第八讲网格划分技术
- 格式:ppt
- 大小:1.55 MB
- 文档页数:68
网格划分的几种基本处理方法学习2010-01-10 17:13:52 阅读48 评论0 字号:大中小贴体坐标法:贴体坐标是利用曲线坐标,并使其坐标线与燃烧室外形或复杂计算区域边界重合,这样所有边界点能够用网格点来表示,不需要任何插值。
一旦贴体坐标生成通过变换,偏微分方程求解可以不在任意形状的物理平面上,而在矩形或矩形的组合(空间问题求解域为长方体或它们的组合)转换平面上进行。
这样计算与燃烧室外形无关,也与在物理平面上网格间隔无关。
而是把边界条件复杂的问题转换成一个边界条件简单的问题;这样不仅可避免因燃烧室外形与坐标网格线不一致带来计算误差,而且还可节省计算时间和内存,使流场计算较准确,同时方便求解,较好地解决了复杂形状流动区域的计算,在工程上比较广泛应用。
区域法:虽然贴体坐标系可以使坐标线与燃烧室外形相重合,从而解决复杂流动区域计算问题。
但有时实际流场是一个复杂的多通道区域,很难用一种网格来模拟,生成单域贴体网格,即使生成了也不能保证网格质量,影响流场数值求解的效果。
因此,目前常采用区域法或分区网格,其基本思想是,根据外形特点把复杂的物理域或复杂拓扑结构的网格,分成若干个区域,分别对每个子区域生成拓扑结构简单的网格。
由这些子区域组合而成的网格,或结构块网格。
对区域进行分区时,若相邻两个子域分离边界是协调对接,称为对接网格;若相邻两子域有相互重叠部分,则此分区网格称为重叠网格。
根据实际数值模拟计算的需要,把整个区域(燃烧室)分成几个不同的子区域,并分别生成网格。
这样不仅可提高计算精度,而且还可节省计算机内存,提高收敛精度。
但是计算时,必须考虑各区域连接边界处耦合以及变量信息及时、准确地传递问题。
处理各个区域连接有多种方法,其中一个办法是在求解各变量时各区域可以单独求解若干次而对压力校正方程.设压力校正值在最初迭代时为零,为了保证流量连续各个区域应同时求解,然后对各个速度和压力进行校正。
或者采用在两个区域交界处有一个重叠区,两个区域都对重叠区进行计算,重叠区一边区域内的值,要供重叠区另一边区域求解时用。
![[转载]ABAQUS中网格划分技术_青草娃娃_新浪博客](https://uimg.taocdn.com/aa286410a76e58fafab003db.webp)
ABAQUS中网格划分技术作者:lengmenshi划分网格是有限元模型的一个重要环节,它要求考虑的问题较多,工作量较大,所划分的网格形式由于划分者的水平和思路不同而有很大的差异,因而对计算精度和计算规模会产生显著的影响。
有限元网格数量的多少和质量的好坏直接影响到计算结果的精度和计算规模的大小。
一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应该权衡这两个参数。
网格较少时增加网格数量可以显著提高计算精度,而计算时间不会有很大的增加。
所以应注意增加网格数量后的经济性。
实际应用时可以比较疏密两种网格划分的计算结果,如果两种计算结果相差较大,应该继续增加网格,重新计算,直到误差在允许的范围之内。
ABAQUS中的网格划分方法应该是所有通用有限元分析软件中最强大的。
本文将对其网格划分做较全面的叙述。
首先介绍一下网格划分技术,包括:结构化网格、扫掠网格、自由网格:1)结构化网格技术(STRUCTURED):将一些标准的网格模式应用于一些形状简单的几何区域,采用结构化网格的区域会显示为绿色(不同的网格划分技术会对相应的划分区域显示特有的颜色标示)。
2)扫掠网格技术(SWEEP):对于二维区域,首先在边上生成网格,然后沿着扫掠路径拉伸,得到二维网格;对于三维区域,首先在面上生成网格,然后沿扫掠路径拉伸,得到三维网格。
采用扫掠网格的区域显示为黄色。
3)自由网格划分技术(FREE):自由网格是最为灵活的网格划分技术,几乎可以用于任何几何形状。
采用自由网格的区域显示为粉红色。
