3 GPS卫星位置的计算
- 格式:ppt
- 大小:1.17 MB
- 文档页数:18
GPS卫星位置计算
GPS(全球定位系统)卫星位置计算是指利用GPS系统中的卫星信号
来确定地球上其中一点的精确位置。
GPS系统是由一组运行在地球轨道上
的卫星组成,通过接收到这些卫星发出的信号,可以进行三角测量,从而
计算出接收器的准确位置。
在GPS卫星位置计算中,主要涉及的概念有卫
星轨道、卫星位置估计、测量范围等。
卫星位置估计是指通过接收到多颗卫星发出的信号,利用三角测量原
理来估计卫星的准确位置。
当接收器接收到至少4颗卫星的信号时,可以
根据卫星的位置信息以及接收信号的时间差来计算出接收器的准确位置。
其中,接收信号的时间差可以通过卫星信号中的时间戳来获得,而卫星位
置信息则是通过卫星的广播信号来传输的。
测量范围是指卫星信号的有效接收范围,理论上,在开阔的空地上,
能够接收到卫星信号的范围应该是全球范围。
然而,在一些特殊的环境中,如高楼大厦、山谷、密林等地形复杂的地方,接收器可能受到归一化干扰,导致无法正常接收到卫星信号。
为了解决这个问题,可以通过建立更多的
基站或使用增强型GPS接收器等手段来提高信号接收的可靠性和精确性。
总结起来,GPS卫星位置计算通过接收到卫星发出的信号,利用三角
测量原理来计算接收器的准确位置。
这个过程涉及到卫星轨道、卫星位置
估计、测量范围等概念,通过合理的部署卫星、精确的计算方法和有效的
信号接收手段,可以实现全球范围内的地理定位服务。
卫星定位公式
卫星定位公式是用于计算接收器所接收到的卫星信号的时间和位置的公式。
在全球定位系统(GPS)中,卫星定位公式基于以下三个主要部分:
1. 卫星发射时间
2. 卫星信号传播时间
3. 接收器时间
卫星定位公式可以表示为:
T = T0 + ΔT + ΔT'
其中:
-T 是接收器显示的时间;
-T0 是卫星发射的时间;
-ΔT 是卫星信号传播时间;
-ΔT' 是接收器时间误差。
卫星信号传播时间ΔT可以通过以下公式计算:
ΔT = sqrt((c * T0) / (4 * π* d))
其中:
- c 是光速,约为3 ×10^8 米/秒;
-T0 是卫星发射的时间;
- d 是卫星与接收器之间的距离。
接收器时间误差ΔT'主要取决于接收器的精度以及其他外部因素。
此外,为了计算接收器的位置,还需要另一个方程。
通常使用伪距测量法,伪距测量方程为:
ρ= sqrt((c * ΔT)^2 + b^2)
其中:
-ρ是伪距;
- c 是光速;
-ΔT 是卫星信号传播时间;
- b 是卫星轨道误差。
结合这两个方程,可以解出接收器的时间和位置。
实际上,GPS系统使用四个以上卫星的信号,因此可以利用多个方程来求解接收器的位置,从而提高定位精度。
这种方法称为解算四元组。
卫星导航定位常用参数和常用公式1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数C=-484.16685×10-6;2,0第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。

GPS卫星坐标计算GPS(全球定位系统)是一种通过地球上的卫星提供位置和时间信息的导航系统。
GPS卫星坐标计算是指根据接收到的卫星信号来确定观测站位于球面上的位置。
GPS系统是由一组位于中轨道上的卫星组成,它们每天绕地球运行两次,以提供全球的覆盖范围。
每个卫星都携带有高精度的原子钟,用来产生精确的时间信号。
GPS接收机位于地面上,它接收到来自多颗卫星的信号,并测量信号的到达时间和卫星位置。
经过计算,接收机可以确定自身的空间坐标。
计算GPS卫星坐标的过程可以分为以下几个步骤:1.接收卫星信号:GPS接收机通过天线接收到来自多颗卫星的信号。
2.测量信号到达时间:接收机测量每个信号的到达时间,这需要精确的时钟。
由于GPS接收机一般没有原子钟那样的高精度时钟,所以需要利用接收到的卫星信号来校准本地时钟。
3.计算卫星位置:GPS接收机需要知道每颗卫星在接收时间点的准确位置。
每颗卫星通过广播自身的位置和时间信息,接收机可以根据接收到的信号来计算卫星的位置。
4.求解距离:接收机通过测量信号到达时间和卫星位置计算出距离。
