自动化课程设计任务书
- 格式:doc
- 大小:25.00 KB
- 文档页数:2

电力系统自动化课程设计任务书《电力系统自动化课程设计》使命宣言设计选题(二选一)标题一:10kV配电网开关站自动切换装置及其远程监控系统原理介绍:“备自投装置”全称为“备用电源自动投切装置”的简称,它是10kv配网中常见的自动化装置。
为提高供电可靠性,10kV配电网开关站也开始设置两条互供能力的配电线路,形成电网框架,并在线路上设置备用自动切换装置和分段开关。
一旦发生事故,备用自动切换装置能快速有效地隔离故障点。
备自投装置在故障发生时具有自动“断开”功能,保障用户用电连续性。
故障排除后,备自投装置分段开关仍保持“断开”状态,无法自动复位,需巡检人员手动复位。
若在巡检人员来开闭所之前再次出现故障,则无备用电源投入使用,用户断电。
基于上述不利因素,备用自动切换装置应配备状态监测模块。
备用自动切换装置动作时,其状态监测模块获取信息并发送至远程监控中心。
远程监控中心收到信息后,立即派巡检人员到相应的开关站进行巡检复位操作。
为了更好地分析判别故障,远端控制中心在获取备自投装置动作信息的同时,还应获得开闭所电力系统状态信息,此信息也通过状态监控模块获得。
设计要求:(1)调查研究10kV配电网开关站自动切换装置的特点和功能;绘制10kV配电网开关站自动切换装置接线图。
(2)设计备自投装置状态监控模块,确定以下功能:1、操作方式2、数据采集(自行设计若干遥信量、遥测量);3、数据通信;4、执行命令;5、其他。
(3)画出位于开闭所内的远方终端(rtu)结构框图,说明图内各模块功能。
(4)结合“执行命令”,选择数据通信规约,详细说明通信报文格式。
专题二:分励直流电机励磁控制系统仿真原理介绍:在电力系统正常运行或事故运行中,同步发电机的励磁控制系统起着重要的作用,优良的控制系统不仅可以保证发电机可靠运行,提供合格的电能,而且可以有效地提高系统的技术指标。
直流励磁机的励磁系统是一种常见的励磁方式。
它依靠与发电机组同轴的直流发电机来提供励磁电流。

PLC课程设计任务书适用:自动化电气工程及其自动化机械设计制造及其自动化等专业设计报告写作要求设计一停车场车位控制设计二病床呼叫系统设计三自动双层停车场控制设计设计四自助洗车机控制设计设计五机械手臂搬运加工流程控制设计六自动售货机的控制设计设计七十人投票机设计设计八电子计算器设计设计九电动机顺序启动/停止控制设计十三相电热器控制设计-三部电动机启动停止控制程序设计设计十二两部抽水机控制程序设计设计十三绕线转子电动机正逆转控制程序设计设计十四三相感应电动机定时正逆转设计十五附直流剃车三相感应目电动机Y-A启动控制程序设计设计十六台车呼叫控制设计十七摇臂钻床控制器设计十八液压传动组合机床控制设计十九PLC在注塑机控制中的应用设计二十PLC在MB322型联合烫剪机上的应用设计二^一自动喷泉的PLC控制设计二十二四层电梯模型的PLC控制设计二十三小车多方式运行的PLC控制设计二十四装瓶流水线的PLC控制设计二十五自动旋转检测的PLC控制设计二十六步进电机的PLC控制设计二十七交流电机的PLC控制设计二十八基于软PLC的步进电机控制设计二十九基于软PLC的交通信号灯控制设计三十基于软PLC的多种液体混合控制课程设计报告写作要求目录1引言(主要写课题设计的目的、设计内容及要实现的目标)2系统总体方案设计................................................ 