机械创新设计试卷
- 格式:doc
- 大小:63.50 KB
- 文档页数:6
机械创新设计试题及答案1.A3图幅的尺寸是()[单选题] *A.420×594 mmB.297×210 mmC.420× 297mm(正确答案)D.297×594 mm2.已知图纸比例为5:1,图纸上测量长度为62.5,标注长度为20,该特征的实际长度为()[单选题] *A.100B.62.5C.20(正确答案)D.253.各种图线重合时,线型的选用顺序为()[单选题] *A.粗实线>虚线>点画线(正确答案)B.点画线>粗实线>虚线C.点画线>虚线>粗实线D.粗实线>点画线>虚线4.以下说法正确的是()[单选题] *A.标题栏中的字体为草书字体B.图框格式中必须预留装订边C.图形大小与机件真实大小相同D.图样尽量采用1:1的比例(正确答案)5.图中尺寸标注正确的是()[单选题] *A.AB.BC.C(正确答案)D.D6.绘制物体轴线及对称中心线采用的线型为()[单选题] *A.粗实线B.虚线C.双点画线D.细点画线(正确答案)7.以下说法有错误的是()[单选题] *A.在较小的图形上可以用细实线代替细点画线B.点画线和虚线重合时,按先点画线后虚线的顺序选用(正确答案)C.物体的真实大小与图形大小和准确程度无关D.尺寸界限过尺寸线2-3mm8.图纸以1:1比例打印,标题栏内显示比例为1:2,用直尺测得一尺寸为20,对应零件的实际尺寸为()[单选题] *A.20mmB.40mm(正确答案)C.10mmD.20cm9.关于尺寸标注说法错误的是()[单选题] *A.尺寸界限可以用轮廓线或轴线代替B.尺寸线可以用轮廓线或轴线代替(正确答案)C.每一尺寸在图样中一般只标注一次D.物体的真实大小只与图样上的尺寸标注有关10.以下标注正确的是()[单选题] *A.AB.BC.CD.D(正确答案)11.以下几组尺寸为定形尺寸的是()[单选题] *A.R12、6B.110、6C.R12、Φ12(正确答案)D.110、R2412.以下尺寸为连接尺寸的是()[单选题] *A.SR8B.R60C.R20(正确答案)D.Φ3013.作圆弧连接,求圆心方式错误的是()[单选题] *A.A(正确答案)B.BC.CD.D[单选题] *A.6(正确答案)B.24C.R11D.R24[单选题] *A.SR8B.SR15C.Φ5D.R20(正确答案)16.当前所示图纸为()[单选题] *A.中心投影法(正确答案)B.正投影法C..斜投影法D以上都不是17.图中属于正投影法的是()[单选题] *A.AB.B(正确答案)C.CD.D18.图中反应正投影实形性的是()[单选题] *A.A(正确答案)B.BC.CD.D19.本图反应正投影的()[单选题] *A.实形性(正确答案)B.积聚性C.类似性D.以上都不是20.图中反应正投影类似性的是()[单选题] *A.AB.BC.C(正确答案)D.D[单选题] *A.正面V(正确答案)B.水平面HC.侧面WD.以上都不是[单选题] *A.正面VB.水平面H(正确答案)C.侧面WD.以上都不是[单选题] *A.长(正确答案)B.宽C.高D.以上都不是[单选题] *A.长B.宽C.高(正确答案)D.以上都不是[单选题] *A.左右关系B.前后关系(正确答案)C.上下关系D.以上都不是26.与三视图对应的立体示意图,正确的是()[单选题] *A.AB.BC.C(正确答案)D.D27.