不完整非对称性曲线线型优化及其坐标计算20页PPT
- 格式:ppt
- 大小:2.30 MB
- 文档页数:20
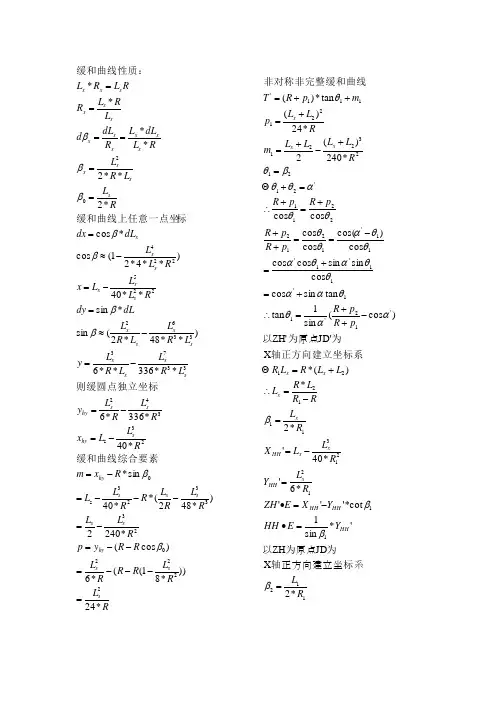
RL R L R R R L R R y p R L L R L R L R R L L R x m R L L x R L R L y L R L L R L y L R L L R L dLdy R L L L x R L L dL dx RL L R L RL dL L R dL d L R L R R L R L s s s hy ss ss s hy shy ss hy s xs x s xs x s xx s xxs sxx s xx x x x xs x s x x *24))*81((*6)cos (*2402)*482(**40sin **40*336*6**336**6)**48*2(sin *sin **40)**4*21(cos *cos *2**2****22220233323s 023s 3423373336222522402=---=--=-=---=-=-=-=-=-≈=-=-≈=======βββββββββ缓和曲线综合要素则缓圆点独立坐标标缓和曲线上任意一点坐缓和曲线性质:1121112213111221'12'11'11'1'11'12122211'212123221221111'*2轴正方向建立坐标系X 为JD 为原点ZH 以'*sin 1cot '*''*6'*40'*2*)(*轴X 为JD'为原点ZH'以)cos (sin 1tan tan sin cos cos sin sin cos cos cos )cos(cos cos cos cos *240)(2*24)(tan *)(R L Y E HH Y X E ZH R L Y R L L X R L RR L R L L L R L R p R p R p R p R p R p R R L L L L m RL L p m p R T HH HH HH xHH xx HH x x x x x x x ==∙-=∙=-==-=∴+=-++=∴+=+=-==+++=+∴=+=+-+=+=++=ββββααθθααθθαθαθθαθθθθαθθβθθ 正方向建立坐标系非对称非完整缓和曲线JDA A ZH T AF JD A E HH EF A HH AF E JD EF E ZH JD ZH E JD R L L Y A HH Y X A ZH R L Y R L L X x HHHH HH HH HH∙+∙=∴=∙∙-+∙=∙=∙-∙=∙--=-=-=-=-=∴+==∙-=∙=-=3664'''236354112155212212121311sin sin *中F -JD -A 在三角形sin sin *'||||'中F -JD'-E 在三角形*2*sin 1cot **6*40ββββββπβαπββαβββββββββ 改正数切线标高设计标高改正值:里程差为任一点与起点或终点)(变坡点标高切线标高设计标高变坡点高程又变坡点竖曲线起点±==-±=-==∴-==∴===-=Rx y x i x T TK E R E R E R L T R T E i i *2*K *88*2*2*2竖曲线222221ωωωω。
