果园定向仿形弥雾机的设计
- 格式:pdf
- 大小:376.73 KB
- 文档页数:4

果园仿形喷雾机的电控系统设计与试验一、引言:果园仿形喷雾机,是一种用于果园中进行喷雾作业的机械设备。
喷雾机的主要作用是在果树上喷洒农药或杀虫剂,以达到控制害虫、病害的目的,保障果树的生长和产量。
为了提高果园喷雾的效率和质量,采用电控系统对仿形喷雾机进行升级改造,实现自动化控制。
二、设计要求:1. 自动化控制:实现系统集成,并对喷雾机进行电气自动控制,以减少人工作业,提高喷雾效率和精度。
2. 稳定性:系统要求稳定可靠,防止喷雾中途出现故障和异常。
3. 经济性:控制系统要经济、简单、易于维护和维修。
三、系统设计:1. 控制模式选择:本设计采用单片机控制模式,电控系统应该包括单片机控制芯片、电源、输入输出接口、传感器和执行器等组件。
2. 传感器选择:仿形喷雾机的喷雾量、速度等参数需要传感器对其进行测量。
对于这些参数的测量,可以采用压力传感器、流量传感器等,满足不同要求。
3. 控制程序编写:编写控制程序,根据传感器所读取的数据进行控制,完成喷雾机自动化控制。
根据控制要求设计控制程序的结构和算法。
4. 电路设计:设计和搭建喷雾机电控板电路,包括单片机的电源和I/O接口电路,传感器信号处理电路,执行器驱动电路等。
5. 自动化控制测试:进行系统测试,检验控制系统的稳定性和所设计的功能是否得以实现。
四、系统试验:1. 开关机试验:通过开关机按钮进行测试,检查单片机是否能够准确地完成操作。
2. 调节喷雾量试验:调节单片机程序中的输出电压,控制喷雾量增大或减小的情况下,检查喷雾机马达在不同输出电压下的喷雾量变化,以评估控制系统是否能够准确地完成调节喷雾量的功能。
3. 调节喷雾速度试验:调节单片机程序中的输出电压,检查喷雾机马达在不同输出电压下的喷雾速度变化,以评估控制系统是否能够准确地完成控制喷雾速度的功能。
4. 稳定性试验:运行控制系统连续数小时,检查系统是否能够长时间稳定运行。
五、总结:本系统的设计主要是针对现有果园仿形喷雾机的自动化控制问题进行改进,实现了更为准确、高效和自动化的喷雾控制功能。

果园农药雾化喷雾系统的设计与优化一、引言随着农业生产的不断发展,果树种植已经成为了我国农业的重要组成部分,同时果园的管理也变得越来越重要。
在果园管理中,农药的使用是不能避免的一环节,因此如何精准、安全、高效地使用农药,已经成为现代农业技术的一个重要研究方向。
传统的农药喷洒方式,由于操作人员技能水平和机械精度的限制,很难做到精准、安全、高效的使用农药。
因此,研究如何设计和优化果园农药雾化喷雾系统,已经成为目前农业机械化技术的重要课题之一。
二、果园农药雾化喷雾系统的组成果园农药雾化喷雾系统主要由以下几部分组成:1、供液系统:主要由储液罐、泵、过滤器、管路等组成,用于将农药液体输送到雾化器中。
2、雾化器:可以将液体农药均匀地雾化成细小颗粒,在雾化的同时,加入适量的空气,形成细小颗粒状的农药雾,以便能够均匀地分布在整个果树与果实表面。
3、悬挂系统:主要用于将雾化器安装在适当的高度和位置,以便能够覆盖到整个果树。
4、控制系统:主要由电子控制装置和传感器等组成,用于控制喷雾量、作业速度等参数,以确保农药的使用量和喷洒质量。
三、果园农药雾化喷雾系统的设计1、供液系统的设计供液系统应当选用耐腐蚀、抗磨损、优良封闭性能的材料,并在材料的选择上注意防止化学反应和防腐、耐压等性能,以确保高效稳定的输液性能。
在选择泵时要考虑到流量、压力和耐腐蚀等因素,以便将液体农药输送到雾化器中。
2、雾化器的设计雾化器的设计直接关系到农药的雾化效果,因此需要选用先进的喷头技术和雾化原理,并且在设计时应当注意到颗粒大小、成分稳定性和雾化效率等因素。
一般来说,雾化器应当具有快速均质、调节性好、雾化量可调、自清洗等特点,以便能够适应不同的作业要求。
3、悬挂系统的设计悬挂系统的设计要考虑到果树的形态和高度等因素,并且需要能够方便地进行调整和安装。
一般来说,悬挂系统应当采用强度高、抗腐蚀、无毒、弹性好的材料,并且需要考虑到作业安全、机械稳定性和使用寿命等因素,以确保系统能够长期稳定地运行。
仿形喷雾装置的设计及分析张建瓴,陈树军,可欣荣,洪添胜(华南农业大学工程学院,广州510642)摘要 从实现仿形运动的角度出发,设计一种果树仿形喷雾装置。
该系统主要由仿形机构、喷雾部分和单片机检测及控制部分组成。
主要介绍仿形喷雾装置的机械结构部分的设计,并分析仿形机构,特别是喷头的运动及运动空间。
最后给出喷头位置控制的仿真算例。
关键词:仿形 喷雾 机构中图分类号:TH16 文献标识码:A 文章编号:1671 3133(2006)01 0120 03果树仿形喷雾技术就是通过检测果树的实际形状,自动控制喷头(组)在理想的喷雾距离下进行作业的一种方法[1-6]。
本文将工业机械臂的结构形式引入到果树喷雾中,从实现仿形运动的角度,设计出一种果树仿形喷雾系统。
该系统通过单片机控制各关节的步进电动机,使机构能够根据果树外形产生仿形运动,并按照靶标的形状调节喷头的位置,当喷头运动到合适的位置时,启动喷雾阀门对果树进行喷药,实现与靶标相仿形状下的精确喷雾。