自由网格采用三角形单元(二维模型)和四面体单元(三维模型),一般应选择带内部节点的二次单元来保证精度。
4)不能划分网格:如果某个区域显示为橙色,表明无法使用目前赋予它的网格划分技术来生成网格。
这种情况多出现在模型结构非常复杂的时候,这时候需要把复杂区域分割成几个形状简单的区域,然后在划分结构化网格或扫掠网格。
第3章网格划分技术及技巧-图文创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三个步骤:⑴定义单元属性单元属性包括单元类型、实常数、材料特性、单元坐标系和截面号等。
⑵定义网格控制选项★对几何图素边界划分网格的大小和数目进行设置;★没有固定的网格密度可供参考;★可通过评估结果来评价网格的密度是否合理。
⑶生成网格★执行网格划分,生成有限元模型;★可清除已经生成的网格并重新划分;★局部进行细化。
3.1定义单元属性3.1.1单元类型1.定义单元类型命令:ET,ITYPE,Ename,KOP1,KOP2,KOP3,KOP4,KOP5,KOP6,INOPRITYPE---用户定义的单元类型的参考号。
KOP1~KOP6---单元描述选项,此值在单元库中有明确的定义,可参考单元手册。
也可通过命令KEYOPT进行设置。
INOPR---如果此值为1则不输出该类单元的所有结果。
例如:et,1,link8!定义LINK8单元,其参考号为1;也可用ET,1,8定义et,3,beam4!定义BEAM4单元,其参考号为3;也可用ET,3,4定义2.单元类型的KEYOPT命令:KEYOPT,ITYPE,KNUM,VALUEITYPE---由ET命令定义的单元类型参考号。
KNUM---要定义的KEYOPT顺序号。
VALUE---KEYOPT值。
该命令可在定义单元类型后,分别设置各类单元的KEYOPT参数。
例如:et,1,beam4!定义BEAM4单元的参考号为1et,3,beam189!定义BEAM189单元的参考号为3keyopt,1,2,1!BEAM4单元考虑应力刚度时关闭一致切线刚度矩阵keyopt,3,1,1!考虑BEAM189的第7个自由度,即翘曲自由度!当然这些参数也可在ET命令中一并定义,如上述四条命令与下列两条命令等效:et,1,beam4,,1et,3,beam189,13.自由度集命令:DOF,Lab1,Lab2,Lab3,Lab4,Lab5,Lab6,Lab7,Lab8,Lab9,Lab104.改变单元类型命令:ETCHG,Cnv5.单元类型的删除与列表删除命令:ETDELE,ITYP1,ITYP2,INC列表命令:ETLIST,ITYP1,ITYP2,INC3.1.2实常数1.定义实常数命令:R,NSET,R1,R2,R3,R4,R5,R6续:RMORE,R7,R8,R9,R10,R11,R12NSET---实常数组号(任意),如果与既有组号相同,则覆盖既有组号定义的实常数。
有限元法——原理、建模及应用第二次讨论课关于网格划分方法问题讨论报告。
班级:模具1班小组成员:郑福鑫110101020059吴立军110101020049周坤110101020062杨钊110101020061邢增日110101020058目录16.1 网格划分原则一、网格数量二、网格疏密三、单元阶次四、网格质量五、网格分界面和分界点六、位移协调性七、网格布局16.2 网格划分方法一、半自动分网方法二、自动分网方法三、自适应分网16.1 网格划分原则一.网格数量网格数量又称绝对网格密度,由网格的整体和局部尺寸控制。
其多少主要影响结果精度和计算规模。
1.结果精度网格数增加,结果精度一般会提高。
因为:(1)网格边界能更好逼近几何模型的曲线或曲面边界(2)单元插值函数能更好逼近实际函数(3)在应力梯度较大的部位,能更好反映应力值的变化但网格数太大时,数值计算的累积误差反而会降低计算精度2.计算规模网格数量增加,主要增加以下计算时间。
