KUKA工业机器人的设计
- 格式:doc
- 大小:229.50 KB
- 文档页数:6
第5期2021年2月No.5February ,2021基于“1+X ”证书的“KUKA 工业机器人操作与编程”课程设计与实施摘要:文章根据“1+X ”证书“工业机器人操作与运维”中级职业技能等级标准中所描述的知识点与技能点,对原有课程“KUKA 工业机器人操作与编程”的课程标准进行了修改,修改后的教学目标全面覆盖“工业机器人操作与运维”中级技能考核要求。
该课程教学内容基于真实的工作任务、项目及工作流程、过程等,采用OBE 教学理念进行教学情境设计,课程的学生学业评价采取过程性考核和期末终结性考核相结合的评价方式,以达到为实现X 证书职业技能考核与课程教学考核同步评价奠定基础。
关键词:“1+X ”证书;工业机器人操作与运维;“KUKA 工业机器人操作与编程”中图分类号:G642文献标志码:A 江苏科技信息Jiangsu Science &Technology Information胡志刚,陈伟卓(江苏工程职业技术学院,江苏南通226007)基金项目:2019年江苏省高等教育教改研究立项课题;项目名称:“1+X 证书制度”背景下加强技术应用能力的专业课程内容改革研究(以工业机器人技术专业为例);项目编号:2019JSJG536。
江苏省教育科学“十三五”规划立项课题;项目名称:基于OBE 理念的工业机器人专业核心课程开发与应用;项目编号:C-c/2020/03/06。
作者简介:胡志刚(1978—),男,江苏南通人,副教授,硕士;研究方向:工业机器人技术应用。
引言国务院颁布《国家职业教育改革实施方案》,提出“从2019年开始,在职业院校、应用型本科高校启动‘学历证书+若干职业技能等级证书’制度试点工作”[1]。
“1+X ”证书制度的出现是我国职业教育制度设计的一项重大改革与创新,为高职院校的专业建设提供了依据。
本文以江苏工程职业技术学院“1+X ”证书“工业机器人操作与运维”涉及相关课程内容为研究对象,通过分析“工业机器人操作与运维”职业技能等级标准所需要的专业知识和技能点,尝试通过“1+X ”证书的试点运行,及时调整相关课程的教学内容,全面提升工业机器人技术专业人才培养质量。
![KUKA机器人编程手册[4]](https://uimg.taocdn.com/fd2af613657d27284b73f242336c1eb91a37338b.webp)
KUKA机器人编程手册KUKA编程手册一、概述二、系统的结构和功能2.1 技术入门机械系统:的物理结构,包括关节、连杆、末端执行器等,决定了的运动范围和能力。
传感系统:的感知部分,包括位置、速度、力、温度、视觉等传感器,用于获取自身或环境的信息。
控制系统:的核心部分,包括控制柜、电源、通信接口等,用于控制的运动和行为。
编程系统:的软件部分,包括操作系统、应用软件、编程语言等,用于设定的任务和逻辑。
2.2 库卡的机械系统基座:固定在地面或其他平台上,支撑整个结构。
A1轴:位于基座上方,控制整个机械臂的水平旋转。
A2轴:位于A1轴上方,控制整个机械臂的垂直旋转。
A3轴:位于A2轴上方,控制中间连杆的垂直旋转。
A4轴:位于A3轴上方,控制末端连杆的水平旋转。
A5轴:位于A4轴上方,控制末端连杆的垂直旋转。
A6轴:位于A5轴上方,控制末端执行器(如夹具、焊枪等)的水平旋转。
2.3 控制系统(V)KR C4高性能:采用多核处理器和实时操作系统,实现高速、高精度和高稳定性的运动控制。
高集成:集成了电源、安全、通信、诊断等功能模块,实现了紧凑、简洁和易维护的设计。
高兼容:支持多种总线和接口标准,如EtherCAT、EtherNet/IP、PROFINET等,实现了与不同厂商和设备的无缝连接。
高扩展:支持多种扩展模块和选件,如外部轴、视觉系统、力控系统等,实现了多样化和定制化的应用需求。
2.4 KUKA smartPAD易用:采用触摸屏和按键的组合方式,实现了直观、方便和快捷的操作体验。
明晰:采用高分辨率和高亮度的显示屏,实现了清晰、鲜艳和易读的显示效果。
强大:集成了多种功能和模式,如手动、自动、编程、诊断等,实现了全面、灵活和高效的控制。
三、的操作和编程3.1 KUKA.ControlStudio软件统一:采用统一的软件平台,实现了控制系统和KUKA smartPAD的一致性和互操作性。
