(完整word版)自动控制鱼缸电路图
- 格式:doc
- 大小:578.50 KB
- 文档页数:18
哈尔滨工业大学华德应用技术学院毕业设计(论文)摘要智能水族箱控制系统, 所有的电路都是在单片机的控制下工作的,目前通常采用的是Motorola公司的MC6805系列的单片机,而本设计中采用了Intel公司的89C51作为控制核心,以单片机89C51为核心结合接口芯片及外围电路以实现水族箱的智能控制。
环境参数检测部分包含采集水体温度、水中含氧量和光照强度,它们由温度传感器Ds18b20和光敏电阻等,对养鱼的水温和光照强度进行测量,然后信号供CPU进行运算判断是否需要加热处理或辅助照明并显示在液晶上。
输出控制执行机由氧气补充模块、温度控制模块、辅助光照模块组成。
智能水族箱系统主要由单片机最小系统单元、液晶显示单元、加热电路、制冷电路、光照单元、氧气单元等部分组成。
关键词单片机;氧气控制;水族箱I哈尔滨工业大学华德应用技术学院毕业设计(论文)AbstractIntelligence aquarium control system, all of the circuit are under the control of the processor, usually use the current work is MC6805 series of Motorola company, and the design of microcontroller is adopted in the Intel company of 89C51 microcontroller as control core, with 89C51 as the core combine interface chip and periphery circuit to realize intelligent control of aquatic animals box. Environmental parameters testing section contains collecting water temperature, water oxygenation and illumination intensity, they by temperature sensor ds18b20 and photoconductive resistance, etc, to fish the water temperature and light intensity measurements and then signal which CPU calculations to decide whether it is necessary to heat treatment or assist illume and displayed on the LCD. Output control execution machine by oxygen supplement module, temperature control module, auxiliary light module.Intelligence aquarium system mainly consists of single chip minimize system unit, liquid crystal display unit, heating, cooling circuit circuit, illumination unit, oxygen unit components.Keywords AT89C51, Oxygen control; LCD displayII哈尔滨工业大学华德应用技术学院毕业设计(论文)目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 系统的开发背景 (1)1.2 系统的开发意义 (2)1.3 课题的研究内容 (2)第2章方案设计与论证 (4)2.1 控制芯片的选择 (4)2.2 温度传感器的选择 (5)2.3 显示模快的选择 (5)2.4 本章小结 (6)第3章硬件设计 (8)3.1 系统硬件结构框图 (8)3.2 主控模块分析 (9)3.2.1 AT89C51概述 (9)3.2.2 主要特性 (9)3.2.3 引脚说明 (9)3.3 温度信号采集单元 (12)3.3.1 DS18B20概述 (12)3.3.2 DS18B20内部结构 (12)3.3.3 DS18B20工作时序 (16)3.3.4 DS18B20与AT89C51的接口设计 (17)3.4 LCD1602液晶显示单元 (18)3.4.1 LCD1602简介 (18)3.4.2 LCD1602的基本参数及引脚功能 (19)3.4.3 LCD1602的指令说明及时序 (22)3.4.4 1602LCD的RAM地址映射及标准字库表 (24)3.4.5 1602LCD的一般初始化(复位)过程 (25)3.5 加热电路 (25)3.6 制冷电路 (26)3.7 DS18b20接口电路 (27)III哈尔滨工业大学华德应用技术学院毕业设计(论文)3.8 1602接口电路 (27)3.9 光敏电阻电路 (28)3.10 本章小结 (29)第4章软件设计及调试 (30)4.1 软件程序设计 (30)4.1.1 系统整体设计流程图 (30)4.1.2 温度采集模块设计 (31)4.1.3 显示模块程序设计 (32)4.1.4 按键模块程序设计 (32)4.2 系统硬件调试 (33)4.3 软件程序调试 (34)4.3.1 软件环境 (34)4.3.2 软件调试 (35)4.3.3 系统联调 (36)4.4 本章小结 (36)结论 (37)致谢........................................................................................ 错误!未定义书签。
