B陀螺仪原理2运动方程
- 格式:ppt
- 大小:786.50 KB
- 文档页数:25
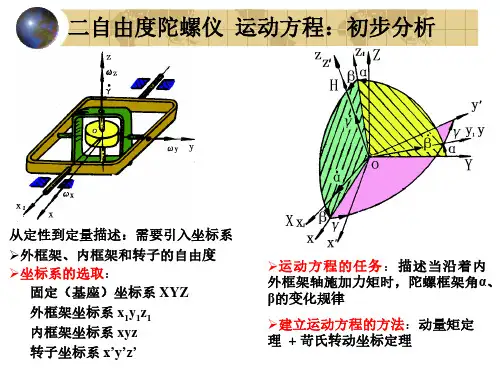
两自由度陀螺仪的运动方程东南大学微惯性系统及器件研究所东南大学微惯性系统及器件研究所1、刚体绕定点O转动;2为惯性坐标系2、为惯性坐标系;3、oxyz 活动坐标系,与ξηζo 刚体固连,且与刚体在点O的三个惯性主轴重合4、刚体以瞬时角速度ω相对惯性坐标系作定点转动,且在空间的瞬ω东南大学微惯性系统及器件研究所东南大学微惯性系统及器件研究所一、用欧拉动力学方程建立陀螺仪的运动方程设陀螺仪坐标系oxyz 以瞬时角速度相对惯性空间作牵连旋转运动,同时转子ωo ξηζ又以角速度绕自转轴作Ω高速转动。
合成的转子绝对瞬时角速度为:() x y z i j kωωωωω′=Ω+=Ω+++东南大学微惯性系统及器件研究所陀螺仪的完整方程:()()x x z y y z x J J J M ωωωΩ++−=&&&() y y x z x z x z y J J J J M ωωωω+Ω+−=−−=&()z z x y y x y x z J J J J M ωωωωΩ+非陀螺效应项与陀螺效应项刚体绕定点转动的欧拉动力学方程式:⎧&()⎪=−+=−+x z y y z x x M J J J M J J J ωωωωωω&&()()⎪⎩⎨=−+z y x x y z z y z x z x y y M J J J ωωω&东南大学微惯性系统及器件研究所东南大学微惯性系统及器件研究所& y z z x y J H J M ωωωω+−=−&z y y x z J H J M ωωωω+=东南大学微惯性系统及器件研究所二、陀螺仪的技术方程和进动方程 z z x y J H J M ωωωω+−=&y z y y x z J H J M ωωωω−+=&x y zωωωΩ>>、、陀螺仪的技术方程(研究陀螺仪的运动特性):y z y J H M ωω+=&z y z J H M ωω−=&东南大学微惯性系统及器件研究所定点转动的刚体在空间的位置sin x ωαθ=−⎧⎪&&cos y z ωθωαθ=⎨⎪=⎩&ωθω&&&&&&&&−==y θθαθαsin cos z y z y J H M ωω+=&z y z J H M ωω−=&cos J H M θαθ+=&&&cos yzJ H M αθθ−=&&&&&& y zJ H M J H M θααθ+=−=&&&东南大学微惯性系统及器件研究所陀螺仪的技术方程:y z y J H M ωω+=&z y z J H M ωω−=&J H M θα+=&&&y z J H M αθ−=&&&东南大学微惯性系统及器件研究所陀螺仪的进动方程:z H M ω=y y zH M ω−=y H M α=&& zH M θ−=沿陀螺仪内环轴作用陀螺仪进动运动的十字交叉原则:沿陀螺仪内环轴作用的力矩将引起主轴绕外环轴产生进动角速度;而沿外环轴作用的力矩将引起主轴绕内环轴产生进动角速度。
陀螺仪工作原理
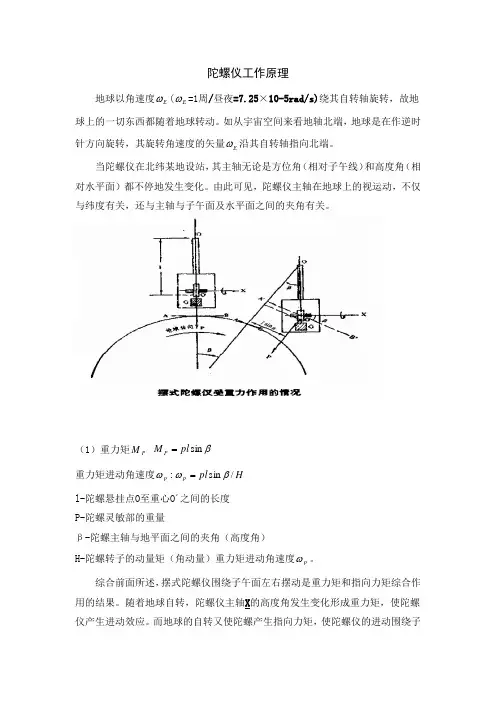
地球以角速度E ω(E ω=1周/昼夜=7.25×10-5rad/s)绕其自转轴旋转,故地球上的一切东西都随着地球转动。
如从宇宙空间来看地轴北端,地球是在作逆时针方向旋转,其旋转角速度的矢量E ω沿其自转轴指向北端。
