过程装备控制技术及应用课后习题答案)
- 格式:doc
- 大小:51.50 KB
- 文档页数:2
1. 过程装备的三项基本要求过程装备的三项基本要求:安全性、经济性和稳定性.A.安全性:指整个生产过程中确保人身和设备的安全B.经济性:指在生产同样质量和数量产品所消耗的能量和原材料最少,也就是要求生产成本低而效率高C.稳定性:指系统应具有抵抗外部干扰,保持生产过程长期稳定运行的能力.2. 过程装备控制的主要参数:温度、压力、流量、液位(或物位)、成分和物性等.3. 流程工业四大参数:温度、压力、流量、液位(或物位)4. 控制系统的组成控制系统的组成:(1)被控对象 (2)测量元件和变送器 (3)调节器 (4)执行器5. 控制系统各参量及其作用:1.被控变量 y 指需要控制的工艺参数,它是被控对象的输出信号 2.给定值(或设定值) ys 对应于生产过程中被控变量的期望值 3.测量值 ym 由检测元件得到的被控变量的实际值 4.操纵变量(或控制变量)m 受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,它是调节阀的输出信号5.干扰(或外界扰动)f 引起被控变量偏离给定值的,除操纵变量以外的各种因素6.偏差信号 e 在理论上应该是被控变量的实际值与给定值之差7.控制信号u 控制器将偏差按一定规律计算得到的量。
6. 控制系统的分类(1)控制系统的分类:按给定值 a 定值控制系统;随动控制系统;程序控制系统(2) b c 按输出信号的影响 a 闭环控制;b 开环控制(3)按系统克服干扰的方式 a 反馈控制系统;b 前馈控制系统;c 前馈-反馈控制系统7. 控制系统过度过程定义:从被控对象受到干扰作用使被控变量偏离给定值时起,调节器开始发挥作用,使被控变量回复到给定值附近范围内,然而这一回复并不是瞬间完成的,而是要经历一个过程,这个过程就是控制系统的过渡过程。
8. 阶跃干扰下过渡过程的基本形式及其使用特点(1)发散振荡过程:这是一种不稳定的阶跃干扰下过渡过程的基本形式及其使用特点:过渡过程,因此要尽量避免(2)等幅振荡过程:被控变量在某稳定值附近振荡,而振荡幅度恒定不变,这意味着系统在受到阶跃干扰作用后,就不能再稳定下来,一般不采用(3)衰减振荡过程:被控变量在稳定值附近上下波动,经过两三个周期就稳定下来,这是一种稳定的过渡过程(4)非振荡的过渡过程:是一个稳定的过渡过程,但与衰减振荡相比,其回复到平衡状态的速度慢,时间长,一般不采用。
可编辑修改精选全文完整版1下列哪一项不是生产过程自动化包含的内容(D)A 自动检测系统B 自动控制系统C信号联锁系统D自动识别系统答案:D 生产过程自动化主要包含自动检测系统、信号联锁系统、自动操纵系统、自动控制系统2闭环控制系统是根据______B_____信号进行控制的。
A被控量B偏差C扰动D给定值3 下列关于串级控制系统说法错误的是(B)A 串级控制系统包含两个回路,主环和副环B 应使系统中主要干扰包含在主环内C应使非线性环节尽量包含在副环中D 当对象具有较大的纯滞后时,应使副环尽量少包含或不包含纯滞后4根据爆炸气体的分级和分组,下列气体最危险的是( D )A甲烷(ⅠT1)B丁烷(ⅡA T2)C异戊二烯(ⅡB T3)D硝酸乙酯(ⅡC T6)5对于PID调节器,I的作用是( B )AI的作用是减小动态偏差B I的作用是消除静态偏差CI的作用是消除动态偏差D I对静态偏差无作用6.关于工艺介质分路以下哪个是正确的DA.静态性能好B.响应快C.可以采用三通阀D以上都是7.继电器的作用有哪些DA控制B放大C保护和调节D以上都是8.电动仪表控制的特点(D)A.能源简单 B.防爆 C.可实现无滞后的远距离传送D以上都是9.在化学反应器的控制中,以下属于约束条件的是EA催化剂活性 B 温度压力 C 反应物配比 D 流速 E 以上都是10.不是精馏塔的控制特性是哪一个AA对象是线性,系统动态响应快B多输入,多输出,被控变量,操纵变量多C系统间关联D控制要求高,方案多一.选择题1.控制系统性能指标中的余差反映了系统的(B)A.稳定性B.准确性C.响应快慢2.偏差积分性能指标中对大偏差敏感的是(B)A.平方误差积分B.时间积平方误差积分C.绝对误差积分3.为防止锅炉生产中产生脱火现象应采用(A)控制A.选择B.比值C.串级4.当一台压缩机的出口压力不够时,应采用2台或以上的(B)A.并联B.串联C.没所谓5.过程控制的第一要求是(A)A.安全性B.经济性C.稳定性6.图示标志的含义是(C)A.自动安装B.集中盘面安装C.就地安装7.如图想要增加容器的真空度,阀门开度应(A)A.↑B.↓C.都可以8.下列属于串级控制的是(A)ACB9.如下图所示的换热器的控制系统流程图,操纵变量是(B)A.物料出口温度B.蒸汽流量C.换热量10.液氨蒸发器的单回路控制如下图,应用(C)控制系统实现待冷却物料温度控制并保证液氨不满罐A.串级B.比值C.选择1上图中a代表什么(A )A 调节器B 执行器C 被控对象D测量元件及变送器2 下列哪个不是被控对象特性的参数(D )A 放大系数B 时间常数C 滞后时间D 变量偏差3 反馈控制系统的控制依据是什么(C )A干扰量的变化 B 被控变量 C 被控变量的偏差 D 干扰量的波动4 一下哪项不属于定比值控制系统(D )A 开环比值控制系统B 单闭环比值控制系统C 双闭环比值控制系统D 双开环比值控制系统5 “一个执行器,两个控制器”是哪个控制系统的特点(B )A 前馈控制系统B 串级控制系统C 比值控制系统D 选择性控制系统6 电动控制仪表中电流信号电动Ⅲ型仪表的电流为(C )A 0--10mAB 10--20mAC 4—20mAD 0—20mA7 下图属于什么控制(D )A 分程控制B 前馈控制C 分段控制D 串级控制8 “任何扰动对系统的影响均可消除”是哪个控制的优点(D )A 前馈控制B 串级控制C 比值控制D 反馈控制9 实现均匀控制有几种方案(B )A 2种B 3种C 4种D 5种10 下列哪个物质属于第Ⅰ类爆炸性物质(A )A 矿井甲烷B 可燃蒸汽C 易燃纤维D 爆炸性气体过程装备控制技术及运用一、选择题。
