(完整版)红外感应原理知识
- 格式:doc
- 大小:275.01 KB
- 文档页数:4
红外线感应工作原理红外线感应技术是一种常见的非接触式感应技术,广泛应用于安防、自动化控制以及电子产品中。
它通过感应人体活动所产生的红外线辐射来实现自动化控制和侦测。
一、红外线的概念与特性红外线是电磁波的一种,波长长于可见光,频率低于红色光线。
它在可见光谱的红色一侧,故被称为"红外线"。
红外线具有以下特性:1. 红外线可以穿透一些透明物体,如玻璃和塑料;2. 红外线可以通过大气层传递,在室外使用也是可行的;3. 红外线的辐射能量不足以对人体或大多数物体造成伤害。
二、红外线感应原理红外线感应技术一般分为主动式和被动式两种。
主动式红外线感应技术是通过发射红外线光束并检测其是否被遮挡来实现,通常应用于测距和避障等功能。
被动式红外线感应技术是通过感应人体活动所产生的红外线辐射来实现,广泛应用于人体感应报警系统和自动照明系统等。
被动式红外线感应技术的工作原理如下:1. 红外线感应传感器:感应器内部装有红外线探测器,它能够感应到人体所产生的红外线辐射。
2. 探测范围的设定:感应器可以根据需要设定感应范围,通常通过调节感应器的焦点来改变感应范围。
3. 红外线辐射检测:当有人或物体进入感应器的监测范围内时,感应器会检测到红外线辐射的变化,并通过内部的电路进行处理。
4. 信号输出:根据感应器的设计,当检测到红外线辐射变化时,感应器会输出一个信号,常见的有开关信号、电压信号或频率信号。
5. 控制应用:通过接受感应器的信号,控制相应的设备或系统进行操作,比如报警、开关灯等。
三、红外线感应技术的应用1. 安防领域:红外线感应技术已广泛应用于家庭和商业建筑的入侵报警系统中。
当有人进入被保护区域时,红外线感应器会感应到人体的热辐射并触发报警装置。
2. 自动照明系统:红外线感应技术还可以应用于自动照明系统中。
当有人接近时,感应器检测到红外线信号变化,触发灯光自动亮起,从而提高照明效果和节约能源。
3. 自动化控制:红外线感应技术也可以用于家居自动化控制系统,如自动开启门窗、自动调节空调温度等。
红外感应的原理
红外感应是一种通过红外线来判断物体是否存在的感应技术。
其原理是:当人或物体进入感应区时,感应区的红外线被反射,
根据反射的光的强弱来判断是否有物体进入感应区,从而达到判
断物体存在的目的。
当人或物体进入红外线反射范围内时,红外线被反射到接收
器上,接收器再将此信息送到微处理器进行分析,从而判断出物
体是否存在。
红外线是一种可见光。
它是由三个基本颜色组成:红、橙、黄、绿。
不同颜色的光线被吸收或发射后,形成的颜色不同,而
产生不同的光强变化。
通过对红外线的研究发现:红外光是一种
不可见光,波长介于可见光与红外线之间。
在所有可见光中,只
有红外线可以穿过人体组织。
人体组织中含有大量的水分子和空
气分子。
当人或物体进入人体时,这些分子会发生震动并产生热量,同时将能量传递给人体组织中的细胞。
由于人或物体发射出
来的能量与它所含水分、氧气和二氧化碳的比例有关,因此就产
生了热量。
人或物体表面温度越高,其红外辐射能量就越强。
—— 1 —1 —。
红外线传感器的工作原理红外线传感器是一种能够感知红外线辐射并将其转化成电信号的设备。
它广泛应用于无人机导航、安防系统、人体检测等领域。
本文将介绍红外线传感器的工作原理及其应用。
一、工作原理红外线传感器基于材料的电磁特性,利用红外线辐射与物体之间的相互作用,实现对红外线的探测。
其工作原理主要涉及热辐射、红外敏感材料和电信号转化。
1. 热辐射物体的热辐射是指在一定温度下,物体所发出的能量辐射。