当陀螺仪在北纬某地设站,其主轴无论是方位角(相对子午线)和高度角(相对水平面)都不停地发生变化。
由此可见,陀螺仪主轴在地球上的视运动,不仅与纬度有关,还与主轴与子午面及水平面之间的夹角有关。
(1)重力矩P M βsin pl M P =
重力矩进动角速度p ω:H pl p /sin βω=
l-陀螺悬挂点O 至重心O ´之间的长度
P-陀螺灵敏部的重量
β-陀螺主轴与地平面之间的夹角(高度角)
H-陀螺转子的动量矩(角动量)重力矩进动角速度p ω。
综合前面所述,摆式陀螺仪围绕子午面左右摆动是重力矩和指向力矩综合作用的结果。
随着地球自转,陀螺仪主轴X 的高度角发生变化形成重力矩,使陀螺仪产生进动效应。
而地球的自转又使陀螺产生指向力矩,使陀螺仪的进动围绕子
午面进行。
当陀螺仪主轴X越接近子午面,指向力矩越小,当X轴指向子午面(即α为零时),则指向力矩为零,但此时陀螺仪因惯性的作用以最快的速度通过子午面。
当陀螺仪主轴X远离子午面时,相反方向的指向力矩使陀螺仪的进动速度慢慢降低,直至达到平衡点而停止。
然后,在指向力矩的作用下,陀螺仪主轴X 又向子午面方向运行,周而复始,使陀螺仪围绕子午面(真北方向)做摆式运动,实现了真北定向的目的。
陀螺仪的工作原理内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.一、工作原理:陀螺仪,是一个圆形的中轴的结合体。
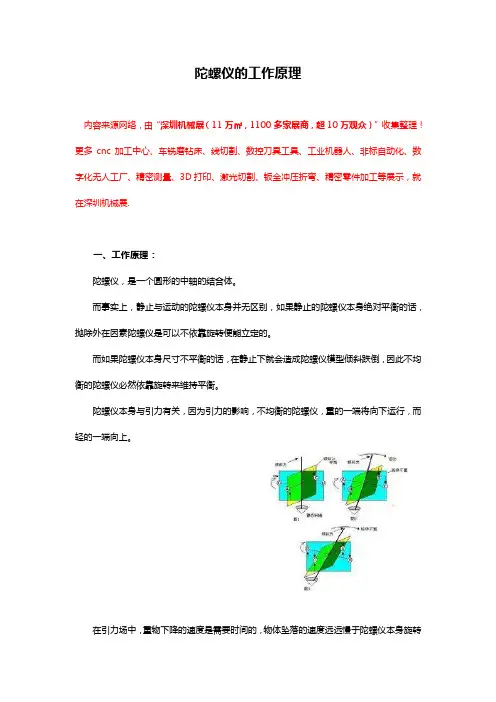
而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。
而如果陀螺仪本身尺寸不平衡的话,在静止下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依靠旋转来维持平衡。
陀螺仪本身与引力有关,因为引力的影响,不均衡的陀螺仪,重的一端将向下运行,而轻的一端向上。
在引力场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本身旋转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪自身的平衡,并形成一个向上旋转的速度方向。
当然,如果陀螺仪偏重点太大,陀螺仪自身的左右互作用力也将失效!。
而在旋转中,陀螺仪如果遇到外力导致,陀螺仪转轮某点受力。
陀螺仪会立刻倾斜,而陀螺仪受力点的势能如果低于陀螺仪旋转时速,这时受力点,会因为陀螺仪倾斜,在旋转的推动下,陀螺仪受力点将从斜下角,滑向斜上角。
而在向斜上角运行时,陀螺仪受力点的势能还在向下运行。
这就导致陀螺仪到达斜上角时,受力点的剩余势能将会将在位于斜上角时,势能向下推动。
而与受力点相反的直径另一端,同样具备了相应的势能,这个势能与受力点运动方向相反,受力点向下,而它向上,且管这个点叫"联动受力点"。
当联动受力点旋转180度,从斜上角到达斜下角,这时联动受力点,将陀螺仪向上拉动。
在受力点与联动受力互作用力下,陀螺仪回归平衡。
〖专业解释〗我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。

陀螺仪原理1. 1.引言2. 2.陀螺效应:进动如果您玩过陀螺玩具,就知道它能表演各种各样有趣的绝技。