与立体示意图对应的三视图,正确的是()[单选题] *A.A(正确答案)B.BC.CD.D[单选题] *A.AB.BC.C(正确答案)D.D[单选题] *A.AB.B(正确答案)C.CD.D[单选题] *A.A(正确答案)B.BC.CD.D[单选题] *A.AB.BC.CD.D(正确答案)[单选题] *A.AB.BC.C(正确答案)D.D[单选题] *A.AB.BC.C(正确答案)D.D[单选题] *A.AB.B(正确答案)C.CD.D[单选题] *A.AB.BC.C(正确答案)D.D[单选题] *A.A(正确答案)B.BC.CD.D[单选题] *A.AB.BC.C(正确答案)D.D38.图中反应正投影积聚性的是()[单选题] *A.AB.B(正确答案)C.CD.D[单选题] *A.实形性B.积聚性(正确答案)C.类似性D.以上都不是[单选题] *A.实形性B.积聚性C.类似性(正确答案)D.以上都不是41.图示三投影面体系,左视图所在的投影面是()[单选题] *A.正面VB.水平面HC.侧面W(正确答案)D.以上都不是42.根据三视图之间的投影对应关系,图中所示三视图中(1)、(2)、(3)的投影规律分别为()[单选题] *A.长对正、宽相等、高平齐B.长对正、高平齐、宽相等(正确答案)C.宽相等、长对正、高平齐D.宽相等、高平齐、长对正[单选题]A.长B.宽(正确答案)C.高D.以上都不是[单选题] *A.左右关系(正确答案)B.前后关系C.上下关系D.以上都不是[单选题] *A.左右关系B.前后关系C.上下关系(正确答案)D.以上都不是46.与三视图对应的立体示意图,正确的是()[单选题] *A.AB.BC.CD.D(正确答案)47.与立体示意图对应的三视图,正确的是()[单选题] *A.AB.B(正确答案)C.CD.D48.已知物体的主视图和俯视图,正确的左视图为()[单选题] *A.AB.BC.C(正确答案)D.D49.已知物体的主视图和俯视图,正确的左视图为()[单选题] *A.AB.BC.CD.D(正确答案)50.已知物体的主视图和俯视图,正确的左视图为()[单选题] *A.A(正确答案)B.BC.CD.D。
机械创新竞赛试题与答案一、选择题(每题2分,共10分)1. 机械设计中,下列哪个因素不是影响机械效率的主要因素?A. 摩擦B. 材料强度C. 载荷大小D. 机械结构答案:B2. 在机械传动中,齿轮传动的主要优点是什么?A. 结构简单B. 传动比准确C. 噪音大D. 维护方便答案:B3. 以下哪个不是机械创新设计的基本方法?A. 逆向思维B. 类比法C. 经验法D. 组合法答案:C4. 机械设计中,为了提高零件的疲劳强度,通常采用以下哪种方法?A. 增大零件尺寸B. 增加表面粗糙度C. 采用表面硬化处理D. 减少材料强度答案:C5. 机器人技术中,关节机器人的自由度是指什么?A. 机器人可以移动的方向数B. 机器人可以转动的轴数C. 机器人的传感器数量D. 机器人的控制复杂度答案:B二、简答题(每题10分,共20分)1. 请简述机械创新设计的重要性。
答案:机械创新设计是推动机械工程领域发展的关键。
它不仅能够提高机械设备的性能,降低成本,还能满足市场对新产品的需求,提升企业的竞争力。
创新设计包括对现有机械结构的改进、新材料的应用、新工艺的开发等,是实现技术进步和产业升级的重要途径。
2. 列举三种常见的机械传动方式,并简述其特点。
