机械设计基础第二版(陈晓南_杨培林)题解
- 格式:doc
- 大小:804.94 KB
- 文档页数:31
机械设计基础第二版题解《机械设计基础(第二版)》题解第一章:机械设计基础概述该章主要介绍了机械设计的概念、基本原则、设计流程和方法等内容。
其中提到的机械设计的基本原则包括功能可靠性、工程经济性、结构合理性和工艺可行性等,这些原则是进行机械设计时必须遵循的基本要求。
在机械设计的流程中,包括目标确定、问题分析、方案选择、详细设计和优化等环节。
此外,本章还介绍了几种常用的机械设计方法,如参数法、几何法和模块法等。
第二章:材料力学基础该章主要介绍了材料力学的基本原理和方法。
其中涉及到材料的弹性力学、塑性力学和疲劳寿命等内容。
在机械设计过程中,对材料力学的基本原理和计算方法有一定的了解,可以帮助选取合适的材料和进行合理的材料使用。
第三章:零件设计基础该章主要介绍了机械零件设计的基本知识和方法。
其中包括零件的功能要求、尺寸与公差、形位公差和配合与间隙等内容。
在零件设计中,需要充分考虑零件的功能和使用要求,并合理确定尺寸与公差以及形位公差,以确保零件的功能和可靠性。
第四章:连接零件设计该章主要介绍了机械连接件的设计原理和方法。
其中包括螺纹连接、销连接、键连接、轴环连接和法兰连接等常用的连接方式。
在连接件的设计过程中,需要根据具体的工作条件和要求,选择合适的连接方案,并对连接件进行合理的设计和计算。
第五章:机械传动基础该章主要介绍了机械传动的基本原理和方法。
其中包括齿轮传动、带传动和链传动等常见的传动方式。
在机械传动的设计中,需要根据传动的要求和工况,选择合适的传动方式,并进行传动比的计算和齿轮的设计。
第六章:机械强度基础该章主要介绍了机械强度的基本原理和计算方法。
其中包括受力分析、应力分析和安全系数的计算等内容。
在机械设计中,需要对受力情况进行准确的分析,并进行应力计算和安全系数的评估,以确保机械的强度和可靠性。
第七章:机械零件的选料与计算该章主要介绍了机械零件的选料和计算方法。
其中包括轴、轴承、弹簧和润滑剂等常见零件的选料和计算。
机械设计基础课后习题与答案机械设计基础1-5至1-12 指出机构运动简图中的复合铰链、局部自度和虚约束,计算各机构的自度,并判断是否具有确定的运动。
1-5 解F=3n?2PL?PH=3?6?2?8?1=1 1-6 解F=3n?2PL?PH=3?8?2?11?1=1 1-7 解F=3n?2PL?PH=3?8?2?11?0=2 1-8 解F=3n?2PL?PH=3?6?2?8?1=1 1-9 解F=3n?2PL?PH=3?4?2?4?2=2 1-10 解F=3n?2PL?PH=3?9?2?12?2=1 1-11 解F=3n?2PL?PH=3?4?2?4?2=2 1-12 解F=3n?2PL?PH=3?3?2?3?0=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答: a )40?110?150?70?90?160,且最短杆为机架,因此是双曲柄机构。
b )45?120?165?100?70?170,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )60?100?160?70?62?132,不满足杆长条件,因此是双摇杆机构。
d )50?100?150?100?90?190,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
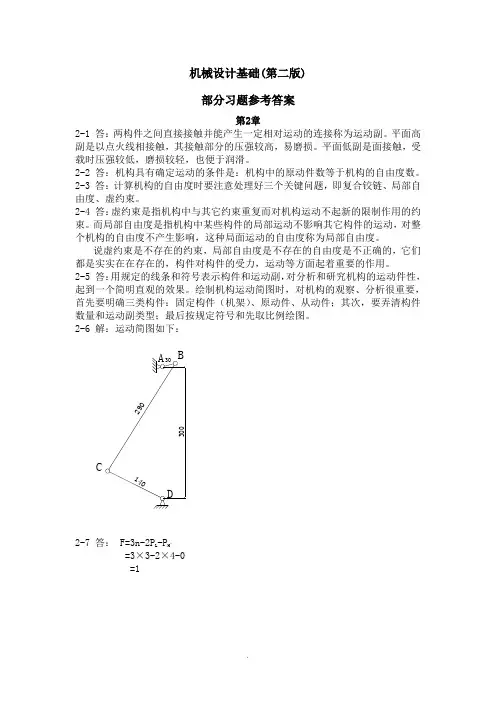
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD在水平位置上下各摆10度,且lCD?500mm,lAD?1000mm。
试用图解法求曲柄AB和连杆BC的长度;用式和式’计算此机构的最小传动角。
题2-5图解: 题意踏板CD在水平位置上下摆动10?,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
取适当比例图尺,作出两次极限位置AB1C1D和。
图量得:AC1?1037mm,AC2?1193mm。
AB2C2D解得:l1?l2?12121212?AC2?AC2?AC1??AC1?? 1193?1193?1037?1037??78mm ??1115mm 已知和上步求解可知:l1?78mm,l2?1115mm,l3?500mm,l4?1000mm 因最小传动角位于曲柄与机架两次共线位置,因此取??0和??180?代入公式计算可得:cos?BCD??l2?l3?l1?l4?2l1l4cos?2l2l3222 22 = 11152?500?78?100022?2?78?1000cos0?2 ?1115?500= ?BCD?? 或:cos?BCD?l2?l3?l1?l4?2l1l4cos?2l2l32222 =11152?5002?78?100022?2?78?1000cos18 0?2?1115?500= ?BCD?? 代入公式′,可知?min??BCD?? 3-1 题3-1图所示为一偏置直动从动件盘形凸轮机构。