陀螺能在细线或手指上保持平衡;能以非常奇妙的方式抵制自转轴运动;但最有趣的陀螺效应还数进动。
这是陀螺仪抵抗重力的表现。
根据这一原理,回转的自行车轮能够像下图所示的那样悬在空中:陀螺仪“抵抗重力”的能力令人莫名惊诧!它是怎么做到的?这种神秘的效应就是“进动”。
一般情况下,进动的发生过程是:如果有一个陀螺仪正在旋转,而您施力转动它的自转轴,则陀螺仪反而会围绕与力轴成直角的轴转动,如下列图形所示:图1中,陀螺仪正围绕自己的轴旋转。
图2中,施力转动陀螺仪的自转轴。
图3中,陀螺仪沿着与输入力方向垂直的轴对输入力做出反应。
那么,为何会发生进动呢?3. 3.进动产生的原因陀螺仪为何会发生这种运动?自行车车轮的轮轴居然能像前面图形所示的那样悬在空中,看上去简直不可思议。
不过,只要想想陀螺仪在旋转时不同部位实际上都发生了什么,就会明白这种运动完全正常!让我们研究一下陀螺仪旋转时的两个小部位——顶端和底端,如图所示:向轮轴施力时,标示的两点会倾向于朝图中指示的方向运动。
如图所示,在向轮轴施力时,陀螺仪的顶端部位将试图向左运动,而底端部位则试图向右运动。
如果陀螺仪没有旋转,则车轮会倒下。
如果陀螺仪正在旋转,那么试想一下这两个部位都发生了什么:牛顿第一运动定律指出,运动中的物体会持续沿直线匀速运动,直到受到不平衡力的作用为止。
因此,陀螺仪顶点受施加到轮轴的力的作用,开始向左运动。
根据牛顿第一运动定律,它会继续向左运动,但在陀螺仪的自转作用下又开始旋转,如下图所示:两个点一边旋转,一边继续原来的运动。
这种效应就是进动的成因。
陀螺仪的不同部位在同一点受力,但随后又转动到新的位置!当陀螺仪顶端的部位向一侧转动90度时,会由于惯性而继续保持向左运动的状态。
底端的部位也是如此——向一侧转动90度时,会由于惯性而继续保持向右运动的状态。
陀螺定向运动方程的动静法推导陀螺的定向运动方程是用来描述陀螺的旋转运动方式,也是机器人控制学中建模与控制陀螺的基本方法。
因此,推导陀螺定向运动方程的动静法是机器人控制学中基础性的理论研究内容。
本文针对陀螺定向运动方程,以动静法推导其运动方程并进行分析。
一、动静法推导原理动静法推导是一种常用的推导转换运动方程的方法,其原理是认为动力学和静力学是一种衔接的概念,即当物体静止时,它的位置是定义的;而当物体的运动是持续的,那么转换过程也是持续的,类似于动力学和静力学之间的衔接过程。
二、陀螺定向运动方程动静法推导(1)给定机器人陀螺在时刻t的角速度Ωt=(ω1t,ω2t,ω3t),给定机器人陀螺在t0(t0<t)时刻的角度令θ0=(θ1,θ2,θ3),则机器人陀螺的角度应满足:θt-θ0=∫t0tdωt(2)将角速度Ωt由旋转坐标系推导到全局坐标系表示:Ωt=R(t)*ω=R(θt)*ω(3)将(2)代入(1)得到:θt-θ0=∫t0tdR(θt)ω(4)在机器人控制学中,一般R(θt)称为运动变换矩阵,根据矩阵乘法求得:θt-θ0=∫t0td[R(θt)*ω](5)最终可得到机器人陀螺的定向运动方程:R(θt)*θt=ω三、陀螺定向运动方程分析陀螺定向运动方程可用于描述机器人陀螺的旋转方式,可以利用陀螺定向运动方程进行诸如机器人三轴陀螺的传动带动等控制。
此外,陀螺定向运动方程的位置模型的推导也十分重要,可以利用陀螺定向运动方程推导出位置模型指令,从而实现机器人的定点控制等功能。
四、结论本文通过动静法推导了机器人陀螺的定向运动方程,并对其分析了应用效果。
