理论力学第7章习题
- 格式:doc
- 大小:249.00 KB
- 文档页数:14

基础部分——运动学第7 章刚体平面运动连杆作什么运动呢?行星齿轮机构行星轮作什么运动?第7章刚体平面运动运动过程中,刚体上任一点到某一固定平面的距离保持不变刚体上任一点都在与某一固定平面平行的平面内运动沿直线轨道滚动的车轮机械臂小臂的运动平面运动的刚体在自身平面内运动的平面图形SxyOxyOASIIxyOA SII平面图形上任一线段的位置位置x Ay AϕB )(1t f x A =)(2t f y A =)(3t f =ϕ平面运动平移+ 转动xyOASIIxAyAϕB基点⇒O ′O O ′O O ′O′三种运动?平面运动基点平移基点转动注意:平移动系不一定固结与某一实际刚不一定固结与某一实际刚体。
O ′xyO平移动系O'x'y'x ′y ′O ′基点推广结论:刚体的平面运动可以分解为随基点的平移和绕基点的转动问题一:x yOA SIIx Ay AϕB问题二:随基点的平移与基点的选择有无关系绕基点的转动与基点的选择有无关系结论:同一瞬时平面图形绕任一基点转动的ω、α都相同。
动点re a 点的速度合成定理SAv ωABB v A v ?=B v x ′y ′基点BA v 三种运动?大小? 方向?BAA B v v v +=AωA Av BAv Bv平面图形上任一点的速度等于基点的速度与该点随图形绕基点转动速度的矢量和。
SAv ωABAv BAv Bv BAA B v v v +=试一试:基点法作平面运动。
[例7-1] 曲柄—滑块机构解:转动。
r 3ABOωϕAv Bv BAv 基点大小方向?AvBA3ABOωϕAv B v BAv Av ABω转向?= v 滑块Bϕ大小方向A 32SAv ωAB Av BAv Bv 平面图形上任意两点的速度在该两点连线上的投影(大小和正负号)相等。
速度投影定理[][]ABA AB B v v =[]ABBA vr 3再分析例7-1ABOωϕAv Bv Bv解:请比较两种方法A 32如何解释这种现象?观察到了什么现象?[先看一照片]若选取速度为零的点作为基点,则求解速度问题•基点法•速度投影法优点:缺点:优点:缺点:SAv ωAv BAv Bv AA 为基点B有没有更好的方法呢?Aω0≠ω唯一存在AL ′证明:MAA M v v v +=SA v v MAv LMPωAv PA =∴0=⋅−=ωPA v v A P ∵该瞬时瞬时速度中心速度瞬心唯一性:瞬时性:不共线,故速度均不为零。



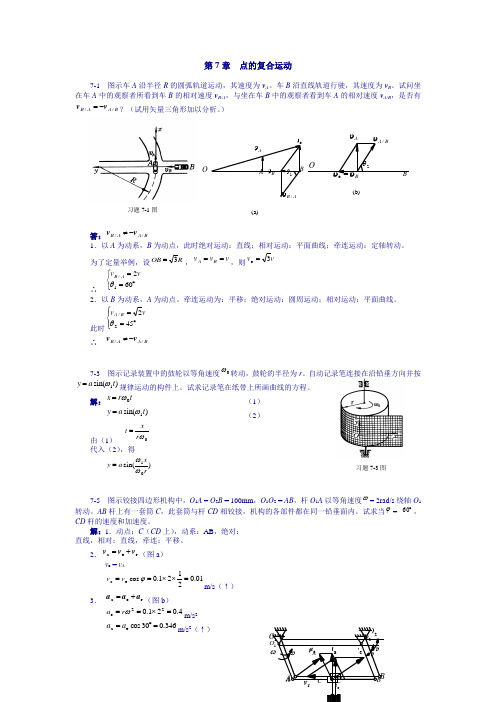
习题7-1图Oυ(a)υυ(b)习题7-3图第7章 点的复合运动7-1 图示车A 沿半径R 的圆弧轨道运动,其速度为v A 。
车B 沿直线轨道行驶,其速度为v B 。
试问坐在车A 中的观察者所看到车B 的相对速度v B /A ,与坐在车B 中的观察者看到车A 的相对速度v A /B ,是否有B A A B //v v -=?(试用矢量三角形加以分析。
)答:B A A B //v v -≠1.以A 为动系,B 为动点,此时绝对运动:直线;相对运动:平面曲线;牵连运动:定轴转动。
为了定量举例,设R OB 3=,v v v B A ==,则v v 3e =∴ ⎩⎨⎧︒==6021/θv v A B2.以B 为动系,A 为动点。
牵连运动为:平移;绝对运动:圆周运动;相对运动:平面曲线。
此时⎪⎩⎪⎨⎧︒==4522/θv v B A ∴ B A A B //v v -≠7-3 图示记录装置中的鼓轮以等角速度0ω转动,鼓轮的半径为r 。
自动记录笔连接在沿铅垂方向并按)sin(1t a y ω=规律运动的构件上。
试求记录笔在纸带上所画曲线的方程。
解:t r x 0ω= (1) )sin(1t a y ω=(2)由(1)0ωr xt =代入(2),得)sin(01r xa y ωω=7-5 图示铰接四边形机构中,O 1A = O 2B = 100mm ,O 1O 2 = AB ,杆O 1A 以等角速度ω= 2rad/s 绕轴O 1转动。
AB 杆上有一套筒C ,此套筒与杆CD 相铰接,机构的各部件都在同一铅垂面内。
试求当ϕ= ︒60,CD 杆的速度和加速度。
解:1.动点:C (CD 上),动系:AB ,绝对:直线,相对:直线,牵连:平移。
2.r e a v v v +=(图a ) v e = v A01.02121.0cos e a =⨯⨯==ϕv v m/s (↑)3. r e a a a a +=(图b )4.021.022e =⨯==ωr a m/s 2 346.030cos e a =︒=a a m/s 2(↑)习题7-5图习题7-7图习题7-9图υ(a) (b)(a)7-7 图示瓦特离心调速器以角速度ω绕铅垂轴转动。