过程装备控制技术及应用试题一、选择题(每题2分,共20分)1、闭环控制系统是根据___________信号进行控制的。
A、被控量B、偏差C、扰动D、给定值2、DDZ-Ⅲ型仪表采用国际标准信号,现场传输信号是(4~20mADC ),控制联络信号为1~5VDC。
(A)0~10mADC;(B)4~20mADC;(C)1~5VDC;(D)1~10VDC。
3、对于PID调节器( I的作用是消除静态偏差、D的作用是减小动态偏差)。
(A)I的作用是减小动态偏差、D的作用是消除静态偏差;(B)I的作用是消除静态偏差、D的作用是消除动态偏差;(C)I的作用是消除动态偏差、D的作用是减小静态偏差;(D)I的作用是消除静态偏差、D的作用是减小动态偏差。
4、因为( 微分动作)对于干扰的反应是很灵敏的。
因此,它常用于温度的调节,一般不能用于压力、流量、液位的调节。
(A)比例动作;(B)积分动作;(C)微分动作;(D)比例积分。
5、调节系统中用临界比例带法整定参数的具体方法是( 先将Ti置最大,TD置最小,δP 置较大) 。
(A)先将Ti置最大,TD置最小,δP置较大;(B)先将Ti置最小,TD置最大,δP置较大;(C)先将Ti置最小,TD置最小,δP置较小;(D)先将Ti置最小,TD置最小,δP置较大。
6、调节对象在动态特性测试中,应用最多的一种典型输入信号是(阶跃函数)。
(A)阶跃函数;(B)加速度函数;(C)正弦函数;(D)指数函数。
7、霍尔压力变送器是利用霍尔效应把压力作用下的弹性元件位移信号转换成( 电动势)信号,来反应压力的变化。
(A)电流;(B)相位;(C)电动势;(D)以上都是8、要使PID调节器为比例规律,其积分时间Ti和微分时间TD应设置为( ∞、0 )。
(A)∞、∞;(B)∞、0;(C)0、0;(D)0、∞9、动态偏差是指调节过程中( 被调量与给定值)之间的最大偏差。
(A)被调量与调节量;(B)调节量与给定值;(C)被调量与给定值;(D)以上都不是10、需要知道对象的动态特性,才能进行参数整定的工程方法是___________。
2.自动控制系统主要由哪几个环节组成?自动控制系统常用的术语有哪些?答:一部分是起控制作用的全套自动控制装置,包括测量仪表,变送器,控制仪表以及执行器等;另一部分是自动控制装置控制下的生产设备,即被控对象。
8.什么是自动控制系统的过度过程?在阶跃干扰作用下有哪几种基本形式?其中哪些能满足自动控制的要求,哪些不能,为什么?答:系统从一个平衡状态进入另一个平衡状态之间的过程称为系统的过度过程。
①发散振荡过程②等幅振荡过程③衰减振荡过程④非振荡的单调过程。
衰减振荡和非振荡的单调过程属于稳定的过渡过程,能满足自动控制的要求,其它的不能。
9.试画出衰减比分别为n<1,n=1,n>1,n→∞时的过度过程曲线?4.在控制系统中,对象的放大系数,时间常数,滞后时间对控制有什么影响?答:对于不同的通道,对象的特性参数(K,T ,τ)对控制作用的影响是不同的。
对于控制通道:放大系数K大,操纵变量的变化对被控变量的影响就大,即控制作用对扰动的补偿能力强,余差也小;放大系数K小,控制作用的影响不显著,被控变量的变化缓慢。
但K太大,会使控制作用对被控变量的影响过强,使系统的稳定性下降。
在相同的控制作用下,时间常数T 大,则被控变量的变化比较缓慢,此时对象比较平稳,容易进行控制,但过渡过程时间较大;若时间常数T小,则被控变量变化速度快,不易控制。
时间常数太大或太小,在控制上都将存在一定困难,因此,需根据实际情况适中考虑。
滞后时间τ的存在,使得控制作用总是落后于被控变量的变化,造成被控变量的最大偏差增大,控制质量下降。
因此,应尽量减小滞后时间τ。
对于扰动通道:放大系数K大对控制不利,因为当扰动频繁出现且幅度较大时,被控变量的波动就会很大,使得最大偏差增大;而放大系数k小,即使扰动较大,对被控变量仍然不会产生多大影响。
时间常数T大,扰动作用比较平缓,被控变量变化较平稳,对象较易控制。
纯滞后的存在,相当于将扰动推迟τ0时间才进入系统,并不影响控制系统的品质;而容量滞后的存在,则将使阶跃扰动的影响趋于缓和,被控变量的变化相应也缓和些,因此,对系统是有利的。
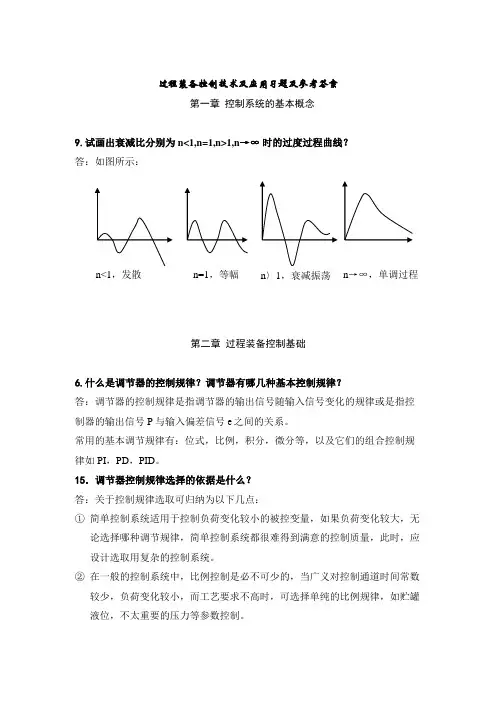
过程装备控制技术及应用习题及参考答案第一章 控制系统的基本概念9.试画出衰减比分别为n<1,n=1,n>1,n →∞ 时的过度过程曲线?答:如图所示:第二章 过程装备控制基础6.什么是调节器的控制规律?调节器有哪几种基本控制规律?答:调节器的控制规律是指调节器的输出信号随输入信号变化的规律或是指控制器的输出信号P 与输入偏差信号e 之间的关系。
常用的基本调节规律有:位式,比例,积分,微分等,以及它们的组合控制规律如PI ,PD ,PID 。
15.调节器控制规律选择的依据是什么?答:关于控制规律选取可归纳为以下几点:① 简单控制系统适用于控制负荷变化较小的被控变量,如果负荷变化较大,无论选择哪种调节规律,简单控制系统都很难得到满意的控制质量,此时,应设计选取用复杂的控制系统。
