弹性力学及有限元讲义-研究生(有限元部分
- 格式:pdf
- 大小:3.99 MB
- 文档页数:139
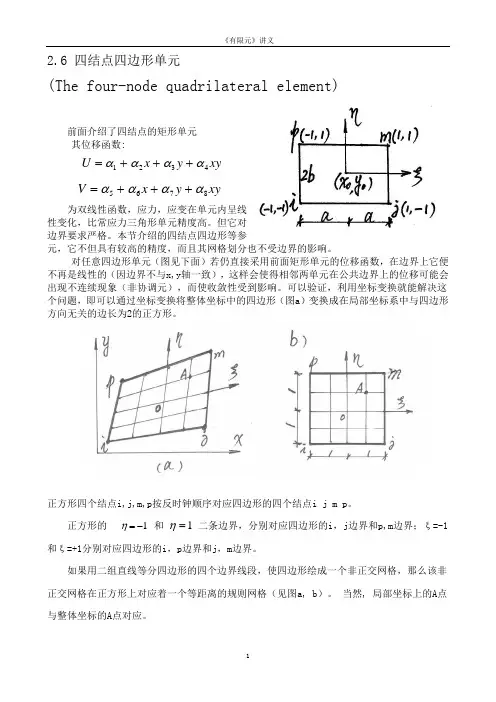
2.6 四结点四边形单元(The four-node quadrilateral element)前面介绍了四结点的矩形单元其位移函数:xy y x U 4321αααα+++=xy y x V8765αααα+++=为双线性函数,应力,应变在单元内呈线性变化,比常应力三角形单元精度高。
但它对边界要求严格。
本节介绍的四结点四边形等参元,它不但具有较高的精度,而且其网格划分也不受边界的影响。
对任意四边形单元(图见下面)若仍直接采用前面矩形单元的位移函数,在边界上它便不再是线性的(因边界不与x,y 轴一致),这样会使得相邻两单元在公共边界上的位移可能会出现不连续现象(非协调元),而使收敛性受到影响。
可以验证,利用坐标变换就能解决这个问题,即可以通过坐标变换将整体坐标中的四边形(图a )变换成在局部坐标系中与四边形方向无关的边长为2的正方形。
正方形四个结点i,j,m,p 按反时钟顺序对应四边形的四个结点i j m p 。
正方形的 1-=η 和 1=η 二条边界,分别对应四边形的i ,j 边界和p,m 边界;ξ=-1和ξ=+1分别对应四边形的i ,p 边界和j ,m 边界。
如果用二组直线等分四边形的四个边界线段,使四边形绘成一个非正交网格,那么该非正交网格在正方形上对应着一个等距离的规则网格(见图a, b )。
当然, 局部坐标上的A 点与整体坐标的A 点对应。
一、四结点四边形等参单元的形函数及坐标变换由于可以将整体坐标下的四边形单元变换成局部坐标下的正方形单元,对于这种正方形单元,自然仍取形函数为: ξηαηαξαα2321+++=U ξηαηαξαα8765+++=V引入边界条件,即可得位移函数:∑=ijmpi i U N Ui ijmpi V N V ∑==写成矩阵形式:{}{}[]{}ee p i p i ed N d N N N N V U f =⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧=000 式中形函数: ()()()ηηξξηξi i i N ++=1141, ()p m j i ,,, 按照等参元的定义,我们将坐标变换式亦取为: p p m m j j i i i ijmpi x N x N x N x N x N x +++==∑p p m m j j i i i ijmpi y N y N y N y N y N y +++==∑ ()162-- 式中形函数N 与位移函数中的完全一致。

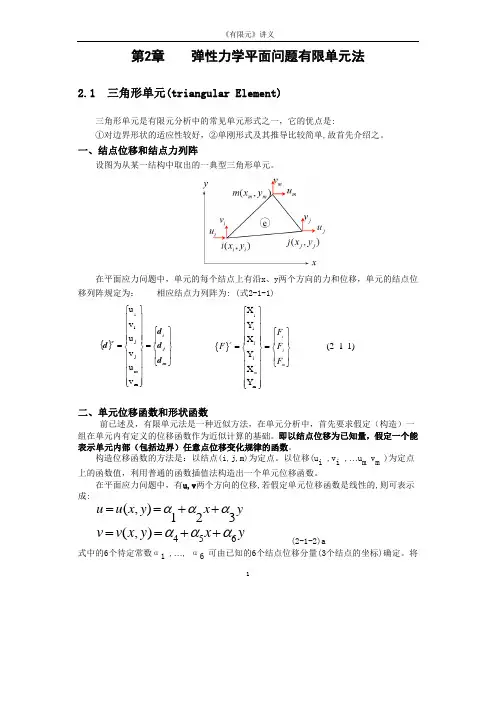
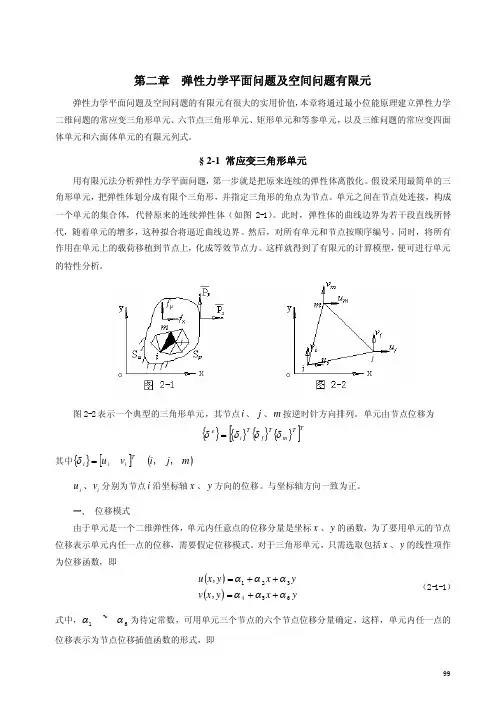
第2章 弹性力学平面问题有限单元法2.1 三角形单元(triangular Element)三角形单元是有限元分析中的常见单元形式之一,它的优点是:①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。
一、结点位移和结点力列阵设图为从某一结构中取出的一典型三角形单元。
在平面应力问题中,单元的每个结点上有沿x、y两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1){}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=m j i m ed d d d m j j i v u v u v u i {}ii j j m X Y X (2-1-1)Y X Y iej m m F F F F ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪==⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎪⎪⎩⎭二、单元位移函数和形状函数前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构造)一组在单元内有定义的位移函数作为近似计算的基础。
即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。
构造位移函数的方法是:以结点(i,j,m)为定点。
以位移(u i ,v i ,…u m v m 3)为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。