7-1以汽车A 为动点,动参考系建立在汽车B 上11140v v km s v -==⋅==1v v i牵连运动是平动22122122cos 45sin 4545454040cos sin cos 45sin 45cos sin cos 45cos 0sin 45sin 4040cos 040sin 40,0,40r r r r r r r r r v v v v v v v v v v v v v v v v v km hααααααααα-==-=-=-=+=+=-++=+=-+=+=-+===⋅e 2r e rr v v i j i j i j v i j v v v i i j i j v i17-2以船为对象,动系建立在河上,牵连运动是平动 (a )0.5,0.50.5,10.5,1000,1000500x y v v x t y t y m t s x ===+=+=======e r e r v i v j v v v i j(b)1cos sin 0.5cos sin 0.5sin 0.50,cos 30,22,10001155e v v vv s x vt t sααααααα-==+==+++===-=⋅==⨯=r r ev iv i j v j v =v +v i i j j7-3以种子为动点,以地面为静系,动系建立在播种机上,并忽略重力加速度的影响。
牵连运动是平动。
()()12222112121,01cos60,sin602211122222222.65cos,,arccos405336.22ex eyrx ryx ex rxy ey ryv v vv v v v vv v v v v m sv v v v sv m sx x---=======+=+=+⨯=⋅=+===⋅====⋅'''===v v0.25,20.29yxyy m tvx v t m=====⨯=7-4以砂石为动点,动系建立在传送带B上,牵连运动为平动1122,sin304sin302cos304cos30 3.464cos152cos15 1.932sin152sin150.5182 1.9320.0683.4640.518 3.9823.983xyexeyrx x exry y eyrv vv vv vv vv v vv v vv m s============-=-=-=-==-=+====⋅e21v=v v=v()13.982,arccos1172.153.983ry-'''==v当相对速度与牵连速度垂直时1cos754cos75 1.035ev v m s-===⋅7-5AB为平动,以A为动点,动系建立在三角块上,牵连运动为平动()()cos0,sintan tantaneAr e A rA eB Av vv v v vv v vv v vααααα==-====↑==↑e rv v+v以滑块A 为动点,动系建立在BC 上,牵连运动为平动()sin ,cos ,cos 60,sin 60,,0,,sin cos 60cos sin 60cos 60sin cos cos 60sin 60sin 600,cos 60sin 60A A x A y rx r ry r exBC ey A x ex rx A y ey ry r B C r B CB C v r v r v r v v v v v v v v v v v v v r v v r v r v r r v ωωϕωϕωϕωϕωωϕϕϕωϕ========+=+=+=⎛⎫=-=-+ ⎪⎝⎭==-=330,cos 900sin 6060,cos 120sin 603B C B C r r v r v r ωωϕωϕω-==-===-=7-7AB 平动,以A 点为动点,动系建立在摇杆上,牵连运动是定轴转动00.4sin 6030.5330.8sin 60,sin 603e e C e C O C v O C v v v v ω====⨯====AB 为平动,1110.0510.8 5.330.050.053O A B CC O v v v rad sωω-====⨯=⋅7-8以套筒A 为动点,动系建立在O 1D 上,牵连运动是定轴转动00111100011,2sin 302sin 30,2,224A e e A O A v O A l O A lv O A l l l v v l ωωωωωωωωω==========以套筒B 为动点,动系建立在O 1D 上,牵连运动是定轴转动,BC 为平动111004, 1.155cos 301.155e e B BC B v v O B l l