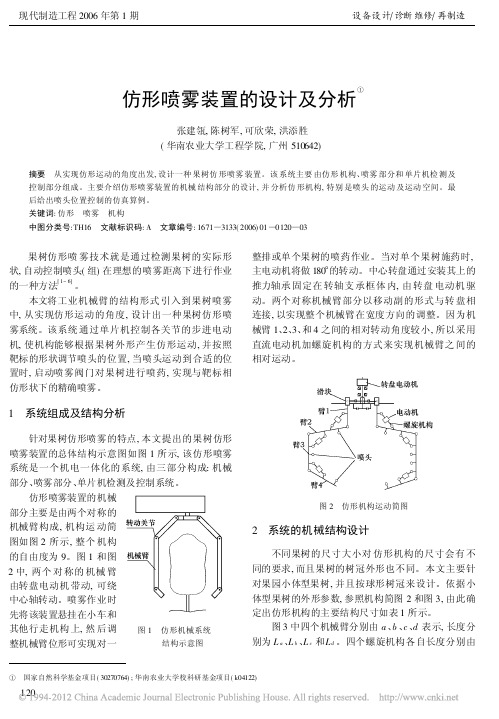
1 系统组成及结构分析针对果树仿形喷雾的特点,本文提出的果树仿形喷雾装置的总体结构示意图如图1所示,该仿形喷雾系统是一个机电一体化的系统,由三部分构成:机械部分、喷雾部分、单片机检测及控制系统。
图1 仿形机械系统 结构示意图仿形喷雾装置的机械部分主要是由两个对称的机械臂构成,机构运动简图如图2所示,整个机构的自由度为9。
图1和图2中,两个对称的机械臂由转盘电动机带动,可绕中心轴转动。
喷雾作业时先将该装置悬挂在小车和其他行走机构上,然后调整机械臂位形可实现对一整排或单个果树的喷药作业。
当对单个果树施药时,主电动机将做180 的转动。
中心转盘通过安装其上的推力轴承固定在转轴支承框体内,由转盘电动机驱动。
两个对称机械臂部分以移动副的形式与转盘相连接,以实现整个机械臂在宽度方向的调整。
因为机械臂1、2、3、和4之间的相对转动角度较小,所以采用直流电动机加螺旋机构的方式来实现机械臂之间的相对运动。

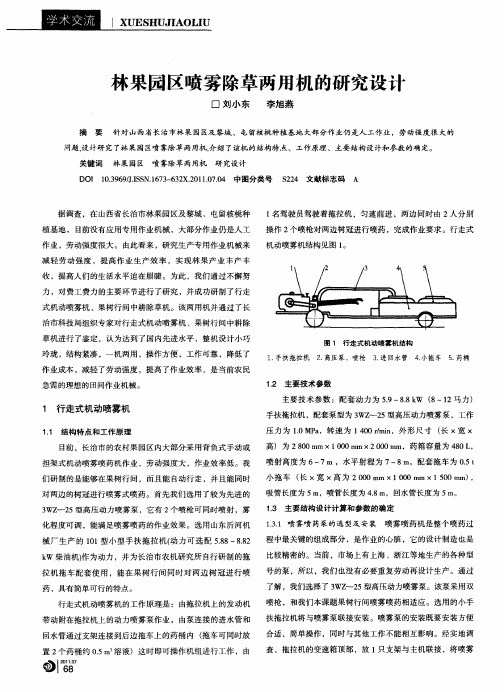
果园风送式喷雾机设计刘洪杰;冯晓静;刘俊峰;李建平【摘要】[Objective]Study on designing a new orchard sprayer in order to solve the backward application techniques for apple production process. [ Method ] A new model orchard sprayer was developed by designing the major components and studied by experiment. [ Result ] The results-showed that the sprayer had high efficiency, stable spray volume, uniform liquid atomizing and good penetration and could meet the requirements of new patterns planting orchard spraying pesticide. [ Conclusion ] Orchard air-blast sprayer easy to use, water-saving medicine section and had brooad application prospects.%[目的]针对我国苹果生产过程中施药技术落后等的题,研究设计出一种新型果园喷雾机.[方法]通过对主要部件设计研制出了适应新型果园种植模式果园喷雾机,并进行试验验证.[结果]验证结果表明新型果园喷雾机工作效率高、喷量稳定、雾化均匀、穿透性好,能够满足新型种植模式果园施药要求.[结论]风送式果园喷雾机使用方便、节药节水,具有广阔应用前景.【期刊名称】《安徽农业科学》【年(卷),期】2011(039)033【总页数】3页(P20911-20913)【关键词】果园;风送式;喷雾机【作者】刘洪杰;冯晓静;刘俊峰;李建平【作者单位】河北农业大学机电工程学院,河北保定071000;河北农业大学机电工程学院,河北保定071000;河北农业大学机电工程学院,河北保定071000;河北农业大学机电工程学院,河北保定071000【正文语种】中文【中图分类】S232.3果园中喷药作业是最费工时和最重要的作业项目。
仿形园林喷雾机结构设计发布时间:2021-11-04T07:52:10.957Z 来源:《工程管理前沿》2021年 18期作者:闫晓海孙令东王秀平岳建辉[导读] 本文主要根据植株形状而设计的仿形园林喷雾机,该机械结构能够实现针对植株外形进行仿形喷雾,闫晓海孙令东王秀平岳建辉潍坊理工学院山东 262500摘要:本文主要根据植株形状而设计的仿形园林喷雾机,该机械结构能够实现针对植株外形进行仿形喷雾,能从各个角度、由植株内部到外部实现全方位、多层次精准喷雾,并可实现残余药液的回收再利用,减轻药液对土壤所造成的土地板节、土地肥力下降等问题,避免了经济上的浪费,减轻对生态环境的污染,同时保护了喷药人的健康。
关键词:仿形、立体环流喷雾、药液回收 