② 在一般的控制系统中,比例控制是必不可少的,当广义对控制通道时间常数较少,负荷变化较小,而工艺要求不高时,可选择单纯的比例规律,如贮罐液位,不太重要的压力等参数控制。
n<1,发散振荡n 〉1,衰减振荡 n=1,等幅振荡 n →∞,单调过程③ 当广义对象控制通道时间常数较,负荷变化较小,而工艺要求无余差时,可选用比例积分调节规律,如管道压力,流量等参数的控制。
④ 当广义对象控制通道时间常数较大或容量滞后较大时,应引入微分作用,如工艺充许消除余差,可选用比例微分调节规律;如工艺要求无余差时,则选用PID 调节规律,如温度,成分,PH 等参数控制。
⑤ 如果被控对象传递参数可用 近似,则可根据对象的可控比t/T 选择哪个调节器的调节规律。
当t/T 时,选用P 或PI ;当 时,选PD 或PID ;当 时,采用简单控制系统往往不能满足控制要求,这时应选用复杂控制系统。
第三章 过程检测技术13用两只分度号为K 的热电偶测量A 区与B 区的温差,连接方法如图3-79所示。
若(1) 0220A t C = , 020B t C =(2)0200A t C =, 0500B t C =试分别求两种情况下的示值误差,并解释为何与实际温差不同.解:查热电偶分度号表:K 型热电偶:20℃ 200℃ 220℃ 500E: 0.798mv 8.137mv 8.937mv 20.640mv(1) ΔE=8.938-0.798=8.140mv反查K 热电偶分度号表: 201℃-----8.177mv内析求得: Δt=200.075℃(2) ΔE=20.640-8.137=12.503℃反查K 分度号表:307----12.498℃; 308----12.539℃内析求得: Δt=307.12℃分析原因:低温度下热电势与温度线性关系较好,高温时误差较大。
过程装备控制习题答案过程装备控制习题答案过程装备控制是工程领域中的重要课题,涉及到工业生产中的自动化控制、监测和优化。
在学习过程装备控制的过程中,习题练习是必不可少的一部分。
本文将为大家提供一些过程装备控制习题的答案,希望对大家的学习有所帮助。
1. 什么是过程装备控制?过程装备控制是指在工业生产过程中,通过自动化控制系统对装备进行监测、控制和优化,以实现生产过程的高效、安全和稳定。
它涉及到传感器、执行器、控制器等装备的使用,通过数据采集、信号处理和控制算法的运算,实现对装备运行状态的监测和控制。
2. 过程装备控制的主要目标是什么?过程装备控制的主要目标是提高生产过程的效率、安全性和稳定性。
通过对装备运行状态的监测和控制,可以及时发现问题并采取相应的措施,避免生产事故的发生。
同时,通过优化控制算法和参数,可以提高生产过程的效率,减少能源和原材料的消耗。
3. 过程装备控制中常用的传感器有哪些?过程装备控制中常用的传感器包括温度传感器、压力传感器、流量传感器、液位传感器等。
这些传感器可以将装备运行状态转化为电信号,供控制系统进行处理和分析。
4. 过程装备控制中常用的控制器有哪些?过程装备控制中常用的控制器包括PID控制器、模糊控制器和自适应控制器等。
PID控制器是最常用的一种控制器,它通过比较实际值和设定值的差异,调整控制信号,使得装备的输出值趋近于设定值。
模糊控制器和自适应控制器则更加复杂,可以根据装备运行状态的变化,自动调整控制算法和参数。
5. 过程装备控制中常用的优化算法有哪些?过程装备控制中常用的优化算法包括遗传算法、模拟退火算法和粒子群算法等。
这些算法可以通过对控制参数的搜索和优化,找到使得装备运行状态最优的控制策略。
6. 过程装备控制中的常见问题有哪些?过程装备控制中常见的问题包括装备故障、控制信号失效和控制参数漂移等。
这些问题可能导致装备运行不稳定或者无法达到设定值,需要及时进行故障诊断和修复。

过程装备控制技术习题及参考答案第一章控制系统的基本概念1.什么叫生产过程自动化?生产过程自动化主要包含了哪些内容?答:利用自动化装置来管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
2.自动控制系统主要由哪几个环节组成?自动控制系统常用的术语有哪些?答:一个自动控制系统主要有两大部分组成:一部分是起控制作用的全套自动控制装置,包括测量仪表,变送器,控制仪表以及执行器等;另一部分是自动控制装置控制下的生产设备,即被控对象。
自动控制系统常用的术语有:被控变量y——被控对象内要求保持设定数值的工艺参数,即需要控制的工艺参数,如锅炉汽包的水位,反应温度;给定值(或设定值)y s——对应于生产过程中被控变量的期望值;测量值y m——由检测原件得到的被控变量的实际值;操纵变量(或控制变量)m——受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,是调节阀的输出信号;干扰f——引起被控变量偏离给定值的,除操纵变量以外的各种因素;偏差信号(e)——被控变量的实际值与给定值之差,即e=y m - y s 控制信号u——控制器将偏差按一定规律计算得到的量。
3.什么是自动控制系统的方框图?它与工艺流程图有什么不同?答:自动控制系统的方框图上是由传递方块、信号线(带有箭头的线段)、综合点、分支点构成的表示控制系统组成和作用的图形。
其中每一个分块代表系统中的一个组成部分,方块内填入表示其自身特性的数学表达式;方块间用带有箭头的线段表示相互间的关系及信号的流向。
采用方块图可直观地显示出系统中各组成部分以及它们之间的相互影响和信号的联系,以便对系统特性进行分析和研究。
