【课件】水下机器人ROVppt
- 格式:ppt
- 大小:294.77 KB
- 文档页数:27

水下机器人水下机器人- 简介ROV,即水下机器人(Remote Operated Vehicle ),有时为了区别于地面和空中的ROV(Remote Control Vehicles),又将海洋中所用的ROV称为Remotely Operated Underwater Vehicle。
系统组成包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。
功能多种多样,不同类型的ROV用于执行不同的任务,被广泛应用于军队、海岸警卫、海事、海关、核电、水电、海洋石油、渔业、海上救助、管线探测和海洋科学研究等各个领域。
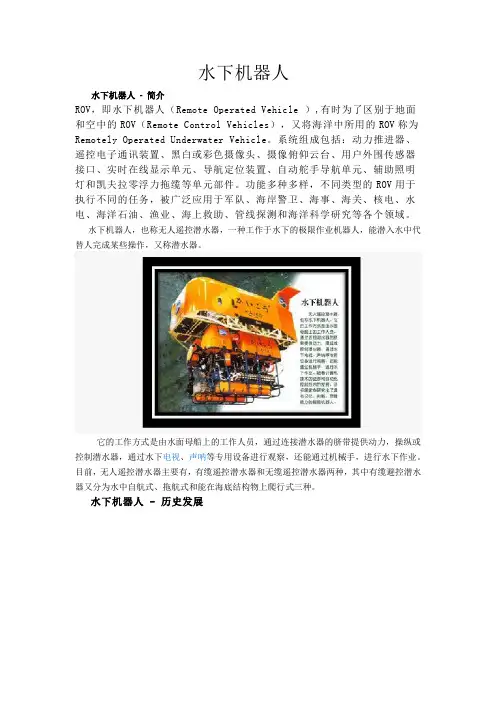
水下机器人,也称无人遥控潜水器,一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。
它的工作方式是由水面母船上的工作人员,通过连接潜水器的脐带提供动力,操纵或控制潜水器,通过水下电视、声呐等专用设备进行观察,还能通过机械手,进行水下作业。
目前,无人遥控潜水器主要有,有缆遥控潜水器和无缆遥控潜水器两种,其中有缆避控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
水下机器人 - 历史发展水下机器人1934年,美国研制出下潜934米的载人潜水器;1953年又研制出无人有缆遥控潜水器;其后的发展大致经历了三个阶段;第一阶段从1953年至1974年为第一阶段,主要进行潜水器的研制和早期的开发工作,先后研制出20多艘潜水器,其中美国的CURV系统在西班牙海成功地回收一枚氢弹,引起世界各国的重视。
第二阶段1975至1985年是遥控潜水器大发展时期,海洋石油和天然气开发的需要,推动了潜水器理论和应用的研究,潜水器的数量和种类都有显著地增长,载人潜水器和无人遥控潜水器(包括有缆遥控潜水器、水底爬行潜水器、拖航潜水器、无缆潜水器)在海洋调查、海洋石油开发、救捞等方面发挥了较大的作用。
水下生产系统的水下机器人ROV接口
水下生产系统的水下机器人ROV接口一旦选择好接口,在建造期间把接口装配到水下设备上时,宜进行简单的检验或出厂验收试验(FAT)。
试验记录除了能证实现场设备是合适的以外,还能为监测设备安装后以及整个工作寿命内的性能提供基础资料。
同时,记录的某些方面是关注维修本身的,其他的一些方面(比如操作时间)可为以后操作时,对不同类型的接口和工具选择(比如机械手或ROV工具或潜水员)进行比较。

⽔下机器⼈发展现状ROV多功能⽔下脐带缆夹检测车综述1⽔下机器⼈是⼀种可以在⽔下运⾏并能够独⽴完成特定功能的机械设备,通常可以分为载⼈⽔下机器⼈(Human Occupied Vehicle ,简称HOV ),遥控机器⼈(Remotely Operated Vehicle ,简称ROV )和⾃治⽆⼈⽔下机器⼈(Autonomous Underwater Vehicle ,简称AUV )三类。
AUV 在⽔下通过各类传感器测量信号,经过机载CPU 进⾏处理决策,独⽴完成各种操作,例如进⾏⽔下机动航⾏,动⼒定位,信息采集,⽔下探测等。
通常这种机器⼈依靠⽔声通讯技术与岸基和船基进⾏联络,或者浮出⽔⾯,撑起⽆线电天线,与陆基和卫星进⾏通讯。
AUV 的能源完全依靠⾃⾝提供,往往⾃⾝携带可充电电池、燃料电池、闭式柴油机等。
该类设备优点是活动范围可以不受空间限制,并且没有脐带缆,不会发⽣脐带缆与⽔下结构物缠绕问题,但是⽔下的续航能⼒和负载能⼒受到⾃⾝能源的强烈制约,只能完成⼀些短程和轻载的⼯作,⽽⾃⾝的CPU 处理能⼒⼜很⼤程度上限制了AUV 所能从事⼯作的复杂程度。
典型的AUV 有美国海军研究⽣院的Phoenix AUV和性能更优越的Aries AUV,这两个机器⼈的研发主要是为了研究智能控制、规划和导航功能。
⿇省理⼯⼤学Odyssey II是⼀种主要⽤于海冰检测和标图的机器⼈。
美国新罕布什尔⾃主⽔下系统研究所与俄罗斯远东科学院⽔下技术研究所联合开发的太阳能⾃主⽔下AUV 正在尝试克服AUV 的远程续航缺陷。
美国的C.S.Droper 实验室则在仿⽣AUV ⽅⾯有巨⼤的突破,代表产品是仿黄鳍⾦枪鱼机器⼈VCUUV 。
加拿⼤在1994年冰层电缆铺设⽅⾯率先采⽤AUV 技术,研制出Theseus AUV,该机器⼈配备了⼀块70kWh 铝氧燃料电池,续航能⼒达到36⼩时。
后来该机器⼈的能源装置不断升级,到1997年完成第⼆代电池试验,续航能⼒较第⼀代显著提⾼。