(1)单刚形成时间(2)方程求解时间(3)网格划分时间选择网格量时还应考虑分析类型和特点,可遵循以下原则:(1)静力分析。
对变形可较少网格;对应力或应变应较多。
(2)固有特性分析。
对低阶模态可较少网格,对高阶应较多。
其中集中质量矩阵法精度低于一致质量矩阵法,应更多网格。
(3)响应分析。
对位移响应可较少网格;对应力响应应较多。
(4)热分析。
对热传导,结构内部温度梯度趋于常数,可较少内部单元;对热变形和热应力,按位移和应力原则选。
二、网格疏密网格疏密又称相对网格密度,指不同部位网格大小不同应力集中区(梯度变化较大处)应较密网格计算精度不随网格数绝对增加,网格数应增加到关键部位网络有疏密时,要注意疏密之间的过渡。
一般原则是网格尺寸突变最少,以免畸形或质量较差的网络。
常见过渡方式1.单元过渡。
用三角形过渡四边形、用四面体和五面体过渡六面体。
2.强制过渡。
用约束条件保持大小网格间的位移连续。
第8课网格划分拖拉/扫略(extrude/sweep)网格划分选项(续)拖拉/扫略(extrude/sweep)网格划分选项(续)扫略网格划分:Main Menu >Preprocessor >Mesh >-Volume-1. .....2. .....3. .....Main Menu > Preprocessor > Mesh > -Volume-Sweep 1.拾取几何体Procedure 2.选择几何体上的初始面(不必已划分网格)3.选择目标面(目标面与初始面相对)说明: 几何体应满足topologically consistent控制网格密度•有限元方法为数值计算方法,计算结果有误差。
但网格越密时,计算结果越接近数学模型的真实解。
通常情况下,网格的密度应在这两种之间。
用户应根据分析目的和结果的精度要求决定网格划分的密度大小。
控制网格密度(续)你可以在特定的线上指定划分的单元数目,并且网格的密度可以沿线过渡。
(MeshTool > Lines > Set)。
这种设置优先于其他设置。
或者,可以在某些关键点处设置网格单元尺寸(MeshTool > Keypts >Set。
与此关键点相连的线如果)与此关键点相连的线如果未被预先设置划分的话,也会被调整。
在关键点处设置单元大小(其它单元尺寸由global element size 控制)global element size自由网格映射网格对单元的形状没有限制· 受映射网格模式及其单元形状限制· 通常单元排列整齐· 几何模型应由规则的面或体构成映射网格(续)2D四边形过渡网格•对于四边面和六面体,相对的对于四边面和六面体相对的边或面的单元数目可以不同•过渡网格有几种模式,边线的单元数必须与给定的模式相符映射网格(续)3-D六面体过渡网格3D映射网格(续)关于单元形状检查的说明。
有限元⽹格划分⽅法与基本原理结构有限元分析中的⽹格划分技术及其应⽤实例结构有限元分析中的⽹格划分是否直接关系到解算的效果。
本⽂简述了⽹格划分应⽤的基本理论,并以空间⾃由曲⾯覆盖件和⼤型整体⽹络钢筋壳体产品的有限元分析中的⽹格划分为实例对象,详细讲述了空间⾃由和三维实体的⽹格划分基本理论及其在⼯程中的实际应⽤,⾮常具有现实意义和借鉴价值。
⼀、前⾔有限元⽹格划分是进⾏有限元数值模拟分析⾄关重要的⼀步,它直接影响着后续数值计算分析结果的精确性。
⽹格划分涉及单元的形状及其拓扑类型、单元类型、⽹格⽣成器的选择、⽹格的密度、单元的编号以及⼏何体素。
从⼏何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。
同理,平⾯应⼒和平⾯应变情况设计的单元求解⽅程也不相同。
在有限元数值求解中,单元的等效节点⼒、刚度矩阵、质量矩阵等均⽤数值积分⽣成,连续体单元以及壳、板、梁单元的⾯内均采⽤⾼斯(Gauss)积分,⽽壳、板、梁单元的厚度⽅向采⽤⾟普⽣(Simpson)积分。
⾟普⽣积分点的间隔是⼀定的,沿厚度分成奇数积分点。
由于不同单元的刚度矩阵不同,采⽤数值积分的求解⽅式不同,因此实际应⽤中,⼀定要采⽤合理的单元来模拟求解。
