入和逐渐退出刚轮齿间的,啮合过程中齿面接触,滑移速度小,且无突然变化。
7.齿侧间隙可以调整。
谐波齿轮传动在啮合中,柔轮和刚轮齿之间主要取决于波发生器外形的最大尺寸,及两齿轮的齿形尺寸,因此可以使传动的回差很小,某些情况甚至可以是零侧间隙。
8.传动效率高。
与相同速比的其它传动相比,谐波传动由于运动部件数量少,而且啮合齿面的速度很低,因此效率很高,随速比的不同(u=60-250),效率约在65—96%左右(谐波复波传动效率较低),齿面的磨损很小。
9.同轴性好。
谐波齿轮减速器的高速轴、低速轴位于同一轴线上。
10.可实现向密闭空间传递运动及动力。
采用密封柔轮谐波传动减速装置,可以驱动工作在高真空、有腐蚀性及其它有害介质空间的机构,谐波传动这一独特优点是其它传动机构难于达到的。
11.可实现高增速运动。


全国自考(机电一体化系统设计)-试卷4(总分58, 做题时间90分钟)1. 单项选择题1.输入和输出满足线性叠加原理的系统称为【】SSS_SINGLE_SELA 线性系统B 非线性系统C 时变系统D 随机系统分值: 2答案:A2.齿轮系传动比最佳分配条件为【】SSS_SINGLE_SELABCD分值: 2答案:A3.某光栅的光栅条纹的夹角为0.01rad,栅距为0.1mm,则莫尔条纹的宽度为【】SSS_SINGLE_SELA 2.5mmB 5mmC 7.5mmD 10mm分值: 2答案:D4.码盘式转速传感器采用增量式编码器直接连接到转轴上,产生一系列脉冲,从而得到【】SSS_SINGLE_SELA 电压信号B 数字式电流信号C 电流信号D 数字式速度信号分值: 2答案:D5.交流感应电动机的转子结构的种类有【】SSS_SINGLE_SELA 1利B 2种C 3利D 4种分值: 2答案:B6.超声波电动机可简记为【】SSS_SINGLE_SELA PWMB FMSC CAMD USM分值: 2答案:D解析:USM是超声波电动机的简写,FMS是柔性制造系统的简写,CAM是计算机辅助制造的简写,PWM是脉冲宽度调制的简写。
7.步进电动机控制系统是一种【】SSS_SINGLE_SELA 开环控制系统B 闭环控制系统C 半闭环控制系统D 前馈控制系统分值: 2答案:A8.三相反应式步进电动机转子有12个齿,双三拍通电时,其步距角为【】SSS_SINGLE_SELA 2.5°B 5°C 10°D 20°分值: 2答案:C解析:考查步距角计算公式为θ=,双三拍通电时,通电方式系数为s=。
1,即θs9.利用DDA法实现直线插补。
采用常速度分布实现直线运动控制指令时,步进电动机的参考脉冲指令是【】SSS_SINGLE_SELA 位置寄存器的溢出脉泔B 速度寄存器的溢出脉冲C 时钟信号D 加速度寄存器的溢出脉冲分值: 2答案:A10.Y的布尔代数方程为:Y=()C,则当A发生时,Y 【】SSS_SINGLE_SELA 肯定发生B 肯定不发生C 取决于CD 可能发生也可能不发生分值: 2答案:D解析:由题方程知,当A发生时,B不发生且C发生时,Y才发生。


设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
按ESC返回, 正转↓,反转↑ 连续动画:按键不松手,点动:单击键
双波谐波传动
设计:潘存云教授
版权所有作者:潘存云教授。