由于信号的传播速度是已知的大约是光速,我们可以根据距离和到达时间计算出信号的传播时间。
5.根据接收到的信号来计算自身的位置。
接收机通过多个卫星信号的距离来确定自身的位置,这涉及到多种解算方法,例如最小二乘估计等。
接收机需要至少接收到四颗卫星的信号来解算自身的位置。
这些步骤涉及到大量的数学和物理计算,例如测量时间、测量距离、计算坐标等。
为了提高计算的精度,还需要考虑一些因素,例如信号传播时的大气延迟等。
总的来说,GPS卫星坐标计算是一项复杂而精确的工程,涉及到多个步骤和数学模型。
随着技术的不断进步,GPS定位的精度和可靠性也在不断提高,为导航、地球科学等领域的应用提供了重要的支持。
第三章GPS 卫星的坐标计算在用GPS 信号进行导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电文所提供的轨道参数按一定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作用在卫星上力卫星受的作用力主要有:地球对卫星的引力,太阳、月亮对卫星的引力,大气阻力,大气光压,地球潮汐力等。
中心力:假设地球为匀质球体的引力(质量集中于球体的中心),即地球的中心引力,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为无摄运动,卫星的轨道称为无摄轨道。
摄动力:也称非中心力,包括地球非球形对称的作用力、日月引力、大气阻力、大气光压、地球潮汐力等。
摄动力使卫星运动产生一些小的附加变化而偏离理想轨道,同时这种偏离量的大小随时间而改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作用在卫星上的力很多,但这些力的大小却相差很悬殊。
如果将地球引力当作1的话,其它作用力均小于10-5。
2.二体问题研究两个质点在万有引力作用下的运动规律问题称为二体问题。
3.卫星轨道和卫星轨道参数卫星在空间运行的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
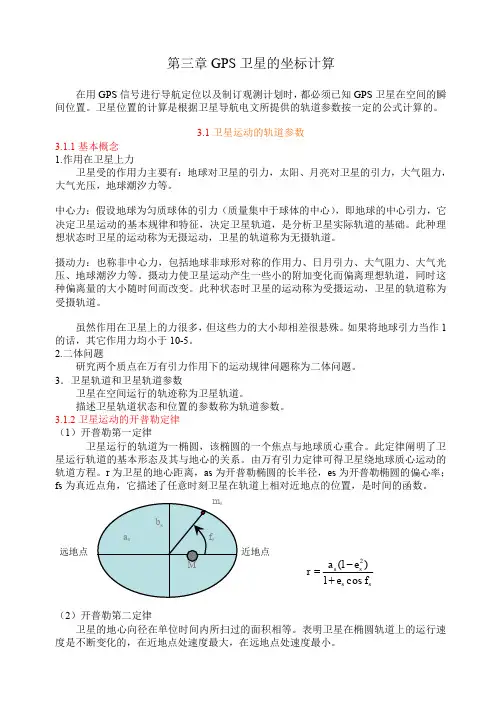
3.1.2卫星运动的开普勒定律 (1)开普勒第一定律卫星运行的轨道为一椭圆,该椭圆的一个焦点与地球质心重合。
此定律阐明了卫星运行轨道的基本形态及其与地心的关系。
由万有引力定律可得卫星绕地球质心运动的轨道方程。
r 为卫星的地心距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏心率;fs 为真近点角,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第二定律卫星的地心向径在单位时间内所扫过的面积相等。
表明卫星在椭圆轨道上的运行速度是不断变化的,在近地点处速度最大,在远地点处速度最小。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运行周期的平方与轨道椭圆长半径的立方之比为一常量,等于GM 的倒数。
GPS导航定位原理以及定位解算算法GPS(全球定位系统)是一种基于卫星信号的导航系统,用于确定地球上任意点的位置和时间。
GPS导航定位的原理基于三个基本原则:距离测量、导航电文和定位解算。
首先,定位解算的基本原理是通过测量卫星与接收器之间的距离差异来确定接收器的位置。
GPS接收器接收卫星发射的信号,并测量信号从卫星到接收器的时间延迟。
通过已知卫星位置和测量时间延迟,可以计算出接收器与卫星之间的距离。
至少需要接收到4个卫星信号才能进行定位解算,因为每个卫星提供三个未知数(x、y、z三个坐标)和一个时间未知数。
其次,GPS导航系统通过导航电文提供的卫星轨道参数来计算卫星的精确位置。
每个卫星通过导航电文向接收器传递关于卫星识别码、卫星轨道和钟差等数据。
接收器使用这些参数来计算卫星的准确位置。
最后,通过定位解算算法,将接收器收到的卫星信号和导航电文中的轨道参数进行计算,可以确定接收器的位置。
定位解算算法主要有两种:三角测量法和最小二乘法。
三角测量法基于三角学原理,通过测量多个卫星与接收器之间的距离差异,然后根据这些距离差异以及卫星的位置信息来计算接收器的位置。