简洁:采用简洁的用户界面,实现了清晰、易懂和易用的操作指引。
基于 KUKA工业机器人的码垛程序设计摘要:工业机器人在码垛生产线上的应用能大大提高生产效率及减少人员的投入。
为了解决KUKA工业机器人进行包装物品的码垛时,在包装物品的大小、码垛行数、列数及层数改变后,只需要修改包装物品的两者之间的X、Y方向的行距、码垛的列数及层数实现不同的码垛数量,提高编程的效率。
结合for循环指令进行程序优化,使优化的码垛程序具有通用性强,易懂、清晰明了、维护简便、具有良好的经济效益等特点。
关键词:工业机器人;包装物品;码垛程序Palletizing program design based on KUKA industrial robotYANG XiaoHua LIU JiaXue JIANG YanhuaChengdu Technician College (Chengdu industry and Trade Vocational and Technical College), Chengdu, Sichuan 611731Abstract: The application of industrial robot in palletizing production line can greatly improve production efficiency and reduce personnel investment. In order to solve the problem that when KUKA industrial robot palletizes packaged articles, after the size, number of rows, columns and layers of packaged articles are changed, only the row spacing in X and Y directions, the number of columns and layers of packaged articles need to be modified to realize different palletizing quantities and improve the efficiency of programming. Combined with the for loop instruction, the optimized stacking program has the characteristics of strong universality, easy to understand, clear, simple maintenance and good economic benefits.Keywords: ndustrial robot; Packaged goods; Palletizing procedure机器人是一种自动的、位置可控的,具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程序操作来处理各种材料、零件、工具和专用装置。
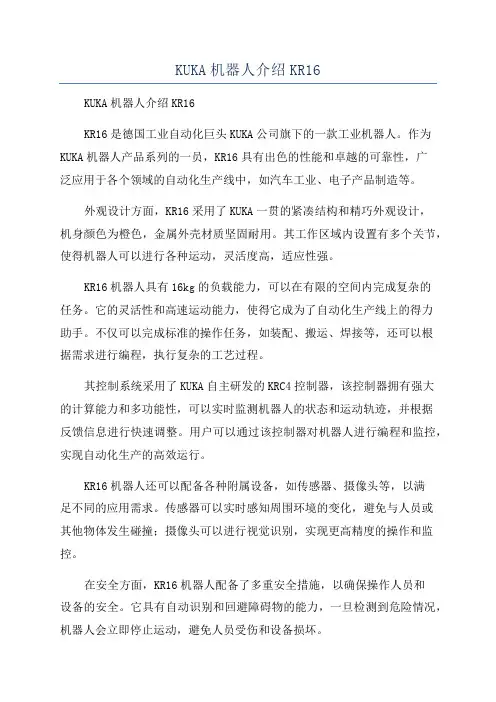
KUKA机器人介绍KR16KUKA机器人介绍KR16KR16是德国工业自动化巨头KUKA公司旗下的一款工业机器人。
作为KUKA机器人产品系列的一员,KR16具有出色的性能和卓越的可靠性,广泛应用于各个领域的自动化生产线中,如汽车工业、电子产品制造等。
外观设计方面,KR16采用了KUKA一贯的紧凑结构和精巧外观设计,机身颜色为橙色,金属外壳材质坚固耐用。
其工作区域内设置有多个关节,使得机器人可以进行各种运动,灵活度高,适应性强。
KR16机器人具有16kg的负载能力,可以在有限的空间内完成复杂的任务。
它的灵活性和高速运动能力,使得它成为了自动化生产线上的得力助手。
不仅可以完成标准的操作任务,如装配、搬运、焊接等,还可以根据需求进行编程,执行复杂的工艺过程。
其控制系统采用了KUKA自主研发的KRC4控制器,该控制器拥有强大的计算能力和多功能性,可以实时监测机器人的状态和运动轨迹,并根据反馈信息进行快速调整。
用户可以通过该控制器对机器人进行编程和监控,实现自动化生产的高效运行。