Abstract:?This?paper?is?mainly?based?on?the?shape?of?the?plant?and?the?design?of?the?profiling?garden?sprayer,?the?mechanical?structure? can?be?achieved?for?the?shape?of?the?plant?profiling?spray,?from?all?angles,?from?the?inside?of?the?plant?to?the?outside?to?achieve?all-round,? multi-level?accurate?spray,?and?can?realize?the?recovery?and?reuse?of?residual?liquid?medicine,?reduce?the?liquid?medicine?caused?by?the?soil,? land?fertility?decline?and?other?issues,?avoid?economic?waste,?reduce?the?pollution?of?the?ecological?environment,?while?protecting?the?health? of?the?sprayer. Keywords:?profiling,?three-dimensional?circulation?spray,?liquid?medicine?recovery.1.研究背景及意义目前传统喷雾机主要是采用喷头自上而下喷雾,由于园林枝叶比较繁茂,下层或内部枝叶喷洒不到,喷洒防治效果较差,如果要保证增强防治效果,往往加大喷洒药液量,虽然这样可暂时起到防治效果,但不利于长久发展,会造成土壤板结、土壤肥力下降,对生态环境造成巨大危害,过量药液喷洒会造成经济上的浪费[1]。
果园风送喷雾机的设计与性能试验邢敬轩,刘俊峰,张琳,冯晓静(河北农业大学机电工程学院,河北保定071000)摘要:目前,果园生产过程中存在着施药技术落后、施药用水量大、药液利用率低和机具田间适应性差等问题,急需设计一种喷雾机,保证果园植保的高效和低残留,促进中国果业的发展,提升果品品质,加强果品在国际市场上的竞争力。
为此,应用I nvent or的实体建模功能进行了喷雾机各个结构的三维建模设计。
对整机质心位置进行计算以达最佳的牵引配置.优化了核心部件和重要机构的结构形式和参数;设计了一种农村小动力拖拉机牵引的风送果园喷雾机,并对喷雾机喷雾喷量、药液分布等喷雾特性进行了试验研究,旨在对药液分布对风送式喷雾机的设计提供参考。
关键词:果园;喷雾机;质心;I nvent or;喷雾特性中图分类号:s493+.1文献标识码:A文章编号:1003—188X(2012)07-01晒—040引言随着经济发展,人民生活越来越富裕,对水果品质要求和需求量随之提高。
由于在选择果树品种、培育果树、种植方法和药剂使用技术等因素的限制,果园内的病虫害得不到有效地控制,已经成为果品生产的严重的威胁。
我国传统果园居多,使得现代化果园植保机械不能发挥其先进的作用。
这些因素直接影响水果品质,限制了水果产量的进一步提高。
果树在一年中的生长期内要喷施农药8~15次。
目前,国内大多数仍使用手动踏板式喷雾器和高压喷枪,采用大容量淋洗式连续施药方法。
这种粗放落后的药械和施药方法农药利用率以及作业效率极低,滞留在作物、果树枝叶上的农药仅有15%一20%,80%一85%的农药流失至周围环境之中,在造成农药的严重浪费和对环境污染的同时,还造成了农产品的农药残留…。
针对此问题,笔者对果园风送式喷雾机的喷雾环节进行了技术研究,在满足果树喷药的基础上,设计开发了果园风送式喷雾机,并且对其喷雾特性进行了试验研究。
1总体结构及主要技术参数收稿日期:2011—08一14基金项目:国家现代苹果产业技术体系果园机械岗专项(nye yt x一08)作者简介:邢敬轩(1985一)男。
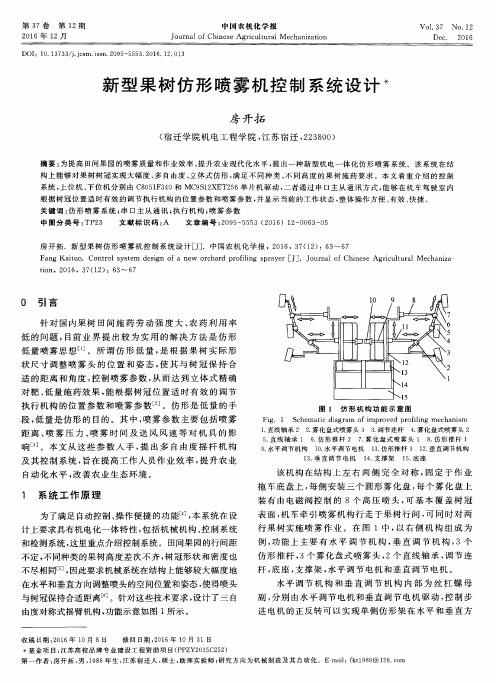
第43卷第3期Vol.43No.32022年3月Mar.2022中国农机化学报Journal of Chinese Agricultural MechanizationDOI:10.13733/j.jcam.issn.2095⁃5553.2022.03.009果园仿形风送喷雾机构设计与试验*房开拓1,周良富2,尤丽华3(1.宿迁学院机电工程学院,江苏宿迁,223800;2.南京工业职业技术大学工程技术实训中心,南京市,210039;3.江南大学机械工程学院,江苏无锡,214122)摘要:为执行农药精准喷施,提高农药有效利用率,提出一种多自由度对称式二级摇臂机构,根据果树仿形风送式喷雾技术原理,设计一种作业姿态和喷雾距离实时可调的仿形喷雾机构。
通过数学建模与软件优化,推导出喷雾点运动学方程,得到喷雾机单侧最大作业高度和宽度分别为2951.5mm 、1704.5mm ,横向和纵向可调节最大值分别为695.4mm 、680.4mm ,实现喷雾距离精准可调;机构运行过程中各铰接点处最大受力仅为338.94N ,保证工作平稳可靠。
机构的响应特性结果显示,柔性仿形机构运行稳定,水平伸缩全程时间为12.5s ,升降全程时间为36.2s ,单一推杆全程伸出平均时间为19.2s 。
喷雾沉积特性试验结果表明仿形喷雾雾滴覆盖率平均值达43.85%,变异系数平均值26.63%,优于固定喷雾整体雾滴覆盖率平均值29.97%,变异系数平均值39.05%。
该研究为仿形喷雾机具的设计与应用提供技术支撑。