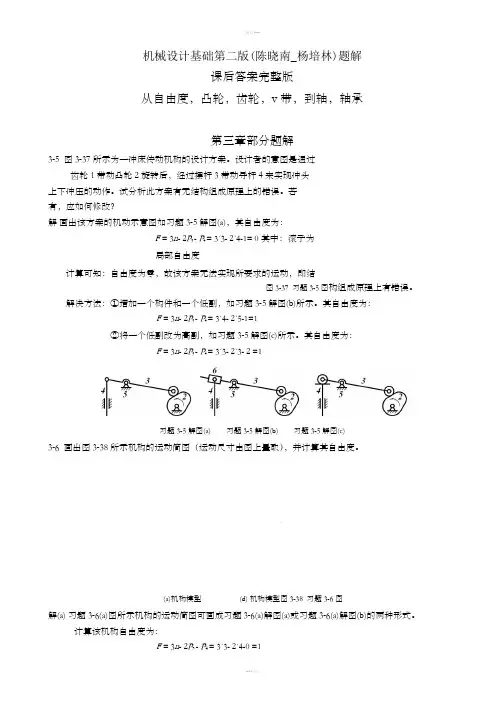
机械设计基础第二版(陈晓南_杨培林)题解课后答案完整版从自由度,凸轮,齿轮,v带,到轴,轴承第三章部分题解3-5 图 3-37 所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮 1 带动凸轮 2 旋转后,经过摆杆 3 带动导杆 4 来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?解画出该方案的机动示意图如习题 3-5 解图(a),其自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-1= 0其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结图 3-37 习题 3-5 图构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题 3-5 解图(b)所示。
其自由度为:F = 3n- 2P5 - P4 = 3´4- 2´5-1=1②将一个低副改为高副,如习题 3-5 解图(c)所示。
其自由度为:F = 3n- 2P5 - P4 = 3´3- 2´3- 2 =1习题 3-5 解图(a) 习题 3-5 解图(b) 习题 3-5 解图(c)3-6 画出图 3-38 所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
(a)机构模型 (d) 机构模型图 3-38 习题 3-6 图解(a) 习题 3-6(a)图所示机构的运动简图可画成习题 3-6(a)解图(a)或习题 3-6(a)解图(b)的两种形式。
计算该机构自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-0 =1习题 3-6(a)解图(a) 习题 3-6(a)解图(b)解(d) 习题 3-6(d)图所示机构的运动简图可画成习题 3-6(d)解图(a)、习题 3-6(d)解图(b)、习题 3-6(d)解图(c) 等多种形式。
- 1 -计算该机构自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-0 =1习题3-6(d)解图(a) 习题 3-6(d)解图(b) 习题 3-6(d)解图(c)3-7 计算图 3-39 所示机构的自由度,并说明各机构应有的原动件数目。
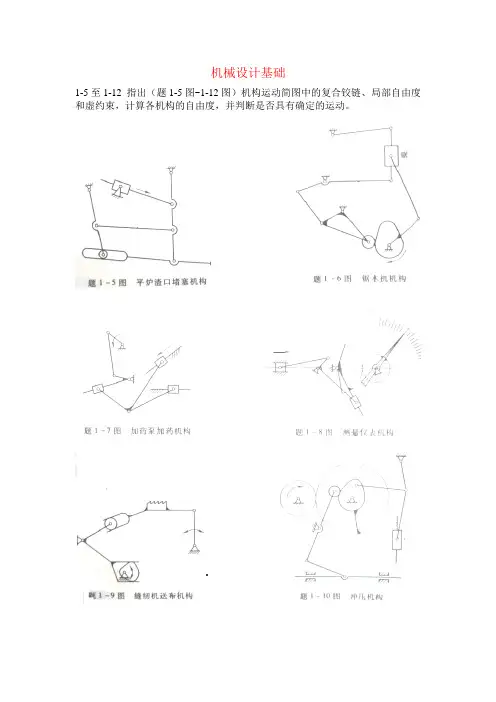
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)(7)(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A(8)A (9)A (10)A (11)A (12)A (13)Aa)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p-p h=3×9-2×12-2=1lf)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2×5二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√(7)A(8)C (9)A (10)A (11)A (12)C (13)C (14)A(15)A (16)A (17)A (18)A (19)A (20)A (21)A2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆或以l0<l ABAB BC CD AD AB(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB 杆为中间杆(300mm ≤l AB ≤500mm )时,l AD +l BC >l CD +l AB ,由此可得300mm ≤l AB <450mm ③AB 杆为最长杆(500mm ≤l AB <1150mm )时,l AB +l AD >l CD +l BC ,由此可得550mm<l AB <1150mm 由此可知:150mm<l AB <450 mm ,550mm<l AB <1150 mm(3)双曲柄机构500mm 550mm 2-8 解:用作图法求解,主要步骤:(1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A、D、C三点,如图所示(4)连接AC,以AC为边作?角的另一角边线,与以D为圆心、摇杆DC为半径的圆弧相交于C1和C2点,连接DC1和DC2得摇杆的另一极限位置(两个)(5)从图中量得AC=71mm,AC1=26mm,AC2=170mm(3)根据比例尺和已知条件定出滑块的两极限位置C1、C2两点,如图所示(4)连接C1C2,以C1C2为直角边作直角三角形C1C2P,使∠C1C2P=90°-θ=73.6°(5)以C2P为直径作圆O(6)将C1C2偏移e值,与圆O交于A点,连接AC1和AC2,(7)从图中量得AC 1=34mm ,AC 2=82mm ,则:24mm 212=⨯=AC AC l AB -μ,58mm 221=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为24mm 和58mm 。