DIY鱼缸自动换水装置,微量换水,原理示意图+详细过程摘自《南美水族》,作者:lonewolf本装置可实现什么:全自动微调换水,根据排水速率来控制换水量,完全不用人工参与,同时非常方便改变换水量,懒人的福音。
同时,如果你希望你的鱼缸水质稳定不波动,那么这也是一个非常好的解决方案开篇先扯,是我的习惯。
为什么DIY自动换水装置,是因为1.首先,我是一个懒人,每天让我去换水,我经常忘记,并且用水管加水,经常加水忘记关水龙头,最后水漫金山,若干次之后,受不了了2.由于草缸草长势不好,发帖,别人回帖说可能跟水质波动有关,想想也是,每次换水1/5,直接加自来水,水质不波动才怪,而DIY一个自动换水,有规律的高频率少量换水,可以保持水质稳定3.过年回家的时候,长时间不在屋里,水蒸发后导致水位下降,甚是头疼4.我的鱼缸进水管带除油膜功能,而水位的高低变化让我不得不经常调整除油膜的高度,很烦5.我很懒6.还没想起来基于以上6条灰常重要的原因,勤快的潜意识不停地激励我,于是在我筹备DIY滤桶购买了一堆工具之后,先拿这些工具试手做个DIY 自动换水装置。
某天公交车闲来无事,上车思索,下车想法成型,原理如下:通过水位控制器来控制电磁阀开关,水位低则补水,水位高则停止补水,完活。
(浏览器和显示器分辨率原因,图片右侧不能完全显示的,请点击图片看大图)请看下图:再补充下排水原理:由于平时电磁阀是关上的,所以三通其实就是个两通,由于排水管另外一头低于水位线,所以水会自动通过排水管流出去,通过控制输液管流量调节器,可以控制排水速度。
当排水过多,水位控制开关上的浮漂下沉,导致开关连通,电磁阀打开,开始加水,加水到一定位置,浮漂上升,导致开关关闭,停止加水,同时继续排水由此可见,我这个图是24小时排水+进水,通过调整排水速度,可以做到每天固定流量的的平缓换水,维持水质稳定,同时,你可以不用关心电磁阀如何开关,你只用关心排水量就行了。
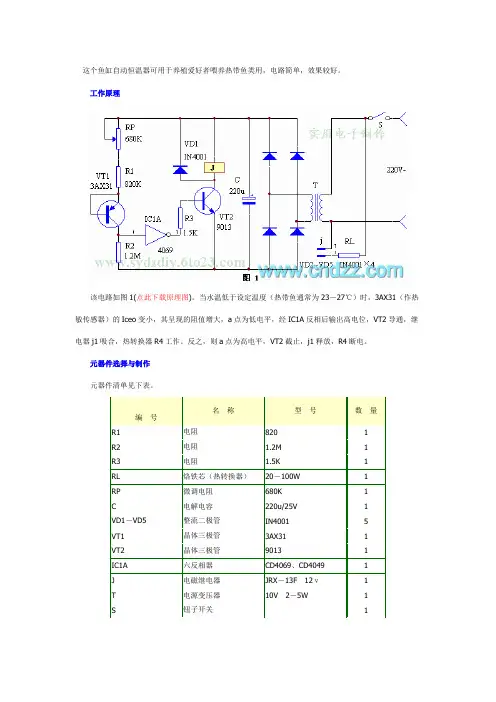
这个鱼缸自动恒温器可用于养殖爱好者喂养热带鱼类用,电路简单,效果较好。
工作原理该电路如图1(点此下载原理图)。
当水温低于设定温度(热带鱼通常为23-27℃)时,3AX31(作热敏传感器)的Iceo变小,其呈现的阻值增大,a点为低电平,经IC1A反相后输出高电位,VT2导通,继电器j1吸合,热转换器R4工作。
反之,则a点为高电平,VT2截止,j1释放,R4断电。
元器件选择与制作元器件清单见下表。
名称型号数量编号R1 电阻820 1R2 电阻 1.2M 1R3 电阻 1.5K 1RL 烙铁芯(热转换器)20-100W 1RP 微调电阻680K 1C 电解电容220u/25V 1VD1-VD5 整流二极管IN4001 5VT1 晶体三极管3AX31 1VT2 晶体三极管9013 1IC1A 六反相器CD4069、CD4049 1J 电磁继电器JRX-13F12v 1T 电源变压器10V2-5W 1S 钮子开关 1热敏元件选用感温变化曲线较好的锗三极管3AX31、3AX34等,反相器用CD4049或CD4069等。
电源变压器用10V、2-5W的小型变压器。
感温头及热转换器的制作见图2。
找一小块合适的有机玻璃打好孔(半沉孔见示意图),让晶体管3AX31正好能放入,将剪短管脚并接好引线的晶体管装入孔内,再用环氧树脂注满小孔,待环氧树脂彻底干后即可使用。
热转换器用20-100W的烙铁芯(功率视鱼缸容积而定),试管选用长20cm、内径2cm的。
先将烙铁芯引线接好,放入试管中,然后放入导热良好的石晶沙,最后用橡皮塞将试管口密封好(最好也用环氧树脂密封)。
先将感温头、热转换器及温度计置于水中,调整RP,观察温度计,使温度控制在23-27℃即可投入使用。
摘要摘要现在越来越多的家庭和公共场所都摆上了各种水族箱。
但作为大部分小型的家庭水族箱设备,都需要人为的手工操作,这给饲主带来了很大的不便。
人们有时会因繁忙的工作,忽视了对观赏鱼的照顾。
本文通过对目前大多数水族箱控制设备应用现状的分析和研究,提出了一种多功能的观赏鱼缸智能控制系统的设计方案。
该控制系统基于89系列单片机的家庭水族箱控制系统。
整套系统以STC89C51单片机为核心芯片,结合传感器技术、继电器原理、C语言编程等技术,集多种控制功能于一体,包括恒温、自动换水、自动喂食、自动水循环等,并可根据需要增加控制参数,通过选择不同元器件控制成本。
本文从功能设计、元器件选择、硬件电路设计和软件设计等几个方面对该控制系统进行阐述。
通过调试期间的运行,表明该控制系统运行稳定可靠、操作简单方便、具有多种节电工作模式。
同时该系统设计灵活、结构简单、成本低廉,易于规模化生产,可广泛用于家庭和宾馆等安装观赏鱼缸的场所。