根据斯特藩-玻尔兹曼定律,热辐射功率与物体的温度的四次方成正比。
因此,通过测量红外线接收器接收到的热辐射功率,可以间接测量物体的温度.2. 红外敏感材料红外线传感器的核心部件是红外敏感材料,其具有较高的红外辐射吸收能力。
常见的红外敏感材料有硫化镉、硫化铟等。
这些材料能够将红外辐射吸收后,产生电荷分离,并产生相应的电信号。
3. 电信号转化红外敏感材料吸收红外辐射后,会产生电信号。
这些电信号通过传感器内部的电路进行放大和过滤,然后转化成可以被控制器或处理器读取的电压信号。
控制器或处理器通过读取电压信号的大小,可以判断红外线的强度,从而实现对物体的探测。
二、应用领域1. 无人机导航红外线传感器在无人机导航中起到关键作用。
通过安装红外线传感器,无人机可以准确感知周围的障碍物、地形变化等,并将这些信息传递给控制系统,以实现自主飞行和避障。
2. 安防系统红外线传感器被广泛应用于安防系统中,用于检测人体的活动。
当有人进入安装有红外线传感器的区域时,传感器会感知到人体发出的红外辐射,从而触发报警系统。
这种应用能够在一定程度上提高安防系统的准确性和可靠性。
3. 温度测量红外线传感器还可以用于非接触式温度测量。
由于红外辐射与物体温度相关,所以通过测量红外线辐射能量的大小,可以获得物体的表面温度。
这种测量方式非常适用于高温或无法直接接触的环境,例如火山喷发监测、工业生产等领域。
4. 自动化控制红外线传感器也被广泛应用于自动化控制系统中,例如自动门、自动马桶等。
红外传感器的基本原理
红外传感器的基本原理:
①红外辐射属于电磁波谱一部分波长范围覆盖0.75至1000微米之间自然界中所有温度高于绝对零度物体都会发出红外线;
②红外传感器设计原理基于对这一不可见光谱段能量检测与转换利用半导体材料光电效应将接收到红外辐射转变为电信号输出;
③典型应用领域包括温度测量非接触式开关气体分析安防监控等领域通过感知环境中红外辐射变化实现自动化智能化控制;
④热释电型红外传感器依靠温度变化产生电动势工作时需保持器件自身温度恒定当外界红外辐射引起局部温升时产生电流;
⑤光电导型器件如硫化铅锑化铟等材料在红外光照射下导电率发生变化由此导致电路中电流或电压波动用于检测辐射强度;
⑥光伏型红外探测器内部形成PN结当入射红外光子能量大于等于禁带宽度时激发电子跃迁产生光生载流子形成短路电流;
⑦热敏电阻热电偶等基于温度敏感元件在受到红外辐射加热后电阻值或热电动势发生变化原理制成适用于低成本场合;
⑧集成电路形式将敏感元件信号处理放大电路集成于一体简化外部连接提高稳定性常见于消费电子产品中;
⑨应用实例中红外测温枪通过接收人体发射红外辐射计算出表面温度无需接触即可快速筛查发热个体适用于公共卫生防疫;
⑩红外遥控器与接收模块组合实现远距离无线控制家电设备利用编码调制技术发送指令序列由接收端解码执行对应操作;
⑪工业生产线上在线检测装置利用红外传感器监测产品表面温度变化判断固化程度调整工艺参数提高产品质量一致性;
⑫安防系统中被动红外探测器安装于门窗等易入侵位置监测是否有移动热源进入设定警戒区触发报警提醒注意安全。
红外线传感器的工作原理红外线传感器是一种常见的电子设备,用于检测和感应周围环境中的红外线信号。
它广泛应用于安防系统、自动化控制、家用电器、机器人等领域。
本文将介绍红外线传感器的工作原理及其应用。
一、红外线传感器的基本原理红外线是一种电磁波,其波长范围大致在0.75至1000微米之间。
红外线传感器利用物体在特定波长范围内的热辐射来感知物体的存在和位置。
一般来说,红外线传感器包括发射器和接收器两部分。
1. 发射器:发射器通常使用红外二极管,以频率为大约38kHz的脉冲信号作为源发射红外线。
