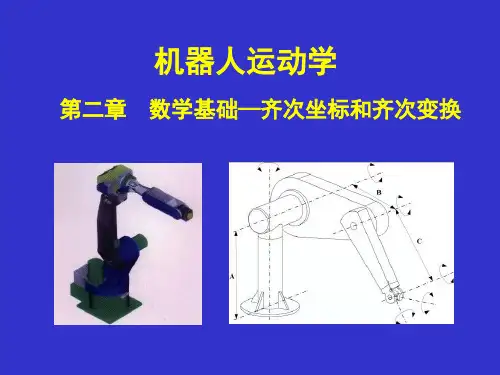
机器人学之齐次变换
- 格式:ppt
- 大小:2.81 MB
- 文档页数:62

归纳总结机器人的坐标变换的类型摘要:一、机器人坐标变换的重要性二、机器人坐标变换的类型1.齐次变换2.旋转矩阵变换3.线性变换4.非线性变换三、各类坐标变换的应用场景四、坐标变换在机器人编程与控制中的作用五、总结与展望正文:一、机器人坐标变换的重要性在机器人技术中,坐标变换起着至关重要的作用。
它为机器人编程和控制提供了方便,使得机器人在执行任务时能够准确地定位和执行相应的操作。
坐标变换是将机器人从一个坐标系转换到另一个坐标系的过程,它有助于实现机器人末端执行器在不同坐标系下的定位和运动控制。
二、机器人坐标变换的类型1.齐次变换:齐次变换是一种将机器人从源坐标系变换到目标坐标系的方法,它通过一个4x4的齐次矩阵实现。
齐次变换可以保持机器人的姿态不变,仅改变其位置。
2.旋转矩阵变换:旋转矩阵变换主要用于将机器人的姿态从源坐标系变换到目标坐标系。
通过旋转矩阵,可以实现机器人末端执行器在不同坐标系下的旋转。
3.线性变换:线性变换是将机器人从一个坐标系变换到另一个坐标系的一种方法,它包括平移和缩放两个过程。
线性变换可以实现机器人末端执行器在不同坐标系下的位置和尺寸变化。
4.非线性变换:非线性变换是指在变换过程中,机器人坐标系之间的转换关系不是线性的。
非线性变换通常用于处理机器人运动过程中的摩擦力、弹簧力等非线性因素。
三、各类坐标变换的应用场景各类坐标变换在机器人技术中有着广泛的应用。
例如,在工业机器人中,齐次变换和旋转矩阵变换用于实现机器人末端执行器的定位和姿态控制;线性变换则用于处理机器人末端执行器在不同坐标系下的尺寸变化。
在机器人导航和路径规划中,非线性变换有助于解决机器人运动过程中的非线性约束。
四、坐标变换在机器人编程与控制中的作用坐标变换在机器人编程与控制中起到了关键作用。
通过对机器人进行坐标变换,可以使机器人更好地适应不同的工作环境,提高其在各种任务中的性能。
同时,坐标变换为机器人编程提供了便利,使得开发者可以更轻松地编写机器人控制程序,降低机器人编程的难度。


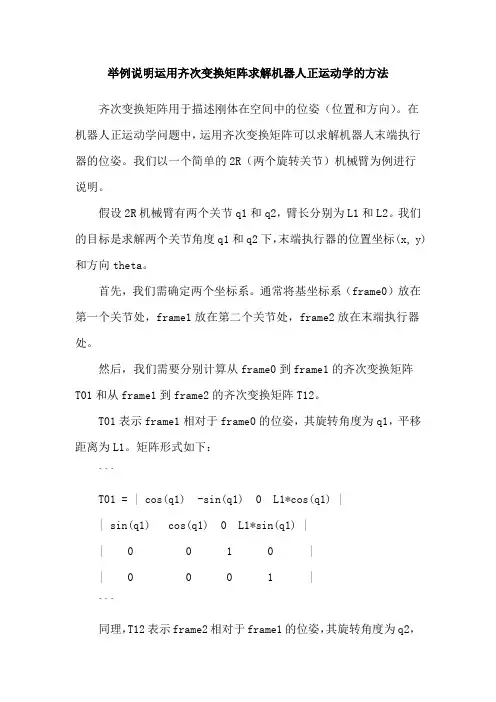
举例说明运用齐次变换矩阵求解机器人正运动学的方法齐次变换矩阵用于描述刚体在空间中的位姿(位置和方向)。
在机器人正运动学问题中,运用齐次变换矩阵可以求解机器人末端执行器的位姿。
我们以一个简单的2R(两个旋转关节)机械臂为例进行说明。
假设2R机械臂有两个关节q1和q2,臂长分别为L1和L2。
我们的目标是求解两个关节角度q1和q2下,末端执行器的位置坐标(x, y)和方向theta。
首先,我们需确定两个坐标系。
通常将基坐标系(frame0)放在第一个关节处,frame1放在第二个关节处,frame2放在末端执行器处。
然后,我们需要分别计算从frame0到frame1的齐次变换矩阵T01和从frame1到frame2的齐次变换矩阵T12。
T01表示frame1相对于frame0的位姿,其旋转角度为q1,平移距离为L1。
矩阵形式如下:```T01 = | cos(q1) -sin(q1) 0 L1*cos(q1) || sin(q1) cos(q1) 0 L1*sin(q1) || 0 0 1 0 || 0 0 0 1 |```同理,T12表示frame2相对于frame1的位姿,其旋转角度为q2,平移距离为L2。
矩阵形式如下:```T12 = | cos(q2) -sin(q2) 0 L2*cos(q2) || sin(q2) cos(q2) 0 L2*sin(q2) || 0 0 1 0 || 0 0 0 1 |```接下来,我们需要计算从frame0到frame2的齐次变换矩阵T02。
通过矩阵乘法,我们可以得到:```T02 = T01 * T12```最后,我们从T02矩阵中提取机器人末端执行器的位置和方向。
位置坐标(x, y)就是T02矩阵中的平移部分,即:```x = T02[0][3]y = T02[1][3]```方向theta可以通过以下公式计算:```theta = atan2(T02[1][0], T02[0][0])```所以,通过齐次变换矩阵,我们可以求解出机器人末端执行器的位置和方向,从而解决2R机械臂的正运动学问题。