答案:常见的三种机械传动方式包括:- 齿轮传动:具有传动比准确、结构紧凑、效率高等优点,适用于传递较大功率和精确控制的场合。
- 皮带传动:结构简单,成本低廉,适用于远距离传动和需要柔性连接的场合。
- 链传动:承载能力强,传动稳定,适用于高速、大功率的传动场合。
三、设计题(每题30分,共30分)1. 设计一个简单的机械装置,用于将水平方向的力转换为垂直方向的力。
答案:可以设计一个杠杆装置,其基本原理是利用杠杆的力臂原理来转换力的方向。
具体设计可以包括一个支点、一个水平方向的力输入杆和一个垂直方向的力输出杆。
当水平方向的力作用于输入杆时,通过杠杆原理,输出杆将产生垂直方向的力。
四、分析题(每题40分,共40分)1. 分析机械创新设计过程中可能遇到的挑战,并提出解决方案。
《机械创新设计》试卷考试时间:90分钟一、填空题(20分)(1′×20)1、创新就是创造和创新。
它是集科学性、技术性、社会性、经济性于一身,并贯穿于科技技术实践、生产经营实践和社会活动实践的一种横向性实践活动。
P112、创造性思维的形成大致可分为酝酿准备阶段、潜心加工阶段、顿悟阶段三个阶段。
P233、平面连杆机构是由若干构件通过低副连接而成的平面机构,它们在各种机械和仪器中获得了广泛的应用。
P234、控制系统按照原理可分为开环控制系统和闭环控制系统。
P605、TRIZ的含义是发明问题解决理论。
P886、每个技术系统的进化都是按照生物进化的模式进行的,一般经历以下几个阶段诞生期、成长期、成熟期、衰退期。
P907、从系统论的观点来看,功能是系统的输入和输出间的关系。
从性能的观点来看,功能是物理行为的抽象。
P1178、机构原理的移植主要有啮合原理的移植、差动原理的移植和谐波转动原理的移植等。
P1549、并列式机构组合的特点是运动并行传递。
P16410、仿生机械是模仿生物的形态结构和控制原理,设计、制造出的功能更集中、效率更高并具有生物特征的机械。
P264二、选择题(15分)(3′×5)1、如图所示的瑞士军刀采用哪种创新组合方法(B )A、形式组合B、功能组合C、同类组合2、功能设计法的正确步骤为(C )A、求总功能——总功能分解——系统原理解——求功能元——求功能元解B、总功能分解——求总功能——系统原理解——求功能元——求功能元解C、求总功能——总功能分解——求功能元——求功能元解——系统原理解3、思维有哪些特性(A )A、思维的自觉性和创造性B、思维的强制性C、思维的单一性4、组合创新方法有哪些(A )A、功能组合、材料组合B、机电组合、机液组合C、结构组合、原理组合5、二次设计包括(C )A、反求设计B、机构设计C、开发设计三、名词解释(20分)(4′×5)1、定向思维基本上属于逻辑性思维一类。
机械创新设计试卷(2)
一、 利用发散思维的方法写出茶杯的可能用途。
(按用途的分类与总数量的结果评分)(10分)
二、 请尽量多的写出螺旋机构的实际应用功能及变异功能,以及可以再开发的新功能。
(10
分)
三、以凸轮机构和四连杆机构为基本机构,分别用串联组合、并联组合、封闭式组合方法进行组合,绘制出组合前后的机构运动简图,并简要说明各自组合功能。
(20分)
四、简述技术冲突解决原理的创新设计思路,并举一个工程实例说明之。
(12分)
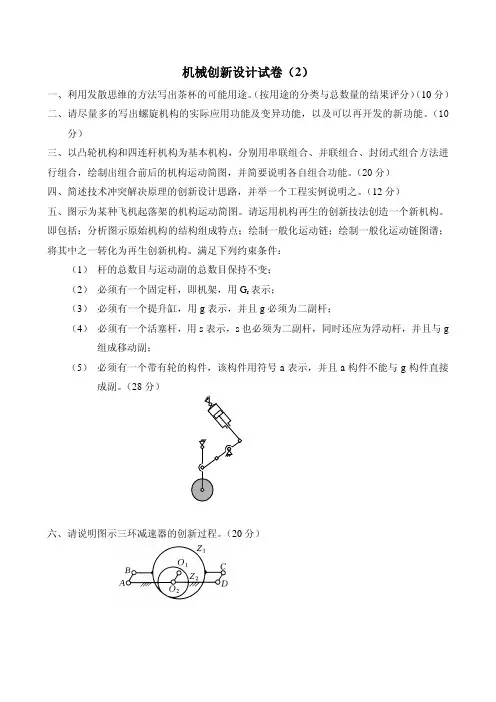
五、图示为某种飞机起落架的机构运动简图。
请运用机构再生的创新技法创造一个新机构。