关键词自动控制;单片机;水族箱;传感器技术AbstractNow, more and more families and public places are put on all kinds of aquarium. As most of the small home aquarium equipment need artificial manual, which brought great inconvenience to the owners. It is sometimes due to busy work, ignoring the care of ornamental fishThis article through to the present most aquarium control device application present situation analysis and research, put forward a kind of multifunctional ornamental fish design scheme of intelligent control system. The control system based on the 89 Series MCU family aquarium control system. The entire system to the STC89C51single-chip microcomputer as the core chip, combined with the sensor technology, relay principle, C language programming technology, sets a variety of control functions, including temperature, automatic water, automatic feeding, automatic water circulation and so on, and may need to increase the control parameters, through the selection of different components of cost control. This article from the function design, components selection, hardware circuit design and software design aspects of the control system are described.Through long time operation test, it shows that the control system is stable and reliable, the operation is simple and convenient, has a variety of energy-saving operation mode. At the same time the system flexible design, simple structure, low cost, easy mass production, can be widely used in families and hotels and other places of installation of ornamental fish.Keywords: automatic control Series MCU aquarium sensor technology目录摘要 (I)Abstract (II)1 绪论 (1)1.1选题背景 (1)1.2国内外研究现状及发展趋势 (1)1.3主要研究内容 (2)1.4课题研究的步骤 (3)2 系统的总体设计 (4)2.1概述 (4)2.2系统的设计要求 (4)2.3 系统总体方案功能 (5)2.3.1 系统的功能组成与控制参数 (5)2.3.2 系统的硬件结构框图 (5)2.4 本章小结 (6)3 系统的硬件设计 (8)3.1硬件总体结构 (8)3.2主要元器件的选取 (9)3.2.1 单片机的选取 (9)3.2.2 3-8译码器和LED数码管动态显示的选取 (11)3.3 各模块硬件设计 (13)3.3.1 时钟电路设计 (13)3.3.2 键盘控制与显示模块设计 (14)3.3.3 温度控制模块 (15)3.3.4 其他模块设计 (16)4 系统的软件设计 (22)4.1 主程序工作流程 (22)4.1.1 主程序工作流程图 (22)4.2 时间和温度读取模块 (23)4.2.1 读取DS1302的时钟 (23)4.2.2 读取DS18B20的温度 (24)4.4 E2PROM模块 (25)4.5 本章小结 (26)5 总体设计的展望 (27)5.1 创新点与应用范围 (27)5.1.1 设计总结 (27)5.1.2 创新点 (27)5.1.2 应用范围 (28)5.2 展望 (28)5.3 本章小结 (28)结论 (29)致谢 (30)参考文献 (31)附录1 (32)1 绪论1.1选题背景随着我国经济的发展和人民生活水平的大幅度提高,人们的消费观念变化很大,消费档次与水平都在提高,人们的生活品味越来越高,环境的个性化、环保化也越来越受到人们的重视,与之相关的休闲、居家装饰等行业相应的日显蓬勃发展趋势。
水族箱温度控制系统(一)系统的概述本系统以AT89C51单片机为控制核心的测控仪,主要是为了对水族箱内的温度控制而设计的。
该测控仪具有检测精度高、使用简单、成本较低和工作稳定可靠等特点,所以具有一定的应用前景。
(二)系统的要求本系统通过单片机AT89C51控制,用18B20数字温度计采集温度。
通过LCD 显示屏显示当前温度,当温度高于20℃,马达将带动风扇的转动,实现自动控制水族箱里的温度.并且随着温度每升高2℃,马达的转动速率提高一倍。
当检测到的温度高于25℃时,发出报警信号。
本设计将实现水族箱温度的自动化控制。
用protues软件绘制电路原理图,再根据电路原理图捍接电路板。
捍接的电路板实现温度的自动化控制。
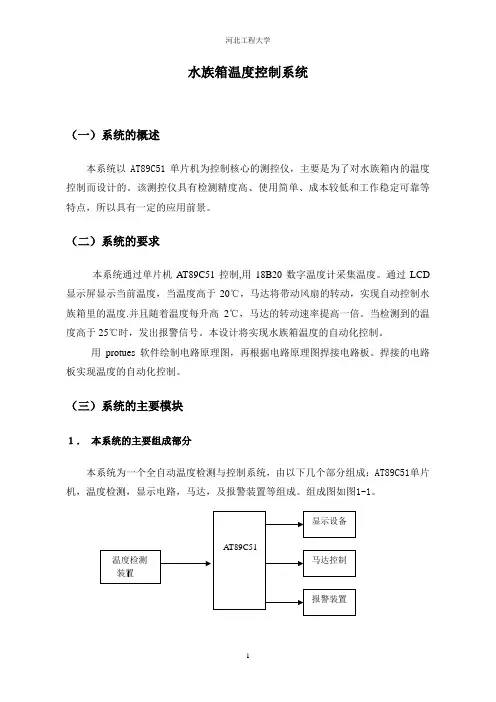
(三)系统的主要模块1.本系统的主要组成部分本系统为一个全自动温度检测与控制系统,由以下几个部分组成:AT89C51单片机,温度检测,显示电路,马达,及报警装置等组成。
组成图如图1-1。