《机械设计基础》部分习题答案第一章1-1.各种机器尽管有着不同的形式、构造和用途,然而都具有下列三个共同特征:①机器是人为的多种实体的组合;②各部分之间具有确定的相对运动;③能完成有效的机械功或变换机械能。
机器是由一个或几个机构组成的,机构仅具有机器的前两个特征,它被用来传递运动或变换运动形式。
若单纯从结构和运动的观点看,机器和机构并无区别,因此,通常把机器和机构统称为机械。
1-2. 都是机器。
1-3.①杀车机构;有手柄、软轴、刹车片等。
②驱动机构;有脚踏板、链条、链轮后轴,前轴等。
第二章2-2.问题一:绘制机构运动简图的目的是便于机构设计和分析。
问题二:(1)分析机构的运动原理和结构情况,确定其原动件、机架、执行部分和传动部分。
(2)沿着运动传递路线,逐一分析每个构件间相对运动的性质,以确定运动副的类型和数目。
(3)选择视图平面,通常可选择机械中多数构件的运动平面为视图平面,必要时也可选择两个或两个以上的视图平面,然后将其画到同一图面上。
(4)选择适当的比例尺,定出各运动副的相对位置,并用各运动副的代表符号、常用机构的运动简图符号和简单的线条来绘制机构运动简图。
(5)从原动件开始,按传动顺序标出各构件的编号和运动副的代号。
在原动件上标出箭头以表示其运动方向。
问题三:机构具有确定运动的条件是:F>0,机构原动件的数目等于机构自由度的数目。
2-3.答:铰链四杆机构有三种类型:它们是曲柄摇杆机构、双曲柄机构和双摇杆机构。
铰链四杆机构具有曲柄的条件是:(1)最短杆与最长杆长度之和小于或等于其余两杆长度之和;(2)连架杆和机架中必有一杆是最短杆。
根据曲柄存在条件还可得到如下推论:1)当最短杆与最长杆长度之和大于其余两杆长度之和时,则不论取何杆为机架,都只能得到双摇杆机构。
2)若四杆机构中最短杆与最长杆之和小于或等于其余两杆之和,当最短杆的邻边是机架时,机构成为曲柄摇杆机构;当最短杆本身为机架时成为双曲柄机构;当最短杆是连杆时成为双摇杆机构。
第十三章习题册参考答案绪论0-1 判断题(1)×(2)×(3)×(4)√(5)√(6)×(7)×0-2 填空题(1)确定的相对(2)机械(3)零件(4)构件0-3 选择题(1)A (2)A (3)A (4)A (5)A一、机构的自由度1-1 判断题(1)×(2)√(3)×(4)×(5)×(6)×(7)√(8)√(9)×(10)√(11)√(12)×(13)×(14)×1-2 填空题(1)运动副(2)独立(3)2 (4)低(5)机构自由度(6)机架1-3 选择题(1)A (2)A (3)A (4)A (5)A (6)A (7)A(8)A (9)A (10)A (11)A (12)A (13)A1-4 解:a)F=3n-2p l-p h=3×3-2×4-0=1b)F=3n-2p l-p h=3×5-2×7-0=1c)F=3n-2p l-p h=3×3-2×4-0=1d)F=3n-2p l-p h=3×3-2×4-0=1e)F=3n-2p l-p h=3×3-2×4-0=1f)F=3n-2p l-p h=3×3-2×4-0=1g)F=3n-2p l-p h=3×3-2×4-0=11-5 解:a)F=3n-2p l-p h =3×5-2×7-0=1b)滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c)E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d)F=3n-2p l-p h=3×6-2×8-1=1e)滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f)齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g)F=3n-2p l-p h=3×3-2×3-0=3h)滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i)中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1j)左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=11-6 