STC12C5A60S2单片机双串口通信
- 格式:docx
- 大小:24.25 KB
- 文档页数:24
STC12C5A60S2 单片机双串口通信STC12C5A60S2 单片机是一款功能比较强大的单片机,它拥有两个全双工串行通信接口,串口1 的功能及操作与传统51 单片机串行口相同;特殊的是STC12C5A60S2 单片机内部有一个独立波特率发生器,串口1 可以使用定时器1 作为波特率发生器,也可以使用独立波特率发生器作为波特率发生器;而串口2 只能使用独立波特率发生器作为波特率发生器。
下面是一段双串口通信的程序:/***********************************************************************时间:2012.11.24芯片:STC12C5A60S2晶振:22.1184MHz 波特率:9600bps引脚定义:串行口1:发送TxD/P3.1;接收RxD/P3.0串行口2:发送TxD2/P1.3;接收RxD2/P1.2功能描述:STC12 双串口通信(中断方式)当串行口1 接收数据后,将此数据由串行口2 发送出去当串行口2 接收数据后,将此数据由串行口1 发送出去******************************************************************* ****/#include#define S2RI 0x01//串口2 接收中断请求标志位#define S2TI 0x02//串口2 发送中断请求标志位unsigned char flag1,flag2,temp1,temp2;/****************串行口初始化函数****************/void InitUART(void){TMOD = 0x20; //定时器1 工作在方式2 8 位自动重装SCON = 0x50; //串口1 工作在方式1 10 位异步收发REN=1 允许接收TH1 = 0xFA; //定时器1 初值TL1 = TH1;TR1 = 1; //定时器1 开始计数EA =1;//开总中断ES =1;//开串口1 中断S2CON = 0x50; //串口2 工作在方式1 10 位异步收发S2REN=1 允许接收BRT = 0xFA; //独立波特率发生器初值AUXR = 0x10; //BRTR=1 独立波特率发生器开始计数IE2 =0x01;//开串口2 中断ES2=1}/****************串行口1 发送****************/void UART_1SendOneByte(unsigned char c){SBUF = c;while(!TI); //若TI=0,在此等待TI = 0;}/****************串行口2 发送****************/void UART_2SendOneByte(unsigned char c){S2BUF = c;while(!(S2CON&S2TI)); //若S2TI=0,在此等待S2CON&=~S2TI; //S2TI=0}/*****************主函数******************/void main(void){InitUART();//串行口初始化while(1){//如果串口1 接收到数据,将此数据由串口2 发送if(flag1==1){flag1=0;UART_2SendOneByte(temp1);}//如果串口2 接收到数据,将此数据由串口1 发送if(flag2==1){flag2=0;UART_1SendOneByte(temp2);}}}/************串行口1 中断处理函数*************/ void UART_1Interrupt(void) interrupt 4{if(RI==1){RI=0;flag1=1;temp1=SBUF;}}/************串行口2 中断处理函数*************/ void UART_2Interrupt(void) interrupt 8{if(S2CON&S2RI){S2CON&=~S2RI;flag2=1;temp2=S2BUF;}}12C5A60S2.h 的头文件如下://--------------------------------------------------------------------------------//新一代1T 8051 系列单片机内核特殊功能寄存器C51 Core SFRs// 7 6 5 4 3 2 1 0 Reset Valuesfr ACC = 0xE0; //Accumulator 0000,0000sfr B = 0xF0; //B Register 0000,0000sfr PSW = 0xD0; //Program Status Word CY AC F0 RS1 RS0 OV F1 P 0000,0000//-----------------------------------sbit CY = PSW;sbit AC = PSW;sbit F0 = PSW ;sbit RS1 = PSW;sbit RS0 = PSW;sbit OV = PSW ;sbit P = PSW;//-----------------------------------sfr SP = 0x81; //Stack Pointer 0000,0111sfr DPL = 0x82; //Data Pointer Low Byte 0000,0000sfr DPH = 0x83; //Data Pointer High Byte 0000,0000//-------------------------------------------------------------------------------- //新一代1T 8051 系列单片机系统管理特殊功能寄存器// 7 6 5 4 3 2 1 0 Reset Valuesfr PCON = 0x87; //Power Control SMOD SMOD0 LVDF POF GF1 GF0 PD IDL 0001,0000// 7 6 5 4 3 2 1 0 Reset Valuesfr AUXR = 0x8E; //Auxiliary Register T0x12 T1x12 UART_M0x6 BRTR S2SMOD BRTx12 EXTRAM S1BRS 0000,0000//-----------------------------------sfr AUXR1 = 0xA2; //Auxiliary Register 1 - PCA_P4 SPI_P4 S2_P4 GF2 ADRJ - DPS 0000,0000/*PCA_P4:0, 缺省PCA 在P1 口1,PCA/PWM 从P1 口切换到P4 口: ECI 从P1.2 切换到P4.1 口,PCA0/PWM0 从P1.3 切换到P4.2 口PCA1/PWM1 从P1.4 切换到P4.3 口SPI_P4:0, 缺省SPI 在P1 口1,SPI 从P1 口切换到P4 口: SPICLK 从P1.7 切换到P4.3 口MISO 从P1.6 切换到P4.2 口MOSI 从P1.5 切换到P4.1 口SS 从P1.4 切换到P4.0 口S2_P4:0, 缺省UART2 在P1 口1,UART2 从P1 口切换到P4 口: TxD2 从P1.3 切换到P4.3 口RxD2 从P1.2 切换到P4.2 口GF2: 通用标志位ADRJ:0, 10 位A/D 转换结果的高8 位放在ADC_RES 寄存器, 低2 位放在ADC_RESL 寄存器1,10 位A/D 转换结果的最高2 位放在ADC_RES 寄存器的低2 位, 低8 位放在ADC_RESL 寄存器DPS: 0, 使用缺省数据指针DPTR01,使用另一个数据指针DPTR1*///-----------------------------------sfr WAKE_CLKO = 0x8F; //附加的SFR WAK1_CLKO/*7 6 5 4 3 2 1 0 Reset ValuePCAWAKEUP RXD_PIN_IE T1_PIN_IE T0_PIN_IE LVD_WAKE _ T1CLKO T0CLKO 0000,0000Bb7 - PCAWAKEUP : PCA 中断可唤醒powerdown。
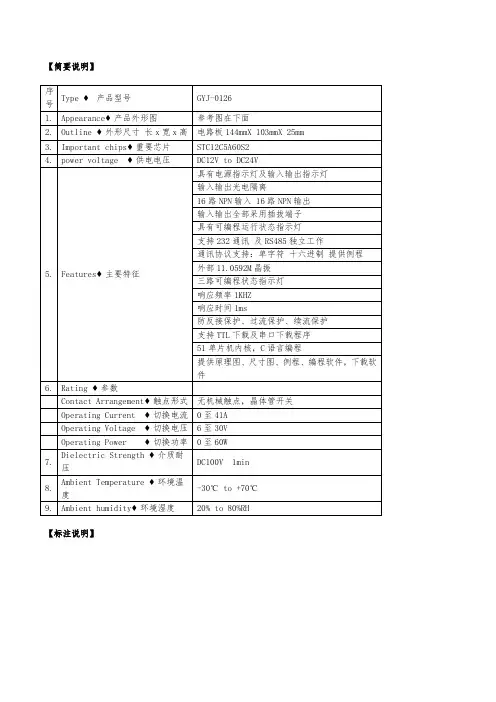