即包括:分析图示原始机构的结构组成特点;绘制一般化运动链;绘制一般化运动链图谱;将其中之一转化为再生创新机构。
满足下列约束条件:
(1) 杆的总数目与运动副的总数目保持不变;
(2) 必须有一个固定杆,即机架,用G r表示;
(3) 必须有一个提升缸,用g表示,并且g必须为二副杆;
(4) 必须有一个活塞杆,用s表示,s也必须为二副杆,同时还应为浮动杆,并且与g 组成移动副;
(5) 必须有一个带有轮的构件,该构件用符号a表示,并且a构件不能与g构件直接成副。
(28分)
六、请说明图示三环减速器的创新过程。
(20分)。
评分:机械创新设计课题名称:机械创新设计学生姓名:学号:专业:现代制造技术老师:2014年11月19日《机械产品技术创新》考核试题本试卷共四道大题,总分100分。
要求,各大题属于论述题,严禁抄袭。
一、请列举出几种能够满足将回转运动转化为直线运动的机构,并说出在实际产品中的应用。
(15分)(不少于300字)1.曲柄滑块:常用于将曲柄的回转运动变换为滑块的往复直线运动,或将滑块的往复直线运动变换为曲柄的回转运动。
如抽水机是利用活塞的移动来排出空气,造成内外气压差而使水在气压作用下上升抽出,当活塞压下时,进水阀门关闭而排气阀门打开;当活塞提上时,排气阀门关闭,进水阀门打开,在外界大气压的作用下,水从进水管通过进水阀门从上方的出水口流出.这样活塞在圆筒中上下往复运动,不断地把水抽出来。
2.螺旋传动:是由螺杆和旋合螺母组成的机械传动。
如车床横刀架主轴由电动机经主轴箱带动旋转,工件装在主轴卡盘中或支承在顶尖间并随主轴旋转,旋转运动经进给箱、丝杠或光杠传至溜板箱,转变为刀架的进给运动。
3.凸轮机构:是一种结构简单且容易实现各种复杂运动规律的高副机构,广泛运用于自动化及半自动化机械中。
如线从缝纫机顶部的线轴经挑线杆和压线板组件引出。
通过转动压线板组件,缝纫者可以拉紧穿入针的线。
缝纫较薄的织物时,必须拉得紧一些;缝纫较厚的织物时应拉得松一些。
二、调查研究目前汽车行业用于保证汽车行驶平稳性的措施方法,并提出自己的改进方案(15分)(不少于400字)答:现阶段汽车行驶平稳的主要措施是采用减震器,悬挂系统。
其作用是为了使车架与车身的振动迅速衰减,改善汽车行驶的平顺性和舒适性。
1.减震器主要用来抑制弹簧吸震后反弹时的震荡及来自路面的冲击。
在经过不平路面时,虽然吸震弹簧可以过滤路面的震动,但弹簧自身还会有往复运动,而减震器就是用来抑制这种弹簧跳跃的。
减震器太软,车身就会上下跳跃,减震器太硬就会带来太大的阻力,妨碍弹簧正常工作。
机械创新设计试题及答案一、选择题(每题2分,共20分)1. 机械创新设计中,以下哪项不属于创新设计的基本要素?A. 功能创新B. 结构创新C. 材料创新D. 工艺创新答案:D2. 在进行机械创新设计时,以下哪个步骤是不需要的?A. 需求分析B. 方案设计C. 性能测试D. 市场调研答案:C3. 创新设计中,以下哪项技术不属于现代设计方法?A. 计算机辅助设计B. 模块化设计C. 经验设计D. 优化设计答案:C4. 机械创新设计中,以下哪项是设计过程中最核心的环节?A. 创意构思B. 方案评估C. 原型制作D. 市场推广答案:A5. 在机械创新设计中,以下哪种方法不适用于提高设计效率?A. 采用模块化设计B. 使用计算机辅助设计软件C. 重复使用已有设计D. 进行大量手工绘图答案:D6. 创新设计中,以下哪项不属于创新思维的范畴?A. 逆向思维B. 联想思维C. 逻辑思维D. 