解:a)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0b)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0c)该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d)该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题(1)×(2)×(3)√(4)×(5)√(6)×(7)√(8)√(9)√(10)×(11)×(12)√(13)×(14)×(15)√(16)×(17)×(18)√(19)×(20)√(21)×(22)×(23)×(24)×(25)√2-2 填空题(1)低(2)转动(3)3 (4)连杆,连架杆(5)曲柄,摇杆(6)最短(7)曲柄摇杆(8)摇杆,连杆(9)2 (10)>(11)运动不确定(12)非工作时间(13)惯性(14)大(15)中的摆动导杆机构有,中的转动导杆机构无(16)机架(17)曲柄(18)曲柄滑块(19)双摇杆(20)双曲柄机构(21)无,有2-3 选择题(1)A (2)C (3)B (4)A (5)B (6)B (7)A(8)C (9)A (10)A (11)A (12)C (13)C (14)A(15)A (16)A (17)A (18)A (19)A (20)A (21)A2-4 解:a)双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b)曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c)双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d)双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:(1)由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在(2)以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:(1)曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆(0<l AB≤300 mm)且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm(2)双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆(0<l AB≤300mm)时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC>l CD+l AB,由此可得300mm≤l AB<450mm③AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm(3)双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆(300mm≤l AB≤500mm)时,l AD+l BC≤l CD+ l AB,由此可得450mm≤l AB≤500mm②AB杆为最长杆(500mm≤l AB<1150mm)时,l AB+l AD≤l CD+l BC,由此可得500mm≤l AB≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a )b )c )d )e )各机构压力角和传动角如图所示,图a)、d )机构无死点位置,图b)、c )、e )机构有死点位置 2-8 解:用作图法求解,主要步骤:(1)计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ (2)取比例尺μ=0.001m/mm(3)根据比例尺和已知条件定出A 、D 、C 三点,如图所示(4)连接AC ,以AC 为边作θ角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置(两个)(5)从图中量得AC =71mm ,AC 1=26mm ,AC 2=170mm(6)当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ (7)当摇杆的另一极限位置位于DC 1时: 5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为22.5mm 、48.5mm 和49.5mm 、120.5mm 。
机械设计基础第二版(晓南_培林)题解课后答案完整版从自由度,凸轮,齿轮,v带,到轴,轴承第三章部分题解3-5 图3-37 所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1 带动凸轮2 旋转后,经过摆杆3 带动导杆4 来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?解画出该方案的机动示意图如习题3-5 解图(a),其自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-1= 0其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结图3-37 习题3-5 图构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5 解图(b)所示。