CAD软件中流⾏的实体建模包括基于特征的参数化建模和空间⾃由曲⾯混合造型两种⽅法。
Pro/E和 SoildWorks 是特征参数化造型的代表,⽽ CATIA 与 Unigraphics 等则将特征参数化和空间⾃由曲⾯混合造型有机的结合起来。
现有 CAD软件对表⾯形态的表⽰法已经⼤⼤超过了CAE软件,因此,在将 CAD实体模型导⼊CAE软件的过程中,必须将 CAD模型中其他表⽰法的表⾯形态转换到CAE软件的表⽰法上,转换精度的⾼低取决于接⼝程序的好坏。
在转换过程中,程序需要解决好⼏何图形(曲线与曲⾯的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。
其中⼏何图形的传递相对容易实现,⽽图形间的拓扑关系容易出现传递失败的情况。
(完整版)网格划分设计知识点汇总一、网格设计而非划分在进行数值模拟计算(包括FEA、CFD等)中,网格的质量对分析计算的结果有至关重要的影响。
高质量的网格是高精度分析结果的保证,而质量不好或者差的网格,则可能会导致计算的无法完成或者得到无意义的结果。
划分网格是需要认真考虑的,它内部的计算方程需要设计出好的网格,计算才能更准确。
在一个完整的分析计算过程中,与网格设计和修改相关的前处理工作占到了CAE工程师工作量的70-80%,CAE工程师往往要花费大量的时间来进行网格处理,真正用于分析计算的时间很少,所以主要的瓶颈在于如何快速准备好高质量的满足分析计算要求的网格。
该项工作对技术人员的技术经验和背景有相当高的要求。
具体的说,就是要求前处理工程师能够根据CAE工程师提出的分析要求“设计”出能满足CAE工程师分析要求的合适的网格,然后提交给CAE工程师进行分析计算。
之所以是网格“设计”而不是网格“划分”,说明了要设计出能够满足分析计算要求的高质量的网格,并不是一件容易的事情,要完成这项工作需要很多方面的知识和技术要求。
针对一个具体的分析计算要求,要获得一个满足该分析计算的高质量网格,需要从以下几个方面进行综合考虑:1.分析计算的目的(定性还是定量?)。
2.分析计算的类型,如强度分析、刚度分析、耐久性分析、NVH 分析、碰撞分析、CFD分析、热流分析、动力学响应分析等。
(不同的分析类型对网格的质量和形状有不同的要求。
)3.分析计算的时间要求。
(要求时间的紧迫与否也决定了采用何种网格形式)4.分析计算所采用的求解器。
(不同的求解器对不同的分析问题有特定的网格形式和要求)5.分析计算可能应用的单元类型。
(所应用的求解器可以采用的单元类型,也会决定网格的质量与形状要求)6. 尽可能采用最好的网格类型。
(对于面,尽可能采用四边形网格;对于体,尽可能采用六面体单元)由此可见,满足计算分析要求的高质量的网格是由前处理工程师精心“设计”出来的,而不是随随便便“划分”出来的。
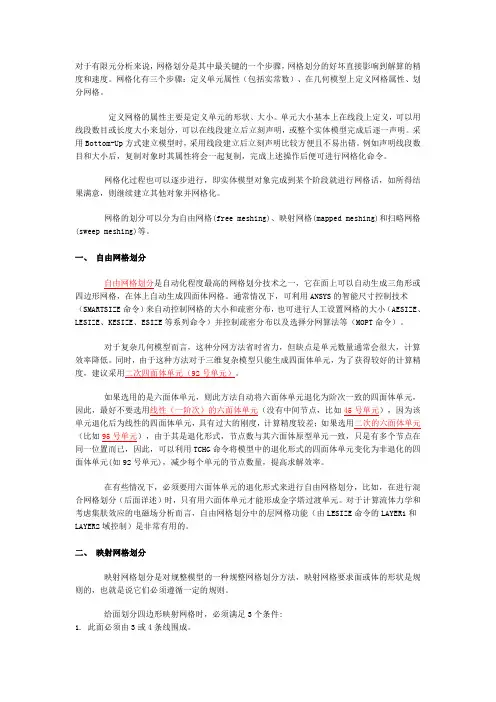
对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。
网格化有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。
定义网格的属性主要是定义单元的形状、大小。
单元大小基本上在线段上定义,可以用线段数目或长度大小来划分,可以在线段建立后立刻声明,或整个实体模型完成后逐一声明。
采用Bottom-Up方式建立模型时,采用线段建立后立刻声明比较方便且不易出错。
例如声明线段数目和大小后,复制对象时其属性将会一起复制,完成上述操作后便可进行网格化命令。
网格化过程也可以逐步进行,即实体模型对象完成到某个阶段就进行网格话,如所得结果满意,则继续建立其他对象并网格化。
网格的划分可以分为自由网格(free meshing)、映射网格(mapped meshing)和扫略网格(sweep meshing)等。