红外线发射器将电能转化为红外线能量,并向周围环境发射红外线信号。
2. 接收器:接收器通常使用光电二极管或红外线传感器芯片,用于接收从物体反射回来的红外线信号。
当红外线信号照射到接收器上时,光电二极管或红外线传感器芯片将其转换为电能信号。
二、红外线传感器的工作过程红外线传感器的工作过程可以总结为以下几个步骤:1. 发射红外线信号:红外线传感器中的发射器产生一个特定频率的脉冲信号,将电能转化为红外线信号。
这些红外线信号以一定的范围散射到周围环境中。
2. 接收红外线信号:接收器接收周围环境中反射回来的红外线信号。
当有物体进入传感器的感应范围内时,物体会反射一部分红外线信号,并被接收器接收到。
3. 转换为电信号:接收器中的光电二极管或红外线传感器芯片将接收到的红外线信号转换为相应的电信号。
信号的强度和频率将被转化为电压或频率的变化。
4. 预处理和信号处理:接收到的电信号将进一步进行预处理,如放大、滤波和去噪。
然后,信号经过处理电路进行分析和解码。
5. 结果输出:最终,红外线传感器将根据所接收到的信号进行输出。
根据不同的应用需求,输出信号可以是模拟信号或数字信号。
三、红外线传感器的应用领域红外线传感器凭借其便捷、高效和可靠的特性,在许多领域得到了广泛应用。
1. 安防系统:红外线传感器被广泛应用于安防系统,用于检测人体或其他物体的存在。
红外传感器的原理
一、红外传感器的原理
1、什么是红外传感器
红外传感器是一种利用“热”原理,能够检测周围环境中物体温度和红外能量的传感器。
它能够清楚地探测到温度和红外辐射,通常用于各种机器人和导航系统。
2、红外传感器的工作原理
红外传感器具有良好的灵敏度,能够有效地检测到周围环境中物体的温度和红外辐射。
红外传感器的工作原理是,物体中的温度和红外辐射被探测器感应,然后转换成电信号输出,最终根据电信号的强弱来处理外部环境的信息。
3、红外传感器的特点
红外传感器具有良好的灵敏度,可以探测到物体的温度和红外辐射,并能够精确地检测到小变化的温度。
另外,红外传感器可以用于夜晚的环境检测,因为它可以检测到红外辐射,而不受光强度的影响。
此外,由于红外传感器具有低功耗、精确度高、安装方便等优点,多用于飞行器、机器人、工业自动化系统等的环境检测和导航系统。
4、红外传感器的应用
红外传感器的主要应用领域有:
(1)飞行器环境检测:利用红外传感器能够准确地检测到周围环境的热源,从而控制飞行器的安全性和性能。
(2)机器人环境检测:利用红外传感器能够准确地检测到周围
环境中物体的温度和红外辐射,有效地为机器人的行为提供参考。
(3)导航系统:红外传感器能够检测到红外辐射,多用于夜间的导航系统,以便有效地定位和跟踪。
红外线传感器工作原理红外线传感器是一种常见的电子元件,广泛应用于安防、智能家居、机器人等领域。
它通过感知和接收红外线辐射来实现物体检测和距离测量。
本文将介绍红外线传感器的工作原理,以及其在实际应用中的作用。
一、红外线的概述红外线是一种电磁辐射,它的波长范围在可见光和微波之间。
与可见光不同,人眼无法直接感知红外线,但它的能量仍然可以被物体吸收和辐射。
红外线具有很强的穿透力,可以在一定范围内穿透透明材料如玻璃和塑料。
二、红外线传感器的组成红外线传感器通常由发射器和接收器两部分组成。
发射器负责发射红外线辐射,而接收器则接收这些辐射并进行信号处理。
1. 发射器红外线传感器的发射器通常由红外发光二极管(IR LED)构成。
当发射器受到电流驱动时,它会发出红外线信号,并将其辐射到周围环境中。
2. 接收器红外线传感器的接收器通常由一种叫做红外光敏二极管(IR photodiode)的元件构成。