温度检测装置AT89C51显示设备马达控制报警装置图 1-1 温度自动控制主要组成部分由图1-1所示,本系统的核心部分是AT89C51,此芯片是该电路的枢纽。
由它先控制着温度的检测,用检测到的温度实现马达的自动控制,以及显示。
若检测到的温度高于设定的值,则发出报警信号。
2. 各部分的功能(1)AT89C51单片机:它是系统的中央处理器,担负着系统的控制和运算。
(2)温度检测装置:18B20数字温度计对水族箱内温度进行采集,将温度转换成数字。
(3)显示设备:主要是用于显示检测到的水族箱温度。
(4)马达:主要用于带动风扇的转动。
(5)报警装置:产生报警信号。
二、系统的硬件组成电路设计系统的硬件组成部分包括:主控制器AT89C51单片机、温度传感器DS18B20、显示电路LED、马达、报警装置等构成。
AT89C51连接各模块的主控制端口,初步选定将要运用到的电子元器件,再用Protues绘制原理图,再根据原理图捍接电路板。
水族箱温度控制系统(一)系统的概述本系统以AT89C51单片机为控制核心的测控仪,主要是为了对水族箱内的温度控制而设计的。
该测控仪具有检测精度高、使用简单、成本较低和工作稳定可靠等特点,所以具有一定的应用前景。
(二)系统的要求本系统通过单片机AT89C51控制用18B20数字温度计采集温度。
通过LCD 显示屏显示当前温度,当温度高于20C,马达将带动风扇的转动,实现自动控制水族箱里的温度.并且随着温度每升高2C,马达的转动速率提高一倍。
当检测到的温度高于25C时,发出报警信号。
本设计将实现水族箱温度的自动化控制。
用protues软件绘制电路原理图,再根据电路原理图捍接电路板。
捍接的电路板实现温度的自动化控制。
(三)系统的主要模块1.本系统的主要组成部分本系统为一个全自动温度检测与控制系统,由以下几个部分组成:AT89C5单片机,温度检测,显示电路,马达,及报警装置等组成。
组成图如图1-1。
图1-1温度自动控制主要组成部分由图1-1所示,本系统的核心部分是AT89C51此芯片是该电路的枢纽。
由它先控制着温度的检测,用检测到的温度实现马达的自动控制,以及显示。
若检测到的温度高于设定的值,则发出报警信号。
2.各部分的功能(1)AT89C51单片机:它是系统的中央处理器,担负着系统的控制和运算。
(2)温度检测装置:18B20数字温度计对水族箱内温度进行采集,将温度转换成数字。
(3)显示设备:主要是用于显示检测到的水族箱温度。
(4)马达:主要用于带动风扇的转动。
(5)报警装置:产生报警信号。
二、系统的硬件组成电路设计系统的硬件组成部分包括:主控制器AT89C51单片机、温度传感器DS18B20、显示电路LED、马达、报警装置等构成。
AT89C51连接各模块的主控制端口,初步选定将要运用到的电子元器件,再用Protues绘制原理图,再根据原理图捍接电路板。
(一)系统总硬件设计首先对硬件系统18B20定义端口为P2.0,P2.1,P2.2和P0 口控制LCD的显示,定义端口P1.5为马达控制端口,P1.7为发光二极管控制端口。
多功能观赏鱼缸智能控制系统的设计东南大学硕士学位论文多功能观赏鱼缸智能控制系统的设计姓名:葛华申请学位级别:硕士专业:机械工程指导教师:蒋全兴;钱国宝20070501中文摘要多功能观赏鱼缸智能控制系统的设计工程硕士研究生:葛华指导老师:蒋全兴教授东南大学机械工程学院摘要:随着人们物质生活的改善和欣赏能力的提高,观赏鱼缸之类的工艺产品逐渐进入了家庭和宾馆、商场等公共场所。
但是,目前市场上的观赏鱼缸的水温检测、液位控制、水循环、喂食等操作都需要人为的手工进行,这就给人们带来了很大的麻烦和不便。
本文通过对目前大多数水族箱控制设备应用现状的分析和研究,提出了一种多功能的观赏鱼缸智能控制系统的设计方案。
该控制系统以单片机为控制核心,结合传感器技术,集多种控制功能于一体,包括恒温、自动照明、自动换水、自动喂食、自动水循环等,并可根据需要增加控制参数,通过选择不同元器件控制成本,同时在系统中设计一个通信模块,可实现对鱼缸的远程控制和管理。
整个系统分为两个部分:第一部分是以为核心的控制部分,实现对各种控制参数的设置、存储、显示和处理。
第二部分是以为核心的输入输出部分,用于采集由传感器传送过来的各种检测信号,并输出多路信号实现对鱼缸相应功能的实时控制,两部分之间以串口进行通讯。
为实现多台鱼缸控制器的集中管理,提出基于总线的上下位机的通信结构,设计硬件电路原理图,并进行了程序设计。
本文从功能设计、元器件选择、硬件电路设计和软件设计等几个方面对该控制系统进行阐述。
通过较长时间的运行测试,表明该控制系统运行稳定可靠、操作简单方便、具有多种节电工作模式。
同时该系统设计灵活、结构简单、成本低廉,易于规模化生产,可广泛用于家庭和宾馆等安装观赏鱼缸的场所。
关键词:鱼缸;自动控制;单片机;串口通讯;总线英文摘要::. ,:、榭’. ., ,. ’? ..,?, ,. Ⅱ仃 .,. .,,:;. .. ,., , .,,,, .,,. ,..;:; ; ;Ⅱ东南大学学位论文独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
水位自动控制器电路图目前市售水位控制器大都没有水塔(池)进水指示与保护、报警功能,当水源无水或水泵故障时,不能自动停泵,既浪费电能,又容易烧毁电机。
当水位低于下水位且泵无水时,不能及时停泵报警,提醒用户。
因此,其安全性与可靠性尚有不足。
本文介绍的两种水位自动控制器,都是为解决上述问题而设计的。
图1是S Z K-Ⅱ型水位自动控制器电原理图。
同相器I C3、I C4组成大回差施密特触发器。
R12、C4为积分电路,能有效地消除交流电源引入的干扰。
R14、R13使I C4输出呈施密特特性。