v l v v l ωωωωω========BC 平动,以B 为动点,动系建立在凸轮上,牵连运动为平动1sin 30,cos 30cos 30 1.039sin 30r A e A r B B A A v v v v v v v v m s-=======⋅112222sin 30,cos 30cos 30 1.039sin 3020.6 1.2sin 301.24.80.3cos 60cos 30cos 3022 4.80.88.214cos 60r A e A r B B A A A r r rn B A rn rn A B rn A v v v v v v v v m sv v m sv a m sra a a a a a a m s----=======⋅==⨯=⋅===⋅+=-==-=⨯-=⋅7-10以套筒C 为动点,动系建立在AB 上,CD 、AB 都是平动1221212,,0.10.2,0.10.4,0cos cos 0.2cos 600.1sin 600.4sin 600.3460.1,0.346e A e A A A n A t C e A C A n C D C C D C v m s a m s a v v v m sa a m s v v m s a a m sωωϕϕ------====⋅==⋅=====⋅====⋅==⋅==⋅v v a a7-11以套筒A 为动点,动系建立在CD 上,牵连运动是平动()()2122222,cos cos ,sin sin ,sin 2sin 20.14sin 30 1.26,0,cos 2cos cos 21cos 2cos cos cos 20.A A A n A r r A A e r e C D A r A n A t rrn A n e rn A n rne C D v R a a R v v v v R v v v v v v v R m sa R a v a R Ra a a R a a a a R ωωϕϕωϕϕϕωϕπωωϕϕωϕϕϕϕωϕ-=======-==+==⨯⨯=⋅=====-++=====⨯()2214cos 3027.35m sπ-⨯=⋅以销钉为动点,静系建立在地面上,动系建立在CD 上,牵连运动是平动122122111111121112,,,,e e r r r r r e r r e r v a v a v v a a =======+=+=+=+v v j a a j v i a i v v v i j a a a i j以销钉为动点,静系建立在地面上,动系建立在AB 上,牵连运动是平动211122222222122212121212121111111121112,,,,,,100,ee r r rr r e r r e r r r r r r rr e r e v a v av v a a v v v v a a a a v v a a v v v m m sa a a -=======+=+=+=++=++=+===+=+===⋅=+=+==v v i a a i v j a j v v v i j a a a i j i j i j i j i j v v v i j a a a i j 222.36m m s-=⋅7-13以水点为动点,静系建立在地面上,动系建立在水枪上,牵连运动是定轴转动()()1122111221111,,,0,,,22222r r e en et r e e r cr e en c r e r c v v a a v r a r a v a r v v r a v a r v a ωωωωωωωωω=====⊥===++===-=⨯=⨯==++=-++=-+==v v a a a a a i a a i a ωv k i ja a a a i i j i j7-14以M 为动点,静系建立在地面上,动系建立在圆盘上,牵连运动是定轴转动()()()22222222,,2222,e r e r c e r e e et en r r rt rn rn c r rt rt rt r rt rn r r r r r v a a a r rr r r r a r r r a a r a a r r a ωωαωωωωωαωωωαααω=+==++===-=-=+=+=+===⨯=⨯-=-=+++-=+==-=+=-+==v v v 0a a a a 0v i v v ia a a i j a i j a ωv k i j a i j i j j 0i 0a i j i j7-15以M 为动点,静系建立在地面上,动系建立在圆盘上,牵连运动是定轴转动()122,sin 45cos 45sin 45cos 45894,,sin 