接收器对红外线辐射非常敏感,当接收到红外线信号时,会产生电流变化的响应。
这个电流变化可以被放大和处理,以产生与探测目标相关的输出信号。
三、红外线传感器的工作原理红外线传感器利用物体对红外线的吸收和辐射特性来实现目标检测和测量。
接下来将详细介绍红外线传感器的工作原理。
1. 目标检测当发射器发出红外线信号后,这些信号会被周围的物体吸收或反射。
如果有目标物体出现在传感器的感知范围内,该物体会吸收或反射一部分红外线信号,并将其反射回传感器面前的接收器。
2. 信号检测接收器接收到反射回来的红外线信号后,会产生一个电流变化的响应。
这个响应可以通过电路放大,并经过滤波和去噪等处理,以消除干扰。
3. 信号处理经过电路处理后的信号,可以被转换为数字信号或模拟信号,用于接收到的红外线信号的解析和输出。
这样,我们可以获得与目标物体相关的信息,如距离、位置等。
四、红外线传感器的应用红外线传感器由于其灵敏度高、反应速度快、成本低等优点,在多个领域得到广泛应用。
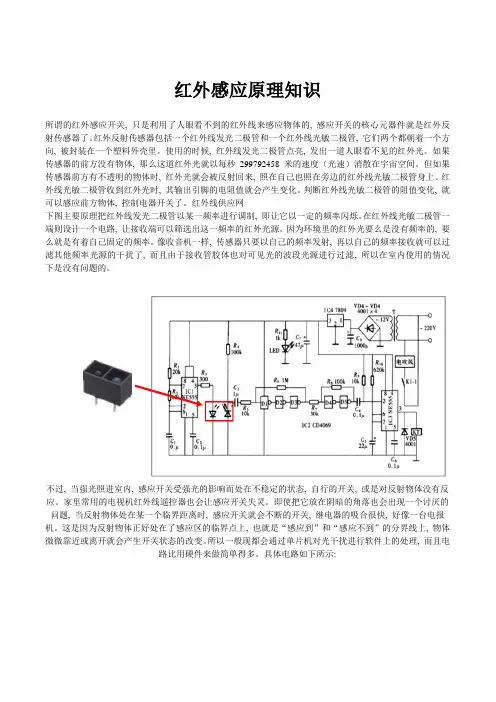
红外感应原理知识所谓的红外感应开关, 只是利用了人眼看不到的红外线来感应物体的, 感应开关的核心元器件就是红外反射传感器了。
红外反射传感器包括一个红外线发光二极管和一个红外线光敏二极管, 它们两个都朝着一个方向, 被封装在一个塑料外壳里。
使用的时候, 红外线发光二极管点亮, 发出一道人眼看不见的红外光。
如果传感器的前方没有物体, 那么这道红外光就以每秒299792458 米的速度(光速)消散在宇宙空间。
但如果传感器前方有不透明的物体时, 红外光就会被反射回来, 照在自己也照在旁边的红外线光敏二极管身上。
红外线光敏二极管收到红外光时, 其输出引脚的电阻值就会产生变化。
判断红外线光敏二极管的阻值变化, 就可以感应前方物体, 控制电器开关了。
红外线供应网下图主要原理把红外线发光二极管以某一频率进行调制, 即让它以一定的频率闪烁。
在红外线光敏二极管一端则设计一个电路, 让接收端可以筛选出这一频率的红外光源。
因为环境里的红外光要么是没有频率的, 要么就是有着自己固定的频率。
像收音机一样, 传感器只要以自己的频率发射, 再以自己的频率接收就可以过滤其他频率光源的干扰了, 而且由于接收管胶体也对可见光的波段光源进行过滤, 所以在室内使用的情况下是没有问题的。
不过, 当强光照进室内, 感应开关受强光的影响而处在不稳定的状态, 自行的开关, 或是对反射物体没有反应。
家里常用的电视机红外线遥控器也会让感应开关失灵。
即使把它放在阴暗的角落也会出现一个讨厌的问题, 当反射物体处在某一个临界距离时, 感应开关就会不断的开关, 继电器的吸合很快, 好像一台电报机。
这是因为反射物体正好处在了感应区的临界点上, 也就是“感应到”和“感应不到”的分界线上, 物体微微靠近或离开就会产生开关状态的改变。
所以一般现都会通过单片机对光干扰进行软件上的处理, 而且电路比用硬件来做简单得多。
具体电路如下所示:对于设计中存在的一些问题:1.如何去除环境光的干扰?与之前的硬件调制解调的方式不同, 在使用ADC 功能之后, 另一种解决方案会让测试更有效率。
红外感应原理
红外感应是一种利用物体发射和反射的红外辐射来检测目标物体的技术。
它主要基于以下原理:
1. 红外辐射:物体在温度高于绝对零度时,会发射红外辐射。
这种辐射的波长范围通常在0.75μm至1000μm之间,称为红外光谱。
红外辐射的能量与物体的温度成正比。
2. 反射与吸收:当红外辐射照射到物体表面时,物体会发生反射和吸收。
不同材质的物体对红外光的反射和吸收特性不同,因此红外辐射的变化可以用来判断物体的特性。