一、自由网格划分自由网格划分是自动化程度最高的网格划分技术之一,它在面上可以自动生成三角形或四边形网格,在体上自动生成四面体网格。
通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE 命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。
对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。
同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。
如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性(一阶次)的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过大的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元(如92号单元),减少每个单元的节点数量,提高求解效率。
第3章网格划分技术及技巧-图文创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三个步骤:⑴定义单元属性单元属性包括单元类型、实常数、材料特性、单元坐标系和截面号等。
⑵定义网格控制选项★对几何图素边界划分网格的大小和数目进行设置;★没有固定的网格密度可供参考;★可通过评估结果来评价网格的密度是否合理。
⑶生成网格★执行网格划分,生成有限元模型;★可清除已经生成的网格并重新划分;★局部进行细化。
3.1定义单元属性3.1.1单元类型1.定义单元类型命令:ET,ITYPE,Ename,KOP1,KOP2,KOP3,KOP4,KOP5,KOP6,INOPRITYPE---用户定义的单元类型的参考号。
KOP1~KOP6---单元描述选项,此值在单元库中有明确的定义,可参考单元手册。
也可通过命令KEYOPT进行设置。
INOPR---如果此值为1则不输出该类单元的所有结果。
例如:et,1,link8!定义LINK8单元,其参考号为1;也可用ET,1,8定义et,3,beam4!定义BEAM4单元,其参考号为3;也可用ET,3,4定义2.单元类型的KEYOPT命令:KEYOPT,ITYPE,KNUM,VALUEITYPE---由ET命令定义的单元类型参考号。
KNUM---要定义的KEYOPT顺序号。
VALUE---KEYOPT值。
该命令可在定义单元类型后,分别设置各类单元的KEYOPT参数。
例如:et,1,beam4!定义BEAM4单元的参考号为1et,3,beam189!定义BEAM189单元的参考号为3keyopt,1,2,1!BEAM4单元考虑应力刚度时关闭一致切线刚度矩阵keyopt,3,1,1!考虑BEAM189的第7个自由度,即翘曲自由度!当然这些参数也可在ET命令中一并定义,如上述四条命令与下列两条命令等效:et,1,beam4,,1et,3,beam189,13.自由度集命令:DOF,Lab1,Lab2,Lab3,Lab4,Lab5,Lab6,Lab7,Lab8,Lab9,Lab104.改变单元类型命令:ETCHG,Cnv5.单元类型的删除与列表删除命令:ETDELE,ITYP1,ITYP2,INC列表命令:ETLIST,ITYP1,ITYP2,INC3.1.2实常数1.定义实常数命令:R,NSET,R1,R2,R3,R4,R5,R6续:RMORE,R7,R8,R9,R10,R11,R12NSET---实常数组号(任意),如果与既有组号相同,则覆盖既有组号定义的实常数。
1、划分有限元网格后,不能再删除节点和单元,也不能再进行布尔运算,除非将网格也清除。
2、网格划分的三个步骤(a)定义单元属性。
即Mesh Attributes(b)定义网格控制。
即MeshTool、Size Cntrls(c)生成网格。