这种算法的优势是计算简单,但受到测量误差的影响较大。
最小二乘法是一种数学优化方法,通过最小化接收器位置与测量距离之间的误差平方和来求解接收器的位置。
该方法考虑到了测量误差的影响,并通过对多个卫星信号进行加权以提高解算的准确性。
除了上述的定位解算算法,GPS导航系统还使用了差分GPS和惯性导航等技术来提高定位精度和可靠性。
差分GPS通过接收器与参考站之间的信号比对,消除了大部分的误差,提高了定位精度。
惯性导航通过测量加速度和角速度来估计接收器的位移,可以在信号丢失或弱化的情况下提供连续的导航定位。
综上所述,GPS导航定位通过距离测量、导航电文和定位解算算法来确定接收器的位置。
通过接收到的卫星信号和导航电文中的轨道参数,定位解算算法能够计算出接收器的位置,并提供准确的导航信息。
GPS卫星定位坐标计算及程序设计GPS卫星定位是一种利用全球定位系统(GPS)卫星接收并处理信息来确定位置的技术。
它使用三个或更多GPS卫星的信号来计算接收器的位置。
GPS卫星发送包括时间和位置信息的无线电信号,接收器接收这些信号并通过计算信号的传播时间,确定接收器所在的位置。
GPS坐标系统使用经度和纬度来表示地理位置。
经度是指地球上其中一点距离本初子午线(格林尼治子午线)的角度,取值范围为0-180度,东经为正,西经为负。
纬度是指地球上其中一点距离赤道的角度,取值范围为0-90度,北纬为正,南纬为负。
通过计算GPS卫星的信号传播时间,我们可以确定接收器所在位置的经度和纬度,并将其表示为GPS坐标。
要进行GPS卫星定位坐标计算,可以按照以下步骤进行:1.获取GPS卫星信号:使用GPS接收器接收GPS卫星发送的信号。
每个GPS接收器一般都能接收多达24颗卫星的信号。
2.计算信号传播时间:通过记录信号发送和接收的时间差,可以计算出信号从卫星到达接收器的传播时间。
由于信号的传播速度是已知的(约为300,000公里/秒),可以根据传播时间计算出信号传播的距离。
3.确定卫星位置:由于我们知道每个GPS卫星的位置信息,可以根据信号传播距离计算出接收器和每个卫星之间的距离差。
通过多个卫星的距离差,可以确定接收器所在的位置。
4.计算经度和纬度:使用三角函数和数学模型,通过接收器和卫星之间的距离差,可以计算出接收器的经度和纬度。
5.显示位置信息:将计算得到的经度和纬度转换为可读的格式,并显示在GPS接收器或其他设备上。
1.数据传输:首先需要确保GPS接收器能够接收和传输卫星信号的数据。
可以使用串行通信接口(如RS-232)或USB接口,将接收器与计算机或其他设备连接起来。
2.数据接收和处理:编写程序来读取接收器传输的信号数据,包括卫星信号的传播时间、卫星位置信息等。
根据所选的编程语言和平台,可以使用相应的库和函数来实现数据读取和处理的功能。
GPS卫星位置的计算利用C++编写了一段能计算单一瞬时卫星坐标的程序,在运行程序之前,需做部分准备工作:(1)在F盘下建立一名为“单一卫星广播星历”的txt文件。
(2)从“广播星历.txt”文件中拷贝从卫星PRN号开始的8行数据到“单一卫星广播星历.txt”中(3)在编辑选项中,将全部的“D”替换为“E”。
下面为我所选取的一个广播星历:18 06 8 25 6 0 0.0-2.472363412380E-04-1.023*********E-12 0.000000000000E+001.410000000000E+02-1.721875000000E+01 4.502687555010E-09 1.413760604187E+00-7.990747690201E-07 7.598234573379E-03 1.118145883083E-05 5.153709835052E+034.536000000000E+05-1.303851604462E-08-1.095067942661E-01 1.527369022369E-079.571235745530E-01 1.640000000000E+02-2.656176299285E+00-8.0374********E-09-5.193073455211E-10 1.000000000000E+00 1.389000000000E+03 0.000000000000E+002.000000000000E+00 