3. 红外探测器:红外感应技术使用红外探测器来接收和转换目标物体发射的红外辐射。
红外探测器通常包括红外感光元件和信号处理电路。
红外感光元件能够将红外辐射转换为电信号,并通过信号处理电路进行放大和处理。
4. 感应原理:一般来说,当一个物体进入红外感应器的感应范围时,物体会发射出红外辐射。
红外探测器可以检测到目标物体的红外辐射信号,并通过信号处理电路进行分析和判断。
一旦检测到目标物体的红外辐射变化,红外感应器会输出一个相应的信号,触发相应的动作。
红外感应技术在人体检测、安防监控、自动门控制等领域得到了广泛应用。
它通过无线电传输和计算机控制,可以实现对目标物体的实时监测和追踪,具有高灵敏度、高精度和快速响应的特点。
红外传感器的工作原理红外传感器是一种能够感知并测量红外辐射的设备,广泛应用于电子产品、自动化控制和安防系统等领域。
它的工作原理基于物体在热能上的差异,通过捕捉和解析物体发出的红外辐射来实现检测功能。
本文将详细介绍红外传感器的工作原理及其应用。
一、红外辐射的特点红外辐射是一种电磁辐射,其波长范围在0.75微米至1000微米之间,超出了人类眼睛可见光的波长范围。
物体产生红外辐射的原因是其温度超过了绝对零度,即使是室温下的物体也会具有一定的红外辐射能量。
红外辐射的强弱与物体温度成正比,温度越高辐射能量越大。
二、红外传感器的构成红外传感器主要由发射器、接收器和信号处理电路组成。
发射器产生红外辐射,接收器接收来自目标物体的红外辐射,并将其转化为电信号,信号处理电路对接收到的信号进行放大、滤波和解析等操作。
三、红外传感器的工作原理红外传感器的工作原理主要基于两种技术:被动红外(PIR)和主动红外(PA)。
下面将分别介绍这两种工作原理。
1. 被动红外(PIR)被动红外技术是基于物体的热能差异来进行检测的。
被动红外传感器包含一个或多个热敏元件,通常是红外感应器。
当有物体靠近传感器时,物体的红外辐射会改变传感器的温度分布,从而产生一个由电流变化所引起的电信号。
传感器会检测到这个变化并作出相应的响应,例如触发警报或控制其他设备。
2. 主动红外(PA)主动红外技术是通过系统主动发射红外辐射来进行检测的。
主动红外传感器一般包含发射器和接收器两部分。
发射器发射红外辐射,接收器接收从目标物体反射回来的红外辐射。
当目标物体接近传感器时,接收器接收到的反射红外辐射会发生变化。
传感器通过检测反射红外辐射的强度和频率变化来判断目标物体的位置和状态。
四、红外传感器的应用红外传感器在各个领域都有广泛的应用。
1. 安防系统红外传感器被广泛用于安防系统中,例如入侵报警系统和监控摄像机。
通过安装红外传感器,可以及时检测到人体或其他物体的活动或入侵行为。
红外线传感器的原理及应用红外线传感器是一种基于红外线辐射特性的电子设备,能够感知和测量物体散射、反射、发射的红外线辐射能量。
它在许多领域有着广泛的应用,包括安防监控、智能家居、机器人技术等。
本文将详细介绍红外线传感器的工作原理以及其应用领域。
一、红外线传感器的工作原理红外线传感器利用物体对红外辐射的散射和反射特性,通过测量红外线辐射能量的变化来实现物体的检测和测量。
其工作原理可分为以下几个方面:1. 红外线辐射:物体在温度高于绝对零度时会自行辐射红外线。
红外线具有较长的波长,无法被人眼所察觉。
2. 热电效应:红外线传感器中通常采用导热电偶或热电材料来感应红外线辐射。
当红外线辐射照射到导热电偶或热电材料上时,产生微小电压信号。
3. 电信号转换:红外线传感器将热电效应产生的微小电压信号通过专用的电路转换为可读取的电信号。
这种电信号可以是模拟信号,也可以是数字信号。