在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成:(,)12u u x y x yααα+46y ==+ 5(,)v v x y x ααα+==+ (2-1-2)a式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标)确定。
将13个结点坐标(x i,3iy y i ),(x j,y j ),(x m,y m )代入上式得如下两组线性方程: 12i i u x ααα+3=+12j j j x y u αα=+α+3m y (a)12m m u x ααα=++46i y和5i i v x αα=+α+465j j j x y v αα=+α+46m y (b)5m m v x ααα=++利用线性代数中解方程组的克来姆法则,由(a)可解出待定常数1α 、2α 、3α :211A Aα=22A 3A Aα=3Aα=式中行列式:2111i i 1i i i j m j j m m u x y A u x y u x y =j jm mu y A u y u y =3111i i j jm mx u A 2111i i j j m mAx y A x y x y x u x u ===A为△ijm 的面积,只要A不为0,则可由上式解出:112i i j j a u a u ()m m a u A α=++21(2i ij j bu b u )m m b u A α=++ (C)312i i j j c u c u ()m mc u A α=++i j a x y =−j i y x y =−m i j j i y x y 式中:m m j x y a x a x m m i =−y m y y =−m i j y ym i j b y =− b b j i =− (d)3c m i j x x =− j i c m x x =−m j i c x x =−m iy x y =−m为了书写方便,可将上式记为: a xm i j b i jy y =−(,,) i u j m uu u ruuu u r i jc m x x =−(,,)i j m uuu u r uuu u r)m m N x y u N x y u N x y u =++)m x y v 表示按顺序调换下标,即代表采用i,j,m 作轮换的方式便可得到(d)式。
第一讲概述0 引言各力学学科分支的关系科学研究的目的:定量获取所研究对象的所有信息确定对象定义参量或变量获得定量关系推广到该类问题的所有情形-4-中北大学研究生精品课程第一讲概述有限元法的思路及发展过程思路以计算机为工具,分析任意变形体以获得所有力学信息,并使得该方法能够普及、简单、高效、方便,一般人员可以使用。
-6-有限元法的思路及发展过程几位有限元方法的创始人Richard Courant第一讲概述¾Richard Courant Richard Courant (美国数学家,1888.01.08-1972.01.27,出生地:德国Lublinitz),1910 年在哥廷根大学获得博士学位,1928 年创办了应用数学研究所,并在1928~1933 年担任所长,开始应用数学的研究,1936 年去纽约大学创立了数学研究所,1964 年该研究所被命名为Courant数学科学研究所,出版了数学物理方法教科书,成为最有影响的书籍之一,还出版了科普读物“什么,成为最有影响的书籍之一,还出版了科普读物“什么有限元法的思路及发展过程几位有限元方法的创始人John Argyris第一讲概述¾John Argyris John Argyris(德国人,1913.08.19-2004.04.02,出生地:希腊Volos)是公认的计算科学、航空航天、流体力学领域的杰出专家,被誉为有限元分析的发明人和创始者之一,所创立的力学分析的矩阵位移方法为有限元方法的前身,被称为世界上最先进的数学工具,先后因在有限元方法以及混沌理论方面的贡献而获得菲利普王子奖章、美国最高荣誉的爱因斯坦奖,获得包括5个G8、美国最高荣誉的爱因斯坦奖,获得包括5 个G8 有限元法的思路及发展过程几位有限元方法的创始人Cecil Zienkiewiz第一讲概述¾Olgierd Cecil Zienkiewiz Olgierd Cecil Zienkiewiz (英国人,1921.05.18-,出生地:英国Caterham)。
英国Swansea大学的荣誉退休教授,是该校工程数值方法研究所的原主任,现在仍然是西班牙巴塞罗那Calalunya技术大学工程数值方法的UNESCO主席。