关键词:果树;喷雾机;仿形喷雾;沉积特性;雾滴;覆盖率中图分类号:S491文献标识码:A文章编号:2095⁃5553(2022)03⁃0068⁃08房开拓,周良富,尤丽华.果园仿形风送喷雾机构设计与试验[J].中国农机化学报,2022,43(3):68-74,83Fang Kaituo,Zhou Liangfu,You Lihua.Design and evaluation of orchard profiling pneumatic sprayer [J].Journal of Chinese Agricultural Mechanization,2022,43(3):68-74,830引言风送喷雾是当前果园施药最常用的施药技术。
3MD-8型低量弥雾植保机的设计与试验孙冬霞ꎬ李明军ꎬ曹龙龙ꎬ李㊀伟ꎬ王㊀成ꎬ张爱民(滨州市农业机械化科学研究所ꎬ山东滨州㊀256600)摘㊀要:为解决现有植保机械施药量大㊁药液利用率低等问题ꎬ设计了3MD-8型低量弥雾植保机ꎮ该机型采用风力雾化风力传送的弥雾原理ꎬ将药液撕裂成70~150μm的雾滴ꎬ主要用于棉花㊁大豆等中高秆作物的植保化控作业ꎮ其主要部件包括风机㊁输风管㊁药液箱㊁喷头及机架等ꎬ结构简单ꎬ造价低廉ꎻ通过与拖拉机液压升降机构韧性连接实现输风管折叠ꎬ操作方便ꎮ室内和田间试验结果表明:机具各项性能良好ꎬ工作可靠ꎬ同常规喷雾机相比ꎬ可节约药液50%~70%ꎬ杀虫效果显著ꎬ达95%以上ꎮ关键词:植保机械ꎻ风力雾化ꎻ弥雾ꎻ低量中图分类号:S491㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)08-0080-080㊀引言长久以来ꎬ病虫害一直是影响作物生产的重要因素ꎮ由于作物不同生长时期病虫害的种类不同ꎬ各种病虫害会对作物生产造成极大的影响[1]ꎮ目前ꎬ控制各种病虫害的主要手段是以喷施农药为主的化学调控[2]ꎮ随着农业产业化㊁规模化㊁集约化发展ꎬ化学调控成为作物管理的重要环节[3]ꎮ在推进农业机械化进程中ꎬ植保化控机械化是其重要组成部分ꎮ近年来ꎬ精准施药技术有所发展ꎻ但从总体上来说ꎬ我国植保机械与发达国家相比仍存在着用水用药多㊁残留量大㊁有效利用率不高等缺点[4]ꎮ为此ꎬ设计了高效㊁低耗㊁结构简易的弥雾机械 3MD-8型低量弥雾植保机ꎮ1㊀总体结构与工作原理1.1㊀总体结构与技术参数3MD-8型低量弥雾植保机主要由药液箱㊁药液箱固定圈㊁药液箱支架㊁风机㊁机架㊁韧性连接装置㊁输风管㊁喷管㊁支架㊁皮带轮㊁提升臂加长杆及胶管等部件组成ꎬ如图1所示ꎮ1.2㊀工作原理该机型是与雷沃M254-E型拖拉机配套的低量弥雾植保机械ꎬ主要用于棉花㊁大豆等中高秆作物的收稿日期:2018-03-21基金项目:山东省农机装备研发创新计划项目(2017YF059)作者简介:孙冬霞(1981-)ꎬ女ꎬ山东寿光人ꎬ副研究员ꎬ硕士ꎬ(E-mail)bznjsdx@163.comꎮ通讯作者:张爱民(1976-)ꎬ男ꎬ山东惠民人ꎬ副研究员ꎬ(E-mail)bzzam@163.comꎮ病虫害防治㊁化学调控㊁喷洒除草剂等作业ꎮ该机设计幅宽为8行ꎬ安装拖拉机高架后可在1.2m株高的棉花地内顺利通过并进行作业ꎮ该机采用风力雾化风力传送的弥雾原理ꎬ作业时药液在重力作用下从药液箱流入固定叶轮喷头ꎬ药液在风机产生的高速气流的撞击作用下被撕裂成70~150μm的雾滴ꎬ同时被气流吹送至作物行间附着于作物叶面ꎻ作物枝叶在风力作用下翻动ꎬ雾滴均匀覆盖于作物正反叶面上ꎮ1.药液箱㊀2.药液箱固定圈㊀3.药液箱前支架㊀4.药液箱后支架5.风机㊀机架㊀7.韧性连接装置㊀8.输风管9.喷管㊀10.支架㊀11.皮带轮㊀12.提升臂加长杆㊀13.胶管图1㊀低量弥雾植保机结构图Fig.1㊀Structurediagramoflowvolumesprayer该机型的技术参数如表1所示ꎮ表1㊀低量弥雾植保机的技术参数Table1㊀Technicalparametersoflowvolumesprayer名称单位技术参数外形尺寸(长ˑ宽ˑ高)mm4200ˑ5600ˑ1750(作业状态)4200ˑ2150ˑ1550(运输状态)续表1名称单位技术参数质量kg450(净值)950(工作质量)工作速度km/h3.4~5.4药滴直径μmɤ150药液箱容积L500喷量L/min12加满药液箱时间min41工作效率(理论)667m2/h24~51风机额定转速r/min2900风压Pa6954风量m3/h3996功率kW11.2喷头型号固定转盘式2㊀总体方案的确定2.1㊀雾化动力的确定现有植保机械的雾化动力主要有液泵和风机两种ꎬ即利用柴油机㊁汽油机㊁蓄电装置或者拖拉机动力输出轴驱动液泵或风机使药液雾化[5]ꎮ液泵雾化是利用高压力把药液从喷孔中压出以形成雾滴ꎬ风机雾化是利用风机的高速气流把药液撕裂成70~150μm的雾滴ꎮ要实现低量弥雾的目的ꎬ如果使用液泵雾化ꎬ需要的压力较大ꎬ会给管道的密封带来困难ꎬ且成本较高ꎬ因此不宜采用液泵雾化ꎮ与液泵雾化相比ꎬ风力雾化具有结构简单㊁操作容易㊁故障少及机具成本低等优点ꎬ因此3MD-8型低量弥雾植保机的雾化动力采用风力雾化ꎮ风机是弥雾植保机的主要部件ꎬ工作时产生高速气流把药液流撕裂成70~150μm的极细雾滴ꎬ并吹送到作物上ꎮ与国内外同类风机相比ꎬ9-19型高压离心风机具有效率高㊁噪声低㊁性能曲线平稳㊁高效区宽等优点ꎮ根据9-19型高压离心风机的性能参数与结构特点ꎬ项目组选用9-19No5.6A型高压离心风机ꎮ该型号风机的性能参数如表2所示ꎮ表2㊀9-19No5.6A型高压离心风机的性能参数Table2㊀Performanceparametersof9-19No5.6Ahighpressure㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀centrifugalfan转速/r