【简要说明】【标注说明】【接线说明】【输入控制设备】【输出控制设备】【UART通信说明】也可以TTL下载【串口通信说明】也可以通过串口下载【485通信说明】【原理图】提供PDF格式*********************************************************************/ #include "hedder\\STC12C5A60S2.h"#include"hedder\\DODI.h"#define uchar unsigned char#define uint unsigned intuchar dat;bit bz1=0;bit bz2=0;bit bz3=0;bit bz4=0;bit bz5=0;bit bz6=0;bit bz7=0;bit bz8=0;bit bz9=0;bit bz10=0;bit bz11=0;bit bz12=0;bit bz13=0;bit bz14=0;bit bz15=0;bit bz16=0;/********************************************************************串口初始化*********************************************************************/ void init (){//串口2波特率TMOD = 0x20; //定时器1产生波特率SCON = 0x50; //方式1,8位数据,波特率可变TH1=0xfd;TL1 = 0xfd; //波特率9600//串口1波特率S2CON = 0x50; //方式1,八位数据,可变波特率BRT=0XFD; //设置波特率9600TR1=1; //启动定时器产生串口2波特率AUXR=0x10; //启动串口1波特率发生器IP=0x00; //优先级默认EA=1; //开总中断ES=1; //开串口1中断IE2=0x01; //开串口2中断}/*// 串口一发送一个字符void uart1_txd(uchar x){SBUF = x;}// 串口二发送一个字符void uart2_txd(uchar x){S2BUF = x;}*//********************************************************************延时函数*********************************************************************/ void delay ( uint t ){uint i,j;for( i=0; i<t; i++)for( j=0; j<250; j++);}/********************************************************************主函数*********************************************************************/void main(){uchar k=10;//配置P4.4为IO口P4SW|=0x70;P4M0&=0x80;P4M1&=0x80;init(); //串口初始化fxctl=0; //485接收while(1){/********************************************************************接收数据判断函数*********************************************************************/ switch(dat) //接收数据判断{case 'I':OUT1=0;OUT2=0;OUT3=0;OUT4=0;OUT5=0;OUT6=0;OUT7=0;OUT8=0;OUT9=0;OUT10=0;OUT11=0;OUT12=0;OUT13=0;OUT14=0;OUT15=0;OUT16=0;delay(k);break; // 全开case 'i':OUT1=1;OUT2=1;OUT3=1;OUT4=1;OUT5=1;OUT6=1;OUT7=1;OUT8=1;OUT9=1;OUT10=1;OUT11=1;OUT12=1;OUT13=1;OUT14=1;OUT15=1;OUT16=1;delay(k);break; // 全关case 'A': OUT1=0;delay(k);break; // 第一路开case 'B': OUT2=0;delay(k);break; // 第二路开case 'C': OUT3=0;delay(k);break; // 第三路开case 'D': OUT4=0;delay(k);break; // 第四路开case 'E': OUT5=0;delay(k);break; // 第五路开case 'F': OUT6=0;delay(k);break; // 第六路开case 'G': OUT7=0;delay(k);break; // 第七路开case 'H': OUT8=0;delay(k);break; // 第八路开case 'J': OUT9=0;delay(k);break; // 第九路开case 'K': OUT10=0;delay(k);break; // 第十路开case 'L': OUT11=0;delay(k);break; // 第十一路开case 'M': OUT12=0;delay(k);break; // 第十二路开case 'N': OUT13=0;delay(k);break; // 第十三路开case 'O': OUT14=0;delay(k);break; // 第十四路开case 'P': OUT15=0;delay(k);break; // 第十五路开case 'Q': OUT16=0;delay(k);break; // 第十六路开case 'a': OUT1=1;delay(k);break; // 第一路关case 'b': OUT2=1;delay(k);break; // 第二路关case 'c': OUT3=1;delay(k);break; // 第三路关case 'd': OUT4=1;delay(k);break; // 第四路关case 'e': OUT5=1;delay(k);break; // 第五路关case 'f': OUT6=1;delay(k);break; // 第六路关case 'g': OUT7=1;delay(k);break; // 第七路关case 'h': OUT8=1;delay(k);break; // 第八路关case 'j': OUT9=1;delay(k);break; // ...case 'k': OUT10=1;delay(k);break; // ...case 'l': OUT11=1;delay(k);break; // ...case 'm': OUT12=1;delay(k);break; // ...case 'n': OUT13=1;delay(k);break; // ...case 'o': OUT14=1;delay(k);break; // ...case 'p': OUT15=1;delay(k);break; // ...case 'q': OUT16=1;delay(k);break; // ...default:break; // 跳出}if((IN1==0)&&(bz1==0)){delay(100);if(IN1==0){OUT1=0;bz1=1;}} if((IN1==1)&&(bz1==1)){delay(100);if(IN1==1){OUT1=1;bz1=0;}}if((IN2==0)&&(bz2==0)){delay(100);if(IN2==0){OUT2=0;bz2=1;}} if((IN2==1)&&(bz2==1)){delay(100);if(IN2==1){OUT2=1;bz2=0;}}if((IN3==0)&&(bz3==0)){delay(100);if(IN3==0){OUT3=0;bz3=1;}} if((IN3==1)&&(bz3==1)){delay(100);if(IN3==1){OUT3=1;bz3=0;}}if((IN4==0)&&(bz4==0)){delay(100);if(IN4==0){OUT4=0;bz4=1;}}if((IN4==1)&&(bz4==1)){delay(100);if(IN4==1){OUT4=1;bz4=0;}}if((IN5==0)&&(bz5==0)){delay(100);if(IN5==0){OUT5=0;bz5=1;}}if((IN5==1)&&(bz5==1)){delay(100);if(IN5==1){OUT5=1;bz5=0;}}if((IN6==0)&&(bz6==0)){delay(100);if(IN6==0){OUT6=0;bz6=1;}}if((IN6==1)&&(bz6==1)){delay(100);if(IN6==1){OUT6=1;bz6=0;}}if((IN7==0)&&(bz7==0)){delay(100);if(IN7==0){OUT7=0;bz7=1;}}if((IN7==1)&&(bz7==1)){delay(100);if(IN7==1){OUT7=1;bz7=0;}}if((IN8==0)&&(bz8==0)){delay(100);if(IN8==0){OUT8=0;bz8=1;}}if((IN8==1)&&(bz8==1)){delay(100);if(IN8==1){OUT8=1;bz8=0;}}if((IN9==0)&&(bz9==0)){delay(100);if(IN9==0){OUT9=0;bz9=1;}}if((IN9==1)&&(bz9==1)){delay(100);if(IN9==1){OUT9=1;bz9=0;}}if((IN10==0)&&(bz10==0)){delay(100);if(IN10==0){OUT10=0;bz10=1;}}if((IN10==1)&&(bz10==1)){delay(100);if