航海学 第二章 第2节 海上方向的测定分解
- 格式:ppt
- 大小:446.50 KB
- 文档页数:31
第一节航向与方位一、方向的确定、划分与换算1. 航海上方向的划分航海上常用的划分方向的方法有下列三种:(1)圆周法以正北为方向基准000°,按顺时针方向计量到正东为090°,正南为180°,正西为270°,再计量到正北方向为360°或000°。
圆周法始终用三位数表示,是航海上最常用的表示方向的方法。
(2)半圆法以正北或正南为方向基准,分别向东或向西计量到正南或正东,计量范围0°到180°。
用半圆法表示某方向时,除度数外,还应标明起算点和计量方向。
如:30°NE,150°SE,30°SW,150°NW。
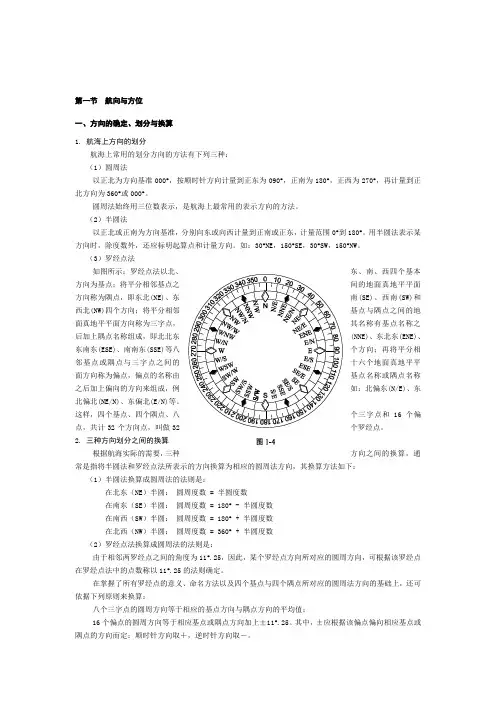
(3)罗经点法如图所示:罗经点法以北、东、南、西四个基本Array方向为基点;将平分相邻基点之间的地面真地平平面方向称为隅点,即东北(NE)、东南(SE)、西南(SW)和西北(NW)四个方向;将平分相邻基点与隅点之间的地面真地平平面方向称为三字点,其名称有基点名称之后加上隅点名称组成,即北北东(NNE)、东北东(ENE)、东南东(ESE)、南南东(SSE)等八个方向;再将平分相邻基点或隅点与三字点之间的十六个地面真地平平面方向称为偏点,偏点的名称由基点名称或隅点名称之后加上偏向的方向来组成,例如:北偏东(N/E)、东北偏北(NE/N)、东偏北(E/N)等。
这样,四个基点、四个隅点、八个三字点和16个偏点,共计32个方向点,叫做32个罗经点。
2. 三种方向划分之间的换算根据航海实际的需要,三种方向之间的换算,通常是指将半圆法和罗经点法所表示的方向换算为相应的圆周法方向,其换算方法如下:(1)半圆法换算成圆周法的法则是:在北东(NE)半圆:圆周度数 = 半圆度数在南东(SE)半圆:圆周度数 = 180° - 半圆度数在南西(SW)半圆:圆周度数 = 180° + 半圆度数在北西(NW)半圆:圆周度数 = 360° + 半圆度数(2)罗经点法换算成圆周法的法则是:由于相邻两罗经点之间的角度为11°.25,因此,某个罗经点方向所对应的圆周方向,可根据该罗经点在罗经点法中的点数称以11°.25的法则确定。
第二篇航迹推算和陆标定位第一章航迹推算船舶在航行中确定船位的方法,按照取得船位所采取的手段不同,通常可以分为两大类:航迹推算(dead reckoning)和观测定位。
航迹推算包括航迹绘算(track plotting)和航迹计算(track calculating)两种。
航迹绘算简单直观,是目前常用的一种方法;航迹计算可作为对航迹绘算不足的一种补充,也有利于实现驾驶自动化。
观测定位包括陆标定位、天文定位和无线电定位(俗称“电子定位”)。
航迹推算是指驾驶员根据罗经和计程仪所提供的航向航程,结合海区内的风流资料,在不借助外界物标和航标的情况下,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法;或者根据海图上的计划航线,预配风流压差,作图求出应执行的真航向,最后转换成罗经航向落实实施。
航迹推算是驾驶员在任何时候、任何情况下获取船位的最基本的方法;它可以使驾驶员清晰地了解船舶在海上运动的连续航迹,从而了解船舶继续航行的前方是否存在危险;它又是陆标定位、天文定位和电子定位的基础,它的精度还会直接影响到陆标船位、天文船位和电子船位的精度。
航迹推算工作应该在船驶出引航水域或港界、定速航行后立即开始。
推算起始点必须是准确的观测船位。
准确的起始点可以采用过港界(门)时的船位或离锚地时的锚位或利用港内附近的显著物标进行定位后的船位。
在整个航行过程中航迹推算工作应该是连续不断的,不得无故中断,直到驶抵目的地或领航水域或接近港界有物标可供导航时,方可终止。
但当船驶经险要航区,如渔区、狭水道,由于机动操纵频繁,可暂时中止,驶过后应立即恢复。
航迹推算的起始点、终止点应载入航海日志,途中的中止点和复始点应在海图上画出并记入航海日志。
航迹推算工作,在沿岸水流影响显著的航区应该每小时进行一次,在其他航区应该每2~4小时进行一次。
第一节航迹绘算工具及其用法一、航迹绘算工具1.航海三角板以34厘米的尺寸为宜。
可用来在海图上平移直线、画线、量取航向和方位。
第一篇航海学地文航海航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显著的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。