min-1工况点全压/Pa流量/m3 h-1所需功率/kW29001718222627.02727327148.13723631679.147109361910.256954399611.266709444812.576400490113.9㊀㊀由风机7个工况点可知:第5工况点所需功率为11.2kWꎬ全压为6954Paꎬ流量为3996m3/hꎬ能够满足设计的需求ꎮ2.2㊀联结方式的确定为简化机具的结构ꎬ设计利用拖拉机后轮轴固定挡泥板的两个螺纹孔来固定机架的主梁ꎮ机架由主梁㊁横梁及加强支撑等部件组成ꎬ风机和输风管等部件固定在机架上ꎮ机架的尺寸较短ꎬ作业及运输状态时摆动少ꎬ稳定性好ꎬ便于田间操作ꎬ结构如图2所示ꎮ图2㊀机架示意图Fig.2㊀Schematicdiagramofframe2.3㊀传动方式的确定风机的动力来源于拖拉机的动力输出轴ꎮ拖拉机皮带轮转速为1000r/minꎬ而风机的额定转速为2900r/minꎬ因此设计一级皮带轮变速即可满足传动要求ꎮ利用拖拉机动力输出轴与皮带轮的配合简化了机构ꎬ降低了机具成本ꎮ2.4㊀折叠机构的确定3MD-8型低量弥雾植保机的工作幅宽可达5.6mꎬ为避免运输㊁转弯时不便ꎬ在拖拉机液压机构提升臂与输风管间设置简易韧性连接装置ꎬ依靠提升臂的升降动力实现输风管折叠和伸直ꎮ2.5㊀喷头的确定为使喷雾能够集中对准作物ꎬ3MD-8型低量弥雾植保机作业时8个喷头各喷1行作物ꎮ该机采用转盘式超低量喷头ꎬ主要由喷口㊁分流锥㊁轴承㊁雾化盘组合及喷嘴轴等部件组成ꎬ如图3所示ꎮ雾化盘组合由前齿盘㊁后齿盘及驱动叶轮联结组成ꎬ此组件靠轴承支撑在喷嘴轴上ꎬ轴承盖安装在前齿盘的轴承座上起防尘㊁紧固的作用[6]ꎮ1.喷口㊀2.封闭盖㊀3.密封垫㊀4.分流锥㊀5.分流锥盖轴承㊀7.螺母㊀8.轴承压盖㊀9.雾化盘组合㊀10.喷嘴轴图3㊀喷头结构Fig.3㊀Structurediagramofnozzle拖拉机启动之后ꎬ由离心风机产生的高速气流进入喷口ꎬ遇到分流锥从喷口呈环状喷出ꎬ喷出的高速气流吹到驱动叶轮上ꎬ使雾化盘组件高速旋转ꎻ同时ꎬ流入喷嘴轴的药液从喷嘴轴上的一个小孔流出ꎻ进入前㊁后齿盘之间缝隙中的药液在高速旋转的前㊁后齿盘的离心作用下ꎬ沿着前㊁后齿盘外缘圆周上的齿尖抛出ꎬ破碎成细小的雾滴ꎻ雾滴被喷口内喷出的气流吹向远处ꎬ借气流及作物间的乱流和重力等作用被输送到作物上ꎮ2.6㊀药液箱的确定该机采用2个圆柱形药液箱ꎬ具有操作简便㊁成本低等优点ꎬ总容量为500Lꎮ药液箱结构示意图如图4所示ꎮ2.7㊀行距调整方式的确定机采棉种植模式的行距为76cmꎬ考虑到调整次数不多ꎬ因此采用加接风管和利用调节杆微调相结合的方式来实现行距调整ꎮ图4㊀药液箱示意图Fig.4㊀Diagramofliquidtank3㊀主要工作部件的设计与计算3.1㊀功率的计算由第5工况点可知ꎬ风机所需功率P=11.2kWꎮ1)雷沃M254-E型拖拉机最大输出轴功率P1为P1=0.86B(1)式中㊀B 拖拉机发动机功率ꎬ取B=18.8kWꎮ由公式(1)得ꎬP1=16.17kWꎬ大于风机所需功率ꎮ2)拖拉机可选择Ⅲ~Ⅳ挡作业ꎬ如按Ⅳ挡计算ꎬ已知机具使用质量M=2160kgꎬ阻力系数f=0.16ꎬⅣ挡时机具作业速度v=5.4km/hꎬ则滚动阻力所消耗的功率P2为P2=fMgv(2)式中㊀f 阻力系数ꎬ取值f=0.16ꎻ㊀M 机具使用质量ꎬ取M=2160kgꎻ㊀g 重力加速度ꎬ取g=9.8m/s2ꎻ㊀v Ⅳ挡时机具作业速度ꎬ取v=5.4km/hꎮ将数据代入公式(2)得:P2=5.08kWꎮ3)所需总功率P总ꎮ机组所需的总功率P总是风机所需功率与滚动阻力所消耗的功率之和ꎬ即16.28kWꎬ小于雷沃M254-E型拖拉机发动机功率18.8kWꎮ因此ꎬⅣ挡作业能够满足使用要求ꎬ功率得到充分合理的使用ꎬ机具功率匹配合理ꎮ3.2㊀皮带轮的设计与计算已知传递功率P=11.2kWꎬ风机额定转速n1=2900r/minꎬ动力输出轴皮带轮转速n2=1000r/minꎮ3.2.1㊀胶带断面型号的选择查阅机械设计手册ꎬ根据传递功率与风机额定转速选取胶带断面型号ꎮ普通V带选型如图5所示ꎬ胶带断面型号选B型带ꎮ图5㊀普通V带选型图Fig.5㊀OrdinaryVbeltselectionchart3.2.2㊀皮带轮的计算1)风机皮带轮公称直径D1取125mmꎮ2)动力输出轴皮带轮公称直径D2为D2=D1n1n2ːη(3)式中㊀D1 风机皮带轮公称直径ꎬ取D1=125mmꎻ㊀n1 风机额定转速ꎬ取n1=2900r/minꎻ㊀n2 动力输出轴皮带轮转速ꎬ取n2=1000r/minꎻ㊀η 