解析几何中“非对称”韦达定理的处理策略公开课教案教学设计课件资料第一章:韦达定理的基本概念与性质1.1 韦达定理的定义及几何意义1.2 韦达定理的适用范围及条件1.3 韦达定理与其他定理的联系与区别第二章:非对称韦达定理的提出2.1 非对称韦达定理的背景及意义2.2 非对称韦达定理的表述及证明2.3 非对称韦达定理与传统韦达定理的对比第三章:非对称韦达定理的处理策略3.1 转换法:将非对称问题转化为对称问题3.2 参数法:引入参数,简化非对称问题3.3 举例解析:运用非对称韦达定理解决实际问题第四章:非对称韦达定理在解析几何中的应用4.1 直线与圆的位置关系4.2 椭圆、双曲线、抛物线与直线的交点问题4.3 几何图形的面积、距离、角度等问题的求解第五章:课堂练习与拓展5.1 课堂练习题:巩固非对称韦达定理的基本应用5.2 拓展题目:探讨非对称韦达定理在更复杂问题中的应用5.3 答案与解析:对练习题及拓展题目进行解答和分析本教案旨在帮助学生掌握解析几何中非对称韦达定理的基本概念、性质和应用,培养学生运用非对称韦达定理解决实际问题的能力。
通过转换法、参数法等策略,使学生更好地理解和运用非对称韦达定理,提高解析几何解题水平。
第六章:非对称韦达定理与线性方程组6.1 线性方程组与非对称韦达定理的关系6.2 利用非对称韦达定理求解线性方程组6.3 实例分析:线性方程组在实际问题中的应用第七章:非对称韦达定理与函数性质7.1 非对称韦达定理与函数零点的关系7.2 利用非对称韦达定理分析函数的单调性、奇偶性7.3 实例分析:函数性质在实际问题中的应用第八章:非对称韦达定理与不等式8.1 非对称韦达定理与不等式的关系8.2 利用非对称韦达定理解决不等式问题8.3 实例分析:不等式在实际问题中的应用第九章:非对称韦达定理与解析几何中的优化问题9.1 解析几何中的优化问题概述9.2 利用非对称韦达定理解决优化问题9.3 实例分析:优化问题在实际问题中的应用第十章:总结与展望10.1 非对称韦达定理在解析几何中的地位与作用10.2 非对称韦达定理的进一步研究与发展10.3 课程回顾与拓展建议本教案后续五章旨在深入探讨非对称韦达定理在线性方程组、函数性质、不等式以及优化问题中的应用,帮助学生更好地理解和运用非对称韦达定理解决更广泛的数学问题。
非对称缓和曲线坐标计算程序CASIO fx-4800P QXZB曲线坐标计算CASIO4800 QXZB可计算不等缓和曲线、圆曲线上的任意中、边桩坐标:该程序适用于计算器 CASIO fx-4800P,可计算与线路中心成任意夹角的缓和曲线、圆曲线中、边桩坐标及待测点方位角和距离。
1、DK(JD)?输入交点桩号2、X(JD)?输入交点坐标X3、Y(JD)?输入交点坐标Y4、T1?输入第一切线长(如果只有一条切线两者都输入一致)5、T2?输入第二切线长(如果只有一条切线两者都输入一致)6、FWJ?输入直线方位角(ZH→JD)7、A?输入转角:左转为负,右转为正8、R?输入圆曲线半径9、LS1?输入第一缓和曲线长(如果只有一条缓和曲线两者都输入一致)10、LY?输入圆曲线长(L-LS1-LS2)11、LS2?输入第二缓和曲线长(如果只有一条缓和曲线两者都输入一致)12、X(ZJD)?输入置镜点坐标X13、Y(ZJD)?输入置镜点坐标Y14、JSDK?输入前视点里程15、PL?输入偏距16、PA?输入偏角程序下载地址:/blog/post/QXZB-4800.html评价答案好:18不好:1原创:18非原创:0菲メ帆ぅ回答采纳率:52.8% 2010-06-02 17:37满意答案好评率:57%(for Casio-fx4850)扩展变量操作(15个):Defm 15←┚ ( O为字母、0为数字)J-PQX (平面数据输入,自行切换到J-JSMS)Defm 15←┚A“JD” B“JDX” C“JDY” F“FWJ” O“A0:Z-,Y+” RE“LS1” K“LS2”:E<1=>E=1E-9⊿K<1=>K=1E-9⊿Z[1]=EE÷24R-E∧4÷2688RRR:Z[2]=E÷2-EEE÷240RR:X=(EE-KK)÷24R÷sin Abs O :“T1=”:Z[3]=(R+Z[1])tan(Abs O÷2)+Z[2]-X◢“T2=”:Z[4]=(R+KK÷24R-K∧4÷2688RRR)tan(Abs O ÷2)+K÷2-KKK÷240RR+X◢“L=”:L=Abs