从1961 至1989 年,担任Swansea大学土木工程系的主任,使该系成为有限元研究的重要中心之一。
在1968 年,创办了International Journal forNumerical Methods in Engineering杂志并任主编,该杂志至今仍然是该领域的主要刊物。
他被授予24 个荣誉学位和多种奖励。
Zienkiewiez教授还是5 所第一讲概述北京奥运场馆鸟巢的钢铁枝蔓结构-16-中北大学研究生精品课程第一讲概述列车车厢整体结构的有限元模型-17-中北大学研究生精品课程第一讲概述空客A350后机身第19框的设计与有限元分析过程-18-中北大学研究生精品课程第一讲概述人体肩部区有域的骨胳限元分析模型及计算结果-19-中北大学研究生精品课程机械安全气囊计算有限元应用实例第一讲概述-27-中北大学研究生精品课程接触问题有限元应用实例第一讲概述-28-中北大学研究生精品课程机械碰撞有限元应用实例第一讲概述-29-中北大学研究生精品课程流体力学有限元应用实例第一讲概述-30-中北大学研究生精品课程-31-中北大学研究生精品课程变量定义-34-中北大学研究生精品课程τxy中北大学研究生精品课程部分力做的功。
-44-中北大学研究生精品课程x x 则可得微体上的变形能为:整个变形体Ω上σx 与εx 所产生的变形能为:-46-中北大学研究生精品课程则由τxy与γxy作用,在微体上产生的能量为:整个变形体Ω上τxy与γxy所产生的变形能为:-47-中北大学研究生精品课程第二讲有限元分析的数学基础2.3 弹性问题的求解方法(1)1D问题的直接求解由于该问题是沿x方向的一维问题,因此只有沿x方向的基本变量。
{基本变量{ 三大方程-50-中北大学研究生精品课程第二讲有限元分析的数学基础2.3 弹性问题的求解方法(1)1D 问题的直接求解位移边界条件BC(u )力边界条件BC(p )=l 对于以上的力边界条件,只能作为一种近似,因为在x = l 第二讲有限元分析的数学基础2.3 弹性问题的求解方法(1)1D 问题的直接求解对方程进行直接求解,可得到以下结果 由边界条件可求出其中待定常数{{-52-中北大学研究生精品课程第二讲有限元分析的数学基础2.3 弹性问题的求解方法(2)1D问题的虚功原理求解由于虚功总和为零,则有:弹性力学中的虚功原理可表述为,在外力作用下处于平衡状态的变形体,当给物体以微小虚位移时,外力所做的总虚功等于物体的总虚应变能(即应力在由虚位移所产生虚应)。
变上所作的功)。
第二讲有限元分析的数学基础2.3 弹性问题的求解方法(2)1D问题的虚功原理求解设有满足位移边界条件的位移场:可以验证:它满足位移边界条件。
这是一个待定函数,也称为试函数。
待定系数确定方法:由虚功原理来进行确认。
由虚功原理消去δ c-56-及外力虚功分别为:该1D问题的势能(potential energy)为:-57-中北大学研究生精品课程第二讲有限元分析的数学基础2.3 弹性问题的求解方法(3)1D问题的最小势能原理求解取的满足位移边界条件的位移场,则计算应力、应变为:该系统的势能为,即对其求极值,即则可以求出相同的结果-58-中北大学研究生精品课程一组满足所有边界条件的试函数,其线性组合为:其中为权函数取为得到关于第二讲有限元分析的数学基础2.3 弹性问题的求解方法(6)各种求解方法的比较-64-中北大学研究生精品课程第二讲有限元分析的数学基础2.3 弹性问题的求解方法(6)各种求解方法的比较-65-中北大学研究生精品课程一个阶梯杆结构,已知相应的弹性模量和结构尺寸如图所示-70-中北大学研究生精品课程“特征结构”抽象为具有两个节点的单元,下面考察该问题的FEA求解过程-71-中北大学研究生精品课程两个杆单元,即单元①和单元②(2)单元的特征及表达对于二节点的杆单元,设该单元的位移场为u e(x),则两个节点条件为-72-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.1 简单杆结构FEA求解过程设单元的位移场模式为(考虑两个待定系数): 利用两个节点条件可确定两个待定系数单元的位移场为:其中-74-中北大学研究生精品课程该单元的势能:第三讲杆梁结构的有限元分析原理3.1 简单杆结构FEA 求解过程其中单元刚度矩阵单元节点外载-75-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.1 简单杆结构FEA 求解过程节点位移向量:单元①刚度矩阵:节点外载:单元②节点位移向量:刚度矩阵:节点外载:-76-中北大学研究生精品课程-77-中北大学研究生精品课程边界条件为左端固定,即u 