0.000000000000E+00-1.024*********E-08 1.410000000000E+024.464490000000E+05 4.000000000000E+00程序设计部分:#include<stdio.h>#include<math.h>int main(){int i = 0;double n[50], n0, nn, t, tk, Mk, Ek, Vk, Yk, Gu, Gr, Gi, uk, rk, ik, xk, yk, zk, X, Y, Z, Lk, UT, yy, mm, JD, gpsz;FILE *fp;fp = fopen("F:\\单一卫星广播星历.txt", "r");if (fp == NULL){printf ("文件打开失败!\n");return 0;}while (! feof (fp)){fscanf(fp, "%lf", &n[i]);i++;}n0 = (sqrt(3986005E+8))/pow(n[17], 3);nn = n0 + n[12];/*计算卫星运行的平均角速度*/UT = n[4] + (n[5] / 60) + (n[7] / 3600);/*民用日的时分秒化为实数时*/if (n[1] >= 80)/*广播星历中年只有后两位,化为4位,参考1980年1月6日0点*/ {if (n[1] == 80 && n[2] == 1 && n[3] < 6){n[1] = n[1] + 2000;}n[1] = n[1] + 1900;}else{n[1] = n[1] + 2000;}if (n[2] <= 2){yy = n[1] - 1;mm = n[2] + 12;}if (n[2] > 2){yy = n[1];mm = n[2];}JD = (int)(365.25 * yy) + (int)(30.6001 * (mm + 1)) + n[3] + (UT / 24) + 1720981.5;/*化为儒略日*/gpsz = (int)((JD - 2444244.5) / 7);/*计算GPS周*/t = (JD - 2444244.5 - 7 * gpsz) * 24 * 3600;/*得出GPS秒*/tk = t - n[18];/*tk1为中间值,用以判断tk与正负302400的关系,然后返回到tk上*/ while (tk > 302400 || tk < -302400){if (tk > 302400){tk = tk - 604800;}else{tk = tk + 604800;}}/*计算归化观测时间*/Mk = n[13] + nn * tk;/*观测时刻的卫星平近点角*/Ek = Mk;Ek = Mk + n[15] * sin(Ek);Ek = Mk + n[15] * sin(Ek);/*迭代两次计算观测时刻的偏近点角*/Vk = atan(sqrt(1 - n[15] * n[15]) * sin(Ek)) / (cos(Ek) - n[15]);/*真近点角*/Yk = Vk + n[24];/*升交距角*/Gu = n[14] * cos(2 * Yk) + n[16] * sin(2 * Yk);Gr = n[23] * cos(2 * Yk) + n[11] * sin(2 * Yk);Gi = n[19] * cos(2 * Yk) + n[21] * sin(2 * Yk);/*摄动改正项*/uk = Yk + Gu;rk = n[17] * n[17] * (1 - n[15] * cos(Ek)) + Gr;ik = n[22] + Gi + n[26] * tk;/*经摄动改正后的升交距角、卫星矢径、轨道倾角*/xk = rk * cos(uk);yk = rk * sin(uk);zk = 0;/*卫星在轨道坐标系的坐标*/Lk = n[20] + (n[25] - 7.29211515E-5) * tk - 7.29211515E-5 * n[18];/*观测时刻t的升交点经度*/X = xk * cos(Lk) - yk * cos(ik) * sin(Lk);Y = xk * sin(Lk) + yk * cos(ik) * cos(Lk);Z = yk * sin(ik);/*卫星在WGS-84坐标系的坐标*/printf("该卫星在WGS-84坐标系中的坐标为:\nX = %lf m\nY = %lf m\nZ = %lf m\n", X, Y, Z);fclose(fp);return 0;}计算结果:该卫星在WGS-84坐标系中的坐标为:X = 9223153.692525 mY = 24133486.931401 mZ = 6032585.919385 m。