OπR÷180+(E+K)÷2◢J=tan-1((R+Z[1])÷(Z[3]-Z[2]):“E=”:X=(R+Z[1])÷sin J-R◢X=A-Z[3]:Y=X+E:E<1=>“ZY=”:X◢≠=> “ZH=”:X◢“HY=”:Y◢⊿ “QZ=”:Y =X+(L-K-E)÷2+E◢Y=X+L-K:X=X+L:K<1=> “YZ=”:X◢≠=> “YH=”:Y◢“HZ=”:X◢⊿Prog“J-JSMS” ←┚J-JSMS(放样模式主程序)“1-ZS, FY,3-FS”: Lb1 0:{Z}: Z“MS”≤2=>Goto 1: ≠=> Z≤4=> Goto2⊿⊿←┚Lb1 1 :Q“X-YIQI”S“Y-YIQI”T“X-HOUSI”U“Y-HOUSI”:{PDW}:P“F=”D“BZ=”W“BJ=”: Prog“JP”: Prog“FY”: Goto 1←┚Lb1 2 :{XYW}:XYW“BJ”: Prog“JF”: “P=”: P◢“BZ=”: D◢JP(平曲线正算子程序)Fixm←┚Lb1 1 :J=F:X= B-Z[3]cos F :Y= C-Z[3]sin F :G=E←┚P≤A-Z[3]=>I=A-Z[3]-P:M=-I:N=0:H=F+W:Goto 5←┚≠=>P≤A-Z[3]+E=>I=P-A+Z[3]:H=90II÷REπ:O<0=>H=-H⊿H=H+W+F:Goto 3←┚≠=>P≤A-Z[3]+L-K=>I=P-A+Z[3]-E:Goto 4: ≠=>Goto 2⊿⊿←┚Lb1 2 :X= B+Z[4]cos(F+O :Y= C+Z[4]sin(F+O :J=F+O+180:G=K←┚P≤A-Z[3]+L=>I=A-Z[3]+L-P:H=90II÷RKπ:O>0=>H=-H⊿H=H+J+W+180:Goto 3 ←┚≠=>I=P-A+Z[3]-L:M=-I:N=0:H=J+W+180:Goto 5 ←┚Lb1 3 :M=I-I∧5÷40RRGG:N=III÷6GR-I∧7÷336RRRGGG:Goto 5 ←┚Lb1 4 :H=(E+2I)×90÷πR:M=R sin H+Z[2]:N=R(1-cos H)+Z[1]:O<0=>H=-H⊿H=J+H+W: Goto 5←┚Lb1 5 :P≤A-Z[3]+L-K=> O<0=>N=-N⊿≠=>O>0=>N=-N⊿⊿Goto 6←┚Lb1 6 :X =X+M cos J-N sin J+D cos H:Y =Y+M sin J+N cos J+D sin H“X=”: X ◢“Y=”: Y ◢JF(平曲线反算子程序)Fixm←┚U=X:V=Y:D=0:J=F-W:P=A+(Y-C)cos J-(X-B)sin J←┚Lb1 1:Prog“JP”:J=H-180:I=(V-Y)cos J-(U-X)sin J:Abs I<1E-4=>Goto 2:≠=>P=P+I:Goto 1⊿←┚Lb2: D=(V-Y)÷sinHFY(放样计算子程序)Pol(T-Q,U-S):“HOUSI D=”:I◢J<0=>J=J+360⊿J>360=>J=J-360⊿“HOUSI J=”:J→DMS◢Pol(X-Q,Y-S):“I=”:I◢J<0=>J=J+360⊿J>360=>J=J-360⊿“J=”:J→DMS◢一、程序简介本套程序是共有2个主程序,3个子程序。

道路工程测量中非完整缓和曲线参数与坐标计算中建八局第三建设有限公司张涛摘要:在道路工程测量中,非完整缓和曲线的参数、坐标计算和测设是一个常见的难点和重点,掌握其特性及公式推导原理,对从业者非常重要和必要。
关键词:非完整缓和曲线曲线参数计算公式八匝道互通式立交一、概论工程测量学科是一门应用科学,它直接为国民经济建设和国防建设服务,紧密与生产实践相结合。
在大中型建设项目中,工程测量是一项极其重要的、专业性较强的基础性工作。