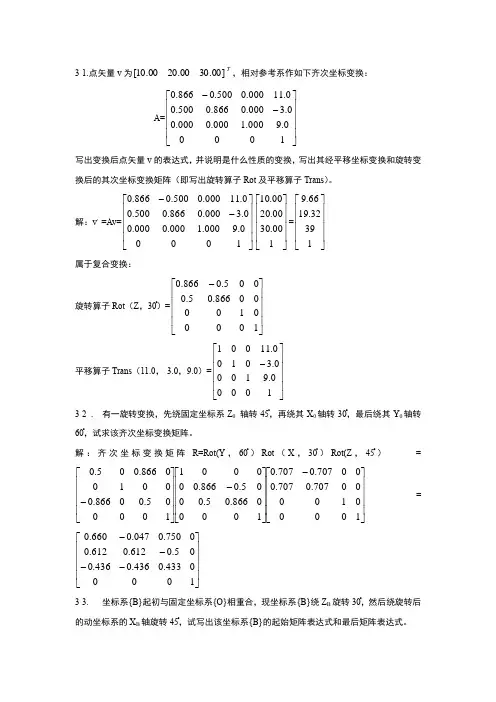
3-1.点矢量v 为]00.3000.2000.10[T,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出其经平移坐标变换和旋转变换后的其次坐标变换矩阵(即写出旋转算子Rot 及平移算子Trans )。
解:v ,=Av=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡100.3000.2000.10=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡13932.1966.9 属于复合变换:旋转算子Rot (Z , )=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-1000010000866.05.0005.0866.0 平移算子Trans (11.0,-3.0,9.0)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-10000.91000.30100.110013-2 . 有一旋转变换,先绕固定坐标系Z 0 轴转 ,再绕其X 0轴转 ,最后绕其Y 0轴转 ,试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y , )Rot (X , )Rot(Z , ) =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-100010000707.0707.000707.0707.010000866.05.0005.0866.000001100005.00866.000100866.005.0=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----10000433.0436.0436.005.0612.0612.00750.0047.0660.0 3-3. 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转 ,然后绕旋转后的动坐标系的X B 轴旋转 ,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。

利用齐次矩阵表示旋转加平移变换把上述两种变换结合起来用齐次矩阵表示,这时的齐次变换矩阵就是⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==10000cos sin 00sin cos 000011000100010001),(),,(θθθθθc b a X Rot c b a Trans H ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000cos sin 0sin cos 0001c b a θθθθ可见,在齐次变换矩阵中旋转矩阵和表示平移的列阵 确实是分离的。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-1000cos sin 0sin cos z z z z θθθθ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1c b a 注意,一般情况下)90,()90,()90,()90,(0000X Rot Y Rot Y Rot X Rot ≠利用齐次矩阵表示手的转动和移动手的转动可以表示为绕X 轴的侧摆 , 绕Y 轴的俯仰和绕 Z 轴横滚 , 依次构成的复合转动 ,采用简化符号 , 则有),(x X Rot Φ),(y Y Rot Φ),(z Z Rot Φ),,(x y z RPY ΦΦΦsin cos,==s c ),(),(),(),,(x y z X Y Z X Rot Y Rot Z Rot RPY ΦΦΦ=ΦΦΦ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦ-Φ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦ-ΦΦ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦ-Φ=100000000001100000001000100001000000xx x x y y y y z z z z c s s c c s s c c s s c⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦΦΦ-ΦΦ-ΦΦΦΦΦ+ΦΦΦΦΦΦΦ+ΦΦΦΦΦ-ΦΦΦΦΦ=1000000xz xy y x z x y z x z x y z y z x z x y z x z x y z y z c c s c s s c c s s c c s s s c s s s c s c c s s s c c c ),(),(),(),,(x y z X Y Z X Rot Y Rot Z Rot RPY ΦΦΦ=ΦΦΦ上式表示了手的转动运动。