TDI_CCD全景航空相机前向像移补偿的数字实现方法
- 格式:pdf
- 大小:284.47 KB
- 文档页数:8

航空相机的像旋转特性分析及其补偿方法随着数字技术的发展,航空相机已经成为航空摄影的主要设备。
航空相机的像旋转特性对航空视觉技术的有效运行和性能影响极大,因此越来越多的研究关注于对这一特性的分析和补偿研究。
本文首先描述了航空相机的主要性能参数,并针对航空相机的像旋转特性进行分析,对像旋转性能进行了较为详细的研究,并提出了几种像旋转补偿方法。
一、航空相机的主要性能参数航空相机是一种用于航空摄影的设备,它以自动聚焦和连续取景为特点,具有多种性能参数,如焦距、光圈、快门、可安装附件等。
1、焦距焦距是指当相机对焦时,相机与拍摄物体之间的距离,它决定了相机的拍摄窗口大小,是控制摄影物体大小、拍摄视角的重要参数。
2、光圈光圈是指相机的光圈后口的开口,光圈越大,进入相机的光线数量越多,图像的曝光量也会相应增加。
3、快门快门是指当相机拍摄时,光道口的遮蔽篮,它决定了相机拍摄时光线数量和时间,也是影响相机拍摄曝光量的重要参数。
4、附件附件有多种,如定焦镜头、变焦镜头、滤镜组等,可以有效改变相机的焦距、变焦范围、滤镜的透射效果等,相应改变相机的拍摄物体大小、曝光量等。
二、航空相机的像旋转特性分析像旋转是指图像对象旋转时,相机拍摄窗口中内容物的旋转状态,像旋转特性描述了图像旋转时图像成像质量的变化情况,在实际应用中也是性能评价指标之一。
具体来看,当航空相机图像旋转时,会有一些变形,比如边缘变得不规则,图像噪点增加等,这些现象造成的影响对航空视觉技术的有效运行和性能变得至关重要。
三、航空相机像旋转补偿方法为了解决航空相机图像旋转时变形问题,采取一定的补偿措施和技术措施是非常必要的,这样可以使图像旋转时的图像模糊、失真等影响最小,提高图像的显示质量、抗旋转性能。
1、定焦镜头补偿定焦镜头的抗旋转性能较好,使用定焦镜头可以有效提高小像素航空相机的抗旋转性能,减少图像旋转时的变形等。
2、旋转补偿算法采用浮点卷积运算和插值算法,可以获得较好的旋转补偿效果,使图像抗旋转性能和显示效果得到改善。

航空相机扫描像移片上补偿技术匡海鹏;王德江;孙崇尚【摘要】查打一体化是当前航空相机的一个主要发展方向,其中一项关键技术为扫描像移的动态、高精度补偿.基于面阵探测器的时间延迟积分(TDI)扫描像移补偿方式相比于光机式的像移补偿方式具有天然的优势,然而当前的面阵探测器TDI像移补偿精度是像素级的,进一步提高查打一体化相机分辨率遇到了瓶颈.针对于此本文首先介绍了查打一体化航空相机工作原理,然后针对帧转移CCD的特性建立了电荷行间转移的数学模型与电荷转移像移的调制传递函数模型,在此基础上提出了一种查打一体化航空相机扫描像移的片上补偿方法,采用该方法可将西相位面阵TDI CCD的像移补偿精度提高至1/2φ像元.最后搭建了实验平台并给出了二、三、四相位面阵TDI CCD电荷转移像移对遥感图像质量的影响,同时也证明了提出的方法能够显著提高图像质量.【期刊名称】《激光与红外》【年(卷),期】2015(045)004【总页数】7页(P415-421)【关键词】查打一体化航空相机;扫描像移;调制传递函数;帧转移CCD;电荷转移像移【作者】匡海鹏;王德江;孙崇尚【作者单位】中国科学院长春光学精密机械与物理研究所,中科院航空光学成像与测量重点实验室,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,中科院航空光学成像与测量重点实验室,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,中科院航空光学成像与测量重点实验室,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院大学,北京100049【正文语种】中文【中图分类】V443.51 引言随着CCD传感器技术的进步,新一代航空高分辨率航空侦察相机如DB110、F9120均采用大靶面探测器替代传统的胶片光敏介质[1-3],这显著提高了相机整体的智能化水平与情报信息的处理效率。