通过水塔地电极与下、上水位电极跟水顺序接触,改变I C3输入电压,实现水位自动控制。
I C1、I C2、I C3的输出共同控制三极管V T1。
V T1导通时,C3放电,I C5输出为负。
V T1截止时,V D7反偏,电源经R10向C3充电,延时开始。
到达延时时间后,I C5输出变正,电路进入保护或报警状态。
延时时间应调整为略大于开泵至水塔有进水所需的时间。
V T1截止有两种情况:1、I C1与I C2输出都为正,即水位在上水位电极以上和进水口仍有水流。
这是专为自来水压力不正常须装加压泵或自来水与井、河水并用的环境而设计的报警。
当自来水压力能自流上水塔时,水满报警,提醒用户关闭水阀。
如果水塔加装水位浮球阀,并使浮球阀关水线在上水位电极上方,则不需报警便能自动控制。
这时应拆去V D5、V D6,并将V T1发射极接电源负极,使I C2输出开路以消除本项报警。
2、I C1、I C2、I C3输出都为负,即水位在上水位电极以下、水泵工作和水抽不(未)上水塔时的状态。
这时,在延时时间内,水塔进水口若有水流,则I C1输出变正,V T1导通;若仍无水流,则I C5输出因C4充电电压上升而变正。
V D8、R15能加速I C5翻转和消除电源波动的影响。
I C5的输出分两路,一路为V T2提供基极电流,产生鸟叫声报警;一路通过V D9加至I C4输入端,使其输出变正,水泵停泵,同时通过R11作用于I C3输入端。
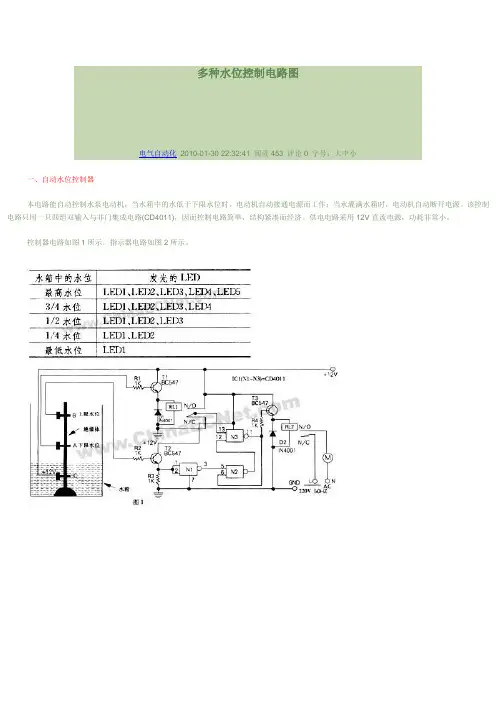
多种水位控制电路图电气自动化2010-01-30 22:32:41 阅读453 评论0 字号:大中小一、自动水位控制器本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
科技经济市场1系统结构框图智能供氧鱼缸具有多种功能与传统的相比具有以下优点:(1)此供电路可以根据不同季节的温度的高低和昼夜不同光线的强弱而自动地给鱼缸供氧;(2)不浪费资源而且真正地给鱼提供一个良好的生存环境;(3)自动化程度高、具有多功能的调节方式、价格低廉并且安装方便等优点。
此系统工作原理是先把220V市电转变成约9V直流电,通过温控传感器对外界环境中的温度高低和光控传感器对外界环境光线的强弱采集进行控制CD4060定时器的时间间歇比,从而控制增氧器电源的通/断,以此达到间歇式充氧动作。
即节约了氧气,又延长了电动机的寿命。
2单元电路的设计2.1直流稳压电源的设计此直流稳压电源是由变压器、单相桥式整流电路、滤波电路和集成三端稳压器等组成。
2.1.1工作原理市电220V交流电压经过变压器变换为整流电路所要求的交流低电压,为了不使电路中产生电压突变的情况,整流电路后再经稳压电器稳压;还要经过滤波电路,把电容和负载电阻并联以便吸收脉动电流,并使输出电压保持平稳,经过整流滤波电路之后的输出电压,这样就得到我们所需的较稳定的9V直流电源。
在输入端用电容C1消除长接线的电感效应,以防止自激振荡,还可以抑制电源的高频脉冲干扰。
输出端用容C1和C2以改善负载的瞬态响应,消除电路的高频噪声,同时也具有消振作用。
同时用D5防止在输入端短路时输出电容C3所存储电荷通过稳压器放电而损坏元件。
图2.1.1稳压电源2.1.2元器件的选择此直流电源电路采用220V的市电的输入,输出的电压为9V左右,故采用4个IN4001的二极管构成桥式整流电路,指示电路由1个LED和1个1kΩ电阻构成;稳压器采用CW7809,滤波电容C3采用1000uF,电容C1和C2分别采用0.33uF和0.1uF,保护二极管D5也采用IN4001。
2.1.3电路调试按图2.1.1布线图进行安装。
安装完毕后应认真检查电路中各元件有无接错、漏接和接触不良之处。
电路1 简单电感量测量装置电路2 三位数字显示电容测试表电路 3 市电电压双向越限报警保护器电路4 红外线探测防盗报警器电路5 禁烟警示器电路6 采用555时基电路的简易温度控制器电路7 采用555时基电路的自动温度控制器电路8 采用CD4011的超温监测自动控制电路电路9 数字温度计电路电路10 热带鱼缸水温自动控制器电路11 采用555时基电路的简易长延时电路电路12 双555时基电路长延时电路电路13 精确长延时电路电路14 数字式长延时电路电路15 循环工作定时控制器电路16 多级循环定时控制器电路17 抗干扰定时器电路18 采用555集成电路的简易光电控制器电路 19 采用功率开关集成电路TWH8751的路灯自动控制器电路20 采用双D触发器CD4013的路灯控制器电路21 使用氖灯的单键触摸开关电路22 双键触摸式照明灯电路23 触摸式延时照明灯电路24 家用简易闪烁壁灯控制器电路25 自动应急灯电路电路26 12V供电的电子节能灯电路27 高响度警音发生器电路28 电子仿声驱鼠器电路29 由HY560构成的语音录放电路电路30 闪烁灯光门铃电路电路3 1 由LM386构成的3W简易OCL功放电路电路32 由TDA2009构成的1W高保真BTL功率放大器电路33 具有音调控制功能的25W混合式Hi—Fi放大器电路34 超级广场效果的耳机放大器电路35 家用电器过压自动断电装置电路36 自动录音控制器电路37 电风扇自动温控调速器电路38 水开报知器电路39 新颖的鱼缸灯电路40 小型电子声光礼花器电路41 电源频率检测器电路42 采用555时基电路的过流检测器电路电路43 自制交流自动稳压器电路44 采用555时基电路的过电压、过电流保护电路电路 45 开关直流稳压电源电路 46 可调直流稳压电源电路47 采用与非门CD4011构成的湿度控制器电路48 三相交流电相序检测器电路49 三相交流电相序指示器电路50 电气设备调温、调速器电路1 简单电感量测量装置在电子制作和设计,经常会用到不同参数的电感线圈,这些线圈的电感量不像电阻那么容易测量,有些数字万用表虽有电感测量挡,但测量围很有限。
