乐高创意机器人教程(中级上册10~16岁)变速箱
- 格式:pdf
- 大小:6.89 MB
- 文档页数:6

乐高机器人最简单的拼法乐高机器人是一种创意教育玩具,它能够帮助孩子们学习基础的编程和机器人控制技能。
在乐高机器人的世界里,有许多不同的拼法可以让孩子们体验到乐趣和学习的乐趣。
下面介绍一种最简单的乐高机器人拼法。
我们需要准备一些乐高积木。
这些积木包括不同形状和尺寸的积木,如长方体、正方体、圆柱体等。
我们还需要一些连接件,如轮胎、齿轮等。
这些积木和连接件可以通过拼插的方式组合在一起,形成不同的机器人结构。
接下来,我们可以开始组装机器人的身体部分。
首先,将两个长方体积木并排放置,作为机器人的主体。
然后,在主体的上方和两侧分别放置两个正方体积木,作为机器人的头部和手臂。
在头部的正方体上方,可以再放置一个正方体积木,作为机器人的头顶。
接着,我们可以为机器人安装一对轮子,使其能够移动。
将两个轮子连接到主体的底部,确保它们可以自由旋转。
此外,还可以在轮子旁边的侧面安装一对小齿轮,以便后续添加电机时可以更好地控制机器人的移动。
现在,我们可以为机器人添加一些感应器,使其能够感知周围的环境。
常见的感应器包括触碰传感器和颜色传感器。
触碰传感器可以用来检测机器人是否碰到了障碍物,而颜色传感器可以用来识别不同颜色的物体。
将感应器连接到机器人的主体上,并确保它们能够准确地感知到周围的环境。
我们可以为机器人添加一些动作和功能。
可以通过添加电机和程序来控制机器人的运动和行为。
电机可以用来驱动轮子和其他机械部件的运动,而程序则可以用来控制机器人按照特定的指令执行相应的动作。
通过编写简单的程序,我们可以让机器人前进、后退、转向等各种动作。
通过以上的步骤,我们就成功地组装了一台最简单的乐高机器人。
这个机器人可以感知周围的环境,并按照我们的指令执行不同的动作。
通过探索和编程这个机器人,孩子们可以培养创造力、逻辑思维和解决问题的能力。
乐高机器人的拼法有很多种,每一种拼法都可以创造出不同的机器人形态和功能。
孩子们可以根据自己的兴趣和想象力,自由组合乐高积木,创造出属于自己的独特机器人。
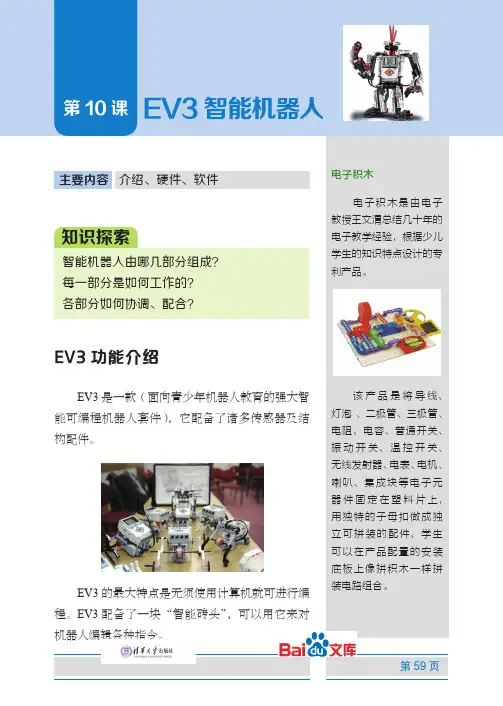
的最大特点是无须使用计算机就可进行编
配备了一块“智能砖头”,可以用它来对机器人编辑各种指令。
电子积木
电子积木是由电
教授王文渭总结几十年的电子教学经验,根据少儿学生的知识特点设计的专利产品。
该产品是将导线、灯泡、二极管、三极管、电阻、电容、普通开关、振动开关、温控开关、无线发射器、电表、电机、喇叭、集成块等电子元器件固定在塑料片上,用独特的子母扣做成独立可拼装的配件,学生可以在产品配置的安装底板上像拼积木一样拼。
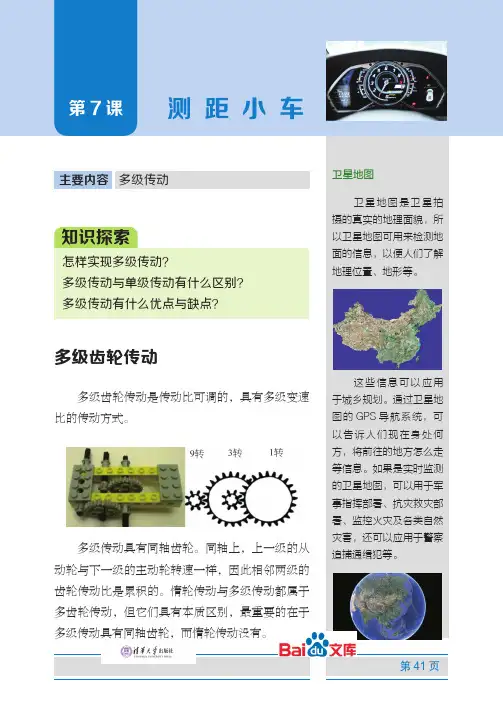
多级传动具有同轴齿轮。
同轴上,上一级的从动轮与下一级的主动轮转速一样,因此相邻两级的齿轮传动比是累积的。