航空相机的像旋转特性分析及其补偿方法航空相机是航空影像采集技术中重要的组成部分。
航空相机的图像质量主要取决于航空相机的像旋转特性。
像旋转的概念源于航空相机用于低空投影拍摄的特殊要求,即拍摄到的图像必须由垂直于地面的水平投影改变为近似正射投影,以满足全球地形矢量数据产品制作的要求。
由于航空相机在拍摄过程中受到角速度和角加速度的影响,它必须受到精密的校正以保证其拍摄的图像的正确性及其质量。
航空相机像旋转的校正主要通过四种方法实现:静止安装法、表面滑轮法、电子滤镜法和精确执行仪法。
静止安装法是最基础的,通过安装在平面上的支架来限制航空相机的像旋转。
表面滑轮法是通过放置在航空相机和支架之间的盘子来修正像旋转,从而实现航空相机的像旋转精度控制。
电子滤镜法是基于光学滤镜原理,使用红色、绿色和蓝色滤镜来改变航空相机拍摄到的图像,并实现航空相机像旋转校正。
精确执行仪法是基于传感器和电机组件,在安装过程中,通过航空相机本体上的传感器来检测航空相机的运动变化,并通过安装的电动机组件根据变化的参数来调节航空相机的像旋转,从而达到校准的目的。
国内外在航空相机的像旋转校准方面的研究表明,电子滤镜法能够提高航空相机拍摄到的图像的像旋转精度和图像分辨率,但效果不够明显,特别是在低空拍摄方面。
精确执行仪法可以更精确地控制航空相机的像旋转,但由于复杂性和成本的原因,它很少被应用。
此外,航空相机图像的像旋转常常无法精确校准,存在一定的像旋转误差,因此对于存在像旋转误差的图像,还需采用其他补偿方法,以消除像旋转误差,提高图像质量。
目前比较常见的像旋转补偿方法主要有两种:数字像旋转补偿法和滤镜像旋转补偿法。
其中,数字像旋转补偿法可以通过数字平面投影理论来消除像旋转误差,对图像进行重新缩放,使其满足全球地形矢量数据产品制作的要求。
滤镜像旋转补偿法是通过改变原图像的颜色比例,使其满足全球地形矢量数据产品制作的要求,从而消除图像像旋转误差。
航空相机的像旋转特性分析及其补偿方法近年来,由于航空相机的应用范围越来越广泛,如航空遥感、卫星隧道的测绘和地质勘探等。
由于航空相机的结构和使用环境的复杂性,其内部的像旋转特性已经成为一个严峻的问题。
它会影响相机的像表面的正确性,给相关的定位和测量活动带来严重的影响。
一、航空相机的像旋转特性航空相机的像旋转特性是指当航空相机从垂直于像平面法线方向转动时,多个像点偏移的程度。
航空相机在使用过程中,会受到机身抖动、气流动力作用等各种因素的影响,会造成像旋转,影响其定位和测量精度。
由于航空相机采用双组平行光学系统,当其各台架之间转动时,像旋转也随之产生,并影响投影质量。
二、航空相机的像旋转补偿方法1.像旋补偿对航空相机来说,像旋补偿是一种改善像旋转的方法。
通过在航空相机内部安装像旋补偿装置,当像旋转时,可自动补偿像旋转,从而保证像表面的正确性。
2.安装位置预设在安装航空相机时,为了保证影像的正确性,可以采取预定的安装方法,使相机的安装位置在航空器的整个抖动过程中尽量保持固定。
3.相机位置把握为了减少像旋转的影响,可以采用控制计算机定时把握航空相机的位置,及时作出调整,使其保持垂直于像平面法线的位置。
4.特殊坐标校正当像旋转超出规定范围时,可以采取特殊坐标校正方法,通过确定特定标绘点,以便在内部计算机中进行特殊坐标校正。
三、结论航空相机的像旋转特性是一种严重的问题,其影响相机的像表面正确性,并给相关定位和测量活动带来影响。