KR16机器人还可以配备各种附属设备,如传感器、摄像头等,以满足不同的应用需求。
传感器可以实时感知周围环境的变化,避免与人员或其他物体发生碰撞;摄像头可以进行视觉识别,实现更高精度的操作和监控。
在安全方面,KR16机器人配备了多重安全措施,以确保操作人员和设备的安全。
它具有自动识别和回避障碍物的能力,一旦检测到危险情况,机器人会立即停止运动,避免人员受伤和设备损坏。
由于KR16机器人的高可靠性和优良的性能,它在汽车工业的生产线上得到了广泛应用。
它可以完成汽车零部件的装配、焊接、涂装等工作,提高生产效率和产品质量。
同时,KR16机器人还在电子产品的制造、食品加工、医药生产等领域发挥着重要的作用。
总之,KUKAKR16是一款功能强大、性能优越的工业机器人。
其灵活性、高负载能力以及先进的安全措施,使其成为自动化生产线上的不可或缺的一员。

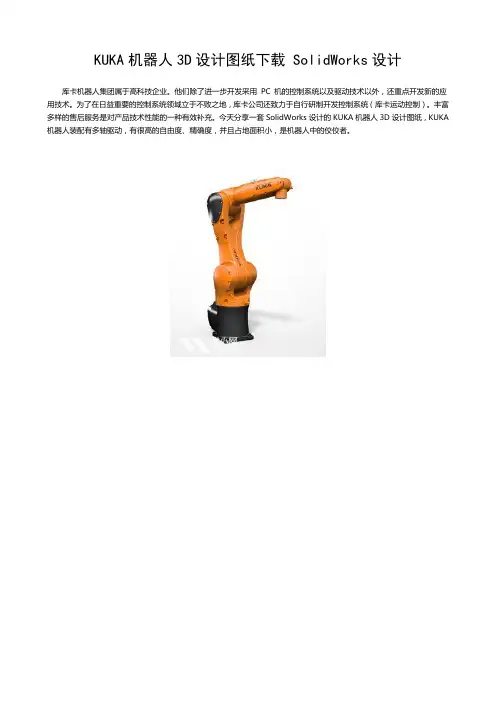
KUKA机器人3D设计图纸下载 SolidWorks设计
库卡机器人集团属于高科技企业。
他们除了进一步开发采用PC 机的控制系统以及驱动技术以外,还重点开发新的应用技术。
为了在日益重要的控制系统领域立于不败之地,库卡公司还致力于自行研制开发控制系统(库卡运动控制)。
丰富多样的售后服务是对产品技术性能的一种有效补充。
今天分享一套SolidWorks设计的KUKA机器人3D设计图纸,KUKA 机器人装配有多轴驱动,有很高的自由度、精确度,并且占地面积小,是机器人中的佼佼者。


KUKAKRC4集成方案图文版嘿,各位小伙伴们,今天给大家带来一份超级实用的KUKAKRC4集成方案!这可是我积累了十年经验的心血之作,话不多说,咱们直接进入正题。
让我给大家简单介绍一下KUKAKRC4。
这款是德国KUKA公司生产的六轴工业,具有高精度、高速度、高可靠性等特点,广泛应用于焊接、搬运、装配等行业。
咱们就开始集成方案的编写。
一、方案概述1.项目背景随着工业4.0的到来,我国制造业正面临着转型升级的压力。
为了提高生产效率,降低成本,许多企业开始引入工业。
本项目旨在将KUKAKRC4应用于某汽车零部件生产线的焊接环节,提高焊接质量和效率。
2.项目目标(1)实现焊接过程的自动化,提高生产效率。
(2)提高焊接质量,降低不良品率。
(3)降低人工成本,提高企业竞争力。
二、方案实施1.设备选型(1)KUKAKRC4(2)焊接电源及配件(3)视觉系统(4)安全防护设备2.工艺流程(1)工件上料采用自动上料设备,将工件送至焊接工位。
(2)焊接根据编程轨迹,进行焊接作业。
(3)工件下料焊接完成后,采用自动下料设备,将工件送出焊接工位。
(3)视觉检测通过视觉系统,检测焊接质量,确保不良品及时发现。
3.控制系统采用KUKAKRC4的控制器,实现焊接过程的自动化控制。
控制器与焊接电源、视觉系统等设备进行通信,实现数据交换。
4.安全防护(1)设置安全区域,防止人员误入。
(2)配置紧急停止按钮,遇险时及时停机。
(3)采用防护栏、防护网等防护设备,确保操作人员安全。
三、实施效果1.提高生产效率2.提高焊接质量焊接具有高精度、高稳定性,焊接质量得到有效保障。
3.降低人工成本焊接过程自动化,减少操作人员,降低人工成本。
4.提高企业竞争力通过引入KUKAKRC4,提高生产效率,降低成本,增强企业竞争力。
本方案将KUKAKRC4应用于汽车零部件生产线的焊接环节,实现了焊接过程的自动化,提高了生产效率,降低了成本。
希望这份方案能为大家提供一些启示,为我国制造业的转型升级贡献力量。
库卡机器人编程及程序库总结概述库卡机器人(KUKA Robot)是一种工业机器人,由德国KUKA公司开发和生产。
它具有高精度、高速度和高负载能力,广泛应用于汽车制造、物流和机械加工等领域。
库卡机器人的编程及程序库是实现其自动化操作和控制的关键。
在库卡机器人编程中,主要涉及到以下几个方面的内容:机器人语言、机器人控制器、程序开发环境和程序库。
机器人语言库卡机器人语言是一种特定于库卡机器人的编程语言,用于描述机器人的动作和操作。
它包括以下几个重要观点:1.关键字和语法规则:库卡机器人语言具有一系列的关键字和语法规则,用于表示不同的动作和操作。
例如,MOVJ表示关节运动,MOVL表示直线运动,WAIT表示等待指令等。