传动效率ꎬ取η=98.5%ꎮ将数据代入公式(3)得:D2=368mmꎮ3)胶带速度v为v=πD1n160ˑ1000ɤvmax(4)式中㊀D1 风机皮带轮公称直径ꎬ取D1=125mmꎻ㊀n1 风机额定转速ꎬ取n1=2900r/minꎻ㊀vmax 普通V带的最大速度ꎬ一般vmax=25~30m/sꎮ将数据代入公式(4)得:v=18.97m/s<vmaxꎮ因此ꎬ胶带选择合适ꎮ4)根据实际ꎬ确定两皮带轮中心距A=810mmꎮ5)风机皮带轮包角α为α=180-D2-D1Aˑ57.3ʎ(5)式中㊀D1 风机皮带轮公称直径ꎬ取值D1=125mmꎻ㊀D2 动力输出轴皮带轮公称直径ꎬ取D2=368mmꎻ㊀A 两皮带轮中心距ꎬ取A=810mmꎮ一般情况下ꎬ小带轮包角应ȡ120ʎꎮ由公式(5)得:α=162.81ʎ>120ʎꎮ因此ꎬ小带轮包角合格ꎮ6)胶带计算长度L为L=2A+π2D1+D2()+D2-D1()24A(6)式中㊀D1 风机皮带轮公称直径ꎬ取D1=125mmꎻ㊀D2 动力输出轴皮带轮公称直径ꎬ取D2=368mmꎻ㊀A 两皮带轮中心距ꎬ取A=810mmꎮ将公式代入公式(6)得:L=2412.24mmꎬ取标准值2500mmꎮ7)胶带绕转次数μ为μ=1000vL(7)式中㊀v 胶带速度ꎬ取v=18.97m/sꎻ㊀L 胶带计算长度ꎬ取L=2500mmꎮ一般情况下ꎬ胶带绕转次数应小于10~15次/sꎮ由公式(7)得μ=7.59ꎬ合格ꎮ8)胶带根数Z计算公式为Z=PK1K2P0+ΔP0()(8)式中㊀P 传递功率ꎬ取值P=11.2kWꎻ㊀K1 小带轮包角修正系数ꎬ取K1=0.95ꎻ㊀K2 带长修正系数ꎬ取K2=1.03ꎻ㊀P0 特定条件下单根胶带传递的功率ꎬ取P0=2.96kWꎻ㊀ΔP0 单根胶带传递功率的增量ꎬ取ΔP0=0.79kWꎮ由公式(8)得Z=3.05ꎬ取整为3根胶带ꎮ3.3㊀输风管道的设计输风管的作用是将风机产生的气流输送到雾化喷头ꎮ输风管除直长部分外ꎬ还有使气流转弯的弯头ꎮ空气通过弯头的阻力比直长部分大得多ꎬ因此管件设计合理与否与输风的效果有直接关系ꎮ弯头的曲率半径R越大ꎬ空气受到的阻力越小ꎬ一般R取1~2倍的管道直径ꎮ弯头的角度越大ꎬ空气受到的阻力越大ꎬ根据使用要求取弯头角度为90ʎꎮ弯头环节不应过多ꎬ弯头环节过多ꎬ看起来虽然圆滑ꎬ但节缝也会相应增多ꎬ并不能减少阻力ꎮ因此ꎬ取每个环节15ʎ~18ʎꎬ每个弯头取5~6个环节ꎮ输风管的结构图如图6所示ꎮ图6㊀输风管结构图Fig.6㊀Structurediagramofairduct2019年8月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第8期4㊀室内性能测定4.1㊀雾滴直径的测定测定方法参照试验大纲ꎬ沿雾滴轴向在射程范围内放7个测试点ꎬ每个测试点重复取样3次ꎬ共取样雾滴242个ꎮ取样后经数据处理ꎬ用数理统计法分别计算平均雾滴直径d㊁标准差s㊁平均数标准误差sd㊁变异系数v㊁雾滴直径Dꎬ结果如表3所示ꎮ表3㊀雾滴直径测定表Table3㊀Determinationofdropletdiameter测定项目单位数值平均雾滴直径dmm104标准差smm43平均数标准误差sdmm2.81变异系数v%41雾滴直径Dmm104ʃ2.81㊀㊀由表3可知:雾滴直径在101~107μm范围内ꎬ符合设计要求(设计要求不大于150μm)ꎮ经统计ꎬ雾滴直径58~140μm的数量占76%ꎬ30μm以下的雾滴仅占2%ꎮ据资料介绍ꎬ在气候干燥的条件下ꎬ30μm以下雾滴利用率小于0.5%ꎬ100μm雾滴的利用率约80%ꎮ因此ꎬ从雾滴试验测试情况看ꎬ该机雾化良好ꎮ4.2㊀水平射程与喷幅的测定根据试验大纲的要求ꎬ对单喷头进行水平射程和喷幅的测定ꎬ以气流达到2m/s流速的最远边界到喷口的水平距离为射程ꎬ和射程垂直的最远边界为喷幅ꎬ重复3次测得平均射程为3mꎬ喷幅为0.6mꎬ结果如表4所示ꎮ表4㊀射程与喷幅测定表Table4㊀Rangeandspreadmeasurementtable测定次数水平射程/m喷幅/m130.6230.6330.6平均值30.64.3㊀喷雾量与残留液的测定根据试验大纲的要求ꎬ将药箱装满500L清水ꎬ按工作状态进行喷洒ꎬ记录喷完所需时间ꎬ收集残留液体ꎮ测定喷完500L水所需时间为42minꎬ计算得每分钟平均喷雾量为12Lꎬ药箱利用率为99.9%ꎬ结果如表5所示ꎮ表5㊀喷雾量与残留液测定表Table5㊀Sprayvolumeandresidualliquiddeterminationtable测试项目喷雾量/L min-1残留液量/L喷射状态1120.3水平2120.5水平3120.7水平平均值120.54.4㊀拖拉机配套机组稳定性测定拖拉机机组稳定性测定时ꎬ考虑到低架比高架稳定ꎬ因此只测定高架稳定性即可ꎮ测定方法:将药液箱装满水ꎬ驾驶座上坐1人称量机组质量(即机组使用质量)Pꎬ把前轮置于磅秤上测定其质量P1ꎻ然后把前轮垫高hꎬ测定其质量P2ꎻ列力矩方程式ꎬ算出重心坐标ꎮ测量结果为:机组总质量P=2250kgꎬ前轮质量P1=730kgꎬ前轮垫高h=150mm后称重P2=660kgꎬ后轮质量P3=1520kgꎬ拖拉机高架轴距L=1639mmꎬ轮距B=1460mmꎮ1)机具重心到后轴距离a为a=P1LP(9)由公式(9)得:a=532mmꎮ2)机具重心到地面的垂直距离H为H=r+P1-P2PˑLhL2-h2(10)式中㊀r 