近年来,学者们针对航空相机的像旋转特性开展了大量的研究,并研究出了多种补偿方法,可有效降低航空相机的像旋转影响,使其定位和测量活动能够更加准确。
全景式航空遥感器TDICCD精密装调必要性分析及实现方法全景式航空遥感是一种通过航空器搭载高分辨率遥感传感器对地面进行全景式观测和数据采集的技术。
其中,TDI(Time Delayed Integration)CCD(Charge-Coupled Device)是一种精密的遥感传感器,它具有较高的光谱响应、灵敏度和动态范围,被广泛用于航空遥感领域。
首先,全景式航空遥感器TDICCD的精密装调是保证数据质量的关键。
精密装调可以消除传感器在飞行中的轨迹偏差、姿态误差等不确定因素对数据采集的影响,提高数据的准确性和精度。
其次,精密装调可以提高全景式航空遥感器的稳定性和可靠性。
精密装调可以优化并校正传感器的各种参数,提高传感器的性能和工作稳定性,保证数据采集的连续性和可靠性,为后续的数据分析和应用提供有力的支持。
再次,精密装调可以实现遥感传感器的高动态范围。
全景式航空遥感器需要在不同光照条件下进行观测和数据采集,而光照条件的变化幅度较大。
精密装调可以调整传感器的灵敏度和动态范围,使其适应不同光照条件下的观测需求,提高数据采集的灵活性和适用性。
最后,精密装调还可以提高全景式航空遥感器的观测效率。
精密装调可以优化传感器的采样参数和观测策略,提高数据的采样频率和观测覆盖范围,减少传感器的盲区和重复观测,提高数据采集的效率和利用率。
实现全景式航空遥感器TDICCD的精密装调可以采用以下方法:首先,调整传感器的曝光时间和增益。
传感器的曝光时间和增益对数据采集的质量和精度有着重要的影响。
通过准确定义传感器的曝光时间和增益参数,可以提高数据的动态范围和准确性。
其次,校正传感器的位置和姿态误差。
全景式航空遥感器在飞行过程中可能受到轨迹偏差、姿态误差等因素的影响。
通过精确测量和校正传感器的位置和姿态误差,可以消除这些误差对数据采集的影响,提高数据的准确性和一致性。
再次,优化传感器的数字信号处理算法。
传感器的数字信号处理算法对数据的质量和准确性有着重要的影响。
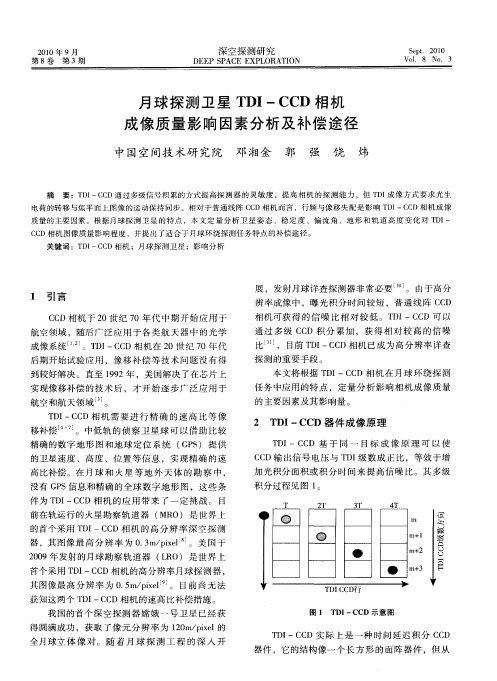
卫星振动对TDICCD成像质量的影响及补偿方法石俊霞;薛旭成;郭永飞【摘要】为了对卫星振动图像进行稳像处理,分析了卫星振动对时间延时积分(TDI)电荷耦合器件(CCD)成像质量的影响,提出了一种对卫星振动进行补偿的方法.首先介绍了TDICCD的工作原理及其对振动的敏感性,然后以调制传递函数(MTF)为评价标准研究了振动对TDICCD成像质量的影响,重点分析了TDICCD积分级数与振动的关系.通过对卫星振动数据的具体计算表明,TDICCD的积分级数越大,卫星振动对成像质量的影响越严重.当TDICCD积分级数大于或等于54时,MTF值已下降到95%以下.根据分析结果,提出了基于快速CCD的卫星振动检测方法和基于振镜的卫星振动补偿方法来补偿卫星振动对TDICCD成像质量的影响.在卫星振动检测技术中,提出了一种改进的灰度投影算法来检测卫星振动参量,检测误差不超过0.5个像素.【期刊名称】《光电工程》【年(卷),期】2010(037)012【总页数】6页(P11-16)【关键词】稳像;卫星振动;TDICCD;调制传递函数;灰度投影算法【作者】石俊霞;薛旭成;郭永飞【作者单位】中国科学院长春光学精密机械与物理研究所,长春,130033;中国科学院研究生院,北京,100039;中国科学院长春光学精密机械与物理研究所,长春,130033;中国科学院长春光学精密机械与物理研究所,长春,130033【正文语种】中文【中图分类】V445.80 引言TDICCD是一种以特殊方式工作的线阵CCD,它通过多级时间积分来延长积分曝光时间,不仅大大提高了光通量,而且提高了相机的灵敏度和信噪比,降低了光能量对相机相对孔径的要求,有利于降低重量和成本。