即Mesh3、自由网格对单元形状是无限制的,可以划分任意形状的单元;映射网格划分,划分面单元时只能划分成三角形或四边形单元而划分体单元时只能划分成六面体单元,不能划分成四面体单元,也就是说映射网格划分的模型需要是规则形状,明显的成排4、第一步是定义单元属性。
主要是设定以下的信息:单元类型ET/实常数R/材料特性MP/单元坐标系/截面号等注意对梁(Beam)单元划分时,要给出方向关键点作为线的属性。
5、网格划分控制网格划分控制能控制网格单元的形状、中间节点位置、单元大小等。
在整个分析中最为重要。
(a)网格划分工具(MeshTool)可以达到的目的控制智能尺寸(smartsizing)。
可以设置网格单元的尺寸:包括网格数和网格单元的大小。
可以指定网格单元的形状【Tri/Quad/Tet/Hex】可以指定网格划分的方式:自由划分free、映射划分mapping或者是扫射划分sweeping可以清除网格(clear)可以细化网格(refine d at)6、网格单元的形状对于一个模型可以用多种类型不同的网格,但是一般情况不要混用。
7、此算法首先对划分网格的面或体的所有线估算单元边长,然后对集合体的弯曲和接近区域的线进行四化。
最后划分。
8、关于映射网格划分包括面的映射网格划分和体的映射网格划分。
面的映射网格划分的条件:(1)面必须是三角形或四边形(2)面的对边划分相同数目的单元(NIDV)或划分时有过渡网格进行配合(3)如面是三角形单元,则划分的单元必须为偶数且各边单元数目相等(4)若面的边多余四条,则不能直接进行映射网格划分,可以将一些线合并或连接,减少边数,然后进行映射网格划分体的映射网格划分(1)划分的网格单元只能是六面体单元(2)体必须要有6个或5个或4个面(3)对边必须划分成相同的单元数或采用过度网格(4)若体有4个或5个面,则三角形面上的单元分割数必须是偶数。
有限元网格生成方法正在发展。
要将众多研究者所用的纷繁的方法加以适当的分类,或将某一种具体方法准确地归入某一类,并不是一件容易的事。
本节从两个不同的角度对网格生成方法进行分类。
自动与半自动网格生成方法的综合分类二维网格生成方法先于三维网格生成而发展。
一些三维网格生成方法是二维方法的直接推广或受到二维方法的启发。
若将自动或半自动的网格生成方法综合起来,大体上可分成七种类型:1.网格平整法(Mesh Smoothing Approach)这一方法用来平整、改进已经生成的质量不好的初始网格,所采用的手段是拉普拉斯平整和参数平整。
2.拓扑分解法(Topology Decomposition Approach)将被剖分实体原本具有的顶点取为仅有的节点,然后将节点连成三角形(或四边形)单元,形成数量最少的三角形集合,这样形成的单元形状主要由被剖分实体的几何形状决定。
由于实体的复杂拓扑结构被分解成简单的三角形拓扑结构,因而这种方法称为拓扑分解法。
这样生成的网格只能是初始网格,必须采用网格细化技术改进网格质量。
3.节点连接法(Node Connection Approach)节点连接法研究在已知节点分布的情况下如何将这些节点连接起来,以构成在给定条件下形状最好的单元集合。
4.基于栅格的方法(Grid-Based Approach)这一方法利用一种栅格模板来生成网格,最初用于二维网格生成。
栅格模板是一种无限延伸的矩形或三角形网格。
将栅格模板重叠在被剖分的二维形体上,将落在形体外面的网格线移去,并对与物体边界相交的网格进行调整,以适合于物体的外形,这样做能够保证产生内部单元质量很好的网格。
这一方法已经推广到三维网格剖分。
图X07 单元映射法a)将物体分割成宏单元b) 网格模板映射到每个宏单元c) 构成最后的网格5.单元映射法(Mapped Element Approach)单元映射法并不是一种全自动的网格生成方法,它需要将一个任意的二维形体人工分割成三边或四边的区域,实际上这些区域是一些“宏单元”,每个区域必须再细分成供有限元分析用的单元。