贞码2.1 系统硬件配置及组成原理(要有系统组成图)2.2 系统变量定义及分配表2.3 系统接线图设计2.4 系统可靠性设计3控制系统设计3.1 控制程序流程图设计3.2 控制程序时序图设计3.3 控制程序设计思路3.4 创新设计内容4上位监控系统设计4.1 PLC 与上位监控软件通讯4.2 上位监控系统组态设计4.3 实现的效果5系统调试及结果分析5.1 系统调试及解决的问题5.2 结果分析结束语(主要写取得的效果、创新点及设计意义)参考文献附录:带功能注释的源程序设计一停车场车位控制、控制要求I. 如图7-16个车位咨入口检测器 闸柱2, 在人口处装设一传感器,用来检测车辆进入的数 3, 在出口处装设一传感器,用来检测车剩出去的数目。

《自动控制原理》课程设计任务书航空航天学院2016.11目录一、设计目的和要求 (1)1 设计目的 (1)2 设计要求 (1)二、题目 (2)题目1直线一级倒立摆频率响应控制实验 (2)题目2 直线一级倒立摆PID 控制实验 (7)题目3 控制系统校正实验1 (9)题目4 控制系统校正实验2 (10)题目5 控制系统校正实验3 (11)题目6 控制系统校正实验4 (12)三、实践报告书写内容要求 (13)四、考核方式 (14)一、设计目的和要求1 设计目的1)培养学生综合分析问题、发现问题和解决问题的能力。
2)培养学生运用所学知识,利用MATLAB这软件解决控制理论中的复杂和工程实际问题。
3)提高学生课程设计报告撰写水平。
4)培养学生文献检索的能力。
2 设计要求1)熟悉MATLAB语言及Simulink仿真软件。
2)掌握控制系统的时域分析,主要包括系统的各种响应、性能指标的获取、零极点对系统性能的影响、高阶系统的近似研究,控制系统的稳定性分析,控制系统的稳态误差的求取。
3)掌握控制系统的根轨迹分析,主要包括多回路系统的根轨迹、零度根轨迹、纯迟延系统根轨迹和控制系统的根轨迹分析。
4)掌握控制系统的频域分析,主要包括系统Bode图、Nyquist图、稳定性判据和系统的频域响应。
5)掌握控制系统的校正,主要包括根轨迹法超前校正、频域法超前校正、频域法滞后校正以及校正前后的性能分析。
二、题目题目1直线一级倒立摆频率响应控制实验1、初始条件(1)固高GLIP2002直线二级倒立摆(2)计算机(Matlab Simulink)1.1 倒立摆系统简介倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。
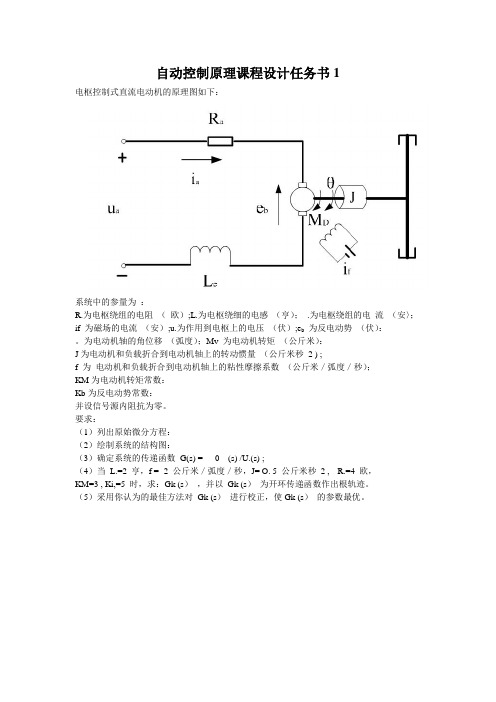
自动控制原理课程设计任务书1电枢控制式直流电动机的原理图如下:系统中的参量为:R.为电枢绕组的电阻(欧);L.为电枢绕细的电感(亨);.为电枢绕组的电流(安〉;if 为磁场的电流(安);u.为作用到电枢上的电压(伏);e b为反电动势(伏):。
为电动机轴的角位移(弧度);Mv 为电动机转矩(公斤米):J为电动机和负载折合到电动机轴上的转动惯量(公斤米秒2 ) ;f 为电动机和负载折合到电动机轴上的粘性摩擦系数(公斤米/弧度/秒);KM为电动机转矩常数:Kb为反电动势常数:并设信号源内阻抗为零。