与同样的线阵CCD相机相比,由于N级积分的TDICCD相机的光能量利用率可提高N倍,信噪比可提高倍,因此TDICCD在暗视场下成像有很大优势,在高分辨航天相机中具有广泛的应用。
TDICCD正常工作的基本前提是光生电荷包的转移与焦平面上的图像转移速度完全同步,任何的匹配误差都将导致图像的模糊。
第16卷 第12期2008年12月 光学精密工程 Optics and Precision Engineering Vol.16 No.12 Dec.2008 收稿日期:2008208215;修订日期:2008210214. 基金项目:中国科学院知识创新工程领域前沿资助项目(No.O70Y32R070)文章编号 10042924X (2008)1222465208T D I 2CCD 全景航空相机前向像移补偿的数字实现方法王德江,匡海鹏,蔡希昌,刘志明,张雪菲(中国科学院长春光学精密机械与物理研究所,吉林长春130033)摘要:为了提高航空相机的照相分辨率,必须对航空相机拍照时飞行方向上景物与感光介质之间存在相对运动产生的前向像移进行补偿,以使景物与感光介质在拍照过程中相对静止。
分析了TDI 2CCD 全景航空相机产生前向像移的原因、像移补偿精度与伺服系统指标之间的关系,以及补偿机构-反射镜的工作方式;然后,提出了一种基于定点数字信号处理器的控制系统来实时实现前向像移补偿的算法。
深入讨论了数字伺服控制系统中的补偿精度、算法选择、相位计算、时间约束等关键问题,并给出了一种适合于工程实际的硬件结构与软件流程。
实验结果表明,速度环的稳速误差为0.85%,带来的像移为0.425μm ,位置环的归位时间为0.8s ,满足系统总体要求。
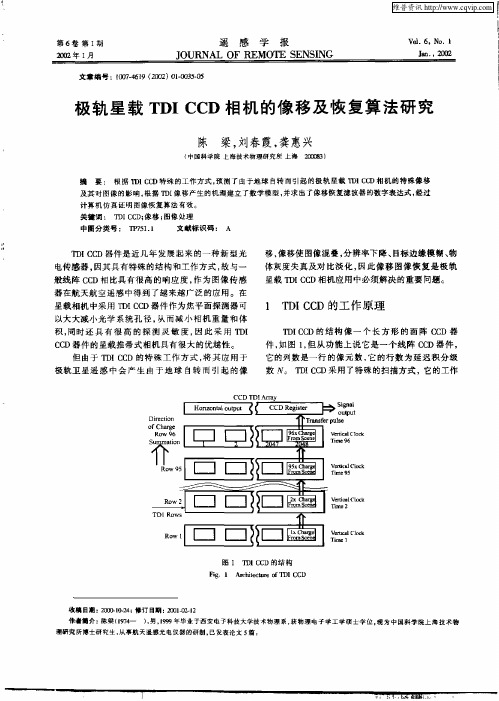
关 键 词:航空相机;前向像移补偿;数字信号处理中图分类号:V475.3;V241.53 文献标识码:ADigital implementation of forw ard motion compensation inT DI 2CCD panoramic aerial cameraWAN G De 2jiang ,KUAN G Hai 2peng ,CA I Xi 2chang ,L IU Zhi 2ming ,ZHAN G Xue 2fei(Changchun I nstit ute of O ptics ,Fi ne Mechanics an d Physics ,Chi nese A cadem y of S ciences ,Changchun 130033,Chi na )Abstract :For compensating t he forward motio n caused f rom t he relative movement between scene and sensitive medium when p hotograp hing by a aerial camera ,a digital compensatio n met hod is presented to keep a relative still for t he scene and t he sensitive medium to imp rove image resolution.The causes of image forward motions and relationship between compensation precision and