其自由度为:F = 3n- 2P5 - P4 = 3´4- 2´5-1=1②将一个低副改为高副,如习题3-5 解图(c)所示。
其自由度为:F = 3n- 2P5 - P4 = 3´3- 2´3- 2 =1习题3-5 解图(a)习题3-5 解图(b)习题3-5 解图(c)3-6 画出图3-38 所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
(a)机构模型 (d) 机构模型图3-38 习题3-6 图解(a)习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
计算该机构自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-0 =1习题3-6(a)解图(a)习题3-6(a)解图(b)解(d)习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)、习题3-6(d)解图(b)、习题3-6(d)解图(c) 等多种形式。
- 1 -计算该机构自由度为:F = 3n- 2P5 - P4 = 3´3- 2´4-0 =1习题3-6(d)解图(a) 习题3-6(d)解图(b) 习题3-6(d)解图(c)3-7 计算图3-39 所示机构的自由度,并说明各机构应有的原动件数目。
解(a) F = 3n- 2P5 - P4 = 3´7 - 2´10-0 =1A、B、C、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE=BC=CD=DE,AB=AD,AF=CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b) F = 3n- 2P5 - P4 = 3´5- 2´7 -0 =1B 为复合铰链,移动副E、F 中有一个是虚约束原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
剪切时剪刀的水平运动速度与被剪物体的水平运动速度相等,以防止较厚的被剪物体的压缩或拉伸。
解(c)方法一:将△FHI 看作一个构件F = 3n- 2P5 - P4 = 3´10- 2´14-0 = 2B、C 为复合铰链原动件数目应为2方法二:将FI、FH、HI 看作为三个独立的构件F = 3n- 2P5 - P4 = 3´12- 2´17 -0 = 2B、C、F、H、I 为复合铰链原动件数目应为2说明:该机构为剪板机机构,两个剪刀刀口安装在两个滑块上,主动件分别为构件AB 和DE。
剪切时仅有一个主动件运动,用于控制两滑块的剪切运动。
而另一个主动件则用于控制剪刀的开口度,以适应不同厚度的物体。
解(d) F = (3-1)n-(2-1)P5 = (3-1)´3-(2-1)´5 =1原动件数目应为1说明:该机构为全移动副机构(楔块机构),其公共约束数为1,即所有构件均受到不能绕垂直于图面轴线转动的约束。
解(e) F = 3n- 2P5 - P4 = 3´3- 2´3-0 = 3原动件数目应为3说明:该机构为机械手机构,机械手头部装有弹簧夹手,以便夹取物体。
三个构件分别由三个独立的电动机驱动,以满足弹簧夹手的位姿要求。
弹簧夹手与构件3 在机构运动时无相对运动,故应为同一构件。
23-10 找出图3-42 所示机构在图示位置时的所有瞬心。
若已知构件1 的角速度w1 ,试求图中机构所示位置时构件3 的速度或角速度(用表达式表示)。
解(a)v3 = v P13 =w1l P13P14 (←)解(b)v3 = v P13 =w1l P13P14 (↓)解(c)∵ v P13 =w1l P13P14 =w3l P13P34 (↑)解(d)v3 = v P13 =w1l P13P14 (↑)l P13P14 ( )∴ w3 = w1lP13P343第六章部分题解参考6-9 试根据图 6-52 中注明的尺寸判断各铰链四杆机构的类型。
图 6-52 习题 6-9 图解 (a) ∵ l max +l min =110+ 40 =150 <S l 其余= 90+ 70 =160最短杆为机架∴ 该机构为双曲柄机构(b) ∵ l max +l min =120+ 45 =165<S l 其余=100+ 70 =170 最短杆邻边为机架∴ 该机构为曲柄摇杆机构(c) ∵ l max +l min =100+50 =150>S l 其余= 70+ 60 =130∴ 该机构为双摇杆机构(d) ∵ l max +l min =100+50 =150<S l 其余= 90+ 70 =160 最短杆对边为机架∴ 该机构为双摇杆机构6-10 在图 6-53 所示的四杆机构中,若a =17 ,c = 8,d = 21。