(IN10==1){OUT10=1;bz10=0;}}if((IN11==0)&&(bz11==0)){delay(100);if(IN11==0){OUT11=0;bz11=1;}}if((IN11==1)&&(bz11==1)){delay(100);if(IN11==1){OUT11=1;bz11=0;}}if((IN12==0)&&(bz12==0)){delay(100);if(IN12==0){OUT12=0;bz12=1;}}if((IN12==1)&&(bz12==1)){delay(100);if(IN12==1){OUT12=1;bz12=0;}}if((IN13==0)&&(bz13==0)){delay(100);if(IN13==0){OUT13=0;bz13=1;}}if((IN13==1)&&(bz13==1)){delay(100);if(IN13==1){OUT13=1;bz13=0;}}if((IN14==0)&&(bz14==0)){delay(100);if(IN14==0){OUT14=0;bz14=1;}}if((IN14==1)&&(bz14==1)){delay(100);if(IN14==1){OUT14=1;bz14=0;}}if((IN15==0)&&(bz15==0)){delay(100);if(IN15==0){OUT15=0;bz15=1;}}if((IN15==1)&&(bz15==1)){delay(100);if(IN15==1){OUT15=1;bz15=0;}}if((IN16==0)&&(bz16==0)){delay(100);if(IN16==0){OUT16=0;bz16=1;}}if((IN16==1)&&(bz16==1)){delay(100);if(IN16==1){OUT16=1;bz16=0;}}}}/********************************************************************串口一发送接收中断函数*********************************************************************/ void uart_isr() interrupt 4{if( RI ) RI = 0;dat = SBUF;if( TI ) TI = 0;}/********************************************************************串口二发送接收中断函数*********************************************************************/ void uart2_isr() interrupt 8{if( S2CON & 0x01 ){S2CON &= ~0x01;dat= S2BUF;}if( S2CON & 0x02 ){S2CON &= ~0x02;}}/********************************************************************结束*********************************************************************/ 【尺寸图】【图片展示】。
#include <stc12c5a60s2.h>#include<string.h>unsigned char yb;unsigned char n[14];char nn;unsigned char sn;unsigned char num,mm; //定时器计数unsigned char sn;unsigned char adcnum[8]; //ad转换结果unsigned char adcyb; //ad转换游标unsigned char ssbuf[12]; //串口缓存unsigned char syb;sbit dat=P3^2;sbit clk=P3^3;sbit load=P3^6;sbit dat1=P3^4;sbit clk1=P3^5;sbit load1=P3^7;sbit sys=P4^4;sbit sc1=P4^6;sbit sc2=P4^5;sbit led1 = P0^6;void ssend(){SBUF=ssbuf[0];syb=1;}void adc(void) interrupt 5{adcnum[adcyb]=ADC_RES; //存储结果//adcnuml[adcyb]=ADC_RESL; //低两位adcyb++;if (adcyb>7){adcyb=0;ADC_CONTR=(0XE0|adcyb);ssbuf[0]=253;ssbuf[1]=adcnum[0];ssbuf[2]=adcnu m[1];ssbuf[3]=adcnum[2];ssbuf[4]=adcnum[3];ssbuf[5]=adcnum[4];ssbuf[6]=adcnum[5];ssbuf[7]=adcnum[6];ssbuf[8]=adcnum[7];ssbuf[9] =254;ssbuf[10]=0x0d;ssbuf[11]='\n';ssend();}else{ADC_CONTR=(0xe8|adcyb);} //继续下一位}void out(unsigned char a1,unsigned char a2,unsigned char sin) {load=1;clk=1; dat=a1; clk=0;clk=1; dat=a2; clk=0;clk=1; dat=1; clk=0;clk=1;dat=(sin>>7); clk=0;clk=1;dat=((sin & 0x40)>>6);clk=0;clk=1;dat=((sin & 0x20)>>5);clk=0;clk=1;dat=((sin & 0x10)>>4);clk=0;clk=1;dat=((sin & 0x08)>>3);clk=0;clk=1;dat=((sin & 0x04)>>2);clk=0;clk=1;dat=((sin & 0x02)>>1);clk=0;clk=1;dat=(sin & 0x01);clk=0;clk=1;load=0;load=1;}void out1(unsigned char a1,unsigned char a2,unsigned char sin) {load1=1;clk1=1; dat1=a1; clk1=0;clk1=1; dat1=a2; clk1=0;clk1=1; dat1=1; clk1=0;clk1=1;dat1=(sin>>7); clk1=0;clk1=1;dat1=((sin & 0x40)>>6);clk1=0;clk1=1;dat1=((sin & 0x20)>>5);clk1=0;clk1=1;dat1=((sin & 0x10)>>4);clk1=0;clk1=1;dat1=((sin & 0x08)>>3);clk1=0;clk1=1;dat1=((sin & 0x04)>>2);clk1=0;clk1=1;dat1=((sin & 0x02)>>1);clk1=0;clk1=1;dat1=(sin & 0x01);clk1=0;clk1=1;load1=0;load1=1;}void delay(int nu){unsigned int m,n;for(m=1;m<=nu;m++)for(n=1;n<2000;n++);}void cl(void){if(yb>13)if((n[0]==0xfd)&&(n[13]==0xfe)){yb=0;out(0,0,n[1]);out(0,1,n[2]);out(1,0,n[3]);out(1,1,n[4]);out1(0,0,n[5]);out1(0,1,n[6]);out1(1,0,n[7]);out1(1,1,n[8]);P0=n[9];P1=n[10];// P2=n[11];sc1=1;sc1=0;// P2=n[12];sc2=1;sc2=0;sn=1;}else{yb=0;}else{yb=0;}}void initex(){IT0=1;IT1=1; //设置外部中断触发方式0为负电平触发1为负跳变触发EX0=1;EX1=1; //开外部中断}void main (void){ //锁存器锁存P1M1=0xe7;P1M0=0x00; //PmMn m=4,3,2,1 n=0,1 (m:0 0 准双向0 1 推挽1 0 仅输入1 1 开漏)P1ASF=0xe7; //打开P1口的ad转换功能1110 0111 (bit7-bit0)ADC_CONTR=0xe0; //设置adc_power speed1 speed0 adc_flag adc_start chs2 chs1 chs0 1110 0000EADC=1;initex();P4SW=0x70; //启动p4口x000 xxxxSCON = 0x50; /* SCON: 模式1, 8-bit UART, 使能接收*/ TMOD |= 0x21; /* TMOD: timer 1, mode 2, 8-bit reload */AUXR|=0x40; //开12倍速9600变115200TH1 = 0xfd; /* TH1: reload value for 9600 