1=0应用最小势能原理(对未知位移u 2、u 3求一阶导):解得:-78-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.1 简单杆结构FEA求解过程(5)计算单元应变计应力由几何方程-79-中北大学研究生精品课程如果在处理位移边界条件之前,先对总势能取极值,有:(BC),及令u=0考虑位移边界条件(第三讲杆梁结构的有限元分析原理3.2 有限元分析的基本步骤及表达式根据阶梯杆分析实例,可总结FEA基本思路-82-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.2 有限元分析的基本步骤及表达式(1)弹性体几何的离散化为具有特征的单元(2)单元特性研究所有力学信息都用节点位移来表达¾单元节点描述¾单元位移(场)模式ξ为几何位置坐标-83-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.2 有限元分析的基本步骤及表达式(2)单元特性研究¾所有物理量的表达所有力学量都用节点位移表达其中第三讲杆梁结构的有限元分析原理3.2 有限元分析的基本步骤及表达式(3)装配集成¾整体平衡关系其中(4)BC 处理及节点位移求解目的:获得满足位移边界条件的许可位移场其中q u 为未知节点位移,q k 为已知节点位移P u 为未知节点力,P k 为已知节点力-85-中北大学研究生精品课程写成两个方程-86-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.2 有限元分析的基本步骤及表达式(5)求支反力求出后未知节点位移qu可求出未知节点力6)其它力学量的计算(6)其它力学量的计算可计算单元和整体的应变和应力-87-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述节点位移向量qe节点力向量Pe第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述¾单元位移场表达单元形状函数矩阵-89-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述¾单元应变场表达-90-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述¾单元应力场表达第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述¾单元势能表达-92-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(1)局部坐标系中的单元描述将单元势能表达式对待定位移向量取一阶极小¾单元刚度方程•力的平衡方程•力的边界条件物理含义:该单元力的平衡关系最小势能原理的性质:系统势能最小-93-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(2)平面问题中杆单元的坐标变换¾局部坐标系节点位移¾整体坐标系节点位移等价变换关系-94-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(2)平面问题中杆单元的坐标变换定义变换矩阵T e-95-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(2)平面问题中杆单元的坐标变换定义变换矩阵T e其中:-96-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(3)空间问题中杆单元的坐标变换¾局部坐标系节点位移¾整体坐标系节点位移变换关系-97-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.3 杆单元及坐标变换(3)空间问题中杆单元的坐标变换变换矩阵T e刚度矩阵和节点力的变换与平面情形相同刚度方程自编杆单元分析MATLAB程序(1D、2D、3D)-98-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.4 梁单元及其坐标变换(1)局部坐标系中的纯弯梁单元节点位移向量qe节点力向量Pe-99-中北大学研究生精品课程第三讲杆梁结构的有限元分析原理3.4 梁单元及其坐标变换(1)局部坐标系中的纯弯梁单元¾单元位移场表达边界条件待定系数-100-中北大学研究生精品课程。