而工艺流程图则是以形象的图形、符号、代号,表示出工艺过程选用的化工设备、管路、附件和仪表自控等的排列及连接,借以表达在一个化工生产中物料和能量的变化过程,即原料→成品全过程中物料和能量发生的变化及其流向。

过程装备控制技术及应用习题及参考答案第一章控制系统的基本概念1.什么叫生产过程自动化?生产过程自动化主要包含了哪些内容?答:利用自动化装置来管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
2.自动控制系统主要由哪几个环节组成?自动控制系统常用的术语有哪些?答:一个自动控制系统主要有两大部分组成:一部分是起控制作用的全套自动控制装置,包括测量仪表,变送器,控制仪表以及执行器等;另一部分是自动控制装置控制下的生产设备,即被控对象。
自动控制系统常用的术语有:被控变量y——被控对象内要求保持设定数值的工艺参数,即需要控制的工艺参数,如锅炉汽包的水位,反应温度;给定值(或设定值)y s——对应于生产过程中被控变量的期望值;测量值y m——由检测原件得到的被控变量的实际值;操纵变量(或控制变量)m——受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,是调节阀的输出信号;干扰f——引起被控变量偏离给定值的,除操纵变量以外的各种因素;偏差信号(e)——被控变量的实际值与给定值之差,即e=y m-y s控制信号u——控制器将偏差按一定规律计算得到的量。
3.什么是自动控制系统的方框图?它与工艺流程图有什么不同?答:自动控制系统的方框图上是由传递方块、信号线(带有箭头的线段)、综合点、分支点构成的表示控制系统组成和作用的图形。
其中每一个分块代表系统中的一个组成部分,方块内填入表示其自身特性的数学表达式;方块间用带有箭头的线段表示相互间的关系及信号的流向。
采用方块图可直观地显示出系统中各组成部分以及它们之间的相互影响和信号的联系,以便对系统特性进行分析和研究。
而工艺流程图则是以形象的图形、符号、代号,表示出工艺过程选用的化工设备、管路、附件和仪表自控等的排列及连接,借以表达在一个化工生产中物料和能量的变化过程,即原料→成品全过程中物料和能量发生的变化及其流向。

第一章1.什么叫生产过程自动化?生产过程自动化主要包含了哪些内容答:利用自动化装置来管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
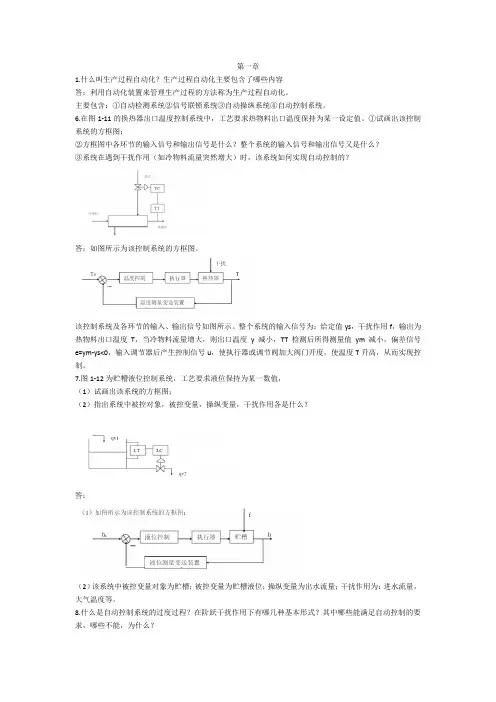
6.在图1-11的换热器出口温度控制系统中,工艺要求热物料出口温度保持为某一设定值。
①试画出该控制系统的方框图;②方框图中各环节的输入信号和输出信号是什么?整个系统的输入信号和输出信号又是什么?③系统在遇到干扰作用(如冷物料流量突然增大)时,该系统如何实现自动控制的?答:如图所示为该控制系统的方框图。
该控制系统及各环节的输入、输出信号如图所示。
整个系统的输入信号为:给定值ys,干扰作用f,输出为热物料出口温度T,当冷物料流量增大,则出口温度y减小,TT检测后所得测量值ym减小,偏差信号e=ym-ys<0,输入调节器后产生控制信号u,使执行器或调节阀加大阀门开度,使温度T升高,从而实现控制。
7.图1-12为贮糟液位控制系统,工艺要求液位保持为某一数值,(1)试画出该系统的方框图;(2)指出系统中被控对象,被控变量,操纵变量,干扰作用各是什么?答:(2)该系统中被控变量对象为贮槽;被控变量为贮槽液位;操纵变量为出水流量;干扰作用为:进水流量,大气温度等。
8.什么是自动控制系统的过度过程?在阶跃干扰作用下有哪几种基本形式?其中哪些能满足自动控制的要求,哪些不能,为什么?答:对于任何一个控制系统,扰动作用是不可避免的,系统受到扰动作用后,其平衡状态被破坏,被控变量就要发生波动,在自动控制作用下经过一段时间,使被控变量回复到新的稳定状态,即系统从一个平衡状态进入另一个平衡状态之间的过程称为系统的过度过程。
在阶跃干扰作用下,其过度过程曲线有:①发散振荡过程②等幅振荡过程③衰减振荡过程④非振荡的单调过程。
其中衰减振荡和非振荡的单调过程属于稳定的过渡过程,能满足自动控制的要求,其它的不能。
9.试画出衰减比分别为n<1,n=1,n>1,n→∞时的过度过程曲线?答:如图所示:10.表示衰减振荡过程的控制指标有哪些?答:表示衰减振荡过程的控制指标有:①大偏差A——指过渡过程中被控变量偏离设定值的最大值,即被控变量第一个波的峰值与给定值的差。
《过程装备控制技术及应用》(本)课后复习题第一章控制系统的基本概念一、填空题1、评定过渡过程的性能指标主要有。
2、自动控制系统按设定值的不同形式可分为、、等控制系统。
3、过程控制系统基本组成是、、和等环节。
二、判断题1、系统的过渡时间短,则调节系统能及时克服干扰作用,调节质量就越高。
()2、余差是指调节过程结束后,被调参数稳定值与测量值之差。
()三、选择题1、系统的衰减一般为时最好。
A.20︰1 B. 8︰1 C. 4︰12、系统过渡过程中的最大偏差是指调节过程中出现的最大差值。
A.被调参数指示值与给定值的 B. 被调参数指示值与测量值的C. 新的稳定值与给定值的四、简答题1、在阶跃扰动作用下,自控系统的过渡过程有哪些基本形式?其主要品质指标有哪些?2、化工自动化主要包括哪些容?3、自动控制系统主要由哪些环节组成?4、图1-1为某列管式蒸汽加热器控制流程图。
试分别说明图中PI-307、TRC-303、FRC-305所代表的意义。