baud @ 11.0592MHz */TH0=65534/256;TL0=65534%256;TR1 = 1; /* TR1: timer 1 run */ TR0=1;ET0=1;EA = 1; /*打开总中断*/ES = 1;TI=0; /*打开串口中断*/yb=0;sn=0;sn=1;mm=0; //灯慢速显示ADC_CONTR |=0x08; //开始转换while (1) /*主循环不做任何动作*/{}}void tmr0(void) interrupt 1{TH0=65534/256;TL0=65534%256;num++;mm++;if(mm>1000){led1=!led1;ADC_CONTR|=0x08; //adc转换开始xxxx 1xxx(adc_start)mm=0;}if (((num==25)|(num==50)|(num==75)) & sn){sys=!sys;}if (num>=100){num=0;sys=!sys;sn=0;}}void UART_SER (void) interrupt 4 //串行中断服务程序{unsigned char Temp; //定义临时变量if(RI) //判断是接收中断产生{RI=0; //标志位清零Temp=SBUF; //读入缓冲区的值n[yb]=Temp;yb++;if (yb>13){cl();}if (Temp==0xfe){cl();}}if(TI) //如果是发送标志位,清零{TI=0;if (syb<12){SBUF=ssbuf[syb];syb++;}else{syb=0;}}}。
STC12C5A60S2简介STC12C5A60S2是STC生产的单时钟/机器周期(1T)的单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换,针对电机控制,强干扰场合。
1、增强型8051CPU,1T(1024G),单时钟/机器周期2、工作电压 5.5-3.5V3、1280字节RAM4、通用I/O口,复位后为:准双向口/弱上拉可设置成四种模式:准双向口/弱上拉,强推挽/强上拉,仅为输入/高阻,开漏每个I/O口驱动能力均可达到20mA,但整个芯片最大不要超过120mA5、有EEPROM功能6、看门狗7、内部集成MAX810专用复位电路8、外部掉电检测电路9、时钟源:外部高精度晶体/时钟,内部R/C振荡器常温下内部R/C振荡器频率为:5.0V单片机为:11~17MHz3.3V 单片机为:8~12MHz10、4个16位定时器两个与传统8051兼容的定时器/计数器,16位定时器T0和T111、3个时钟输出口,可由T0的溢出在P3.4/T0输出时钟,可由T1的溢出在P3.5/T1输出时钟,独立波特率发生器可以在P1.0口输出时钟12、外部中断I/O口7路,传统的下降沿中断或电平触发中断,并新增支持上升沿中断的PCA模块,Power Down模式可由外部中断唤醒,INT0/P3.2,INT1/P3.3,T0/P3.4,T1/P3.5,RxD/P3.0,CCP0/P1.3,CCP0/P1.313、PWM2路14、A/D转换,10位精度ADC,共8路,转换速度可达250K/S15、通用全双工异步串行口(UART)16、双串口,RxD2/P1.2,TxD2/P1.317、工作范围:-40~8518、封装:LQFP-48,LQFP-44,PDIP-40,PLCC管脚说明P0.0~P0.7 P0:P0口既可以作为输入/输出口,也可以作为地址/数据复用总线使用。
STC12C5A60S2双串口使用程序(已经验证成功)#include <stc12c5a60s2.h>#include "intrins.h" #define uchar unsigned char#define S2RI 0x01 // 串口 2 接收中断请求标志位#define S2TI 0x02 // 串口 2 发送中断请求标志位//================================================// 对于将 P4.4 、 P4.5 当做 I/O 口使用必须添加的定义 ||//================================================/*sbit butto n 仁P4^3; sbit butt on 2=P4A 4; sbit butto n3=P4A5; sbitbutton4=P4A6;*/ uchar code temp1[]={" 白云: “我可是个名人” "};uchar code temp2[]={" 黑土: 八、“啥名人啊,你就是个人名” "};uchar code temp3[]={" 小崔: “诶,大叔大妈,你俩都冷静冷静” "uchar code temp4[]={" 观众: “哈哈哈哈” "};/*void delay_1ms(uchar ii) // 误差 {unsigned char a,b; for(; ii>0; ii--)for( b = 18; b>0; b--)for( a = 152; a>0; a--);_nop_(); //if Keil,require use intrins.h }void delay1s(void) // 误差 -0.5us {unsigned char a,b,c;for( c = 212; c>0; c--)for( b = 160; b>0; b--)for( a = 80; a>0; a--);_nop_(); //if Keil,require use intrins.h_nop_(); //if Keil,require use intrins.h}*/用于存放串口 1 接收的字符 // 用于存放串口 2 接收的字符//* ***********************串口通信部分 ******************************sfr p4sw=0xbb; 用)// 需在主函数文件中做相应设置 4、5、6 为1(作为 I/O 口使 uchar wj_uun = '!'; // uchar wj_uun2 = '?';void s1_send_char(uchar dat) {SBUF = dat;// while(!TI);//TI TI = 0;// }void s1_send_string(uchar *pt)// 发送端 ( 发送的是字符 ) // 通过调用发送字符函数来发送字符数组{ while(*pt != '\0') { s1_send_char(*pt++);发送端 ( 发送的是字符 )将字符送入串口 2 的发送缓冲寄存器 判断发送是否结束: S2CON.bit2 = 0:发送中 1 : 手动清零标志位,令 S2CON.bit2 = 0通过调用发送字符函数来发送字符数组 while(*pt2!='\0')void bt_uart_init() // {//SCON=0X50; SM0 = 0; 允许串口接收 SM1 = 1; REN = 1; 单片机双串口初始化// SM0=0 SM1=1 SM2=0 REN=1// 串口工作方式 1:1 位起始位, 8 位数据位, 1 位停止位 // 允许串口接收 //RI=1; // 接收标志位, 0:正在接收 1 :接收完毕 ( 如果 RI=1 就一直执行串口中断 ) TMOD = 0X20; // TH1 = 0XFD; // 9600bit/s TL1 = 0XFD; TR1 = 1; // EA = 1; // ES = 1; // 定时器 T1 工作方式 2 下的定时器初值 启动定时器 T1 开总中断 开串行口中断 S2CON = 0x50;S2REN=1允许接收 BRT = 0XFD; AUXR =0x10; // 串口 2 工作在方式 1 10 位异步收发 S2SM0=0 S2SM1=1 // 9600bit/s 下的独立波特率发生器初值 // 辅助寄存器 :0001 0000 ->BRTR=1: 独立波特率发生器开 始计数,S2SMOD=0波特率不加倍, IE2 = 0x01; // BRTx12=0:独立波特率每12个时钟计数一次开串口 2 中断 0000 0001->ES2=1 // AUXR1 = 0x10; // 0001 0000->S2_P4=1:UART2 从 P1 口(RxD2:P1.2 TxD2:P1.3)切换到 P4 口(RxD2:P4.2 TxD2:P4.3) 否则默认都为 P1 口}************ 串口 1 发送函数 *************** } ************ 串口 2 发送函数 *****************/ 将字符送入发送缓冲寄存器 为发送状态标志位, 0:发送中 1 :发送结束 手动清零标志位 void s2_send_char(uchar dat2) // { S2BUF = dat2;// while(!(S2CON&S2TI));// 发送结束S2CON &= ~S2TI;// } void s2_send_string(uchar *pt2) //中断编号 4 为串行口 1 中断接收标志位, 0:正在接收 1 :接收完毕 ( 同样需要手动清零 将接收缓冲器接收的字符送入变量中void bt_serial_2() interrupt 8 // { if(S2CON&S2RI) // 收完毕 ( 如果 RI=1 就一直执行中断 ){S2CON &= ~S2RI; // wj_uun2 = S2BUF; // } 中断编号 8 为串行口 2 中断 接收标志位 : S2CON.bit1 = 0:正在接收 同样需要手动清零,令 S2CON.bit1 = 0 将串口 2 接收到的字符送入变量中************ 串口 2 中断程序 *************** s2_send_char(*pt2++); /************** 串口 1 中断程序 void bt_serial_1() interrupt 4 // {if(RI) // RI=1 就一直执行中断 ){RI = 0; // wj_uun = SBUF; //}*************** 如果 :接 }}// 串口初始化 // 0111 0000 对应的 4、5、 6 脚设置成功通用while(1){/*if(wj_uun != '!') // 串口 1 接收{s1_send_char(wj_uun); // 串口 1 发送 wj_uun = '!'; }*/if(wj_uun2 != '?')// 串口 2 接收{ s2_send_char(wj_uun2); //串口 2 发送 wj_uun2 = '?'; void main(void){ bt_uart_init(); p4sw = 0x70; 口 I/O。