4. 信号处理与输出:经过电信号转换后,红外线传感器可以利用内部电路进行信号处理,如放大、滤波、校准等。
最终将处理后的信号输出给用户或其他设备使用。
以上是常见红外线传感器的工作原理,具体的工作原理可能因传感器类型和设计而有所差异。
不同类型的红外线传感器包括被动式红外传感器(PIR)、主动式红外传感器(IR)、全景红外传感器、热像仪等。
它们有不同的工作原理和应用场景。
二、红外线传感器的应用1. 安防监控:红外线传感器广泛用于安防监控系统中。
通过检测人体的红外辐射来实现入侵检测和告警功能。
在夜间或低照度环境下,红外线传感器能够精确地检测到人体的热能,大大提高了安防系统的准确性和可靠性。
2. 智能家居:红外线传感器在智能家居中也起到了重要的作用。
通过检测房间内或家电设备表面的红外辐射,实现智能灯光控制、自动空调调节、智能遥控等功能,提高了生活的便利性和舒适度。
3. 机器人技术:红外线传感器被广泛应用于机器人技术中,实现对环境的感知和避障功能。
机器人通过红外线传感器探测前方的障碍物,避免碰撞和损坏。
红外感应原理知识
红外感应是一种用于检测物体位置或行走方向的非接触性自动检测技术。
它利用人眼无法感知的热能或红外线作为探测依据,利用一只或多只红外发射器、接收器以及控制装置作为组成部件,当物体穿过红外发射器发出的光束时,接收器接收到光束被吸收后将发出的电信号传送给控制装置,从而达到检测物体位置或行走方向的目的。
红外感应的原理
红外感应技术基于热释放和光敏器,属于非接触性检测技术,利用发射端和接收端两部分来检测温度的变化,用于探测物体或行走方向。
发射端将一定强度的红外线发射出去,如果发射端探测到物体,红外线会被物体吸收,导致接收端接收到的光减弱,接收端将发出信号给控制装置,由此达到探测物体位置或者行走方向的目的。
红外感应在实际应用中的优势
红外感应系统能够准确、快速、不受环境变化影响,且适用于低压使用,稳定可靠、节能环保。
红外线感应原理红外线感应技术是近年来应用广泛的一种无线控制技术,它通过检测和解读红外线信号来实现对其他设备的控制。
红外线感应原理是基于物体在红外线光谱范围内的发射和接收特性,本文将对其进行详细介绍和分析。
一、红外线简介红外线是一种位于可见光和微波之间的电磁波,其波长范围从0.75微米到1000微米。
与可见光不同,红外线对人眼是不可见的,但对于红外线传感器来说,红外线是十分敏感的。
二、红外线感应原理红外线感应原理主要包括发射和接收两个过程。
1. 发射红外线感应器中的红外发射二极管负责发射红外线信号。
该二极管根据输入的电流,在特定波长的光谱范围内开始发射红外线光束。
2. 接收红外线感应器中的红外接收器负责接收由周围环境中的物体发出的红外线信号。
红外接收器通常由光敏二极管组成,其表面覆盖有一种能够吸收红外线的材料。
当被探测物体接收到红外线感应器发射的红外线光束时,部分光线被吸收,部分光线被反射。
被反射回的红外线光束将重新进入红外接收器,被光敏二极管吸收。
接收到的光信号会引起光敏二极管中的电压变化。
三、信号处理红外线感应器将接收到的红外线信号转换成电信号,并经过信号处理后输出。
信号处理主要包括放大、滤波和解码等步骤。
1. 放大接收到的微弱红外线信号首先需要经过放大电路进行放大,以增强信号的强度,使其能够被后续的处理电路正确解码。
2. 滤波由于周围环境中存在各种光源干扰,而红外线感应器只需对特定频段的红外光信号进行识别。
因此,滤波电路将根据设定的频率范围,对输入的红外信号进行滤波处理,以滤除非目标红外信号。
3. 解码解码电路对经过滤波和放大处理后的信号进行解码,识别出特定的红外码。
不同的红外码代表不同的指令,如开关机、调整音量等。