45cos 45r r e r e r r r r rt rn r et en v A M A M r r v r r v r r v m m sv v rrr r ωωωωωωωωωωαααα-==-=-=-=+=+-=+-===⋅==-=-=+=-+=v i v i j i j i jv v v i i j i j a 0a j a ja i j i j a()()()2222222222222cos 45sin 452222240020042002200420022240016002400200c r r r r r e c r r r r r v v v r r r r v rv r r r r v r a ωωωωωωααωωωαωαωω+=-+=⨯=⨯==++=--+-++⎛⎫=--+-+++ ⎪⎝⎭⎛⎫=-⨯-⨯+-+⨯+⨯+⨯⨯=-+ ⎪⎝⎭=i j i ja ωv k i j a a a a j i j i j ji ji j i j22884m m s-=⋅7-16以M 为动点,静系建立在地面上,动系建立在AB 上 (1)sin 2cos 2cos sin 2cos sin 2cos cos sin 2cos 2cos sin 2cos sin 2cos cos sin 2cos 2cos sin cos 2sin 2cos cos r er r r e r r r r v v v v R R v v v v R R v v R v v R θθθθωθθωθθθθθθωθθωθθθθωθθθθωθθ=-=+=--=++-=+-=-v i j v i jv i ji j i j i j代入数值,联立求解得()211sin 2cos 2cos sin cos 2sin 2cos sin 2cos sin 22sin 220.5222sin 20.52sin 301r r r r r v v R v v R v v R v v R v R m sv R m sθθωθθθθωθθθωθωθωωθ--=+-=-=+=-==⨯⨯=⋅==⨯⨯⨯=⋅()()22222cos 3020.52cos 302cos 3020.52cos 30280.522cos 30sin 3024r e cen et n c r r r c a R a R va Rv v a ωαω=++==⨯⨯===⨯⨯======-⨯+=-+==a a a a a ω×v k i j i向n a 方向投影()()())cos 30sin 308cos 304sin 301n en r et c r r a a a a a a a =-++=-+=-向t a 方向投影()()((2cos 30sin 304cos 301sin 3028.246t c et r en a a a a a a m s-=++-=++--====⋅7-17动系建立在OA 上,牵连运动和相对运动都是定轴转动 M 点2111222222222212121333100410066001006360010044003300448003300390022410064800r e rn rt en et c r v r v r r m m s a r m ms a r m m sa r m m s a r m m sav m m s a ωωωωαωαω------==-=⨯⨯-⨯=⋅==⨯=⋅==⨯=⋅==⨯=⋅==⨯=⋅==⨯⨯⨯=⋅==23635m m s-=⋅N 点2112222222221182510063600100440043r e rn rt en et v r v v m m sa r mm s a r m m s a m s a ωωωαωα----======⋅==⨯=⋅==⨯=⋅===⋅==2212224100648003448c r m sa v m m sa m m sω---=⋅==⨯⨯⨯=⋅====⋅7-18以滑块D 为动点,动系建立在CE 上,ABD 平动,牵连运动是定轴转动111222220.250.2520.5,cos600.250.5sin600.520.5sin600.8660.250.25210.5220.250.4332cos600.50.433re C Ee C EC Ennet C Ec C E rn et cC Ev m s v v m svv vrad sa m saa v m sa a am sωωωωωαωα------==⨯=⋅==⋅====⨯=⋅===⨯=⋅==⨯=⨯⨯=⋅=+=⋅-a a2220.50.0670.134C Em s m srad sα---⋅=-⋅=-⋅7-19以M为动点,动系建立在ACB上,牵连运动是平动1111111111100120eeM