#include <STC12C5A60S2.h>#include <Uart.h>#define uchar unsigned char#define uint unsigned int//=====================void delay(void){uint j,g;for(j=0;j<500;j++)for(g=0;g<500;g++);}//============================void main(){Uart_Two_Init();Uart_One_Init();while(1){Uart_One_Send('z');delay();Uart_Two_Send('z');UART_One_Printf("sb123456789\n");delay();UART_Two_Printf("sb123456789\n");delay();}}//======================================#ifndef __UART_H__#define __UART_H__#define uchar unsigned char#define uint unsigned int//=====================================//#define RELOAD 0xFA//#define RELOAD_TWO 0xfa//#define BRTx12_enable() AUXR |= 0x04 //BRT 独立波特率发生器的溢出率快12 倍//#define BRT_start() AUXR |= 0x10 //启动独立波特率发生器BRT 计数。
//=========================================uchar c = 0 ;uint d = 0 ;//=========================================//=======baud 9600=======================void Uart_One_Init() //串口1初始化函数,波特率9600TMOD=0x20;//设置定时器1为工作方式2TH1=0xfd; //设置波特率为9600TL1=0xfd;TR1=1;REN=1;SM0=0;SM1=1;EA=1;ES=1;// AUXR|=0X40; //T1*12;}//========================================void Uart_One_Send(char k) //串口1发送一个字符{ES = 0 ;SBUF=k;while(TI!=1);TI = 0 ;ES = 1 ;}//=========baud 9600=======================void Uart_Two_Init() //串口2初始化函数,波特率9600{S2CON= 0x50 ; //方式2,允许接收// BRT = RELOAD_TWO ;BRT = 0xfd; //设置波特率9600 AUXR = AUXR |0X10 ; //允许独立波特率发生器运行// BRTx12_enable();AUXR1 = AUXR1&0xef ; //S2_P4=0,将uart2切换到P1口IE2 = IE2|0X01; //允许串口2中断}//=========================================void Uart_Two_Send(uchar k) //串口2发送一个字符{ES = 0 ;S2BUF = k ;while((S2CON&0x02)!=0x02);S2CON &= ~0x02;ES = 1 ;}//=============================================void UART_One_Printf(uchar *p)while(* p!='\0') Uart_One_Send(*p++);}//============================================ void UART_Two_Printf(uchar *p){while(* p!='\0') Uart_Two_Send(*p++);}//=========================================== void Uart_One_Receive() interrupt 4{uint k = 0 ;if(RI==1){RI = 0 ;k = SBUF;}}//========================================void Uart_Two_Receive() interrupt 8{uchar a ;uint k = 0 ;// a = S2CON ;a = S2CON & 0x01;if(a==1){k = S2BUF ;S2CON = S2CON & 0xfe; //清0 S2RI }}//=====================================#endifLTC1605 - 16-Bit, 100ksps, Sampling ADC特点•Sample Rate: 100ksps 采样100K次/S•Single 5V Supply 单5V供电•Bipolar Input Range: ±10V 双极输入-10V----+10V•Power Dissipation: 55mW Typ 电源55MW•Integral Nonlinearity: ±2.0LSB Max •Guaranteed No Missing Codes•Signal-to-Noise Ratio: 86dB Typ •Operates with Internal or External Reference •Internal Synchronized Clock•Improved 2nd Source to ADS7805 and AD976 •28-Pin 0.3” PDIP, SSOP and SW Packages。
STC12C5A60S2单片机开发学习板产品使用手册【简要说明】一、尺寸:长83mmX宽79mmX高18mm二、主要芯片:STC12C5A60S2单片机三、工作电压:直流6~15伏四、、特点:1、具有电源指示;2、所有I/O口已引出;3、可以实现与电脑串口通信;4、可以实现双串口通讯;5、具有上电复位和手动复位;6、附带SD卡读写接口;7、支持STC串口下载;8、双串口通讯(注:只能使用COM1下载程序);9、八路LED灯(注:可拔出短路帽,断开LED灯);10、可端子接线供电、可排针引电;11、7805供电,输入电压范围宽,且确保AD参考电压准确(注:因无外部参考电压点)五、提供相关软件、资料、原理图适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
注意啦:本产品提供的所有程序都附带原理图以及说明!【图片标注】【原理图】(放大可以看清楚)【PCB尺寸图】【开发板支持同系列单片机的型号】STC单片机最新型号——STC12C5A60S2STC12C5A60S2/AD/PWM系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),针对电机控制,强干扰场合。