以上研究对于机器人控制学的深入理解和应用都有重大意义,可以为机器人控制陀螺的更高精度控制提供参考依据。
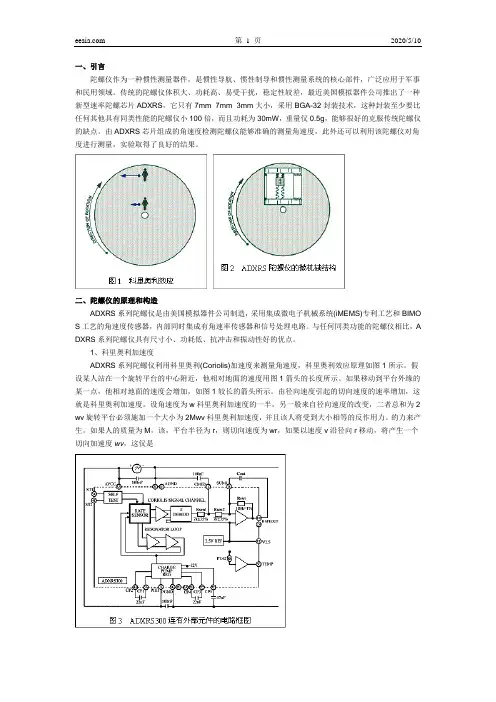
一、引言陀螺仪作为一种惯性测量器件,是惯性导航、惯性制导和惯性测量系统的核心部件,广泛应用于军事和民用领域。
传统的陀螺仪体积大、功耗高、易受干扰,稳定性较差,最近美国模拟器件公司推出了一种新型速率陀螺芯片ADXRS,它只有7mm×7mm×3mm大小,采用BGA-32封装技术,这种封装至少要比任何其他具有同类性能的陀螺仪小100倍,而且功耗为30mW,重量仅0.5g,能够很好的克服传统陀螺仪的缺点。
由ADXRS芯片组成的角速度检测陀螺仪能够准确的测量角速度,此外还可以利用该陀螺仪对角度进行测量,实验取得了良好的结果。
二、陀螺仪的原理和构造ADXRS系列陀螺仪是由美国模拟器件公司制造,采用集成微电子机械系统(iMEMS)专利工艺和BIMO S工艺的角速度传感器,内部同时集成有角速率传感器和信号处理电路。
与任何同类功能的陀螺仪相比,A DXRS系列陀螺仪具有尺寸小、功耗低、抗冲击和振动性好的优点。
1、科里奥利加速度ADXRS系列陀螺仪利用科里奥利(Coriolis)加速度来测量角速度,科里奥利效应原理如图1所示。
假设某人站在一个旋转平台的中心附近,他相对地面的速度用图1箭头的长度所示。
如果移动到平台外缘的某一点,他相对地面的速度会增加,如图1较长的箭头所示。
由径向速度引起的切向速度的速率增加,这就是科里奥利加速度。
设角速度为w科里奥利加速度的一半,另一般来自径向速度的改变,二者总和为2 wv旋转平台必须施加一个大小为2Mwv科里奥利加速度,并且该人将受到大小相等的反作用力。
的力来产生。
如果人的质量为M,该,平台半径为r,则切向速度为wr,如果以速度v沿径向r移动,将产生一个切向加速度wv,这仅是陀螺仪通过使用一种类似于人在一个旋转平台移出或移入的谐振质量元件,利用科里奥利效应来测量角速度。
图2示出了ADXRS系列陀螺仪完整的微机械结构,陀螺仪通过附着在谐振体上的电容检测元件测量谐振质量元件及其框架由于科里奥利效应产生的位移。
陀螺进动方程
1. 陀螺运动的基本方程
陀螺运动的基本方程是一个非线性微分方程,描述了陀螺的角动量、陀螺的旋转轴和进动轴之间的关系。
该方程通常表示为:L = w × H,其中L是陀螺的角动量,w是陀螺的旋转轴,H是陀螺的进动轴。
2. 进动方程推导
进动方程推导是建立在陀螺运动的基本方程基础上的。
通过推导,我们可以得到进动方程的一般形式。
进动方程描述了陀螺的旋转轴和进动轴之间的关系,以及它们随时间的变化规律。
3. 陀螺的旋转轴和进动轴
陀螺的旋转轴是指陀螺在旋转时的轴线,而进动轴是指陀螺在进动时的轴线。
通常情况下,旋转轴和进动轴并不重合,它们之间的关系由进动方程描述。
4. 陀螺的定轴性和进动性
陀螺的定轴性是指陀螺在旋转时,其旋转轴保持不变的性质。
而进动性则是指陀螺在受到外力矩作用时,其旋转轴将绕着进动轴转动的性质。
陀螺的定轴性和进动性是互相关联的,它们的存在使得陀螺能够稳定地旋转和进动。
5. 陀螺运动的特性
陀螺运动的特性包括周期性、稳定性和对称性等。
由于陀螺的定轴性和进动性,其运动具有周期性和稳定性,同时其旋转轴和进动轴之间存在着对称性。
这些特性使得陀螺在许多领域都有着广泛的应用。
6. 陀螺运动的应用
陀螺运动在许多领域都有着广泛的应用。