r e r rM r e r rv va av v va a a===+=+=+=+=+=+v v v i j i ja a a i j i j以M为动点,动系建立在板上,牵连运动是定轴转动20222222222222202100100cos60sin6022100cos60100sin6050502250100,10021001001100100sin60100cos6050 er rr r rer rrre e nevvv vvvva aωω===+=+=+=+⎛⎫⎛⎫=++ ⎪⎪ ⎪⎝⎭⎝⎭+=====⨯==-+=-+v i j i jv i j iv i ja i j j2222222222222222sin60cos60cos60sin60 22221001005022r r n r n r t r tr t r n r n r trrr nr t r tra a a aa avaa=-+++⎛⎫⎛⎫=-++⎪ ⎪⎪ ⎪⎝⎭⎝⎭==⎛⎫⎛=-++⎪⎪⎝⎝⎭a i j i j a i ja i j()02222 2cos60sin60100100505022c r rr t r t Mv vaω=⨯+=-+⎛⎫⎛=-+-++-++⎪⎪⎝⎝⎭a k i j ja j j i j22122 122210050221201005050221202240932.82938r rrr t r t rr tr trvvaaaaaa⎛⎫⎛⎫+=++ ⎪⎪ ⎪⎝⎭⎝⎭⎛⎫⎛+=-+-++-++⎪⎪⎝⎝⎭=-+-=+=====i j i ji j j j i j1015=联立求解得7-20用运动方程解()()()()122122112212222222cos sincos sin3,410,64,82,2cos sin sin cos364cos2sin82sin2cos364cos2234sin28MMxx x x yy y y xdx dy dx dy dt t tdt dt dt dt dtdx dx dyd dv x ydt dt dt dt dtt x t yt t t t t tϕϕϕϕϕϕϕϕϕϕϕϕϕϕϕ=+-=++==-=+=-==+---=++----=++-+-()() ()()2222sin2242cos2 38104cos26162sin2t t t t t t t t t t---=----+-()()()()()()122222222cos sin sin cos41082cos2242sin264sin2234cos2 4106162cos28104sin2ydy dy dxd dv y xdt dt dt dt dtt t t t t t t t t t tt t t t t t tϕϕϕϕϕϕ=+-++=-+---++++=-++-+-++用点的合成运动的方法解决静系为oxy,动系为111o x y,牵连运动是平动M点的相对坐标是2222cos sinsin cosrrx x yy x yϕϕϕϕ=-=+()()()()()()()()()()()2222112222228104cos 6162sin 8104sin 6162cos 341034108104cos 6162sin 8104sin 6162cos 38104cos 616r e t t t t t t t t dx dy t dtdtt t t t t t t t t t t t t ϕϕϕϕϕϕϕϕϕ⎡⎤=-++-+-⎣⎦⎡⎤+-++++-⎣⎦=+=+-=+-⎡⎤+-++-+-⎣⎦⎡⎤+-++++-⎣⎦=+-++-+v ij v i j i jv i ji j ()()()()()()()()()()()22222222222sin 4108104sin 6162cos 38104cos 6162sin 38104cos 26162sin 24108104sin 6162cos 4108104sin 26162cos 2x y t t t t t v t t t t t t t t t tv t t t t t t t t t t t tϕϕϕϕϕϕϕ⎡⎤-⎣⎦⎡⎤+-+-++++-⎣⎦=+-++-+-=+-++-+-=-+-++++-=-+-++++-i j两种方法做的结果是一样的 7-21以M 为动点,静系建立在地面上,动系建立在板上,相对运动和牵连运动都是定轴转动 速度分析()505015021,33100310035050cos sin cossin26.1845.34333352.36sin 100100sin 0.5100100sin 0.5213.43313.4r r r r r e e e