1.增强型8051 CPU,1T,单时钟/机器周期,指令代码完全兼容传统8051;2.工作电压:STC12C5A60S2系列工作电压:5.5V-3.3V(5V单片机)STC12LE5A60S2系列工作电压:3.6V-2.2V(3V单片机);3.工作频率范围:0 - 35MHz,相当于普通8051的 0~420MHz;4.用户应用程序空间8K /16K / 20K / 32K / 40K / 48K / 52K / 60K / 62K字节;5.片上集成1280字节RAM;6.通用I/O口(36/40/44个),复位后为:准双向口/弱上拉(普通8051传统I/O口),可设置成四种模式:准双向口/弱上拉,推挽/强上拉,仅为输入/高阻,开漏,每个I/O口驱动能力均可达到20mA,但整个芯片最大不要超过55Ma;7. ISP(在系统可编程)/IAP(在应用可编程),无需专用编程器,无需专用仿真器可通过串口(P3.0/P3.1)直接下载用户程序,数秒即可完成一片;8.有EEPROM功能(STC12C5A62S2/AD/PWM无内部EEPROM);9. 看门狗;10.内部集成MAX810专用复位电路(外部晶体12M以下时,复位脚可直接1K电阻到地);11.外部掉电检测电路:在P4.6口有一个低压门槛比较器,5V单片机为1.32V,误差为+/-5%,3.3V单片机为1.30V,误差为+/-3%;12.时钟源:外部高精度晶体/时钟,内部R/C振荡器(温漂为+/-5%到+/-10%以内) 1用户在下载用户程序时,可选择是使用内部R/C振荡器还是外部晶体/时钟,常温下内部R/C振荡器频率为:5.0V单片机为:11MHz~15.5MHz,3.3V单片机为:8MHz~12MHz,精度要求不高时,可选择使用内部时钟,但因为有制造误差和温漂,以实际测试为准;13.共4个16位定时器两个与传统8051兼容的定时器/计数器,16位定时器T0和T1,没有定时器2,但有独立波特率发生器做串行通讯的波特率发生器再加上2路PCA模块可再实现2个16位定时器;14. 2个时钟输出口,可由T0的溢出在P3.4/T0输出时钟,可由T1的溢出在P3.5/T1输出时钟;15.外部中断I/O口7路,传统的下降沿中断或低电平触发中断,并新增支持上升沿中断的PCA模块, Power Down模式可由外部中断唤醒,INT0/P3.2,INT1/P3.3,T0/P3.4, T1/P3.5, RxD/P3.0,CCP0/P1.3(也可通过寄存器设置到P4.2 ), CCP1/P1.4 (也可通过寄存器设置到P4.3);16. PWM(2路)/PCA(可编程计数器阵列,2路):——也可用来当2路D/A使用——也可用来再实现2个定时器——也可用来再实现2个外部中断(上升沿中断/下降沿中断均可分别或同时支持);17.A/D转换, 10位精度ADC,共8路,转换速度可达250K/S(每秒钟25万次)18.通用全双工异步串行口(UART),由于STC12系列是高速的8051,可再用定时器或PCA软件实现多串口;19. STC12C5A60S2系列有双串口,后缀有S2标志的才有双串口,RxD2/P1.2(可通过寄存器设置到P4.2),TxD2/P1.3(可通过寄存器设置到P4.3);20.工作温度范围:-40 - +85℃(工业级) / 0 - 75℃(商业级)21.封装:PDIP-40,LQFP-44,LQFP-48 I/O口不够时,可用2到3根普通I/O口线外接74HC164/165/595(均可级联)来扩展I/O口, 还可用A/D做按键扫描来节省I/O口,或用双CPU,三线通信,还多了串口。
高性能单时钟指令周期STC12C5A60S2系列单片机简介高性能单时钟指令周期STC12C5A60S2系列单片机简介STC12C5A60S2/AD/PWM系列单片机是STC生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S,即25万次/秒),针对电机控制,强干扰场合。
1.增强型8051 CPU,1T,单时钟/机器周期,指令代码完全兼容传统80512.工作电压:STC12C5A60S2系列工作电压:5.5V - 3.5V (5V单片机)STC12LE5A60S2系列工作电压:3.6V - 2.2V (3V单片机)3.工作频率范围:0~35MHz,相当于普通8051的0~420MHz4.用户应用程序空间8K /16K / 20K / 32K / 40K / 48K / 52K / 60K / 62K 字节......5.片上集成1280字节RAM6.通用I/O口(36/40/44个),复位后为:准双向口/弱上拉(普通8051传统I/O口)可设置成四种模式:准双向口/弱上拉,强推挽/强上拉,仅为输入/高阻,开漏每个I/O口驱动能力均可达到20mA,但整个芯片最大不要超过120mA7. ISP (在系统可编程)/ IAP (在应用可编程),无需专用编程器,无需专用仿真器可通过串口(P3.0/P3.1)直接下载用户程序,数秒即可完成一片8.有EEPROM功能(STC12C5A62S2/AD/PWM无内部EEPROM)9.看门狗10.内部集成MAX810专用复位电路(外部晶体12M以下时,复位脚可直接1K电阻到地)11.外部掉电检测电路:在P4. 6口有一个低压门槛比较器5V单片机为1.33V,误差为±5%,3.3V单片机为1.31V,误差为±3%12.时钟源:外部高精度晶体/时钟,内部R/C振荡器(温漂为±5%到±10%以内)用户在下载用户程序时,可选择是使用内部R/C振荡器还是外部晶体/时钟常温下内部R/C振荡器频率为:5. 0V单片机为:11MHz~17MHz3. 3V单片机为:8MHz~12MHz 精度要求不高时,可选择使用内部时钟,但因为有制造误差和温漂,以实际测试为准13.共4个16位定时器两个与传统8051兼容的定时器/计数器,16位定时器T0和T1,没有定时器2,但有独立波特率发生器做串行通讯的波特率发生器,再加上2路PCA模块可再实现2个16位定时器14. 3个时钟输出口,可由T0的溢出在P3.4/T0输出时钟,可由n的溢出在P3. 5/T1输出时钟,独立波特率发生器可以在P1. 0口输出时钟15.夕卜部中断I/O口7路,传统的下降沿中断或低电平触发中断,并新增支持上升沿中断的PCA模块,Power Down模式可由外部中断唤醒,INT0/P3.2,INT1/P3.3,T0/P3.4, T1/P3.5, RxD/P3.0,CCP0/P1.3 (也可通过寄存器设置到P4. 2), CCP1/P1.4他可通过寄存器设置到P4. 3)16. PWM(2路)/ PCA (可编程计数器阵列,2路)---也可用来当2路D/A使用 ---也可用来再实现2个定时器---也可用来再实现2个外部中断(上升沿中断/下降沿中断均可分别或同时支持)17. A/D转换,10位精度ADC,共8路,转换速度可达250K/S(每秒钟25万次)18.通用全双工异步串行口(UART),由于STC12系列是高速的8051,可再用定时器或PCA软件实现多串口19. STC12C5A60S2系列有双串口,后缀有S2标志的才有双串口,RxD2/P1.2(可通过寄存器设置到P4.2),TxD2/P1.3 (可通过寄存器设置到P4.3)20.工作温度范围:-40 ~ +85 °C (工业级)/ 0 ~ 75 °C (商业级)21.封装:LQFP-48, LQFP-44, PDIP-40, PLCC-44, QFN-40I/O 口不够时,可用2到3根普通I/O 口线外接74HC164/165/595 (均可级联)来扩展I/O 口,还可用A/D做按键扫描来节省I/O 口,或用双CPU,三线通信,还多了串口。
STC12C5A60S2单片机双串口通信STC12C5A60S2单片机是一款功能比较强大的单片机,它拥有两个全双工串行通信接口,串口1的功能及操作与传统51单片机串行口相同;特殊的是STC12C5A60S2单片机内部有一个独立波特率发生器,串口1可以使用定时器1作为波特率发生器,也可以使用独立波特率发生器作为波特率发生器;而串口2只能使用独立波特率发生器作为波特率发生器。
下面是一段双串口通信的程序:/************************************************ ***********************时间:2012.11.24芯片:STC12C5A60S2晶振:22.1184MHz 波特率:9600bps引脚定义:串行口1:发送————TxD/P3.1;接收————RxD/P3.0串行口2:发送————TxD2/P1.3;接收————RxD2/P1.2功能描述:STC12双串口通信(中断方式)当串行口1接收数据后,将此数据由串行口2发送出去当串行口2接收数据后,将此数据由串行口1发送出去************************************************* **********************/#include;#define S2RI 0x01//串口2接收中断请求标志位#define S2TI 0x02//串口2发送中断请求标志位unsigned char flag1,flag2,temp1,temp2;/****************串行口初始化函数****************/void InitUART(void){TMOD = 0x20; //定时器1工作在方式2 8位自动重装SCON = 0x50; //串口1工作在方式1 10位异步收发 REN=1允许接收TH1 = 0xFA; //定时器1初值TL1 = TH1;TR1 = 1; //定时器1开始计数EA =1;//开总中断ES =1;//开串口1中断S2CON = 0x50; //串口2工作在方式1 10位异步收发 S2REN=1允许接收BRT = 0xFA; //独立波特率发生器初值AUXR = 0x10; //BRTR=1 独立波特率发生器开始计数IE2 =0x01;//开串口2中断 ES2=1}/****************串行口1发送****************/ void UART_1SendOneByte(unsigned char c){SBUF = c;while(!TI); //若TI=0,在此等待TI = 0;}/****************串行口2发送****************/ void UART_2SendOneByte(unsigned char c){S2BUF = c;while(!