2.坐标系:库卡机器人语言使用不同的坐标系来描述机器人的位置和姿态。
常用的坐标系包括基坐标系(Base Coordinate System)、工具坐标系(Tool Coordinate System)和用户坐标系(User Coordinate System)等。
3.变量和数据类型:库卡机器人语言支持变量和不同的数据类型,用于存储和处理数据。
常见的数据类型包括整型、浮点型和字符串型。
4.逻辑和控制结构:库卡机器人语言支持条件判断和循环等控制结构,用于实现复杂的逻辑和流程控制。
机器人控制器库卡机器人控制器是机器人的核心部件,用于控制机器人的运动和操作。
它包括以下几个关键发现:1.硬件结构:库卡机器人控制器由主控制器和外围设备组成,主控制器负责控制机器人的运动,外围设备包括输入输出模块、传感器和执行器等。
2.通讯接口:库卡机器人控制器支持多种通讯接口,用于与外部设备进行数据交换和控制。
常见的通讯接口包括以太网、串口和数字输入输出等。
3.运动控制:库卡机器人控制器具有强大的运动控制能力,可以实现精确的位置控制和轨迹规划。
它可以根据编程指令控制机器人的关节运动和直线运动等。
4.安全保护:库卡机器人控制器内置了多种安全保护功能,可以检测和处理异常情况,确保机器人和操作人员的安全。
简述工业机器人的设计内容与步骤工业机器人是一种用于自动化生产的机械设备,它能够完成各种复杂的操作任务,提高生产效率和质量。
设计工业机器人需要考虑多个方面,包括机器人的结构、控制系统、传感器和执行器等。
下面将详细介绍工业机器人的设计内容与步骤。
一、机器人的结构设计机器人的结构设计是工业机器人设计的重要部分,它决定了机器人的运动范围和负载能力。
在结构设计中,需要考虑机器人的关节数量、关节类型、关节传动方式等。
关节数量决定了机器人的自由度,关节类型可以根据应用需求选择,关节传动方式可以采用齿轮传动、带传动等。
二、机器人的控制系统设计机器人的控制系统设计是工业机器人设计的关键环节,它包括机器人的控制器和编程软件。
控制器是机器人的大脑,它接收传感器反馈的信号,并根据程序指令控制机器人的运动。
编程软件用于编写机器人的控制程序,实现各种操作任务。
在控制系统设计中,需要考虑机器人的运动规划、轨迹控制、碰撞检测等功能。
三、机器人的传感器设计机器人的传感器设计是工业机器人设计的重要组成部分,它能够感知周围环境的信息,为机器人的自主决策提供数据支持。
常见的传感器包括视觉传感器、力传感器、位置传感器等。
视觉传感器可以用于目标识别和定位,力传感器可以用于力控制和安全保护,位置传感器可以用于位置反馈和运动控制。
四、机器人的执行器设计机器人的执行器设计是工业机器人设计的重要组成部分,它负责机器人的运动执行。
常见的执行器包括电机、气缸、液压缸等。
电机可以用于驱动机器人的关节运动,气缸可以用于实现机器人的夹持和释放动作,液压缸可以用于实现机器人的重载操作。
工业机器人的设计步骤如下:1.需求分析:确定机器人的应用领域和工作任务,明确设计目标和要求。
2.结构设计:根据机器人的应用需求,设计机器人的结构,包括关节数量、关节类型、关节传动方式等。
3.控制系统设计:根据机器人的运动规划和控制要求,设计机器人的控制系统,包括控制器和编程软件。
KUKA工业机器人精准定位教学平台的设计摘要:二十一世纪计算机网络技术的兴起以及广泛的应用,促使网络逐渐成为我们日常生活中不可替代的重要组成部分,现在教育行业进行网络教学也逐渐成为了未来的发展趋势。
现在已经有很多高校开始普及了机器人教学,通过学校实验室以及社会中的一些培训机构进行对学生的培训教育。
但是由于高校实验室的有限资源无法满足除学习比赛之外更多的应用需求,然而社会机构中的收费又比较高,因此进行对机器人技术的教学平台设计,甚至使得中小学生也可以进行学习是非常重要以及有价值的研究课题。
本文就围绕这一课题进行了对机器人教学平台设计的提案以及分析。
关键词:机器人;精准定位;教学平台引言:近几年我国信息化技术的飞速发展促进了工业对该技术的广泛应用,目前工业中机器人的使用已经成为了目前代表生产水平的重要衡量因素。
国内很多高等院校都开始将工业机器人引入到学生的工程实训的项目中了,以加强学生的实践动手能力,体现高校的培养人才的特色。
但是在高校的机器人实训过程中,往往会由于课程条件以及相关时间的约束下不能够满足对机器人系统学习的需求,所以构建可以进一步使得学生可以深入学习工业机器人的全新教学平台是非常有必要的。