ds s t v dt r v v v v r r t v ππππϕππππϕϕππϕω⨯====⨯=⨯==-+=-+=-+==⎛⎫⎛⎫=-=-⨯=-⨯⨯= ⎪ ⎪⎝⎭⎝⎭=-=-v i j i j i jvk 45.3426.185054.04r e v =+=-+-==kv v v i j k加速度分析222222252.360,27.4110027.41sin27.41cos23.7413.7133sin 13.40.5 6.7313.413.413.46.713.40.526.1845.342226.1rr rt rn r et een e r c r v v d s a a dtrd a r r dt v a t ρπππωρω=======+=+⎛⎫=-=⨯= ⎪⎝⎭====--====-+=⨯=⨯-a i j i ja k i ωj j j v i ja ωv j ()845.3452.3623.7413.71 6.713.452.3610.3413.7145.6648.78r e ca +==++=+--+=++==i j k a a a a i j k i k i j k7-22以M 为动点,静系建立在地面上,动系建立在AB 上,相对动和牵连运动都是定轴转动222sin 30cos 30220,cos 30sin 3022r r r rt rn r rn rn v vv v v v va a rrv va a rr==-+=-+====--=-+v i j i ja i j i j()22222222250,2sin 30252222252225222et en e en c r r e c a a r r r a r v vvr rrvv r rr a ωωωωωωωωωω==+==-=-=⎛⎫=⨯=⨯-+= ⎪ ⎪⎝⎭=++=-+-+⎛⎫=-+-+ ⎪⎝⎭==a j jωia ωv i i j a a a a j j i j7-23以A 为动点,静系建立在地面上,动系建立在杆上()()()()1115000.5785.4,cos sin 5000.5cos 30sin 30680.17392.7sin 30505000.50.5150150471.24680.17392.7471.24915.92r r e e r e rt v l l v e l v a l ωπωθθπωπππα==⨯==-=⨯-=-=+=+⨯⨯====+=-+===v j +k j +k j +k v i iv v v j +k i()()()()()()()()()22125000.42005000.51233.7cos 30sin 30sin 30cos 30200cos 30sin 301233.7sin 30cos 30443.641168.42sin 3050500sin 301300sin 3050500sin 300rn r rt rn et en a l a a a e l a e l ωπαω=⨯===⨯==-+=-+==+=+⨯==+=+⨯a j +k j +k j +k j +k j +k()()2.5740.22300740.220.5220.5680.17392.72136.82443.641168.42300740.222136.822436.821183.861168.422950.39e et en c r r e c a a a πωππ==+=+===⨯=⨯⨯-==++=+++=+==a i j i j ωk ka ωv k j +k i a a a a j +k i j i i j +k7-24以M 为动点,静系建立在地面上,动系建立在杆上,相对运动是平动,牵连运动是定轴转动()230200sin 100cos 022100cos 50sin 493.4822,493.48sin 30493.48cos 30246.74427.372260sin 3030200sin 302115722.57606072r r r r r e e dx d v t t dt dt dv d a t t dtdt n v x ππππππππππ'⎛⎫==+== ⎪⎝⎭⎛⎫===-=- ⎪⎝⎭=--=--⨯'==+=⨯==-v =0a j k j k v()()2222.57722.57722.5702260sin 3030200sin 3021154540606045400246.74427.3745404786.74427.374805.78e et enen c v a n a x a a πππ==-==⨯⎛⎫⎛⎫'==+=⨯= ⎪ ⎪⎝⎭⎝⎭=-==---=--==j v v j a j a j k j j k。