要求:(1)列出原始微分方程:(2)绘制系统的结构图:(3)确定系统的传递函数G(s) = 0 (s) /U.(s) ;(4)当L.=2 亨,f = -2 公斤米/弧度/秒,J= O. 5 公斤米秒2 , R.=4 欧,KM=3 , Ki,=5 时,求:Gk (s),并以Gk (s)为开环传递函数作出根轨迹。
(5)采用你认为的最佳方法对Gk (s)进行校正,使Gk (s)的参数最优。
自动控制原理课程设计任务书2打印机打印头控制系统如图所示,采用皮带传动、直流电机驱动,其中传送皮带弹性系数k=20N/m,打印头质量为m=0. 2kg,光电位移传感器的灵敏度lv/m,皮带轮的半径都为0. 15m,电机忽略电感,电阻R=2 欧,扭矩常数为:km=2Nm/A, 系统转动惯量为J=0.0kg. m2,系统的阻尼折合到电机处b=0. 25Nms/rad 。
要求:(1) 分析系统性能,如果采用速度副反馈进行校正,反馈系数为0. 1,再计算系统性能。
( 2 ) 要求系统调节时间为0. ls,超调量小于10%,稳态误差小于1%,试用频率法进行校正。
( 3) 如果采用PI校正,试用根轨迹法确定系数。
自动控制原理课程设计任务书3已知一光源自动跟踪系统,利用帆板上一对光敏元件检测光能,当帆板偏离光源时,光敏元件产生电压差并通过放大后驱动电机转动,使太阳能帆板对准光源,如图示,其中,电机Ra=l.75;La=2.83e-3;Vc=Kv*Wa,表示转子旋转产生的电动势,Kv=0.093 ;电机产生的电磁力矩T=Kt*I,Kt=0.0924;电机及负载的转动惯量J=30e-6m s;阻力矩为T = B*wa,其中B=5e-3。

plc课程设计任务书一、课程目标知识目标:1. 让学生理解PLC(可编程逻辑控制器)的基本原理,掌握其工作流程和编程方法。
2. 使学生掌握PLC的常用指令,并能运用这些指令完成简单的控制程序编写。
3. 帮助学生了解PLC在工业自动化中的应用,提高对实际工程问题的解决能力。
技能目标:1. 培养学生运用PLC软件进行程序设计和调试的能力。
2. 培养学生通过团队协作,分析问题、解决问题的能力。
3. 提高学生动手实践能力,学会使用PLC控制硬件设备。
情感态度价值观目标:1. 培养学生对PLC技术的兴趣,激发学习热情,树立正确的学习态度。
2. 培养学生具备创新意识和实践精神,敢于面对挑战,勇于克服困难。
3. 通过课程学习,使学生认识到PLC技术在工业发展中的重要性,增强国家使命感和社会责任感。
课程性质:本课程为实践性较强的学科,注重理论联系实际,强调学生的动手能力和创新能力。
学生特点:学生具备一定的电子基础和编程能力,对新鲜事物充满好奇,但可能缺乏实践经验。
教学要求:结合学生特点,以实际应用为导向,注重启发式教学,鼓励学生参与实践,培养其独立思考和解决问题的能力。
将课程目标分解为具体的学习成果,以便在教学过程中进行有效评估。
二、教学内容1. PLC基本原理及结构:包括PLC的定义、发展历程、主要组成部分及其功能。
教材章节:第一章 可编程逻辑控制器概述2. PLC工作原理及编程方法:讲解PLC的工作流程、编程语言和编程规则。
教材章节:第二章 PLC工作原理与编程基础3. PLC常用指令及其应用:介绍PLC的常用指令,如逻辑运算、定时器、计数器等,并结合实例进行分析。