惰轮传动与多级传动都属于多齿轮传动,但它们具有本质区别,最重要的在于多级传动具有同轴齿轮,而惰轮传动没有。
卫星地图
卫星地图是卫星拍摄的真实的地理面貌,所以卫星地图可用来检测地面的信息,以便人们了解地理位置、地形等。
这些信息可以应用于城乡规划。
通过卫星地图的GPS导航系统,可以告诉人们现在身处何方,将前往的地方怎么走等信息。
如果是实时监测的卫星地图,可以用于军事指挥部署、抗灾救灾部署、监控火灾及各类自然灾害,还可以应用于警察追捕通缉犯等。
41
第 页。
主要内容惯性与飞轮机构知识探索什么是惯性?什么是飞轮机构?飞轮机构与惯性有什么关系?惯性物体保持静止状态或匀速直线运动状态的性质称为惯性。
惯性是物体的一种固有属性,表现为物体对其运动状态变化的一种阻抗程度。
质量是对物体惯性大小的量度。
发条玩具发条玩具是以发条为动力装置的机动玩具的总称。
在18世纪,欧洲的一些钟表制造商把钟表设计成各种形象,并使机芯带动某些附件,使钟表除了走时外,还可以做出一些有趣的动作。
例如,猫头鹰挂钟上的“猫头鹰”眼睛能不断睁、闭,并定时发出鸣叫声。
第6课惯 性 车飞轮机构飞轮机构类似于发条机构,其作用如同一个能量储存器。
通过转动飞轮来给装置充能。
当放开装置以后,飞轮释放能量,从而带动装置运动。
飞轮与惯性飞轮又叫惯性轮,即在一个轮轴上加装较重的轮(或在普通轮上加载重物),当轮转动起来之后,因质量较大,转动惯量大,转动不易停止,可以驱动车辆持续前进一段时间。
银河系银河系古称银河、天河、星河、天汉、银汉等,是太阳系所在的星系,属于棒旋星系。
银河系包括1000亿~ 4000亿颗恒星和大量的星团、星云,还有各种类型的星际气体和星际尘埃。
它的直径约为12万光年,中心厚度约为1.2万光年,可见物质总质量大约是太阳质量的1400亿倍。
惯性车的制作选用乐高零件来制作一辆飞轮车。
制作完成后,用手推动小车,看能否通过蓄能让其自主前行。
NXT的功能接口NXT有四个输入端口及三个输出端口,可外接马达、传感器等组件,如伺服马达、光电(颜色)传感器、声音传感器、触动传感器、超声波传感器和温度传感器。
拼装步骤思考与进步我们完成了飞轮车的制作。
用手推动飞轮车,观察飞轮车能走多远。
不加飞轮与加上飞轮,小车行驶有什么区别?哪种情况下,小车跑得更远?为什么装上飞轮后,小车能跑得更远? 车的动力是由上面的两个飞轮提供的。
由于飞轮具有惯性,转动起来会保持该状态,为轮子提供动力。
飞轮质量越大,转动时间越长,车子走得越远。

机器人乐高EV3变速车教案乐高EV3是一款非常受欢迎的机器人教育套装,它可以用来打造各种有趣的机器人,包括变速车。
变速车是一款能够自主调节行驶速度的机器人车辆,可以根据不同的场景和需要实现快速前进或者缓慢行驶的功能。
下面是一份关于乐高EV3变速车的教案,帮助你了解如何构建和编程变速车。
一、教学目标通过本节课的学习,学生将达到以下目标:1.了解乐高EV3的基本组件和连接方式;2.学会构建乐高EV3变速车的模型;3.掌握编程技巧,实现变速车的自主控制和速度调节。