四、应用领域基于红外线感应原理,红外线感应技术被广泛应用于许多领域,如安防监控、智能家居、机器人控制等。
1. 安防监控红外线感应器可以用于人体检测,通过检测人体发出的红外线信号,实现安防系统的报警功能。
红外传感器工作原理1.源头:红外传感器通常通过自己的红外辐射源来产生红外辐射。
常见的红外辐射源包括红外二极管、红外发射二极管等。
这些源头会产生特定频率和波长的红外辐射。
2.接收器:红外传感器内部还包括一个接收器,用于接收周围环境中的红外辐射。
接收器通常是一种光敏元件,例如光敏电阻(LDR)、光敏二极管(LDR)等。
当红外辐射照射到接收器上时,接收器的电阻或电流会相应改变。
3.信号处理电路:红外传感器的接收器输出的信号通常是微弱且不稳定的,为了使其能够被后续的处理电路处理,通常需要对信号进行放大和滤波等操作。
这部分的电路通常由运算放大器、滤波电路等组成。
接下来,我们来详细了解红外传感器的工作原理。
在工作过程中,红外传感器首先通过其红外辐射源产生红外辐射。
这些红外辐射会向周围环境传播,并与遇到的物体交互作用。
当红外辐射照射到物体表面时,物体会吸收部分红外辐射,同时也会反射部分红外辐射。
物体吸收的红外辐射会被转化为热能,使物体温度升高,而物体反射的红外辐射保持原样。
接收器输出的信号通常是微弱且不稳定的。
为了使其能够被后续的处理电路处理,需要对信号进行放大和滤波等操作。
这部分的电路通常由运算放大器、滤波电路等组成。
处理后的信号可以用于不同的应用和功能。
例如,在自动化控制领域,红外传感器可以用于检测物体的存在或非存在,从而触发相应的控制操作。
在安防监控领域,红外传感器可以用于检测人体的存在并触发警报。
在温度测量领域,红外传感器可以用于测量物体的表面温度。
总结起来,红外传感器通过感测和测量红外辐射来实现不同的功能。
它通过红外辐射源产生红外辐射,通过接收器接收周围环境中的红外辐射,并通过信号处理电路对接收器输出的信号进行放大和滤波等处理。
红外传感器在不同领域具有广泛的应用前景,为许多自动化和智能化系统的实现提供了重要的技术支持。
红外传感器基本原理
红外传感器基本原理是利用物体发射的红外辐射来检测其存在或测量其特性。
其原理主要包括以下几个方面:
1. 物体发射红外辐射:所有物体都会以一定的温度发射红外辐射,其强度和频谱分布与物体的温度和性质有关。
红外传感器利用物体发射的红外辐射来进行检测和测量。
2. 红外辐射的感应:红外传感器中的探测元件(如红外光电二极管、热电偶等)能够感应到物体发射的红外辐射。
当物体发射的红外辐射照射到探测元件上时,会产生相应的电信号。
3. 信号处理:红外传感器将探测元件感应到的红外辐射转化为电信号,并通过信号处理电路对其进行增益、滤波、放大和转换等操作。
这样的信号处理可以提高探测的灵敏度和准确度,并适应不同应用场景的要求。
4. 辐射源的补偿:在某些应用中,为了减少环境因素的影响和提高测量的准确性,红外传感器可能会使用内置或外部的辐射源来补偿环境因素。
这些辐射源可以产生已知强度和频谱分布的红外辐射,用于校准和补偿测量。
基于以上原理,红外传感器可以用于各种应用,包括温度测量、人体检测、无人机导航、安防监控等领域。
不同类型的红外传感器根据其探测元件和信号处理方式的不同,具有不同的特性和适用范围。
红外线感应工作原理红外线感应是一种通过红外线传感器来检测和感知目标物体的技术。
红外线(Infrared radiation)是一种电磁辐射,波长范围在700纳米到1毫米之间,处于可见光的下方。
红外线感应工作原理如下:1. 红外辐射源:红外线传感器需要一个外部红外辐射源发出红外线。