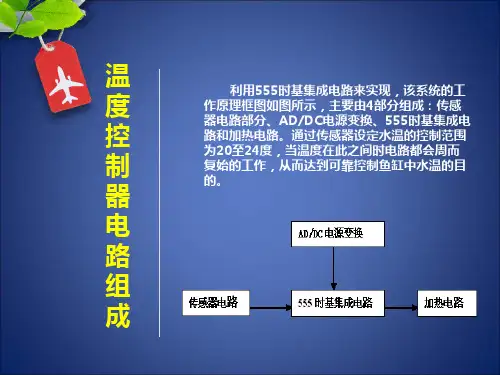
智能鱼缸一、智能温控系统1、制动温控系统由4个部分组成:传感器模块、自动控制模块、加热模块和显示模块。
在自动控制模块中用软件编写控制的方式,设定温度控制域值,如果水温低于20度,则自动启动加热模块以保持水温,而当水温高于24度则停止加热,同时输出温度值到显示模块以实现水温动态显示。
把它和远程终端连接就可以控制温度变化的范围。
二、智能换水系统鱼缸自动换水系统的原理图如图1-1所示:(图1-1) 图1-1鱼缸自动换水系统原理图原理图中的电磁阀(2)和水位器主要控制水位起到双保险,用单片机控制更精确。
有效防止水流出缸外。
电磁阀(1)和抽水马达是把想要换的沉水抽出,换水的多少由单片机设定,流量的大小是用微量调控运行的情况。
工作过程为:用单片机控制电磁阀.电源接通电磁阀就开起,水管就通了。
反之电磁阀电源关闭水管断流。
进水管直接接在自来水管子上。
进水的多少要看想要换多少水(抽掉的水)这也是用单片机控制电磁阀和抽水马达。
排水管接在抽水马达喷水口只要接通电源水就会往外排,如果每天按排水一小时30升水来计算的话,一个星期能换掉210升水(定时器控制排水电磁阀开起电源一小时)。
方法是用定时器设定时间比如下午1-2点排水2-3点进水,这个过程就是自动循环的换水。
定时器设定时间长短和调节电磁阀上的微调是控制换水的多少和水的流量。
水位器是控制水位的高度,进水管接在水位器上起到双重保护,以防水溢出鱼缸。
在此基础上在鱼缸里加入监测水质的仪器。
三、智能供氧系统在鱼缸中加入监测水中氧含量装置,当氧含量少到一定值时超声波鱼缸自动增氧系统利用超声波空化现象对水体进行加氧。
系统模块主要分为三大部分:超声波控制电路、超声波发生电路以及增氧时间自动控制电路。
超声波控制电路主要实现单稳触发过程,对水中溶氧量的缺失程度进行判断;超声波发生电路主要引用超声加湿器的振荡回路原理,高平电流震荡通过换能器把电流转化为超声波,将水打碎成为水雾,使空气溶入水中;增氧时间自动控制电路主要利用单片机进行时间计数处理,当到达一定时间时,启动继电器,由继电器控制超声波振荡驱动回路的开启或关闭。
附录1。
电路图2.程序代码#include <reg52.h〉#include ”delay。
h”#include ”ds18b20.h"#include ”LCD1602。
h"#include "ds1302.h”sfr T2MOD = 0xC9;sbit Heat = P0^4;sbit IN1=P0^3;sbit IN2=P3^5;sbit IN3=P3^6;sbit IN4=P3^7;sbit LED1=P3^2;sbit LED2=P3^3;//水温控制相关参量int tempval = 0;float tmp_new=0;float tmp_old=0;uchar tmp_set1 = 30;uchar tmp_set2 = 35;float tmp_set = 50;float Ctrl_P = 0。
8;float PWM = 0;float cnt=0;//喂食、光照、氧循环相关参量uint FeedInterval=30;//喂食间隔时间uint FeedTime=10;//喂食时间uint OxygenInterval=30;uint OxygenTime=10;uint LightInterval=30;uint LightTime=10;uint FeedInterval_cnt;uint FeedTime_cnt;uint OxygenInterval_cnt;uint OxygenTime_cnt;uint LightInterval_cnt;uint LightTime_cnt;uchar Time_cnt=0;//设定参数相关变量uchar SetTimeFlg=0;uchar SetFeedFlg=0;uchar SetOxygenFlg=0;uchar SetLightFlg=0;uchar FeedFlg=0;uchar OxygenFlg=0;uchar LightFlg=0;uchar data_zancun=0;uchar TestNum=0;void Init_timer(void){RCAP2H=(65536—38400)/256;RCAP2L=(65536—38400)%256;TH2=RCAP2H;TL2=RCAP2L;T2CON=0;T2MOD=0;ET2=1;TR2=1;EA=1;}void Zhengzhuan(void){uchar i;for(i=0;i〈128;i++){IN1=0;IN2=1;IN3=1;IN4=1;delay1ms(1);IN1=0;IN2=0;IN3=1;IN4=1;delay1ms(1);IN1=1;IN2=0;IN3=1;IN4=1;delay1ms(1);IN1=1;IN2=0;IN3=0;IN4=1;delay1ms(1);IN1=1;IN2=1;IN3=0;IN4=1;delay1ms(1);IN1=1;IN2=1;IN3=0;IN4=0;delay1ms(1);IN1=1;IN2=1;IN3=1;IN4=0;delay1ms(1);IN1=0;IN2=1;IN3=1;IN4=0;delay1ms(1);}void Fanzhuan(void){uchar