(S2CON&S2TI)); //若S2TI=0,在此等待 S2CON&=~S2TI; //S2TI=0}/*****************主函数******************/ void main(void){InitUART();//串行口初始化while(1){//如果串口1接收到数据,将此数据由串口2发送if(flag1==1){flag1=0;UART_2SendOneByte(temp1);}//如果串口2接收到数据,将此数据由串口1发送if(flag2==1){flag2=0;UART_1SendOneByte(temp2);}}}/************串行口1中断处理函数*************/ void UART_1Interrupt(void) interrupt 4{if(RI==1){RI=0;flag1=1;temp1=SBUF;}}/************串行口2中断处理函数*************/ void UART_2Interrupt(void) interrupt 8{if(S2CON&S2RI){S2CON&=~S2RI;flag2=1;temp2=S2BUF;}}12C5A60S2.h的头文件如下://--------------------------------------------------------------------------------//新一代 1T 8051系列单片机内核特殊功能寄存器 C51Core SFRs// 7 6 5 4 3 2 1 0Reset Valuesfr ACC = 0xE0; //Accumulator 0000,0000sfr B = 0xF0; //B Register 0000,0000sfr PSW = 0xD0; //Program Status Word CY AC F0 RS1 RS0 OV F1 P 0000,0000//-----------------------------------sbit CY = PSW^7;sbit AC = PSW^6;sbit F0 = PSW^5;sbit RS1 = PSW^4;sbit RS0 = PSW^3;sbit OV = PSW^2;sbit P = PSW^0;//-----------------------------------sfr SP = 0x81; //Stack Pointer 0000,0111sfr DPL = 0x82; //Data Pointer Low Byte0000,0000sfr DPH = 0x83; //Data Pointer High Byte0000,0000//--------------------------------------------------------------------------------//新一代 1T 8051系列单片机系统管理特殊功能寄存器// 7 6 5 4 3 2 1 0 Reset Valuesfr PCON = 0x87; //Power Control SMOD SMOD0 LVDF POF GF1 GF0 PD IDL 0001,0000// 7 6 5 4 3 2 1 0Reset Valuesfr AUXR = 0x8E; //Auxiliary Register T0x12 T1x12 UART_M0x6 BRTR S2SMOD BRTx12 EXTRAM S1BRS0000,0000//-----------------------------------sfr AUXR1 = 0xA2; //Auxiliary Register 1 - PCA_P4 SPI_P4 S2_P4 GF2 ADRJ - DPS 0000,0000 /*PCA_P4:0, 缺省PCA 在P1 口1,PCA/PWM 从P1 口切换到P4 口: ECI 从P1.2 切换到P4.1 口,PCA0/PWM0 从P1.3 切换到P4.2 口PCA1/PWM1 从P1.4 切换到P4.3 口SPI_P4:0, 缺省SPI 在P1 口1,SPI 从P1 口切换到P4 口: SPICLK 从P1.7 切换到P4.3 口MISO 从P1.6 切换到P4.2 口MOSI 从P1.5 切换到P4.1 口SS 从P1.4 切换到P4.0 口S2_P4:0, 缺省UART2 在P1 口1,UART2 从P1 口切换到P4 口: TxD2 从P1.3 切换到P4.3 口RxD2 从P1.2 切换到P4.2 口GF2: 通用标志位ADRJ:0, 10 位A/D 转换结果的高8 位放在ADC_RES 寄存器, 低2 位放在ADC_RESL 寄存器1,10 位A/D 转换结果的最高2 位放在ADC_RES 寄存器的低2 位, 低8 位放在ADC_RESL 寄存器DPS: 0, 使用缺省数据指针DPTR01,使用另一个数据指针DPTR1*///-----------------------------------sfr WAKE_CLKO = 0x8F; //附加的 SFR WAK1_CLKO/*7 6 5 4 3 2 1 0 Reset ValuePCAWAKEUP RXD_PIN_IE T1_PIN_IE T0_PIN_IELVD_WAKE _ T1CLKO T0CLKO 0000,0000Bb7 - PCAWAKEUP : PCA 中断可唤醒 powerdown。
b6 - RXD_PIN_IE : 当 P3.0(RXD) 下降沿置位 RI 时可唤醒 powerdown(必须打开相应中断)。
b5 - T1_PIN_IE : 当 T1 脚下降沿置位 T1 中断标志时可唤醒 powerdown(必须打开相应中断)。
b4 - T0_PIN_IE : 当 T0 脚下降沿置位 T0 中断标志时可唤醒 powerdown(必须打开相应中断)。
b3 - LVD_WAKE : 当 CMPIN 脚低电平置位 LVD 中断标志时可唤醒 powerdown(必须打开相应中断)。
b2 -b1 - T1CLKO : 允许 T1CKO(P3.5) 脚输出 T1 溢出脉冲,Fck1 = 1/2 T1 溢出率b0 - T0CLKO : 允许 T0CKO(P3.4) 脚输出 T0 溢出脉冲,Fck0 = 1/2 T1 溢出率*///-----------------------------------sfr CLK_DIV = 0x97; //Clock Divder - - -- - CLKS2 CLKS1 CLKS0 xxxx,x000//-----------------------------------sfr BUS_SPEED = 0xA1; //Stretch register - - ALES1 ALES0 - RWS2 RWS1 RWS0 xx10,x011/*ALES1 and ALES0:00 : The P0 address setup time and hold time to ALE negative edge is one clock cycle01 : The P0 address setup time and hold time to ALE negative edge is two clock cycles.10 : The P0 address setup time and hold time to ALE negative edge is three clock cycles. (default)11 : The P0 address setup time and hold time to ALE negative edge is four clock cycles.RWS2,RWS1,RWS0:000 : The MOVX read/write pulse is 1 clock cycle. 001 : The MOVX read/write pulse is 2 clock cycles. 010 : The MOVX read/write pulse is 3 clock cycles. 011 : The MOVX read/write pulse is 4 clock cycles. (default)100 : The MOVX read/write pulse is 5 clock cycles. 101 : The MOVX read/write pulse is 6 clock cycles.110 : The MOVX read/write pulse is 7 clock cycles. 