G P S导航定位原理以及定位解算算法TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1 地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ 构成右手坐标系(即指向东经90度方向)。
gps原理公式全球定位系统(GPS)原理是基于三角测量的方法来确定地球上某个位置的经度、纬度和海拔高度。
其工作原理如下:1. 卫星发射信号:GPS系统由一组地球轨道上的卫星组成,它们向地面发射无线电信号。
这些信号包括卫星的精确时钟信息以及卫星的编号。
2. 接收机接收信号:GPS接收机用天线接收到卫星发射的信号。
接收机将信号转换为电信号,并进行放大和处理。
3. 三角测量测距:接收机同时接收到多颗卫星发射的信号后,根据信号的传播时间差来计算距离。
这是通过衡量信号接收时间和发射时间之间的差异来实现的。
传播时间差越大,距离越远。
4. 数据处理:接收机将接收到的信号和测距数据传输给计算机进行处理。
计算机分析信号传播时间差以及卫星位置信息,使用三角定位算法来计算接收机所在位置的经度、纬度和海拔高度。
5. 定位结果显示:计算机计算出接收机所在位置后,将结果显示在GPS设备的屏幕上,用户可以通过地图或其他导航功能来了解自己的位置和导航方向。
GPS定位公式:根据三角定位算法,可以使用以下公式计算接收机的位置:(x,y,z): 接收机所在位置的直角坐标(t1,t2,t3): 接收到信号的时间差(x1,y1,z1): 第一个卫星的位置坐标(x2,y2,z2): 第二个卫星的位置坐标(x3,y3,z3): 第三个卫星的位置坐标通过上述数据,可以使用以下公式计算接收机的经度和纬度:x = [(t1 - t2) * c * x3 - (t1 - t3) * c * x2] / [2*(x1-x2)*(t1-t3) +2*(x1-x3)*(t1-t2)]y = [(t1 - t2) * c * y3 - (t1 - t3) * c * y2] / [2*(y1-y2)*(t1-t3) +2*(y1-y3)*(t1-t2)]z = [(t1 - t2) * c * z3 - (t1 - t3) * c * z2] / [2*(z1-z2)*(t1-t3) +2*(z1-z3)*(t1-t2)]其中,c为光速。
GPS卫星坐标计算
GPS系统由全球定位系统(GPS)组成,包括24颗运行在近地轨道上的
人造卫星,地面控制台和GPS接收器。
这些卫星以精确的轨道方式固定的
环绕着地球,它们通过无线电波将时间和位置信息传输到地面的GPS接收器。
具体步骤如下:
1.接收卫星信号:GPS接收器会接收到至少4颗卫星发出的信号。
这
些信号包括卫星的位置信息、时间戳和卫星信号的延迟。
2.计算信号传播时间差:接收器通过比较接收到的卫星信号和接收器
内部的原子钟产生的时间信号之间的差异,计算出信号传播的时间差。
3.确定接收器与卫星的距离:通过信号传播时间差和光速
(299,792,458米/秒),可以计算出接收器与卫星之间的距离。
公式为:距离=时间差x光速。
4.计算接收器的位置:通过接收到的至少4个卫星的距离信息,可以
计算出接收器相对于卫星的位置。
每个卫星会提供一个球面坐标,通过这
些球面坐标的交点,可以确定接收器的位置。
5.校准接收器的时间:接收器内部的原子钟会有一定的误差,因此需
要通过接收到的卫星信号的时间戳来校准接收器的时间。
6.确定地球的形状和尺寸:GPS系统还会考虑地球的形状和尺寸,以
便更精确地确定接收器的位置。
通过考虑地球的椭球形状、重力场和大气
层对卫星信号的影响,可以提高GPS定位的精确度。