则 b 在什么围时机构有曲柄存在?它是哪个构件?解 分析:⑴根据曲柄存在条件②,若存在曲柄,则 b 不能小于 c ;若 b =c ,则不满足曲柄存在条件①。
所以 b 一定大于 c 。
⑵若 b >c ,则四杆中 c 为最短杆,若有曲柄,则一定是 C D 杆。
b >d : l max +l min = b +c ≤S l 其余= a + d图 6-53 习题 6-10 图∴ b ≤a + d -c =17 + 21-8 = 30 b <d :l max +l min = d +c ≤S l 其余= a +b ∴ b ≥d +c -a = 21+8-17 =12结论:12≤b ≤30 时机构有曲柄存在,C D 杆为曲柄6-13 设计一脚踏轧棉机的曲柄摇杆机构。
AD 在铅垂线上,要求踏板 CD 在水平位置上下各摆动10°,且l CD =500mm ,l AD =1000mm 。
试用图解法求曲柄 AB 和连杆 BC 的长度。
解 作图步骤:①按m l = 0.01 m/mm 比例,作出 A 、D 、C 、C 1 和 C 2 点。
②连接 AC 1、AC 2,以 A 为圆心 AC 1 为半径作圆交 AC 2 于 E 点。
③作 EC 2 的垂直平分线 n -n 交 EC 2 于 F 点,则 FC 2 的长度为曲柄 AB 的长度。
④作出机构运动简图 ABCD 及 B 1、B 2 点。
⑤测量必要的长度尺寸,得到设计结果。
注:以上作图步骤可以不写出,但图中必须保留所有的作图线条。
l AB =m l AB = 0.01´8 = 0.08 m = 80 mm (计算值:77.85 mm )l BC =m l BC = 0.01´112 =1.12 m =1120 mm (计算值:1115.32 mm )图 6-56 习题 6-13 图习题 6-13 解图 6-14 设计一曲柄摇杆机构。
已知摇杆长度l 4 =100 mm ,摆角y = 450 ,行程速比系数 K =1.25 。
试根据g min解≥ 40o 的条件确定其余三杆的尺寸。
l AB =m l AB = 0.002´14.5 = 0.029 m = 29 mm (计算值:29 mm)l BC=m l BC = 0.002´73.5 = 0.147 m =147 mm (计算值:146.68 mm)g min= 33°(计算值:32.42°)不满足g min ≥40o 传力条件,重新设计l AB =m l AB = 0.002´17 = 0.034m = 34 mm (计算值:33.81 mm)l BC =m l BC =0.002´54.5 = 0.109 m =109 mm (计算值:108.63 mm)g min = 40°(计算值:40.16°)满足g min ≥ 40o 传力条件6-15 设计一导杆机构。
已知机架长度l1 =100 mm ,行程速比系数K =1.4 ,试用图解法求曲柄的长度。
K l AB =m l AB1 = 0.002´13 = 0.026 m = 26 mm(计算值:25.88 mm)6-16 设计一曲柄滑块机构。
如图6-57 所示,已知滑块的行程图6-57 习题6-16 图s = 50 mm ,偏距e =10 mm 。
行程速比系数K =1.4 。
试用作图法求出曲柄和连杆的长度。
l AB =m l AB2 = 0.001´23.5 = 0.0235 m = 23.5 mm (计算值:23.62 mm)l BC=m l B2C2 = 0.001´39.5 = 0.0395 m = 39.5 mm (计算值:39.47 mm)第七章部分题解参考7-10在图7-31 所示运动规律线图中,各段运动规律未表示完全,请根据给定部分补足其余部分(位移线图要求准确画出,速度和加速度线图可用示意图表示)。
图7-31 习题7-10 图解7-11一滚子对心移动从动件盘形凸轮机构,凸轮为一偏心轮,其半径R = 30mm,偏心距e =15mm ,滚子半径r k =10mm ,凸轮顺时针转动,角速度w为常数。
试求:⑴画出凸轮机构的运动简图。
⑵作出凸轮的理论廓线、基圆以及从动件位移曲线s ~j图。
解7-12按图7-32 所示位移曲线,设计尖端移动从动件盘形凸轮的廓线。
并分析最大压力角发生在何处(提示:从压力角公式来分析)。
v2 解由压力角计算公式:tan a=(r b + s)w∵ v2 、r b 、w均为常数∴ s = 0→ a=a max amax¢即j=0°、j=300°,此两位置压力角a最大图7-32 习题7-12 图7-13设计一滚子对心移动从动件盘形凸轮机构。
已知凸轮基圆半径r b = 40mm,滚子半径r k =10mm ;凸轮逆时针等速回转,从动件在推程中按余弦加速度规律运动,回程中按等加-等减速规律运动,从动件行程h = 32mm ;凸轮在一个循环中的转角为:j t =150°,j s = 30°,j h =120°,j s¢ = 60°,试绘制从动件位移线图和凸轮的廓线。