111 : The MOVX read/write pulse is 8 clock cycles. *///--------------------------------------------------------------------------------//新一代 1T 8051系列单片机中断特殊功能寄存器//有的中断控制、中断标志位散布在其它特殊功能寄存器中,这些位在位地址中定义//其中有的位无位寻址能力,请参阅新一代 1T 8051系列单片机中文指南// 7 6 5 4 3 2 1 0Reset Valuesfr IE = 0xA8; //中断控制寄存器 EA ELVD EADC ES ET1 EX1 ET0 EX0 0x00,0000//-----------------------sbit EA = IE^7;sbit ELVD = IE^6; //低压监测中断允许位sbit EADC = IE^5; //ADC 中断允许位sbit ES = IE^4;sbit ET1 = IE^3;sbit EX1 = IE^2;sbit ET0 = IE^1;sbit EX0 = IE^0;//-----------------------sfr IE2 = 0xAF; //Auxiliary Interrupt - - - - - - ESPI ES2 0000,0000B//-----------------------// 7 6 5 4 3 2 1 0Reset Valuesfr IP = 0xB8; //中断优先级低位 PPCA PLVD PADC PS PT1 PX1 PT0 PX0 0000,0000//--------sbit PPCA = IP^7; //PCA 模块中断优先级sbit PLVD = IP^6; //低压监测中断优先级sbit PADC = IP^5; //ADC 中断优先级sbit PS = IP^4;sbit PT1 = IP^3;sbit PX1 = IP^2;sbit PT0 = IP^1;sbit PX0 = IP^0;//-----------------------// 7 6 5 4 3 2 1 0Reset Valuesfr IPH = 0xB7; //中断优先级高位 PPCAH PLVDHPADCH PSH PT1H PX1H PT0H PX0H 0000,0000sfr IP2 = 0xB5; // - - - - - - PSPI PS2 xxxx,xx00sfr IPH2 = 0xB6; // - - - - - - PSPIH PS2H xxxx,xx00//-----------------------//新一代 1T 8051系列单片机I/O 口特殊功能寄存器// 7 6 5 4 3 2 1 0Reset Valuesfr P0 = 0x80; //8 bitPort0 P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0 1111,1111sfr P0M0 = 0x94; // 0000,0000sfr P0M1 = 0x93; // 0000,0000sfr P1 = 0x90; //8 bitPort1 P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0 1111,1111sfr P1M0 = 0x92; // 0000,0000sfr P1M1 = 0x91; // 0000,0000sfr P1ASF = 0x9D; //P1 analog special functionsfr P2 = 0xA0; //8 bitPort2 P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 1111,1111sfr P2M0 = 0x96; // 0000,0000sfr P2M1 = 0x95; // 0000,0000sfr P3 = 0xB0; //8 bitPort3 P3.7 P3.6 P3.5P3.4 P3.3 P3.2 P3.1 P3.0 1111,1111sfr P3M0 = 0xB2; // 0000,0000sfr P3M1 = 0xB1; // 0000,0000sfr P4 = 0xC0; //8 bitPort4 P4.7 P4.6 P4.5P4.4 P4.3 P4.2 P4.1 P4.0 1111,1111sfr P4M0 = 0xB4; // 0000,0000sfr P4M1 = 0xB3; // 0000,0000// 7 6 5 4 3 2 1 0Reset Valuesfr P4SW = 0xBB; //Port-4 switch - LVD_P4.6 ALE_P4.5 NA_P4.4 - - - - x000,xxxxsfr P5 = 0xC8; //8 bitPort5 - - - - P5.3 P5.2 P5.1 P5.0 xxxx,1111sfr P5M0 = 0xCA; // 0000,0000sfr P5M1 = 0xC9; // 0000,0000//--------------------------------------------------------------------------------//新一代 1T 8051系列单片机定时器特殊功能寄存器// 7 6 5 4 3 2 1 0Reset Valuesfr TCON = 0x88; //T0/T1 Control TF1 TR1 TF0TR0 IE1 IT1 IE0 IT0 0000,0000//-----------------------------------sbit TF1 = TCON^7;sbit TR1 = TCON^6;sbit TF0 = TCON^5;sbit TR0 = TCON^4;sbit IE1 = TCON^3;sbit IT1 = TCON^2;sbit IE0 = TCON^1;sbit IT0 = TCON^0;//-----------------------------------sfr TMOD = 0x89; //T0/T1 Modes GATE1 C/T1 M1_1 M1_0 GATE0 C/T0 M0_1 M0_0 0000,0000sfr TL0 = 0x8A; //T0 Low Byte 0000,0000sfr TH0 = 0x8C; //T0 High Byte 0000,0000sfr TL1 = 0x8B; //T1 Low Byte 0000,0000sfr TH1 = 0x8D; //T1 High Byte 0000,0000//--------------------------------------------------------------------------------//新一代 1T 8051系列单片机串行口特殊功能寄存器// 7 6 5 4 3 2 1 0 Reset Valuesfr SCON = 0x98; //Serial Control SM0/FE SM1 SM2 REN TB8 RB8 TI RI 0000,0000//-----------------------------------sbit SM0 = SCON^7; //SM0/FEsbit SM1 = SCON^6;sbit SM2 = SCON^5;sbit REN = SCON^4;sbit TB8 = SCON^3;sbit RB8 = SCON^2;sbit TI = SCON^1;sbit RI = SCON^0;//-----------------------------------sfr SBUF = 0x99; //Serial Data Buffer xxxx,xxxx sfr SADEN = 0xB9; //Slave Address Mask 0000,0000 sfr SADDR = 0xA9; //Slave Address 0000,0000//-----------------------------------// 7 6 5 4 3 2 1 0 Reset Valuesfr S2CON = 0x9A; //S2 Control S2SM0 S2SM1 S2SM2 S2REN S2TB8 S2RB8 S2TI S2RI 00000000Bsfr S2BUF = 0x9B; //S2 Serial Buffer xxxx,xxxx sfr BRT = 0x9C; //S2 Baud-Rate Timer 0000,0000//--------------------------------------------------------------------------------//新一代 1T 8051系列单片机看门狗定时器特殊功能寄存器sfr WDT_CONTR = 0xC1; //Watch-Dog-Timer Control register// 7 6 5 4 3 2 1 0 Reset Value// WDT_FLAG - EN_WDT CLR_WDT IDLE_WDT PS2 PS1 PS0 xx00,0000//-----------------------//--------------------------------------------------------------------------------//新一代 1T 8051系列单片机PCA/PWM 特殊功能寄存器// 7 6 5 4 3 2 1 0 Reset Valuesfr CCON = 0xD8; //PCA 控制寄存器。