总结起来,GPS卫星坐标计算的过程涉及接收卫星信号、计算信号传播时间差、确定接收器与卫星的距离、计算接收器的位置、校准接收器的时间以及考虑地球的形状和尺寸等步骤。
通过这些计算,可以精确测量地球上其中一点的位置坐标。
卫星导航定位算法与程序设计_常用参数和公式讲解卫星导航定位算法是通过接收多颗卫星发出的信号来确定接收器的位置的算法。
常用的卫星导航系统有美国的全球定位系统(GPS)、俄罗斯的格洛纳斯系统和欧洲的伽利略系统等。
下面将讲解卫星导航定位算法中的常用参数和公式。
1.GPS系统参数GPS系统中的常用参数包括信号传播速度、卫星时钟频率、卫星位置、接收机时钟误差等。
信号传播速度是指电磁波在真空中传播的速度,约为3×10^8米/秒。
卫星时钟频率是指卫星发射信号的频率,它与卫星位置和传播速度有关。
卫星位置是指卫星在天空中的位置坐标,它是通过星历数据确定的。
接收机时钟误差是指接收器时钟与它所处的卫星系统时钟之间的差异。
2.GPS接收机参数GPS接收机中的常用参数包括接收机观测量、接收机时钟和接收机位置等。
接收机观测量是指接收机接收到的卫星信号的信息,包括卫星信号的到达时间、信号强度等。
接收机时钟是指接收机内部的时钟,它用于测量到达时间和计算位置信息。
接收机位置是指接收机的地理位置坐标,它是待求解的定位参数,通过卫星信号的到达时间和卫星位置计算得出。
3.定位算法卫星导航定位算法主要包括距离测量和位置计算两个步骤。
距离测量是通过测量接收机与卫星之间的距离,从而确定接收机与卫星的空间几何关系。
常用的距离测量方法有伪距测量和载波相位测量两种。
伪距测量是通过测量卫星信号的传播时间来计算距离,利用的是卫星信号中的导航消息和接收机观测量。
载波相位测量是通过测量卫星信号的相位差来计算距离,具有更高的精度,但需要更复杂的算法和硬件支持。
位置计算是根据距离测量结果和卫星位置信息,利用三角测量原理来计算接收机的位置。
常用的位置计算方法有单点定位和差分定位两种。
单点定位是通过接收机与至少四颗卫星之间的距离测量结果,利用三边测量原理计算接收机的位置。
差分定位是在单点定位的基础上,利用额外的参考站测量数据对接收机的位置进行修正,提高定位精度。
GPS卫星轨道的理论和计算1.引言GPS全球定位系统是一种利用卫星定位技术实现精确定位和时间同步的全球导航卫星系统,由美国的军方开发,目前已经向全世界开放。
其中,GPS卫星是实现GPS定位的核心部分,而卫星的轨道是卫星运动的基础,也是GPS定位的重要参考基准。
2. GPS卫星轨道的理论GPS卫星运动的物理过程与地球引力和旋转的运动规律密切相关。
GPS卫星的轨道通常是圆形或近似圆形的,但在现实世界中,卫星的轨道呈现为稍微不规则的椭圆形。
GPS卫星成功运行的关键在于,卫星轨道的参数设定和运行稳定性的维持,这些问题都需要靠严密的理论计算处理。
2.1 GPS卫星轨道的类型GPS卫星轨道主要分为两类:中心天球和地球中心。
中心天球轨道不考虑地球的自转和引力等因素,只以恒星为参照物,将GPS卫星的轨道作为一个运行的天体,根据行星运动学的定义和理论计算出卫星的运行轨迹。
而地球中心轨道则更加复杂,它不仅需要考虑恒星引力,还要包括地球引力、地球自转引起的离心效应等因素,这些因素对于卫星的轨迹有着较大的影响。
2.2 GPS卫星轨道计算方法GPS卫星轨道的计算方法比较复杂,需要使用天文学和航空航天学等多个领域的相关知识。
目前,根据GPS卫星运行的特点,卫星轨道的计算主要分为以下两种方法。
2.2.1 斯塔克-德鲁瑟方法斯塔克-德鲁瑟方法也称为SDP4算法,它是一种常用的GPS卫星轨道计算方法。
该方法通过外推算法预测卫星位置,并在每个预报周期内根据实际观测数据进行校正。
SDP4方法的优点是速度快,精度较高,但在某些情况下可能会出现误差。
2.2.2 数值积分方法数值积分方法是一种更加精确的GPS卫星轨道计算方法,它可以模拟卫星运动在地球引力和自转等因素的影响下的完整轨迹。
该方法的优点在于精确度很高,但计算量较大,需要进行多次迭代计算。
3. GPS卫星轨道计算案例以GPS卫星PRN25为例,我们来看看如何进行轨道计算。
3.1 基本信息卫星编号:PRN25发射时间:1987年6月10日升轨期:20分钟轨道高度:20200公里3.2 计算过程我们可以通过卫星计算软件,填入卫星的基本信息,以及需要预测的时间和卫星位置,进行轨道计算。