图1-1 某列管式蒸汽加热器控制流程图[P16,图1-17]5、在自动控制系统中,测量变送装置、控制器、执行器各起什么作用?6、图1-2为一组在阶跃扰动作用下的过渡过程曲线。
⑴指出每种过程曲线的名称。
⑵试指出哪些过程曲线能基本满足控制要求?哪些不能?为什么?图1-2 过渡过程曲线7、试画出衰减比分别为n<1,n=1,n>1,n→∞时的过度过程曲线?五、计算题某化学反应器工艺规定操作温度为(800±10)℃。
为确保生产安全,控制中温度最高不得超过850℃。
现运行的温度控制系统,在最大阶跃扰动下的过渡过程曲线如图1-3所示。
⑴分别求出最大偏差、余差、衰减比、过渡时间(温度进入按±2%新稳态值即视为系统已稳定来确定)和振荡周期。
⑵说明此温度控制系统是否满足工艺要求。
图1-3 温度控制系统过渡过程曲线第二章过程装备控制基础一、填空题1、按对象静态特性选择调节参数时,调节通道放大倍数越大,则克服干扰能力就越。
过程装备控制技术习题及参考答案第一章 控制系统的基本概念1.什么叫生产过程自动化?生产过程自动化主要包含了哪些内容?答:利用自动化装置来管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
4.在自动控制系统中,什么是干扰作用?什么是控制作用?两者有什么关系?答:干扰作用是由干扰因素施加于被控对象并引起被控变量偏离给定值的作用;控制作用是由控制器或执行器作用于被控对象,通过改变操纵变量克服干扰作用,使被控变量保持在给定值,两者的相同之处在于都是施加于被控对象的作用,不同之处在于干扰作用是使被控变量偏离给定值,而控制作用是使被控变量接近给定值。
9.试画出衰减比分别为n<1,n=1,n>1,n →∞ 时的过度过程曲线?答:如图所示:10.表示衰减振荡过程的控制指标有哪些?答:表示衰减振荡过程的控制指标有:①最大偏差A ——指过渡过程中被控变量偏离设定值的最大值,即被控变量第一个波的峰值与给定值的差。
②衰减比n ——过渡过程曲线上同方向的相邻两个波峰之比。
③回复时间(过渡时间)t s ——指被控变量从过渡状态回复到新的平衡状态的时间间隔,即整个过渡过程所经历的时间。
④差e(∞ )——指过渡过程终了时被控变量新的稳态值与设定值之差。
⑤振荡周期T ——过渡过程的第一个波峰与相邻的第二个同向波峰之间的时间间隔,其倒数称为振荡频率。
第二章 过程装备控制基础1.什么是被控对象的特性?表征被控对象特性的参数有哪些?它们的物理意义是什么? n<1,发散振荡 n 〉1,衰减振荡 n=1,等幅振荡 n →∞,单调过程答:所谓被控对象的特性,是指当被控对象的输入变量发生变化时,其输出变量随时间的变化规律(包括变化的大小,速度),描述被控对象特性的参数有放大系数K,时间常数T和滞后时间τ。
K——被控对象重新达到平衡状态时的输出变化量与输入变化量之比。
由于放大系数K反映的是对象处于稳定状态下的输出和输入之间的关系,所以放大系数是描述对象静态特性的参数。
过程裝备控制技术习题及参考答秦第一章控制系统的基本概念1 .什么叫生产过程自动化?生产过程自动化主要包含了哪些内容?答:利川自动化装置來管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
2.自动控制系统主要由哪几个环节组成?自动控制系统常用的术语有哪些?答:一个自动控制系统主要冇两大部分组成:一部分是起控制作用的全套自动控制装置,包括测量仪表,变送器,控制仪表以及执行器等;另一部分是自动控制装置控制下的生产设备,即被控对象。
自动控制系统常川的术语有:被控变量y——被控対象内要求保持设定数值的工艺参数,即需要控制的工艺参数,如锅炉汽包的水位,反应温度:给定值(或设定值)y s——对应于生产过程中被控变量的期望值;测量值ym——由检测原件得到的被控变量的实际值;操纵变量(或控制变量)m——受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,是调节阀的输出信号;干扰f—引起被控变量偏离给定值的,除操纵变量以外的各种因素;偏差信号(e)——被控变量的实际值与给定值之差,即e=y m- y s控制信号u——控制器将偏养按一定规律计算得到的最。
3.什么是自动控制系统的方框图?它与工艺流程图有什么不同?答:自动控制系统的方框图上是由传递方块、信号线(带有箭头的线段)、综合点、分支点构成的表示控制系统组成和作用的图形。
其中每一个分块代表系统中的一个组成部分,方块内填入表示其口身特性的数学表达式;方块间用带有箭头的线段表示相互间的关系及信号的流向。
采用方块图可直观地显示出系统中各组成部分以及它们Z间的相互影响和信号的联系,以便对系统特性进行分析和研究。
而工艺流程图则是以形象的图形、符号、代号,表示出工艺过程选用的化工设备、管路、附件和仪表H控等的排列及连接,借以表达在一个化工生产中物料和能量的变化过程,即原料一成品全过程小物料和能量发牛•的变化及其流向。
《过程装备控制技术及应用》(第二版)王毅、张早校化学工业出版社思考题与习题及参考答案第一章控制系统的基本概念1.什么叫生产过程自动化生产过程自动化主要包含了哪些内容答:利用自动化装置来管理生产过程的方法称为生产过程自动化。
主要包含:①自动检测系统②信号联锁系统③自动操纵系统④自动控制系统。
2.自动控制系统主要由哪几个环节组成自动控制系统常用的术语有哪些答:一个自动控制系统主要有两大部分组成:一部分是起控制作用的全套自动控制装置,包括测量仪表,变送器,控制仪表以及执行器等;另一部分是自动控制装置控制下的生产设备,即被控对象。