工业机器人的常用应用手段是进行对货物的搬运,因此针对这一特点,所需工件所放置的位置和具体姿态都是设定好的,而且是采用人工抓取,因此可以调整工件的位置和姿态,采用程序控制对工件进行精准定位,抓取和运输,实现工件运输的全自动控制。
在充分应用高校相关实训设备的基础上进一步加强对工业机器人的认识。
一、项目研究内容传统机器人的定位系统是需要相关人员经过精确的计算之后对机器人的运动轨迹通过提前编程来实现控制的,这样机器人的运动就比较单一,往往对工件的定位以及搬运效果很容易受到外界因素的干扰,在充分的进行相关文献的查阅之后,发现可以通过将视觉系统安装在工业机器人本体上,提高工业机器人对实际工件的处理能力。
不需要提前对工[ 基金项目:辽宁科技大学大学生创新创业计划专项经费资助项目(项目编号:202010146263)。
目次前言 (3)1 目的.............................................................................42 范围.............................................................................43 规范性引用文件...................................................................44 术语和定义.......................................................................45 机器人集成标准...................................................................4 5.1 首次上电运行..........................................................4 1. 首次上电运行.........................................................45.2 机器人周边设备通讯及配置.................................................91. 机器人与PLC接口通讯...................................................92. 机器人与焊枪、焊机接口配置.............................................113. 机器人与抓手接口配置..................................................174. 机器人与水气单元配置..................................................185.3 机器人调试内容.........................................................191. 工具坐标建立.........................................................192. 工具重量测试.........................................................203.Tune枪..............................................................254. 抓放枪、抓放抓手调试...................................................355. 车身坐标系建立......................................................386. 点焊参数设定.........................................................407. 焊点路径调试.........................................................408. 干涉区设定..........................................................429.