例如在导航、姿态控制和振动抑制等方面,陀螺都可以起到关键的作用。
此外,陀螺还可以用于制造各种机械系统和装置,如陀螺仪、惯性导航系统等。
陀螺主要参数计算公式和⽅程
1系统空间回转⾓动量
圆盘相对于定点O旋转,我们可以把圆盘当做质点来考虑,其⾓动量为
这是陀螺转⼦相对O点的⾓动量,是反映在整个系统上的空间回转⾓动量,可以⽤它直接计算陀螺⼒。
2陀螺⼒
⽤F T表⽰陀螺⼒,其作⽤点在外⼒作⽤点,其⽅向是陀螺⾃转轴轴端所在的瞬轴旋转平⾯的切线⽅向。
3章动⾓
⾸先说明⼀点:外⼒对系统的作⽤所产⽣的加速度F/m,只是陀螺转⼦整体下降加速度,将其转换为⾓加速度,则⽔平翻转轴的翻转⾓加速度以之相同。
该加速度的作⽤,受⾃转影响不可直接⽤于质⼼速度的计算。
质⼼的实际运动速度受到空间瞬时⾓动量的驱使,并不按照F作⽤下的匀加速模式运动。
因此,必须按照瞬轴⾓速度,来计算因空间旋转所导致的质⼼的⾓位移。
章动⾓积分式和简化公式
4⽔平⾓位移
⽔平⾓位移积分式和简化公式
5陀螺转⼦质⼼球⾯轨迹⽅程
以上是陀螺主要参数的计算公式和⽅程,有兴趣的朋友可以,⾃拟原始数据,利⽤上述公式计算.保证经得起各种考验。
陀螺仪的工作原理陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。
我们骑自行车其实也是利用了这个原理。
轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。
然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义.传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约.自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
1976年等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。
由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件.和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。
塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多.也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。
利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,这样就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。
第三章 旋转质量陀螺仪及其运动微分方程§3.1 旋转质量陀螺仪的基本特性旋转质量陀螺仪(简称陀螺)是把转子以某种方式支承起来,使转子具有转动自由度的定点转动刚体。
在分析单自由度陀螺仪的运动特性之前,我们首先给出陀螺仪的自由度的概念。
陀螺仪的自由度是指陀螺仪转子自转轴相对于壳体的转动自由度。
由此可以看出,旋转质量陀螺仪从自由度方面看有单自由度陀螺仪和双自由度陀螺仪两大类。
一 旋转质量陀螺仪的简化模型为定性说明陀螺仪的基本特性,首先研究如图3.1所示的简化模型:对称刚体以角速度Ω绕固定点o 高速旋转。