自动控制系统常用的术语有:被控变量y——被控对象内要求保持设定数值的工艺参数,即需要控制的工艺参数,如锅炉汽包的水位,反应温度;给定值(或设定值)y s——对应于生产过程中被控变量的期望值;测量值y m——由检测原件得到的被控变量的实际值;操纵变量(或控制变量)m——受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,是调节阀的输出信号;干扰f——引起被控变量偏离给定值的,除操纵变量以外的各种因素;偏差信号(e)——被控变量的实际值与给定值之差,即e=y m - y s控制信号u——控制器将偏差按一定规律计算得到的量。
3.什么是自动控制系统的方框图它与工艺流程图有什么不同答:自动控制系统的方框图上是由传递方块、信号线(带有箭头的线段)、综合点、分支点构成的表示控制系统组成和作用的图形。
其中每一个分块代表系统中的一个组成部分,方块内填入表示其自身特性的数学表达式;方块间用带有箭头的线段表示相互间的关系及信号的流向。
采用方块图可直观地显示出系统中各组成部分以及它们之间的相互影响和信号的联系,以便对系统特性进行分析和研究。
而工艺流程图则是以形象的图形、符号、代号,表示出工艺过程选用的化工设备、管路、附件和仪表自控等的排列及连接,借以表达在一个化工生产中物料和能量的变化过程,即原料→成品全过程中物料和能量发生的变化及其流向。
1. 过程装备的三項基本要求过程装备的三項基本娈求:安全性济忡和稳定忱.А.安全性:指格个生产过程中确保人身和a备的安全B.经济性:指在生产问忭侦识和数W 产品所消耗的能姑和哚材敊圾少.也就足耍求生产成本低而效率尚C. f3 记性:衔系统应兵有抵抗外瑯于扰.保持生产过程长期稔记运行的能力.2. 过程装备控制的主要参数:温沒、压力、流说、液位(或物位)、成分和物性筠.3. 流程工业四大参数:涡度、压力、流说、液位(成物位〉4. 控制系统的组成控制系统的组成:<1)被挖对象(2〉湖攮元件和变送雅⑶调节器(4>执行器5. 控制系统各参最及其作用:1.被控戈祕y指滞逛控刺的工艺参数,它足被控对象的输出倍号2.给定值(或没定值〉ys对应子生产过柺屮被拧变钻的期盟值3. 測量佰ym由检测元件得到的披控变世的实际值4.棟纵变ft (或控制变量>m受控于调节阀,用以兑服干扰影响,其休实现控«作用的变诏称力俠纵变尕,它足调节阀的输出倍亏5.千扰(或外界扰动)f引起被校变KfW离给定值的.除操纵变ffl以外的各种因H6.偏袪估号e在理论上应该足被挖变从的实际值与给定伍之差7.校制估兮u控利器将馅趋按一定规怵计笄捋詞的51.б.控制系统的分类(1>控咧系统的分类:按洽定伧a定馅控削系统:陆动挖釗系统:稈序控制系统<2>b c按输出佶号的影响a ffl坏控利:b开坏挖钊(3)按系统克吸乎忧的方式a反馈控制系统:b前馈控制系统:c前馏反馈控制系统7. 控制系统过度过枵定义:从被控对袋受到干抗作用使被控交:W偏离给定值时起,调节難开始发挥作用,使戏打e到给定值附近范围内.然而这•回复并不足瞬间完成的.而是荽经历-•个过程.这个过程就足控制系统的过渡过程.8. 阶跃+扰下过波过程的基木形式及其使用特点(1〉发收振谋过程:这足一祌不炫定的阶跃干扰卞过渡过柙的棋本形式及其使用特贞:过渡过相.w此要尽w 迢免(2)苕哝报荡过稅:被挖变狃在某敉定值附近振保.而报荡w度但定不变. 这意味矜系统在受到阶跃干扰作用后,就不能再稳定下來.一般不采用(3)Hit 振荡过稈:被控变噪在挖5ir馅附近上下波动,经过两三个岡期就祛定下來,这足一种稳记的过渡过稃(4>非抿荡的过渡过e: S—个稔记的过渡过稃.但与衮减抿荡扣比.其0SL鈎肀衡状态的速度攸.时间长.-•般不采用.9. 评价控制系统的性能指标(丨)以阶跃响应曲线形式农示的妩讯指标:A.Ai大侬茬A (或评价拽科系统的蚀陡拒标:超调峡0 > B.袞减比nC.过渡时间ts D.氽差eE.振荡岡期T <2>偏浚积分性能衔标:A.平方误差积分指标(ISE) B. 时1川染T方误差积分指标<ITSE) C.绝对误差积分指标(IAIi)梁绝对误差积分指杨(ITAE)10. 被控对象特性的定义被控对象特性的定义:我足当被授对泶的输入变14发生变化时.其输出变讯随时问的变化规诈(包拈变化的大小.速度等)。
1.过程控制系统可分为开环控制与闭环控制√2.控制系统中,当控制对象具有较大的纯滞后时,应使副环尽量少包含或不包含纯滞后√3.均匀控制指的是控制方案而不是控制功能×4.当生产过程中某一变量超过安全软限时,可用另一控制回路代替原有的控制回路√5.交流接触器铁芯使用硅钢片冲压而成,通常采用灭弧能力较强的磁吹灭弧装置×6.前馈控制按直接按干扰作用的大小进行控制,比反馈控制要及时。
7.前馈控制属于开环控制;开环控制,控制效果不能通过反馈验证,因此对控制器设计的要求比较严格。
8.前馈控制系统只能用来克服生产过程中主要的、可测不可控的扰动,而不能克服不可测的扰动。
9.前馈控制系统一般只能实现局部补偿而不能保证被调量的完全不变,一种前馈控制只能控制一种干扰。
10.前馈控制器是视对象特性而定的“专用”控制器;不象反馈控制通用PID算法,前馈控制算法依对象不同而不同。
11.串级控制系统具有单回路控制系统的全部功能。
〔√〕12.串级控制系统中干扰可单独作用于主环、副环,但不可同时作用于主环、副环。
〔×〕13.前馈控制比反馈控制及时,且属于闭环控制。
〔×〕14.分程控制系统是由一个控制器输出信号分段分别去控制两个或两个以上的控制阀动作的系统。
〔√〕15.矿井甲烷、爆炸性粉尘、易燃纤维是属于同一类爆炸性物质。