i;for(i=0;i<128;i++){IN1=0;IN2=1;IN3=1;IN4=0;delay1ms(1);IN1=1;IN2=1;IN3=1;IN4=0;delay1ms(1);IN1=1;IN2=1;IN3=0;IN4=0;delay1ms(1);IN1=1;IN2=1;IN3=0;IN4=1;delay1ms(1);IN1=1;IN2=0;IN3=0;IN4=1;delay1ms(1);IN1=1;IN2=0;IN3=1;IN4=1;delay1ms(1);IN1=0;IN2=0;IN3=1;IN4=1;delay1ms(1);IN1=0;IN2=1;IN3=1;IN4=1;delay1ms(1);}}void PageClear(void){uchar i;write_com(0x80);for(i=0;i<16;i++)write_data(’ ');write_com(0xc0);for(i=0;i〈16;i++)write_data(' ’);}void KeyScan(void){uchar temp;P2 = 0xfe;temp = P2;temp = temp&0xf0;if(temp != 0xf0){delay1ms(10);temp = P2;if(temp != 0xf0){switch(temp){case 0xe0:{//TestNum=0;data_zancun=0;PageClear();SetLightFlg=0;SetFeedFlg=0;SetTempFlg=0;SetOxygenFlg=0;SetTimeFlg++;if(SetTimeFlg==7)SetTimeFlg=1;}break;//时间case 0xd0:{TestNum=7;data_zancun++;if(data_zancun==3)data_zancun=1;}break;//数字键7case 0xb0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=4;}break;//数字键4case 0x70:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=1;}break;//数字键1 }while(temp != 0xf0){temp = P2;temp = temp&0xf0;}}}P2 = 0xfd;temp = P2;temp = temp&0xf0;if(temp != 0xf0){delay1ms(10);temp = P2;temp = temp&0xf0;{switch(temp){case 0xe0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=0;}break;//数字键0case 0xd0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=8;}break;//数字键8case 0xb0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=5;}break;//数字键5case 0x70:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=2;}break;//数字键2 }while(temp != 0xf0){temp = P2;temp = temp&0xf0;}}}P2 = 0xfb;temp = P2;temp = temp&0xf0;if(temp != 0xf0){delay1ms(10);temp = P2;temp = temp&0xf0;if(temp != 0xf0){switch(temp){case 0xe0:{//TestNum=8;PageClear();SetTempFlg=0;SetLightFlg=0;SetOxygenFlg=0;SetFeedFlg=0;if(SetTimeFlg!=0){SetTimeFlg=0;}data_zancun=0;}break;//确定键case 0xd0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=9;}break;//数字键9case 0xb0:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=6;}break;//数字键6case 0x70:{data_zancun++;if(data_zancun==3)data_zancun=1;TestNum=3;}break;//数字键3 }while(temp != 0xf0){temp = P2;temp = temp&0xf0;}}}P2 = 0xf7;temp = P2;temp = temp&0xf0;if(temp != 0xf0){delay1ms(10);temp = P2;temp = temp&0xf0;if(temp != 0xf0){switch(temp){case 0xe0:{//TestNum=12;data_zancun=0;PageClear();SetLightFlg=0;SetFeedFlg=0;SetTempFlg=0;SetTimeFlg=0;SetOxygenFlg++;if(SetOxygenFlg==3)SetOxygenFlg=1;}break;//氧气data_zancun=0;PageClear();SetFeedFlg=0;SetTempFlg=0;SetTimeFlg=0;SetOxygenFlg=0;SetLightFlg++;if(SetLightFlg==3)SetLightFlg=1;}break;//照明case 