二、教学准备1.乐高EV3教育套装;2.电脑、乐高EV3软件和USB线。
三、教学步骤步骤一:介绍乐高EV3的基本组件和连接方式(10分钟)1.向学生展示乐高EV3教育套装中的各个组件,如电机、传感器、齿轮等,并解释它们的作用和用途。
2.教学演示如何将电机、传感器等组件连接到乐高EV3控制器上,并让学生进行实际操作。
步骤二:构建乐高EV3变速车的模型(30分钟)1.向学生展示乐高EV3变速车的模型构建指南,并讲解构建步骤和注意事项。
2.提醒学生按照指南逐步构建模型,并在需要时进行调整和修正。
3.鼓励学生在模型构建过程中发挥自己的创造力和想象力,自由改变模型的外观或功能。
步骤三:编程变速车的控制和速度调节(40分钟)1.向学生介绍乐高EV3软件的基本操作和编程界面。
2.讲解如何编程实现变速车的自主控制和速度调节功能,并提供一些编程示例和技巧。
3.鼓励学生尝试编写自己的程序,实现不同的行驶方式或速度调节方法。
4.组织学生进行实际编程操作,并检查他们的编程结果。
步骤四:交流和展示(20分钟)1.鼓励学生分享他们编程的经验和学习成果,互相学习和交流。
2.组织学生进行变速车的比赛或展示,并评选出最佳设计和最出色的编程程序。
3.总结今天的学习内容,展望下一步的学习计划。
四、教学延伸1.学生可以继续进行编程实践,进一步提高乐高EV3变速车的性能和功能。
2.学生可以尝试使用其他传感器,如颜色传感器或陀螺仪传感器,实现更多的控制和调节功能。


机器人乐高EV3变速车教案第12课变速车【目标】1.电机旋转传感器2.测量距离3.计程车4.变速车【物品】乐高45544【授课】一.引入出租车是按里程计费的,假设你的小车是出租车,你怎么知道它跑了多远?有一样东西能知道,它叫电机旋转传感器。
二.新课1.电机旋转传感器①传感器是一类电子器件,它能知道外部的变化。
我们这里说的电机旋转传感器,它就能知道电机旋转了几圈或多少度。
在我们的零件箱子里,你找不到它,其实它藏在电机里面。
大型电机和中型电机里面都有旋转传感器。
②通过主机查看电机转了几圈或多少度。
EV3程序块→第3个选项卡→第1 个选项→B选项卡。
转动B口电机上的轮子,屏幕数字会变化。
压中间按钮可以设置是测量圈数还是度数,1圈=360度。
2.测量距离①用电机旋转传感器测量从甲地到乙地有多少圈或多少度,然后再编程验证。
②如,测量两地是500度,可以用如下程序验证你的测量是否正确。
3.计程车①让小车跑一段距离,屏幕上显示出跑了多远?②电机旋转传感器从开始计程的位置初始化。
明确是测量的圈数,还是度数。
显示模块要用“文本—网格”模式。
程序如下:4.变速车①通过手柄在小车运行时控制速度②拼装③程序a.直行变速车b.转圈变速车三.总结这节课我们学习了电机旋转传感器,它能知道电机转了多少圈或度。
利用这个特性,我们测量了两地的距离,实现了计程车和变速车的功能。
【后记】写下你的补遗、改进、创意和感想等。