后轮半径ꎬ取r=300mmꎻ㊀P1 前轮质量ꎬ取P1=730kgꎻ㊀P2 前轮垫高后的质量ꎬ取P2=660kgꎻ㊀P 机组总质量ꎬ取P=2250kgꎻ㊀L 拖拉机高架轴距ꎬ取L=1639mmꎻ㊀h 前轮垫高高度ꎬ取h=150mmꎮ由公式(10)得:H=855mmꎮ3)上坡极限角α上为(见图7)α上=arctanaH(11)式中㊀a 机具重心到后轴距离ꎬ取a=532mmꎻ㊀H 机具重心到地面的垂直距离ꎬ取H=855mmꎮ将数据代入公式(11)得:α上=31.89ʎ4)下坡极限角α下为α下=arctanL-aH(12)式中㊀L 拖拉机高架轴距ꎬ取L=1639mmꎻ㊀a 机具重心到后轴距离ꎬ取a=532mmꎻ㊀H 机具重心到地面的垂直距离ꎬ取H=855mmꎮ将数据代入公式(12)得:α下=52.32ʎꎮ5)横向极限角α横为(见图8)α横=arctan0.5B-eH(13)式中㊀B 轮距ꎬ取B=1460mmꎻ㊀e 重心对左右轮胎对称面的偏移量ꎬ由于该机组配置基本对称ꎬe可忽略不计ꎻ㊀H 机具重心到地面的垂直距离ꎬ取H=855mmꎮ将数据代入公式(13)得:α横=40.49ʎꎮ未安装机具时ꎬ雷沃M254-E型拖拉机上坡极限角α上为36.85ʎꎬ下坡极限角α下为48.35ʎꎬ横向极限角α横为36.88ʎꎮ与未安装机具时的雷沃M254-E型拖拉机相比较ꎬ悬挂机具后上坡极限角减少了4.96ʎꎬ下坡极限角增加了3.97ʎꎬ横向极限角增加了3.61ʎꎬ能够满足使用要求ꎮ图7㊀机组上坡极限角示意图Fig.7㊀Aerialdiagramoftheupperlimitoftheunit图8㊀机组横向极限角示意图Fig.8㊀Horizontallimitangleofunit5㊀田间试验5.1㊀防治棉铃虫试验项目组先后进行了多次田间防治棉铃虫和蚜虫的试验ꎮ查虫方法是:在试验田内取5个测试点ꎬ每点数棉株20株ꎬ把喷药前后每个点查得的幼虫㊁卵分别记录ꎮ在田间试验时ꎬ除了对棉铃虫和蚜虫的防治效果进行调查外ꎬ还进行了不同浓度药液在不同作业速度下合理配备的考查ꎮ例如ꎬ拖拉机由Ⅲ挡(3.4km/h)提高到Ⅳ挡(5.4km/h)进行作业ꎬ每667m2施药量不变ꎬ药液浓度由Ⅲ挡833倍提高到Ⅳ挡400倍ꎬ每667m2施药液量由11L降低为3Lꎮ后经统计ꎬ杀虫效率并没有降低ꎬ仍可达95%以上ꎮ这说明每公顷施药量不变ꎬ适当减少药液量(即提高药液浓度和作业速度)ꎬ既不降低杀虫效率ꎬ又能省水和提高生产率ꎮ田间试验均使用Ⅳ挡作业ꎬ药液400倍配制ꎮ防治棉铃虫情况如表6所示ꎮ表6㊀防治棉铃虫情况表Table6㊀Controlofcottonbollworm速度/km h-1药液浓度查虫日期喷药时间第1点卵成虫残体第2点卵成虫残体第3点卵成虫残体第4点卵成虫残体第1 点卵成虫残体杀虫效率/%3.4833倍液6月25日6月25日520037370002600593024h4217106000020010202548h01002000000001098.0续表6速度/km h-1药液浓度查虫日期喷药时间第1点卵成虫残体第2点卵成虫残体第3点卵成虫残体第4点卵成虫残体第1 点卵成虫残体杀虫效率/%3.4833倍液6月26日6月26日35301730382000000024h35301730382000000048h00000000000000098.454400倍液6月29日6月29日1400700900200010096h0000000000000001005.2㊀防治蚜虫试验项目组在防治棉铃虫的同时ꎬ也进行了防治蚜虫的调查ꎬ如表7㊁表8所示ꎮ由防治蚜虫情况表可知:蚜虫减退率可达98%以上ꎮ表7㊀喷药前蚜虫记录表Table7㊀Aphidrecordbeforespraying作业速度/km h-1药液浓度用药量/mL 667m-2查虫日期喷药日期喷药前百株蚜虫头数第1点第2点第3点第4点第5点合计5.4400456月8日6月8日1616512263210222947400456月22日6月22日1973051723961931263表8㊀喷药后蚜虫记录表Table8㊀Aphidrecordafterspraying喷药后时间/h喷药后百株蚜虫头数第1点第2点第3点第4点第5点合计减退率/%24520482681972453515851315398.85.3㊀雾滴附着状况调查进行该项查定时ꎬ棉株高度40cmꎬ每株平均叶片数45个ꎮ取样方法采用纸卡法ꎬ即在每一观察点上中下3层固定纸卡ꎬ在药液中加1%的染料ꎬ按正常状态进行喷洒ꎬ喷后收回纸卡ꎻ以5~10倍手持式放大镜观察ꎬ并数出每张纸卡上的雾滴数及计算每平方厘米面积的雾滴数ꎮ通过查定可以看出:无论棉株上部还是中部ꎬ叶片着药最多的都连成片ꎬ下部最少的叶片也不少于每平方厘米25个雾滴ꎮ附着状况如表9所示ꎮ据每平方厘米雾滴数大于20个为有效雾滴的经验可以看出:3MD-8型低量弥雾植保机在株高40cm左右时ꎬ无论在叶的正面还是反面ꎬ雾滴附着都比较均匀ꎬ因此杀虫效果都比较显著ꎮ表9㊀雾滴附着状况测定表Table9㊀Measuringtableofdropletattachedcondition植株检查部位和项目上中下每平方厘米雾低数最高最低成片成片成片503829有效叶片占总叶片数/%1001001000个雾滴叶片占总叶片数/%0005.4㊀田间实际喷药液量的测定按田间实际作业状况ꎬ药箱装入额定药液ꎬ测定喷完一药箱药液机具进行的距离及作业幅宽ꎬ重复3次ꎬ按公式(12)计算每667m2药量ꎮQ=GBLˑ667(12)式中㊀Q 