发散思维答案:C7. 在机械创新设计过程中,以下哪项是评价创新成果的重要指标?A. 创新性B. 可行性C. 经济性D. 所有选项答案:D8. 机械创新设计中,以下哪项不属于设计原则?A. 功能优先原则B. 可靠性原则C. 经济性原则D. 复杂性原则答案:D9. 在机械创新设计中,以下哪种方法不适用于解决设计问题?A. 头脑风暴法B. 思维导图法C. 问题分解法D. 随机尝试法答案:D10. 机械创新设计中,以下哪项不属于设计评价的范畴?A. 性能评价B. 安全性评价C. 环境影响评价D. 市场调查答案:D二、填空题(每题2分,共20分)1. 机械创新设计的核心是_______。
答案:创新思维2. 机械创新设计过程中,_______是实现创新设计的关键。
答案:技术可行性3. 机械创新设计的评价指标包括_______、_______和_______。
答案:创新性、可行性、经济性4. 在机械创新设计中,_______是设计者进行设计思考的起点。
机械创新设计试题第一篇:机械创新设计试题2011-2012学年第一学期机械创新设计试题一、简答题(15分)1、创新能力的概念?特征?培养创新能力应从哪些方面着手?2、思维的定义?特性?类型?3、常用的创造原理、创新技法有哪些?二:思维应用题(15分)1、如果每户都能上互联网,会给社会带来什么变化?至少说出5种。
2、报纸除了阅读以外,还有什么用?至少说出5种。
3、在老人用的拐杖上增加一些功能,使拐杖能够多用(至少5种功能)。
三:技法应用题(30分)1、请提出对皮鞋的种种希望,并提出改进设想(至少五种)。
2、列举家中电脑的5个缺点,并加以改进。
3、请列举手机的五个缺点,并加以改进。
4、使用设问探求法寻找旅行包的新创意,用表格的形式表达。
5、应用形态分析法探求挖掘机、打印机、电脑、计时装置的新创意(任选一种)。
6、利用信息组合法探求小轿车的新创意,用三维信息组合图表示。
四:综合设计题(40分)1、随着经济的发展,现代社会越来越重视能源的节约和利用,请用创新的原理说说如何在家庭中节电?(至少写出5种)2、一家公司,牛奶十分畅销,但是生产的蛋糕和面包销量不是很好,帮他们想想办法。
将蛋糕和面包的宣传材料嵌入牛奶包装里。
3、我们现在经常享受上网的快乐。
可以通过网络传递信息、查找下载资料、玩游戏等等。
可是盲人要和我们一样上网就会遇到很大困难。
针对“盲人上网”这个课题,请你分析主要困难,并提出解决方案。
4、就你熟悉的结构举例说明功能面变异的实例(从功能面的形状、位置、数量、尺寸大小等方面分别举例)?5、机械产品结构的宜人化设计是从哪些方面考虑的?6、简述技术创新对增强企业核心竞争力的作用。
7、现在高速公路经常发生车祸,一般都是恶性的,但是车速又不能降下来。
请你用创新的办法尽量减少高速公路上车祸的发生。
(提示:可以从公路、也可以从汽车、还可以从管理上等各个方面进行大胆的设想。
)8、你学了机械创新设计这门课有哪些收获(要具体谈)?第二篇:机械创新设计学习机械创新设计后的感想与收获机信087 王橙岩 08080803110239机械创新设计技术是一门培养学生创新意识、提高学生综合素质、启发创新思维、注重工程能力培养、介绍机械创新设计方法与机电产品制作实践的课程。
