雷达原理讲义
- 格式:pdf
- 大小:2.84 MB
- 文档页数:52

雷达原理课件雷达原理课件雷达(Radar)是一种利用电磁波进行探测和测量的技术。
它广泛应用于军事、航空、气象等领域,为我们提供了无可替代的信息和数据。
本文将介绍雷达的原理和应用,并探讨其在现代社会中的重要性。
一、雷达的基本原理雷达的基本原理是利用电磁波的特性来实现目标的探测和测量。
它通过发射一束电磁波,然后接收并分析回波来确定目标的位置、距离、速度等信息。
1. 发射电磁波雷达系统首先发射一束电磁波,通常是微波或无线电波。
这些电磁波会沿着直线传播,并在碰到目标时发生反射或散射。
2. 接收回波当发射的电磁波碰到目标时,它们会发生反射或散射,并返回雷达系统。
雷达接收器会接收到这些回波,并将其转化为电信号。
3. 分析回波接收到的电信号经过处理和分析,可以提取出目标的相关信息。
通过测量回波的时间延迟、频率变化和幅度变化等,雷达系统可以确定目标的位置、距离、速度等参数。
二、雷达的应用领域雷达技术在各个领域都有着广泛的应用,以下是几个常见的领域:1. 军事应用雷达在军事领域中起着至关重要的作用。
它可以用于目标探测、目标跟踪、导航、武器制导等方面。
雷达系统可以帮助军队实时监测敌方的动态,提供战场情报,为作战决策提供重要支持。
2. 航空导航雷达在航空领域中被广泛应用于飞行导航和空中交通管制。
它可以帮助飞行员确定飞机的位置和高度,避免与其他飞行器相撞。
雷达系统还可以监测天气变化,提供飞行安全的重要信息。
3. 气象预报雷达技术在气象领域中扮演着重要角色。
通过测量回波的强度和频率,雷达系统可以提供降水量、风速、云层高度等天气信息。
这对于气象预报和灾害预警非常关键。
4. 海洋勘测雷达在海洋领域中也有着广泛的应用。
它可以用于测量海洋表面的波浪、潮汐和海流等信息。
这对于海洋勘测、海上交通和海洋资源开发具有重要意义。
三、雷达在现代社会中的重要性雷达技术的发展和应用对于现代社会来说具有重要意义。
以下是几个方面的重要性:1. 安全保障雷达系统可以帮助保障国家的安全。


雷达系统原理详解雷达技术是一种利用电磁波进行探测的高科技技术。
雷达系统通过发射并接收回波信号,可以探测目标的位置、速度和形状等信息。
本文将详细介绍雷达系统的原理。
一、雷达系统的基本原理雷达系统的基本原理可以简单概括为发射、接收及信号处理三个部分。
1. 发射:雷达系统通过发射天线向目标方向发射一束电磁波,一般使用的是射频电磁波。
发射的电磁波经过连续波、脉冲或者调频等方式进行调制,以便更好地与目标进行交互。
2. 接收:雷达系统的接收部分主要由接收天线和接收器组成。
接收天线接收到目标返回的电磁波信号,并将其转变为电信号送入接收器。
接收器负责放大、滤波、解调和信号恢复等处理,以提取有用的目标信息。
3. 信号处理:接收到的信号经过放大和滤波等处理后,进入雷达信号处理系统。
信号处理系统对信号进行分析、解调、去噪等处理,以提取出目标的位置、速度以及其他特征参数。
常见的信号处理方法包括脉冲压缩、多普勒处理等。
二、雷达系统涉及的原理知识1. 电磁波传播原理:雷达系统利用电磁波进行探测和定位,因此对电磁波的传播规律有所了解是必要的。
电磁波在空间中传播的速度约为光速,可以通过速度与时间的关系计算目标的距离。
2. 脉冲压缩原理:当雷达系统发送窄脉冲时,可以获得更高的分辨率和更好的测量精度。
脉冲压缩就是通过对接收到的回波信号进行特殊处理,使得其时域和频域的展宽减少,从而实现更好的测量效果。
3. 多普勒效应原理:当雷达系统和目标相对运动时,回波信号的频率会发生变化,即多普勒效应。
利用多普勒效应可以获取目标的速度信息。
雷达系统通过测量频率差异来计算目标的相对速度。
三、雷达系统的应用领域雷达系统在军事、航空航天、气象、海洋、交通和地质勘探等领域都有广泛的应用。
在军事领域,雷达系统可以用于目标探测、识别和跟踪,为军事作战提供重要的情报支持。
在航空航天领域,雷达系统被广泛应用于飞机的导航、导弹的制导以及航空交通管制等方面。
在气象学中,雷达系统可用于天气预测和预警,监测降水情况以及探测龙卷风等极端天气现象。

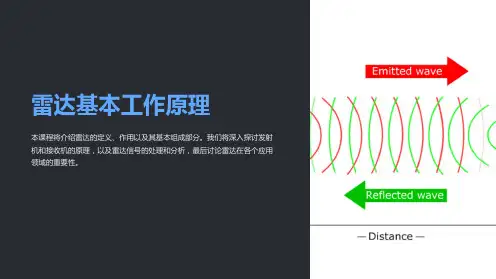
雷达基本理论与基本原理一、雷达的基本理论 1、雷达工作的基本过程发射机产生电磁信号,由天线辐射到空中,发射的信号一部分被目标拦截并向许多方向再辐射。
向后再辐射回到雷达的信号被天线采集,并送到接受机,在接收机中,该信号被处理以检测目标的存在并确定其位置,最后在雷达终端上将处理结果显示出来。
2、雷达工作的基本原理一般来说,会通过雷达信号到目标并从目标返回雷达的时间,得到目标的距离。
目标的角度位置可以根据收到的回波信号幅度为最大时,窄波束宽度雷达天线所指的方向而获得。
如果目标是运动的,由于多普勒效应,回波信号的频率会漂移。
该频率的漂移与目标相对于雷达的速度成正比,根据2rd v f λ=,即可得到目标的速度。
3、雷达的主要性能参数和技术参数 3.1 雷达的主要性能参数 3.1.1 雷达的探测范围雷达对目标进行连续观测的空域,叫做探测范围,又称威力范围,取决于雷达的最小可测距离和最大作用距离,仰角和方位角的探测范围。
3.1.2 测量目标参数的精确度和误差精确度高低用测量误差的大小来衡量,误差越小,精确度越高,雷达测量精确度的误差通常可以分为系统误差、随机误差和疏失误差。
3.1.3 分辨力指雷达对两个相邻目标的分辨能力。
可分为距离分辨力、角分辨力(方位分辨力和俯仰角分辨力)和速度分辨力。
距离分辨力的定义:第一个目标回波脉冲的后沿与第二个目标回波脉冲的前沿相接近以致不能分辨出是两个目标时,作为可分辨的极限,这个极限距离就是距离分辨力:min ()2c R τ∆=。
因此,脉宽越小,距离分辨力越好3.1.4数据率雷达对整个威力范围完成一次探测所需时间的倒数。
3.1.5 抗干扰能力指雷达在自然干扰和人为干扰(主要的是敌方干扰(有源和无源))条件下工作的能力。
3.1.6 雷达可靠性分为硬件的可靠性(一般用平均无故障时间和平均修复时间衡量)、软件可靠性和战争条件下雷达的生存能力。
3.1.7 体积和重量体积和重量决定于雷达的任务要求、所用的器件和材料。