实际用药量ꎻ㊀G 额定用药量ꎻ㊀B 工作幅宽ꎻ㊀L 工作距离ꎮ田间实际喷药液量如表10所示ꎮ表10㊀田间实际喷药液量测定表Table10㊀Measuringtableofactualamountofliquidinthefield测试次数加药液量/mL作业幅宽/m行进距离/m喷药液量/mL112244.83055.655.66212244.8277861.23312244.8333351.036㊀结论1)该机主要由风机㊁动力输出轴㊁皮带轮㊁输风管㊁药液箱㊁机架及喷头等部件组成ꎬ造价低ꎮ雾滴采用风力雾化ꎬ管道压力较小ꎬ喷头不易磨损ꎮ喷头喷孔大ꎬ无堵塞现象ꎬ作业期间基本不出故障ꎬ机具可靠性良好ꎮ2)由于采用低量弥雾原理ꎬ每667m2用水量少ꎮ与常量喷雾机相比ꎬ可节约用水50%~70%ꎬ从而提高了作业效率ꎮ3)防治效果好ꎮ低量弥雾喷量低ꎬ喷后叶面不出现滴落现象ꎬ药液浓度高ꎬ药效持久ꎬ雾粒细ꎬ覆盖性能好ꎬ杀虫效果可达95%以上ꎮ4)该机利用主机液压升降机构拉紧韧性连接装置实现输风管折叠ꎬ结构简单ꎬ操作灵活ꎮ作业方式采用顺行作业ꎬ喷头在作物上部ꎬ高于作物15cmꎬ田间通过性能良好ꎮ作业时ꎬ只要操作正确ꎬ机具本身不存在挂枝划蕾现象ꎮ参考文献:[1]㊀刘刚ꎬ张晓辉ꎬ范国强ꎬ等.棉花施药机械的应用现状及发展趋势[J].农机化研究ꎬ2014ꎬ36(4):225-228. [2]㊀初晓庆ꎬ张晓辉ꎬ刘刚ꎬ等.有边界式棉田喷雾机的研制与试验[J].中国农机化ꎬ2016ꎬ37(7):51-56. [3]㊀贾晓红.农作物化学调控技术应用的思考[J].农业技术与装备ꎬ2009(22):17-18.[4]㊀王帅.国内植保机械发展探析[J].农业科技与装备ꎬ2012(9):42-43.[5]㊀张晓辉ꎬ郭清南ꎬ李法德ꎬ等.3MG30型果园弥雾机的研制与试验[J].农业机械学报ꎬ2002(3):30-33. [6]㊀中国农业机械化科学研究院.农业机械设计手册[K].北京:中国农业科学技术出版社ꎬ2007:653.DesignandTestof3MD-8TypeLowVolumeMistProtectionMachineSunDongxiaꎬLiMingjunꎬCaoLonglongꎬLiWeiꎬWangChengꎬZhangAimin(BinzhouAgriculturalMachineryResearchInstituteꎬBinzhou256600ꎬChina)Abstract:Inordertosolvetheproblemsoflargeamountofpesticideappliedandlowutilizationofliquidmedicineꎬtheprojectgroupdesigned3MD-8typelowvolumemistprotectionmachine.Themachineusestheprincipleofwindatomiza ̄tionandwindtransmissiontospraytheliquidinto70~150microndropletsꎬwhichismainlyusedforplantprotectioncontrolofhighandmediumcropssuchascottonandsoybean.Themaincomponentsofthemachineincludefanꎬairtransmissionpipeꎬliquidboxꎬsprinklerꎬframeandsoonꎬandthestructureissimpleandthecostislow.Theairtrans ̄missionpipeisfoldedthroughtheductileconnectionwiththehydraulicliftingmechanismofthetractorꎬandtheoperationisconvenient.Theindoorandfieldtestresultsshowthatthemachinehasgoodperformanceandreliableoperation.Com ̄paredwiththeconstantsprayerꎬitcansave50%to70%oftheliquidꎬandtheinsecticidaleffectismorethan95%.Keywords:plantprotectionmachineꎻwindatomizationꎻthemistꎻlowvolume。