期终考试试卷(2011-2012学年第 二 学期)课程名称 机械创新设计 考试时量 120 分钟题 次第 一 题第 二 题第 三 题 第 四 题 第 五 题 第 六 题 第 七 题 第 八 题 第 九 题 第十 题 合 计 合分人 签 名标准分数 30 1830 22 100实得分数一、单选题(每一小题的备选答案中,只有一个答案是正确的,请把你认为正确答案的题号填入括号内。
错选、多选、不选均不给分,10小题,每小题3分,共30分)。
1、书面集智法中“635法”的含义是( )A 、每人在卡片上默写6个设想,每轮历时3分钟,有5人参加。
B 、有6人参加,每人在卡片上默写3个设想,每轮历时5分钟。
C 、每人在卡片上默写6个设想,有3人参加,每轮历时5分钟。
2、根据反求对象的不同反求设计可以分为( )A 、实物反求和软件反求B 、硬件反求C 、影象反求 3、如图所示的瑞士军刀是采用那种创新组合方法发明的( ) A 、功能组合 B 、形式组合 C 、同类组合 4、思维有那些特性( ) A 、强制性 B 、思维单一性 C 、思维的自觉性和创造性5、创造性思维是一种人类高层次的思维,它有那些特征( ) A 、思维结果的正确性 B 、思维方式的多样灵活性 C 、思维过程的曲折性6、缺点列举法中系统列举缺点的方法为( ) A 、用户反馈法 B 、对比分析法 C 、专家意见法7、功能设计法的正确步骤为( )A 、求总功能——总功能分解——系统原理解——求功能元——求功能元解B 、总功能分解——求总功能——系统原理解——求功能元——求功能元解C 、求总功能——总功能分解——求功能元——求功能元解——系统原理解 8、仿生创新法有那些( )A 、材料仿生、形状仿生B 、外形仿生、信息仿生C 、动作仿生 9、组合创新法有那些 ( )A 、功能组合、材料组合B 、机电组合、机液组合C 、结构组合、原理组合 10、二次设计包括( )A 、开发设计B 、结构设计C 、反求设计二.填空题 (10题. 每题空1分. 共18分)1、从整体上看,机械是由 、 、和 这四个部分组成。
《机械创新设计》试卷
考试时间:90分钟
一、填空题(20分)(1′×20)
1、创新就是创造和创新。
它是集科学性、技术性、社会性、经济性于一身,并贯穿于科技技术实践、生产经营实践和社会活动实践的一种横向性实践活动。
P11
2、创造性思维的形成大致可分为酝酿准备阶段、潜心加工阶段、顿悟阶段三个阶段。
P23
3、平面连杆机构是由若干构件通过低副连接而成的平面机构,它们在各种机械和仪器中获得了广泛的应用。
P23
4、控制系统按照原理可分为开环控制系统和闭环控制系统。
P60
5、TRIZ的含义是发明问题解决理论。
P88
6、每个技术系统的进化都是按照生物进化的模式进行的,一般经历以下几个阶段诞生期、成长期、成熟期、衰退期。
P90
7、从系统论的观点来看,功能是系统的输入和输出间的关系。
从性能的观点来看,功能是物理行为的抽象。
P117
8、机构原理的移植主要有啮合原理的移植、差动原理的移植和谐波转动原理的移植等。
P154
9、并列式机构组合的特点是运动并行传递。
P164
10、仿生机械是模仿生物的形态结构和控制原理,设计、制造出的功能更集中、效率更高并具有生物特征的机械。
P264
二、选择题(15分)(3′×5)
1、如图所示的瑞士军刀采用哪种创新组合方法(B )
A、形式组合
B、功能组合
C、同类组合
2、功能设计法的正确步骤为(C )
A、求总功能——总功能分解——系统原理解——求功能元——求功能元解
B、总功能分解——求总功能——系统原理解——求功能元——求功能元解