节拍优化.............................................................465.4 特殊功能机器人调试......................................................461. 涂胶调试.............................................................462. 弧焊调试.............................................................606 文件更改状态 (72)附件1:............................................................................73附件2:............................................................................错误!未定义书签。
毕业设计任务书课题: KUKA工业机器人的设计
专业机械设计制造及其自动化
学生姓名周诗君
班级 B机制102
学号 1010110231
指导教师程世利
专业系主任吴卫东
发放日期 2013年12月31日
设计一台KUKA工业机器人。
具体设计包括总体结构的设计、大臂、小臂及关节的设计校核、传动机构的设计、相关元器件的选取等。
主要内容有:
1.总体设计
1)制定总体方案及各部件的布置。
2. 大臂、小臂及关节的设计
1)大臂的设计以及校核;2)举升构件的设计校核;3)关节的设计。
3. 传动系统的设计
4.元器件的选型计算
5. 各个非标准零件的设计
二、设计依据
1.课题来源:生产实际
2.产品名称:KUKA工业机器人
3.设计依据
1)负荷不小于10kg;
2)工作范围不小于1.5m×1.5m;
3)重复定位精度1.5mm。
1.该机器人应能满足焊接的工作要求,保证焊接精度;
2.该机器人应运转平稳,工作可靠,结构简单,装卸方便,便于维修、调整;3.该机器人尽量能用通用件(中间底座可自行设计)以便降低制造成本;
4.设计图样总量:折合成A0幅面在3张以上;工具要求:二维图用AutoCAD软件绘制,三维造型用Pro-E软件;过程要求:装配图需提供手工草图;
5.毕业设计说明书按照学校规定的格式规范统一编排、打印,字数不少于1万字;6.查阅文献资料10篇以上,撰写1500~2000字左右的文献综述,并有不少于3000 汉字的外文资料翻译;
7.到相关单位进行毕业实习,撰写不少于3000字实习报告;
8.撰写开题报告;
9.进行毕业设计基础知识训练,按照规定要求考核。
四、毕业设计物化成果的具体内容及要求
1.设计成果要求
1)毕业设计说明书 1 份
2)机器人总装配图 1 张
3)部装图 2 张
4)零件图不少于8张
5)零件三维造型图 1 张
2.外文资料翻译(英译中)要求
1)外文翻译材料中文字不少于3000字。
2)内容必须与毕业设计课题相关;
3)所选外文资料应是近10年的文章,并标明文章出处。
五、毕业设计(论文)进度计划
六、主要参考文献:
[1] 丛凤廷.组合机床设计(第二版)[M].上海:上海科技出版社,1994.
[2] 谢家瀛.组合机床设计参考手册[M].北京:机械工业出版社,1994.
[3] 大连组合机床研究所.组合机床设计(第一分册)[M].北京:机械工业出版社,1975.
[4] 大连组合机床研究所.组合机床设计参考图册[M].北京:机械工业出版社,1975.
[5] 姚永明.非标准设备设计[M].上海:上海交通大学出版社,1999.
[6] 金振华.组合机床及其调整与使用[M].北京:机械工业出版社,1990.
[7] 东北重型机械学院.机床夹具设计手册(第二版)[M].上海:上海科技出版社,1988.
[8] 刘文剑.夹具工程师手册[M].哈尔滨:黑龙江科技出版社,1987.
[9] 杨黎明.机床夹具设计手册[M].北京:国防工业出版社,1996.
(包括各种机械设计手册、专著、论文、报告等,参考文献数量不得少于10篇。
)(该项暂不填写,由学生提供,教师把关)
七、其他
八、专业系审查意见
系主任:
年月日九、机械工程学院优集学院意见
院长:
年月日。