坐标系oxyz 与刚体固连,其中ox ,oy ,oz 取通过o 点的三根惯性主轴方向,且oz 轴沿刚体的旋转对称轴。
设刚体相对三个主轴的转动惯量分别为x J ,y J ,z J ,则,刚体的角动量H 可表示为x x y y z z J J J =Ω+Ω+ΩH i j k (3-1)在刚体绕其对称轴高速旋转的情况下,可以认为z x Ω>>Ω,z y Ω>>Ω,于是可以得到角动量H 的近似表达式z z J H ≈Ω=H k k (3-2)因为z Ω是刚体绕其旋转对称轴高速旋转的角速度,通常称其为刚体的自转角速度;而x Ω、y Ω可视为刚体旋转对称轴z 轴绕x ,y 轴的低速转动,称它们为刚体的进动角速度。
这样,式(3-2)就可说明一个近似结论:“陀螺对点o 的角动量H 近似等于自转角动量,其方向始终与旋转对称轴保持一致,即H 相对于oxyz 坐标系不变。
”有了角动量表达式,就可以用角动量定理M H =dtd i (3-3) 来研究陀螺的运动规律,即陀螺的基本特性。
将式(3-3)写成相对于oxyz 坐标系的欧拉方程形式x图3.1 绕定点高速旋转的刚体M H ωH =⨯+dtd (3-4) 式(3-4)中的M 是作用于陀螺上的外力矩。
由于H 相对于oxyz 坐标系不变,所以有0=dtd H ,于是式(3-4)可简化为 M H ω=⨯ (3-5)式(3-5)中ω、H 、M 三个向量之间的关系符合右手螺旋法则。
陀螺仪原理实验指导书王军惯性导航实验室惯性技术基础实验(一)——陀螺特性一、陀螺仪陀螺仪的基本结构如图1,中间是一个转子,转子的轴叫主轴,又称Z轴。
转子和主轴还可以绕水平轴(又称Y轴)转动;又可以绕垂直轴(又称Z轴)转动。
这样,陀螺仪的主轴可以指向空间任何方向。
这种陀螺仪称为自由陀螺仪。
图1 陀螺仪基本结构为讨论方便,我们规定用“右手法则”来确定主轴旋转的正方向,右手握拳,拇指与四指垂直,四指顺着转子的转动方向,拇指所指的方向就是主轴的正方向。
我们实验室所用的陀螺仪为电动陀螺仪,是航海型电罗经回转球里的一个陀螺马达,所用电源为三相110V 330周。
正常转速为19800转/分。
由于转速比较高,陀螺特性就比较明显。
二、陀螺仪第一特性——定轴性当陀螺仪的转子尚未旋转之前,我们就不能从它的装置中察觉出它与通常的非陀螺体有任何不同的现象。
关于非陀螺体,这里所指的是实验以前不具有动量矩的物体。
当陀螺仪的转子以高速绕其极轴Z旋转时,不管怎样移动或转动它的座底。
如图2主轴在空间所指的方向不变。
主轴指向的稳定与否,决定于转子的转速与重量。
转速高、重量重、指向性就强。
指向性强的陀螺仪,即使受到短时间的强烈冲击加于平衡环上时,对主轴原来的位置却不会产生明显的效果。
tH=d d 若支撑摩擦力矩很小可忽略不计时,又当外力矩为零,即0=M ,则:0d d =tH该式表示动量矩H 在瞬刻时间内没有变化,即表示陀螺转子动量矩H 大小不变,方向也不变。
因此陀螺仪主轴的指向就不变。
三、陀螺仪的第二特性——进动性在外加力矩作用下,陀螺仪运动的特性发生变化,加在陀螺仪外平衡环上的力矩会引起陀螺仪绕内平衡环轴而旋转。
反之,加在内平衡环上的力矩,会引起陀螺仪绕外平衡环轴而旋转。
当外加力矩的方向改变时,则平衡环的转动方向也随之改变。
假设有一外力F 作用在陀螺仪的主轴上,如图3,如果转子是不动的,那么主轴就要沿着F 力的作用方向向下运动。
它使整个转子绕着Y 轴转动。