requirement s for servo cont rol system are analyzed and t he working of compensation st ruct ure 2scanning mirror is discussed.Then ,a real time forward motion compensation system based on digital signal processing chip is pro 2posed to implement t he cont rol algorit hm digitally.Some critical issues in servo cont rol system ,such as compensation p recision ,algorit hm selection ,p hase calculation and time const rains are intensively st udied.Finally ,a hardware architect ure and a software flow chart suitable for engineering are pres 2ented.Experiment result s indicate t hat t he error of velocity loop stabilization is 0.85%,t he image motion is 0.425μm ,and t he time used to go back to t he original position is 0.8s ,which can meet t herequirement s of t he system.K ey w ords:aerial camera;forward motion compensation;digital signal processing1 引 言 TDI2CCD(Time Delay and Integration Charge2Coupled Devices)是一种特殊的线阵CCD 器件,它利用时间延迟积分技术,可在低照度的条件下,获得高灵敏度、高空间分辨率的图像,利用机械或光学拼接技术还可获得大视场的图像,因此该器件被广泛应用于航空、航天相机中[1]。
与地面拍照不同,在航空相机摄影时,由于振动、飞机的前向飞行以及相机的摆动等,被照景物与感光介质间存在相对运动,这会带来图像的拖尾效应,导致图像模糊,给后续的图像判读工作带来极大的困难[2]。
全景式航空相机像移主要分为以下几类[3]:飞机前向飞行带来的前向像移;飞机的飞行姿态(俯仰、偏航和滚动)带来的像移。
像移的补偿方式主要分为以下几种:光机式补偿,电子式补偿和图像式补偿。
光机式补偿根据光学原理利用机械结构使景物与感光介质在摄像期间保持相对位置不变,其中控制系统的精度对补偿效果起决定性影响[4];电子式补偿主要针对飞机的前向飞行引起的像移,它利用感光介质(主要是CCD器件)的电荷转移驱动技术使景物与相机同步,其中输入给CCD的行转移频率准确性对补偿的效果起决定性影响;图像式补偿是利用图像处理技术,从拍摄到的照片中恢复原信号,该方法主要有两种实现手段:(1)预先知道像移量的大小,然后恢复,这种方法恢复的效果尚可;(2)盲信号恢复,恢复的效果依赖于图像的内容。
航空相机实际的像移补偿方式主要为光机式补偿与电子式补偿,控制系统的稳态精度对补偿的效果具有决定性影响。
本文主要讨论TDI2CCD全景式航空相机的前向像移补偿以及DSP(Digital Signal Process2 ing)实现方式。