特别是在道路工程建设中,经常会遇到道路线形较为复杂,线元变化较多的情况,而测量成果的精度高低,直接影响到工程质量的好坏,测量工作的任何一次失误,都可能导致工程施工出现较大的偏差,从而引起工程局部返工甚至报废,并会延误工期,造成巨大地工程损失。
因此,在施工过程中,如何控制好工程测量的施作质量,从而使工程建设顺利优质地完成,是每一个工程测量工作者的首要职责。
当前,全国各地基础设施工程建设快速发展。
在一些高等级公路建设时,既要保证行车的安全性、便捷性和舒适性,保证道路线形平滑流畅,保证道路景观效果,同时又受到地形条件限制,必须最大限度地节约土地资源,所以设计者经常采用较为复杂的平曲线、竖曲线线形设计。
如在作者近期参建的重庆市渝中区环道隧道工程和机场专用快速路工程中,设计者就采用了多条非对称、非完整缓和曲线线形。
特别是机场专用快速路工程的桃子湾互通式立交桥八条匝道(匝道A---匝道H),包含多个非完整缓和曲线线元及小半径(最小半径R=55m)回头曲线。
在上述较为复杂的线形测设中,作者结合非完整缓和曲线特性和理论计算,利用LEICA TS06全站仪后处理软件系统及CASIO fx-5800P计算器,较为精确地进行了施测,计算坐标值与设计逐桩坐标表给定值互差小于2mm。
二、非完整缓和曲线特性及参数计算在直线与圆曲线之间插入的一段半径由∞逐渐变化到R的曲线称做缓和曲线,它的形式有螺旋线(又称回旋线,我国普遍采用)、三次抛物线和双纽线。
浅谈不完整非对称性曲线在高速公路线型控制中的优化应用摘要:针对目前山区高速公路设计中出现的不完整非对称性线型的控制难点,结合现有的工程测量曲线计算理论和在工程实例中的应用,提出一种经过分析处理和优化设计改进后的方法,最终将不完整非对称性的线型计算补强后变得简单易操作,进而为施工现场提供了一种简捷易懂的计算方法。
关键词:不完整非对称性;补强;线型控制0引言在平面线型优化设计中,曲线组合类型比较多,所占线路总长的比例也是很大的。
近年来在山区高速公路曲线设计过程中,传统的曲线设计已经远远不能满足地形复杂的山区公路的选线设计要求,设置不完整非对称曲线来优化保证线路设计参数,进一步满足行车设计需要。
但这种线型的设计给现场施工的线路平面测设进度和质量的控制方面带来较大难度,本文结合现有的工程测量曲线计算理论和在工程实例中的应用,提出一种经过分析处理和优化设计后的改进方法,最终将不完整非对称性的线型计算补强后变得简单易操作。
1山区路段线型选择的技术规定为满足山区公路困难地段线型选择和设计的技术指标的均衡性与连续性,需要满足以下几点:(1)长直线尽头尽量不要接以小半径曲线,特别是在长下坡段尽头。
若由于地形所限小半径曲线难免时,中间应插入中等曲率的过渡性曲线。
使纵坡不应过大。
(2)高、低标准之间要有过渡。
而在高速公路线型设计基本要素中主要由直线、圆曲线、缓和曲线三个要素构成。
《规范》规定,基本型也可以使用非对称性的缓和曲线或者具有不完整性质的曲线特性,以适应周围的地形地物,也即是圆心位置不变而通过调整缓和曲线参数A或者截取一段距离的缓和曲线的方法来实现不完整非对称缓和曲线的设计。
对高速公路线路上不完整非对称性缓和曲线的线型控制,过去常采用的方法是用CAXIO-fx5800计算软件或计算机辅助技术将此段曲线分解为多段(至少3段)进行分别计算,且所需的计算要素繁多,输入要素不断变换。
下面通过对该线型通过一定的方法将该特点进行优化设计,并通过实例对优化设计思路进行透析,从而避免了变换曲线要素所带来的烦琐。