C、求总功能——总功能分解——求功能元——求功能元解——系统原理解
3、思维有哪些特性(A )
A、思维的自觉性和创造性
B、思维的强制性
C、思维的单一性
4、组合创新方法有哪些(A )
A、功能组合、材料组合
B、机电组合、机液组合
C、结构组合、原理组合
5、二次设计包括(C )
A、反求设计
B、机构设计
C、开发设计
三、名词解释(20分)(4′×5)
1、定向思维
基本上属于逻辑性思维一类。
其思维过程总是通过寻找合乎逻辑的、成熟的或常规的方法或途径,循序渐进地推断和认识事物。
2、机构组合
机构的组合是指把相同或不同类型的机构通过一定的连接方法,按照一定规则组合而成的一个机构系统,从而实现既定的功能目标。
3、传动系统
将动力机的力和运动传递给执行机构或执行构件的中间装置成为传动系统。
4、技术矛盾
指一个作用同时导致有用及有害两种结果,也可指有作用的引入或有害作用的消除导致一个或几个子系统变坏。
5、逆向工程
是一种以先进产品设备的实物、样件、软件或影像作为研究对象,应用现代设计学的方法学、系统工程学、计算机辅助技术的理论和方法进行系统分析和研究、探索掌握其关键技术,进而开发同类的或更先进的产品技术。
四、简答题(15分)(3′×5)
1、机械创新设计的主要内容有哪些?
答:①机构的创新设计⑴设计出新机构;⑵原有机构演化、变异,导致结构变化②机构应用创新设计③机构组合设计,导致新机构系统的出现④机械机构的
创新设计⑤利用反求原理进行创新设计⑥利用仿生原
理进行创新设计
2、简述产品进化S曲线并画出S曲线。
答:S曲线描述了一个技术系统的完整生命周期,其横坐
标代表时间,纵轴代表技术系统的某个重要的性能参数
(39个工程参数)。
S曲线描述的是一个技术系统中诸项
性能参数的发展变化规律。
3、TRIZ一般解题模式及流程是怎样的?
答:首先要对一个实际问题进行仔细的分析并加以定义;然后根据TRIZ提供的方法,将所需解决的实际问题归纳为一个类似的TRIZ标准问题模型;接着,针
对不同的标准解决方案模型;最后,将这些类似的解决方案模型,应用到具体的问题之中,演绎得到最终的解决方法。
五、分析设计题(30分)(2′×15)
1、列举一种能实现增大行程的凸轮机构,画出机构简图,并进行简要说明。
答:机构简图如右所示,为了使凸轮能够沿从动推杆的位
移方向移动,将其设计成中间带有滑道,并将转动滑块设
在其中,这样,当凸轮转动时就可以实现凸轮相对于固定
滚子3的位移,而从动杆2相对于凸轮又有位移,两项位
移之和就是从动杆的最终行程。
达到了增大行程的效果。
2、对图示缝纫机针杆传动机构进行分析;
答:工作构件是针杆3,是曲柄滑块机构
1-2-3的输出构件,曲柄1的旋转可以实
现针杆上下运动。
由于工作过程中需要改
变针杆3的摆角,两种方案分别在曲柄滑
块机构上并联了偏心盘凸轮机构4-5和
摆动导杆机构4-5-6。
两种方案的组合机
构都具有两个自由度,(a)图所示方案的原动件分别是曲柄1和凸轮4,通过调整偏心凸轮的偏心距,可以改变针杆3的摆角;(b)图所示方案的原动件分别为曲柄1和曲柄6,曲柄6通过摆动导杆机构可以调整针杆3的摆角。
设计该类机构时,一般需要按照输出机构的复合运动要求绘制运动循环图,根据运动循环
图确定两主动构件的初始位置,并且要求协调两个主动构件的运动,以实现针杆3上下往复移动和摆动的复杂平面运动规律。
Welcome To Download !!!
欢迎您的下载,资料仅供参考!。