GPS卫星位置的计算利用C++编写了一段能计算单一瞬时卫星坐标的程序,在运行程序之前,需做部分准备工作:(1)在F盘下建立一名为“单一卫星广播星历”的txt文件。
(2)从“广播星历.txt”文件中拷贝从卫星PRN号开始的8行数据到“单一卫星广播星历.txt”中(3)在编辑选项中,将全部的“D”替换为“E”。
下面为我所选取的一个广播星历:18 06 8 25 6 0 0.0-2.472363412380E-04-1.023*********E-12 0.000000000000E+001.410000000000E+02-1.721875000000E+01 4.502687555010E-09 1.413760604187E+00-7.990747690201E-07 7.598234573379E-03 1.118145883083E-05 5.153709835052E+034.536000000000E+05-1.303851604462E-08-1.095067942661E-01 1.527369022369E-079.571235745530E-01 1.640000000000E+02-2.656176299285E+00-8.0374********E-09-5.193073455211E-10 1.000000000000E+00 1.389000000000E+03 0.000000000000E+002.000000000000E+00 0.000000000000E+00-1.024*********E-08 1.410000000000E+024.464490000000E+05 4.000000000000E+00程序设计部分:#include<stdio.h>#include<math.h>int main(){int i = 0;double n[50], n0, nn, t, tk, Mk, Ek, Vk, Yk, Gu, Gr, Gi, uk, rk, ik, xk, yk, zk, X, Y, Z, Lk, UT, yy, mm, JD, gpsz;FILE *fp;fp = fopen("F:\\单一卫星广播星历.txt", "r");if (fp == NULL){printf ("文件打开失败!\n");return 0;}while (! feof (fp)){fscanf(fp, "%lf", &n[i]);i++;}n0 = (sqrt(3986005E+8))/pow(n[17], 3);nn = n0 + n[12];/*计算卫星运行的平均角速度*/UT = n[4] + (n[5] / 60) + (n[7] / 3600);/*民用日的时分秒化为实数时*/if (n[1] >= 80)/*广播星历中年只有后两位,化为4位,参考1980年1月6日0点*/ {if (n[1] == 80 && n[2] == 1 && n[3] < 6){n[1] = n[1] + 2000;}n[1] = n[1] + 1900;}else{n[1] = n[1] + 2000;}if (n[2] <= 2){yy = n[1] - 1;mm = n[2] + 12;}if (n[2] > 2){yy = n[1];mm = n[2];}JD = (int)(365.25 * yy) + (int)(30.6001 * (mm + 1)) + n[3] + (UT / 24) + 1720981.5;/*化为儒略日*/gpsz = (int)((JD - 2444244.5) / 7);/*计算GPS周*/t = (JD - 2444244.5 - 7 * gpsz) * 24 * 3600;/*得出GPS秒*/tk = t - n[18];/*tk1为中间值,用以判断tk与正负302400的关系,然后返回到tk上*/ while (tk > 302400 || tk < -302400){if (tk > 302400){tk = tk - 604800;}else{tk = tk + 604800;}}/*计算归化观测时间*/Mk = n[13] + nn * tk;/*观测时刻的卫星平近点角*/Ek = Mk;Ek = Mk + n[15] * sin(Ek);Ek = Mk + n[15] * sin(Ek);/*迭代两次计算观测时刻的偏近点角*/Vk = atan(sqrt(1 - n[15] * n[15]) * sin(Ek)) / (cos(Ek) - n[15]);/*真近点角*/Yk = Vk + n[24];/*升交距角*/Gu = n[14] * cos(2 * Yk) + n[16] * sin(2 * Yk);Gr = n[23] * cos(2 * Yk) + n[11] * sin(2 * Yk);Gi = n[19] * cos(2 * Yk) + n[21] * sin(2 * Yk);/*摄动改正项*/uk = Yk + Gu;rk = n[17] * n[17] * (1 - n[15] * cos(Ek)) + Gr;ik = n[22] + Gi + n[26] * tk;/*经摄动改正后的升交距角、卫星矢径、轨道倾角*/xk = rk * cos(uk);yk = rk * sin(uk);zk = 0;/*卫星在轨道坐标系的坐标*/Lk = n[20] + (n[25] - 7.29211515E-5) * tk - 7.29211515E-5 * n[18];/*观测时刻t的升交点经度*/X = xk * cos(Lk) - yk * cos(ik) * sin(Lk);Y = xk * sin(Lk) + yk * cos(ik) * cos(Lk);Z = yk * sin(ik);/*卫星在WGS-84坐标系的坐标*/printf("该卫星在WGS-84坐标系中的坐标为:\nX = %lf m\nY = %lf m\nZ = %lf m\n", X, Y, Z);fclose(fp);return 0;}计算结果:该卫星在WGS-84坐标系中的坐标为:X = 9223153.692525 mY = 24133486.931401 mZ = 6032585.919385 m。
GPS定位原理和简单公式全球定位系统(Global Positioning System)是美国第二代卫星导航系统。
是在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。
和子午仪系统一样,全球定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
按目前的方案,全球定位系统的空间部分使用24颗高度约2.02万千米的卫星组成卫星星座。
21+3颗卫星均为近圆形轨道,运行周期约为11小时58分,分布在六个轨道面上(每轨道面四颗),轨道倾角为55度。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形(DOP)。
这就提供了在时间上连续的全球导航能力。
地面监控部分包括四个监控站、一个上行注入站和一个主控站。
监控站设有GPS用户接收机、原子钟、收集当地气象数据的传感器和进行数据初步处理的计算机。
监控站的主要任务是取得卫星观测数据并将这些数据传送至主控站。
主控站设在范登堡空军基地。
它对地面监控部实行全面控制。
主控站主要任务是收集各监控站对GPS卫星的全部观测数据,利用这些数据计算每颗GPS卫星的轨道和卫星钟改正值。
上行注入站也设在范登堡空军基地。
它的任务主要是在每颗卫星运行至上空时把这类导航数据及主控站的指令注入到卫星。
这种注入对每颗GPS卫星每天进行一次,并在卫星离开注入站作用范围之前进行最后的注入。
全球定位系统具有性能好、精度高、应用广的特点,是迄今最好的导航定位系统。
随着全球定位系统的不断改进,硬、软件的不断完善,应用领域正在不断地开拓,目前已遍及国民经济各种部门,并开始逐步深入人们的日常生活。
上述四个方程式中待测点坐标x、y、z 和Vto为未知参数,其中di=c△ti (i=1、2、3、4)。
di (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4到接收机之间的距离。
△ti (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的信号到达接收机所经历的时间。