〔×〕16.锅炉中给水量不变,水位不变。
〔×〕17.锅炉设备的给水自动控制系统中被控变量是汽包液位,操作变量是给水量。
〔√〕18.精馏塔的压力增加,可提高混合液沸点,有利于减少冷量;压力降低,可降低混合液的沸点,可防止分解。
〔√〕19.控制阀的理想流量特性不需要考虑前后压差变化,取决于阀芯的形状。
〔√〕20.单一的气相或液相进料是,热焓与进料温度有单值对应关系,气液混合相进料,热焓与进料温度无单值对应关系或不明显。
〔√〕1 均匀控制指的是控制功能,而不是控制方案。
1. 过程装备的三项基本要求过程装备的三项基本要求:安全性、经济性和稳定性.A.安全性:指整个生产过程中确保人身和设备的安全B.经济性:指在生产同样质量和数量产品所消耗的能量和原材料最少,也就是要求生产成本低而效率高C.稳定性:指系统应具有抵抗外部干扰,保持生产过程长期稳定运行的能力.2. 过程装备控制的主要参数:温度、压力、流量、液位(或物位)、成分和物性等.3. 流程工业四大参数:温度、压力、流量、液位(或物位)4. 控制系统的组成控制系统的组成:(1)被控对象 (2)测量元件和变送器 (3)调节器 (4)执行器5. 控制系统各参量及其作用:1.被控变量 y 指需要控制的工艺参数,它是被控对象的输出信号 2.给定值(或设定值) ys 对应于生产过程中被控变量的期望值 3.测量值 ym 由检测元件得到的被控变量的实际值 4.操纵变量(或控制变量)m 受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,它是调节阀的输出信号5.干扰(或外界扰动)f 引起被控变量偏离给定值的,除操纵变量以外的各种因素6.偏差信号 e 在理论上应该是被控变量的实际值与给定值之差7.控制信号u 控制器将偏差按一定规律计算得到的量。
6. 控制系统的分类(1)控制系统的分类:按给定值 a 定值控制系统;随动控制系统;程序控制系统(2) b c 按输出信号的影响 a 闭环控制;b 开环控制(3)按系统克服干扰的方式 a 反馈控制系统;b 前馈控制系统;c 前馈-反馈控制系统7. 控制系统过度过程定义:从被控对象受到干扰作用使被控变量偏离给定值时起,调节器开始发挥作用,使被控变量回复到给定值附近范围内,然而这一回复并不是瞬间完成的,而是要经历一个过程,这个过程就是控制系统的过渡过程。
8. 阶跃干扰下过渡过程的基本形式及其使用特点(1)发散振荡过程:这是一种不稳定的阶跃干扰下过渡过程的基本形式及其使用特点:过渡过程,因此要尽量避免(2)等幅振荡过程:被控变量在某稳定值附近振荡,而振荡幅度恒定不变,这意味着系统在受到阶跃干扰作用后,就不能再稳定下来,一般不采用(3)衰减振荡过程:被控变量在稳定值附近上下波动,经过两三个周期就稳定下来,这是一种稳定的过渡过程(4)非振荡的过渡过程:是一个稳定的过渡过程,但与衰减振荡相比,其回复到平衡状态的速度慢,时间长,一般不采用。
9. 评价控制系统的性能指标(1)以阶跃响应曲线形式表示的质量指标: A.最大偏差 A(或评价控制系统的性能指标:超调量σ) B.衰减比 n C. 过渡时间 ts D.余差 e E.振荡周期 T (2)偏差积分性能指标: A.平方误差积分指标(ISE) B.时间乘平方误差积分指标(ITSE)C.绝对误差积分指标(IAE) D.时间乘绝对误差积分指标(ITAE)10. 被控对象特性的定义被控对象特性的定义:就是当被控对象的输入变量发生变化时,其输出变量随时间的变化规律(包括变化的大小,速度等)。
11. 连续生产过程所遵守的两个最基本的关系:物料平衡和能量平衡。
即静态条件下,单位时间流入对象的物料(或能量)等于从系统中流出的物料(或能量);动态条件下,单位时间流入对象的物料(或能量)与从系统中流出的物料(或能量)之差等于系统内物料(或能量)存储量的变化率。
12. 有自衡作用和无自衡作用单容液位对象的区别有自衡作用和无自衡作用单容液位对象的区别:A.自衡特性有利于控制,在某些情况下,使用简单的控制系统就能得到良好的控制质量,甚至有时可以不用设置控制系统。
B.无自衡特性被控对象在受到扰动作用后不能重新恢复平衡,因此控制要求较高。
对这类被控对象除必须施加控制外,还常常设有自动报警系统。
13. 一阶被控对象一阶被控对象:它是一个一阶常系数微分方程,具有该特性的被控对象叫一阶被控对象.14. 描述被控对象特性的参数及其对对象控制质量的影响(1)放大系数 K 对控制通道,K 描述被控对象特性的参数及其对对象控制质量的影响:值大,控制灵敏,但被控变量不易控制,系统不稳定;对干扰通道,K 值越小,相同干扰产生的作用越小,利于控制。
(2)时间常数 T 不同通道,时间常数对系统的影响:对控制通道,若时间常数 T 大,则被控变量的变化比较缓和,一般来讲,这种对象比较稳定,容易控制,但缺点是控制过于缓慢;若时间常数 T 小,则被控变量的速度变化快,不易控制。
因此,时间常数太大或太小,对过程控制都不利;对干扰通道,时间常数大有明显的好处,使干扰对系统的影响变得比较缓和,被控变量的变化平稳,对象容易控制。
(3)滞后时间不同通道、不同滞后对控制性能的影响:对控制通道,滞后的存在不利于控制;对于干扰通道,作用不一,纯滞后是只是推迟了干扰作用的时间,因此对控制质量没有影响;容量滞后则可以缓和干扰对被控对象的影响,因而对控制系统是有利的。
15. 单回路控制系统参数选择的原则(1)被控变量的选择基本原则;被控变量信号最好是单回路控制系统参数选择的原则:能够直接测量获得,并且测量和变送环节的滞后也要比较小。