教材章节:第三章 PLC指令系统及编程实例4. PLC控制系统设计:讲解PLC控制系统的设计步骤、硬件选型和软件编程。
教材章节:第四章 PLC控制系统设计5. PLC在工业自动化中的应用:介绍PLC在各个领域的应用案例,分析其优缺点。
教材章节:第五章 PLC在工业自动化中的应用6. PLC实践操作:组织学生进行PLC编程软件的使用、程序设计、调试及硬件控制等实践活动。
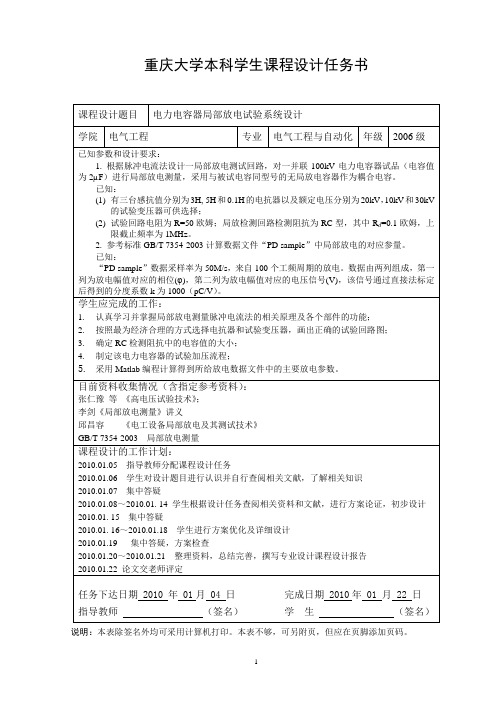
电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
电气工程学院教务科电气工程学院《课程设计》任务书课程名称:电气控制与PLC课程设计基层教学单位:电气工程及自动化系指导教师:郭忠南等说明:1、此表一式三份,系、学生各一份,报送院教务科一份。
2、学生那份任务书要求装订到课程设计报告前面。
自动化控制课程设计任务书
一、课程教学目的
1、培养理论联系实际的设计思想,训练综合运用经典控制理论和相关课程知识的能力。
2、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
3、学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。
4、学会使用硬件仿真软件对系统进行模拟仿真。
5、锻炼独立思考和动手解决控制系统实际问题的能力。
二、课程设计内容及基本要求
1、课程设计内容
(1)、给出有实际背景的数学模型,分别提出不同的设计题目及设计指标要求。
学生通过查阅相关资料,根据各自题目确定合理的控制方式及校正形式,完成设计。
(2)、学生首先要根据所学自动控制原理课程知识(时域分析法、频率法和根轨迹法)对系统进行性能分析。
根据设计题目要求进行人工设计校正装置,初步设计出校正装置传递函数形式及参数。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(4)、确定校正装置的电路形式及电路参数。
(5)、完成设计报告。
2、设计基本要求
(1)、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析。
(2)、根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应
)
12.0)(11.0()(++=s s s K s G 图。
(4)、确定校正装置的电路形式及电路参数。
(5)、使用multsim 电路设计仿真软件绘画模拟电路。
分析采用的校正装置的效果。
三、所选设计题
系统的开环传递函数为: ,设计一个PID 校正环节,要求系统为: (1)绘画开闭环零极点图;
(2)画出未校正系统的根轨迹图,分析闭环系统是否稳定;
(3)作出单位阶跃响应,并分析性能指标;
(4)画出未校正系统的Bode 图,分析系统是否稳定;
(5)设计系统的串联校正装置,使系统达到下列指标;
①系统响应斜坡信号r(t)=t 时,稳态误差小于等于0.01;
②系统的相角裕度40γ≥︒;
(6)给出校正装置的传递函数;
(7)画出校正前后的模拟电路。
完成期限 2014.05.12至2014.05.18
指导教师 时国平 孙佐
实验室主任 桂传友
2014年 2 月 20 日。