介绍了TDI2CCD全景式航空相机像移的产生原因以及对伺服控制系统的要求;描述了前向像移补偿机构-反射镜的工作方式;讨论了使用DSP实现伺服控制中遇到的3个问题,包括算法的选择,相位的延迟,时间的约束等;最后给出了系统的软硬件结构与试验结果。
2 TDI2CCD全景式航空相机的前向像移 如文章[527]所述,前向像移是TDI2CCD全景式航空相机的一种主要像移,严重影响照相的分辨率,本节分析了前向像移的产生原因以及对伺服系统的要求。
2.1 前向像移如图1所示,在相机曝光时间内,由于飞机以速度v s飞行,地面景物A点相对于飞机向后运动到A1点,于是像点变成了一条短线,使景物模糊不清。
其中X轴为飞机的飞行方向。
图1 前向像移示意图Fig.1 Diagram of forward motion消除此像移通常是利用扫描反射镜在照相过程中产生一个附加的旋转运动来实现。
例如飞机向前飞行,假若反射镜沿像移相反方向以某一角速度作旋转运动,使图1中短线A A1等于零,则可达到完全补偿的目的。
假设飞机不动,地面景物点A相对飞机以速度v s向后运动,此时A点相对反射镜的角速度为:v sH・sinα,其中v s为飞机飞行速度,H为飞行高度,α为扫描角。
由于反射光线的转角两倍于平面反射镜的转角,因此反射镜的补偿角速度为:ωFWC=12・v sHsinα.(1)一般情况下飞机的飞行速度与飞行高度由飞机控制系统给出,而扫描角可通过正弦电位计给出。
6642 光学 精密工程 第16卷 2.2 前向像移的补偿误差如果补偿系统提出的指标过高,可能导致控制系统稳定性变差,机械加工难度增大,反馈原件的成本几十倍提高。
因此必须合理的分配每个像移补偿系统的误差范围。
伺服系统的稳态误差决定了前向像移补偿系统的残差大小,一般认为补偿后的像移残差不超过1/3像元时,不影响成像的质量。
对于工程上广泛使用的滞后超前校正算法,稳态误差的大小与系统的开环放大倍数成反比[9],在工程设计中,应在满足系统稳定的前提下,将开环放大倍数调至最大,这样即保证了伺服系统稳态的精度,也增强了系统的刚度,有利于克服各种干扰。
文章[5]给出前向像移残差表达式为:σ1=12・V sHsinα・f・t・δ1,(2)其中f为焦距,t为曝光时间,δ1为反射镜速度控制系统的补偿误差。
设v sH =0.05,α=π2,f=1m,t=2ms,像元尺寸为10μm。
如果反射镜不补偿,即δ1=100%,带来的像移残差为50μm,远大于1/3像元(3.3μm)的基本要求。
一般的速度环开环放大倍数>1000,这是较容易实现的,假如放大倍数取1000,像移残差仅为0.05μm,这给其它系统的设计装调带来较大的余量。
3 反射镜工作方式 如文献[5]所述,相机在工作时,镜筒以飞行方向为轴进行摆扫成像。
来自地物的光线与水平光轴成45°扫描反射镜,光线被扫描镜折转90°后射入照相物镜,再经照相物镜后最终成像在焦面上。
拍照时反射镜与镜筒均工作在速度环,回扫时工作在位置环。
对于任何控制系统,如达到某一速度并稳速,需要一定的时间,因此镜筒与反射镜在达到照相速度前均需要一定的启动时间[829],在二者都达到摄影速度后,开始摄影;完成摄影后,反射镜与镜筒均需回到照相起始位置,由于超调的影响,为保证位置精度,在起始位置点需保持一定的时间。
在摄影开始时刻,反射镜所需的起始补偿速度如式(1)所示,由于速高比与镜筒的扫描角均为时变的量,因此每次反射镜的摄影起始补偿速度是不同的,而镜筒拍照的扫描速度为定值,所以镜筒的摄影起始速度为固定的。
图2为一个速度系统的阶跃响应,速度在t1时刻达到稳速,针对反射镜系统,为了精确的补偿,摄影同步信号应发生在t1时刻后影同步信号发生时,速度亦应稳定在给定固定摆扫速度上,设镜筒在t2时刻达到稳速,则摄影同步信号发生时刻为max(t1,t2)。