若被控变量信号无法直接获取,可选择与之有单值函数关系的间接参数作为被控变量。
被控变量必须是独立变量。
变量的数目一般可以用物理化学中的相律关系来确定。
被控变量必须考虑工艺合理性,以及目前仪表的现状能否满足要求。
(2)操纵变量的选择;使被控对象控制通道的放大系数较大,时间常数较小,纯滞后时间越小越好;使被控对象干扰通道的放大系数尽可能小,时间常数越大越好。
(3)检测变送环节:检测变送环节在控制系统中起着获取信息和传送信息的作用。
①减小纯滞后的方法,正确选择安装检测点位置,使检测元件不要安装在死角或容易结焦的地方。
当纯滞后时间太大时,就必须考虑使用复杂控制方案。
②克服测量滞后的方法,一是对测量元件时间常数进行限定。
尽量选用快速测量元件,以测量元件的时间常数为被控对象的时间常数的十分之一以下为宜;二是在测量元件后引入微分环节,达到超前补偿。
在调节器中加入微分控制作用,使调节器在偏差产生的初期,根据偏差的变化趋势发出相应的控制信号。
③减小信号传递滞后的方法,尽量缩短气压信号管线长度,一般不超过 300m;较长距离的传输尽量转换成电信号;在气压管线上加气动继电器,以增大输出功率;按实际情况尽量采用基地式仪表等。
16. 基本调节规律:A.断续调节:位式;B.连续调节:比例、积分、微分。
17. PID 调节器的参数整定:整定内容;调节器的比例度δ,积分时间 T1 和微分时间 TD。
整定方法;①经验试凑法,②临界比例度法,③衰减曲线法。
18. 复杂控制系统的分类分类:①为提高响应曲线的性能指标而开发的控制系统;②为某些特殊目的而开发的控制系统。
19. 串级控制系统的工作原理:串级控制系统由两套检测变送器,两个调节器,两个被控对象和一个调节阀组成,其中两个调节器串联起来工作,前一个调节器的输出作为后一个调节器的给定值,后一个调节器的输出才送往调节阀。
串级控制系统与简单控制系统有一个显著的区别,它在结构上形成了两个闭环,一个闭环在里面,成为副环或副回路,在控制过程中起着“初调”的作用,一个闭环在外面,称为主环或主回路,用来完成“细调”任务,以保证被控变量满足工艺要求。
20. 串级控制系统的工作特点控制系统的工作特点:①能迅速克服进入副回路的干扰②能改善被控变量的特性,提高系统克服干扰的能力③主回路对副对象具有“鲁棒性”,提高了系统的控制精度。
21. 串级控制系统的适用对象:凡是可以利用上述特点之一来提高系统的控制品质的场合,都可以采用串级控制系统,特别是在被控对象的容量滞后大,干扰强,要求高的场合,采用串级控制可以获得明显的效果。
22. 主副回路的选择依据主副回路的选择依据:让主要干扰位于副回路。
23. 前馈控制相较于反馈控制的特点:在反馈控制中,信号的传递形成了一个闭环系统,而在前馈控制中,则只有一个开环系统,闭环系统存在一个稳定性的问题,调节器参数的整定首先要考虑这个稳定性问题,但是,对于开环控制系统来讲,这个稳定性问题是不存在的,补偿的设计主要是考虑如何获得最好的补偿效果。
在理想情况下,可以把补偿器设计到完全补偿的目的,即在所考虑的扰动作用下,被控变量始终保持不变,或者说兑现了“不变性”原理。
24. 前馈-反馈控制系统:在工程上往往将前馈与反馈结合起来应用,既发挥了前馈校正作用及时的优点,又保持了反馈控制能克服多种扰动及对被控变量最终检验的长处,是一种适合化工过程控制的控制方法。
25. 系统误差:指在相同条件下,多次测量同一被测量值的过程中出现的一种误差,它的绝对值和符号或者保持不变,或者在条件变化时按某一规律变化。
26. 随机误差:又称偶然误差,它是在相同条件下多次测量同一被测量值的过程中所出现的绝对值和符号以不可预计的方式变化的误差。
27. 粗大误差:明显的歪曲测量结果的误差称为粗大误差,这种误差时由于测量操作者的粗心,不正确的操作,实验条件的突变或实验状况尚未达到预想的要求而匆忙实验等原因所造成的。
28. 减小误差的方法:①标准法:预先测出系统误差,然后对测量值进行修正。
由于修正值本身存在一定误差,因此这种方法只适用于工程测量,②零示法:测量误差与读数误差无关,主要取决于已知的标准量,但要求指示器灵敏度足够高,如电位差计(平衡式电桥)。
③代替法:用已知量来代替被测量的测量方法。
④交换法:将引起系统误差的某些条件相互交换以达到减小或消除误差的方法。
(例如等臂天平称量物体时),此外还有对称法、微差法、比较法等。
29. 仪表的绝对误差:仪表指示值与被测变量真值之间的代数差.30. 仪表的相对误差:测量的绝对误差与被测变量的约定真值(实际值)之比.31. 仪表的引用误差:绝对误差与仪表的量程之比.32. 仪表的精度等级:工业自动化仪表通常根据引用误差来评定其精确度等级,并规定用允许引用误差限去掉百分号后的数字来表示精度等级。
如精度等级为 1.0 级的仪表其允许引用误差为 1.0%。
精密等级值越低的仪表其精确度越高。
33. 流量的概念:流量是指单位时间内流过某一截面的流体数量的多少。
34. 流量计的分类:A 压差式流量计,B 转子式流量计、C 电磁式流量计35. 压差式流量计的工作原理:当充满管道的流体流经节流装置时,流束收缩,流速提高,静压减小,在节流装置前后会产生了一定的压差。
这个压差的大小与流量有关,根据它们之间的关系即可得到流量的大小。
36. 压差式流量计结构上的核心部件:核心部件是节流装置,包括节流元件,取压装置以及其前后管段。
37. 常见的节流装置分类:孔板,喷嘴,文都利管.38. 液位的概念:液位是指液体介质液面的高低。
39. 液位计的分类:按工作原理可分为直读式、浮力式、静压式、电容式、光纤式、激光式、核辐射式。