通常使用红外LED或红外激光二极管作为红外辐射源。
红外辐射源的波长通常在850纳米到950纳米之间,这个波长是红外线传感器最敏感的波长。
2. 目标物体反射:红外辐射源发出的红外线照射在目标物体上,目标物体会吸收、折射和反射红外线。
当目标物体的温度不同于周围环境时,会有红外辐射被目标物体发射出来,这被称为热辐射。
3. 接收器:红外线传感器中的接收器用于接收并测量目标物体反射回来的红外线辐射。
接收器通常是一种特殊的光敏元件,如晶体管或光敏二极管,可以通过在电流或电压的变化中测量红外光的强度。
4. 信号处理:红外线传感器在接收到红外线辐射后,将其转化为电信号。
电信号经过放大、滤波、模数转换等处理后,可以得到目标物体反射红外线的强度、频率和波形等数据。
5. 检测距离:根据反射红外线的强度,可以计算出目标物体与传感器的距离。
通常情况下,反射红外线的强度与目标物体之间的距离成反比关系。
因此,通过检测反射红外线的强度,可以确定目标物体与传感器的距离是否在某个预设的范围内。
6. 输出信号:基于对检测距离的判断,红外线传感器可以产生不同的输出信号。
当目标物体与传感器的距离在设定范围内时,传感器输出一个逻辑高电平,表示目标物体存在。
当目标物体超出设定范围时,传感器输出一个逻辑低电平,表示目标物体不存在。
红外线感应广泛应用于不同领域,如安全系统、自动化控制、距离测量和机器人导航等。
在安全系统中,红外线感应可以用于检测人体活动,如门禁系统和监控系统。
在自动化控制中,红外线感应可以用于监测物体的位置、速度和流量等。
在距离测量中,红外线感应可以通过测量反射红外线的强度来计算目标物体与传感器的距离。
红外传感器的工作原理及应用一、红外传感器的工作原理红外传感器是一种能够探测物体周围环境中的红外辐射并将其转化为电信号的装置。
它利用了物体在辐射热能时所产生的红外线,通过特定的原理进行传感和检测。
红外传感器的工作原理主要包括以下几个方面:1.红外辐射原理:每个物体都会根据其自身的温度产生热能,并发射出相应的红外线。
红外传感器通过探测物体发出的红外线来感知物体的存在。
2.红外检测原理:红外传感器通常包含一个红外发射器和一个红外接收器。
红外发射器发射出一定频率的红外光,当有物体靠近时,红外线会被物体吸收或反射。
红外接收器会接收到被物体反射或吸收后的红外线,并将其转化为电信号。
3.信号处理原理:红外传感器接收到的红外信号会经过信号处理电路进行滤波、放大等处理操作,最后输出与被检测物体距离或其他相关信息有关的电信号。
二、红外传感器的应用红外传感器在各个领域中有着广泛的应用,其主要应用包括但不限于以下几个方面:1.安防领域:红外传感器可以用于监控系统中,通过感知人体的红外辐射来实现对区域内的安全监控。
当有人进入监控区域时,红外传感器会发现并触发相应的警报或采取其他安全措施。
2.自动化控制:红外传感器广泛应用于自动化控制领域。
例如,它可以被用作自动门和自动水龙头中的感应装置,当人体靠近时,红外传感器能够检测到并自动开启门或水龙头。
3.无人驾驶技术:红外传感器在无人驾驶技术中起着重要作用。
通过红外传感器可以感知周围的障碍物或其他车辆的存在,从而帮助自动驾驶系统做出相应的决策,保证行驶安全。
4.温度测量:红外传感器可以用于测量物体的温度。
利用物体发出的红外辐射与其温度之间的关系,红外传感器可以将红外辐射转化为相应的温度数据。
5.医疗领域:红外传感器在医疗领域中也有应用。
例如,通过红外传感器可以检测人体的体温,用于发现潜在的疾病症状。
除了以上几个领域,红外传感器还可以应用于火灾报警、夜视设备、气体检测等多个领域。
随着技术的不断发展和进步,红外传感器的应用范围还将进一步扩大。