不完整缓和曲线坐标计算式整理修正版(鉴于网络上关于不完整缓和曲线坐标计算的错误公式繁多,特此修正)①如上图所示,以大半径R 1(R 1=r )建立切线支距坐标系则有:弧长l 处,切线角β=l r ﹢l 22×A 2坐标(X,Y )计算如下:X=l ﹣l 36×r 2 ﹣l 48×r ×A 2﹣l 540×A 4﹢l 5120×r 4﹢l 672×r 3×A 2﹢l 7112×r 2×A 4﹢l 8384×r ×A 6﹢l 93456×A 8﹢… Y= l 22×r ﹢l 36×A 2﹣l 424×r 3﹣l 520×r 2×A 2﹣l 648×r ×A 4﹣l 7336×A 6﹢l 6720×r 5﹢l 7336×r 4×A 2﹢l 8384×r 3×A 4﹢l 9864×r 2×A 6﹢l 103840×r ×A 8﹢l 1142240×A 10﹢…②以小半径R 2(R 2=r )建立切线支距坐标系:弧长l 处,切线角β=l r ﹣l 22×A 2坐标(X,Y )计算如下: X=l ﹣l 36×r 2 ﹢l 48×r ×A 2﹣l 540×A 4﹢l 5120×r 4﹣l 672×r 3×A 2﹢l 7112×r 2×A 4﹣l 8384×r ×A 6﹢l 93456×A 8﹢…Y= l 22×r ﹣l 36×A 2﹣l 424×r 3﹢l 520×r 2×A 2﹣l 648×r ×A 4﹢l 7336×A 6﹢l 6720×r 5﹣l 7336×r 4×A 2﹢ l 8384×r 3×A 4﹣l 9864×r 2×A 6﹢l 103840×r ×A 8﹣l 1142240×A 10﹢…补充:如果嫌输入程序麻烦,下面是现成的C语言代码,复制粘贴即可:/*不完整缓和曲线坐标计算(小半径到大半径)*/void Hxd(double l,double r,double A,double *p,double *q){*p=l-pow(l,3)/(6*r*r)+pow(l,4)/(8*r*A)-pow(l,5)/(40*A*A)+pow(l,5)/(120*pow(r,4))-pow(l, 6)/(72*r*r*r*A)+pow(l,7)/(112*r*r*A*A)-pow(l,8)/(384*r*A*A*A)+pow(l,9)/(3456*pow(A,4));*q=l*l/(2*r)-pow(l,3)/(6*A)-pow(l,4)/(24*r*r*r)+pow(l,5)/(20*r*r*A)-pow(l,6)/(48*r*A*A)+pow( l,7)/(336*A*A*A)+pow(l,6)/(720*pow(r,5))-pow(l,7)/(336*pow(r,4)*A)+pow(l,8)/(384*r*r*r*A*A)-pow(l,9)/(864*r*r*A*A*A)+pow(l,10)/(3840*r*pow(A,4))-pow(l,11)/(42240*pow(A,5));}/*不完整缓和曲线坐标计算(大半径到小半径)*/void Hdx(double l,double r,double A,double *p,double *q){*p=l-pow(l,3)/(6*r*r)-pow(l,4)/(8*r*A)-pow(l,5)/(40*A*A)+pow(l,5)/(120*pow(r,4))+pow(l, 6)/(72*r*r*r*A)+pow(l,7)/(112*r*r*A*A)+pow(l,8)/(384*A*A*A*r)+pow(l,9)/(3456*pow(A,4));*q=l*l/(2*r)+pow(l,3)/(6*A)-pow(l,4)/(24*r*r*r)-pow(l,5)/(20*r*r*A)-pow(l,6)/(48*r*A*A)-pow( l,7)/(336*A*A*A)+pow(l,6)/(720*pow(r,5))+pow(l,7)/(336*pow(r,4)*A)+pow(l,8)/(384*r*r*r*A*A)-pow(l,9)/(864*r*r*pow(A,3))+pow(l,10)/(3840*r*pow(A,4))+pow(l,11)/(42240*pow(A,5));}A=A*A; /*这一条一定要补上,因为上面程序段为了输入简化对A进行了降阶处理,所以要对其还原*/。