0xb0:{//TestNum=14;data_zancun=0;PageClear();SetLightFlg=0;SetTempFlg=0;SetTimeFlg=0;SetOxygenFlg=0;SetFeedFlg++;if(SetFeedFlg==3)SetFeedFlg=1;}break; //喂食case 0x70:{data_zancun=0;PageClear();SetLightFlg=0;SetFeedFlg=0;SetTimeFlg=0;SetOxygenFlg=0;SetTempFlg++;if(SetTempFlg==3)SetTempFlg=1;}break;//温度}while(temp != 0xf0){temp = P2;temp = temp&0xf0;}}}if(SetTimeFlg){switch(SetTimeFlg){case 1:{if(data_zancun==1){time_date[6]&=0x0f;else if(data_zancun==2){time_date[6]&=0xf0;time_date[6]|=TestNum;} }break;case 2:{if(data_zancun==1){time_date[4]&=0x0f;time_date[4]|=TestNum〈<4;}else if(data_zancun==2){time_date[4]&=0xf0;time_date[4]|=TestNum;} }break;case 3:{if(data_zancun==1){time_date[3]&=0x0f;time_date[3]|=TestNum〈〈4;}else if(data_zancun==2){time_date[3]&=0xf0;time_date[3]|=TestNum;} }break;case 4:{if(data_zancun==1){time_date[2]&=0x0f;time_date[2]|=TestNum〈〈4;}else if(data_zancun==2){time_date[2]&=0xf0;time_date[2]|=TestNum;}}break;case 5:{if(data_zancun==1){time_date[1]&=0x0f;time_date[1]|=TestNum〈<4;}time_date[1]&=0xf0;time_date[1]|=TestNum;}}break;case 6:{if(data_zancun==1){time_date[0]&=0x0f;time_date[0]|=TestNum〈〈4;}else if(data_zancun==2){time_date[0]&=0xf0;time_date[0]|=TestNum;} }break;}}else if(SetTempFlg){switch(SetTempFlg){case 1:{if(data_zancun==1){tmp_set2=TestNum*10+tmp_set2%10;}else if(data_zancun==2){tmp_set2=TestNum+10*(tmp_set2/10);} }break;case 2:{if(data_zancun==1){tmp_set1=TestNum*10+tmp_set1%10;}else if(data_zancun==2){tmp_set1=TestNum+10*(tmp_set1/10);}}break;}}else if(SetFeedFlg){switch(SetFeedFlg){case 1:{{FeedInterval=TestNum*10+FeedInterval%10;}else if(data_zancun==2){FeedInterval=TestNum+10*(FeedInterval/10);} }break;case 2:{if(data_zancun==1){FeedTime=TestNum*10+FeedTime%10;}else if(data_zancun==2){FeedTime=TestNum+10*(FeedTime/10);} }break;}}else if(SetLightFlg){switch(SetLightFlg){case 1:{if(data_zancun==1){LightInterval=TestNum*10+LightInterval%10;}else if(data_zancun==2){LightInterval=TestNum+10*(LightInterval/10);} }break;case 2:{if(data_zancun==1){LightTime=TestNum*10+LightTime%10;}else if(data_zancun==2){LightTime=TestNum+10*(LightTime/10);}}break;}}else if(SetOxygenFlg){switch(SetOxygenFlg)case 1:{if(data_zancun==1){OxygenInterval=TestNum*10+OxygenInterval%10;}else if(data_zancun==2){OxygenInterval=TestNum+10*(OxygenInterval/10);} }break;case 2:{if(data_zancun==1){OxygenTime=TestNum*10+OxygenTime%10;}else if(data_zancun==2){OxygenTime=TestNum+10*(OxygenTime/10);}}break;}}}void MainPage(void)//主界面{uchar i;tmp_set = (float)(tmp_set1+tmp_set2)/2。